Przeszukaj forum
Pokazywanie wyników dla tagów 'raspberry'.
Znaleziono 7 wyników
-
Witam, taki luźny temat mi przyszedł do głowy z racji tego że mam kilka starych komputerów stacjonarnych zacząłem sie zastanawiać czy można by je wykorzystać do podobnych celów jak np raspberry pi. Oczywiście biorąc pod uwagę gabaryty "skrzynki" rozważam np jakąś instalacje stacjonarną typu grow box itp. Wiadomo pojawia się kwestia wejść i wyjść. Czy na plycie głównej jest coś co można wykorzystać w tym celu? Ewentualnie złącza usb dają chyba duże możliwości w tym zakresie, tylko jak to ugryźć programowo. Wiecie coś o takich projektach/wykorzystaniu komputera stacjonarnego? Doradźcie coś jak temat ugryźć bo nawet google za dużo nie podpowiada w tym temacie. Zapraszam wszystkich do dyskusji. Pozdrawiam
-

Freestyle Robot gąsienicowy PENETRATOR
Arturo opublikował temat w Projekty - DIY w budowie (worklogi)
Cześć. Chciałem wam pokazać projekt nad którym pracuję: PENETRATOR Trochę konkretów: aluminiowy kadłub napęd: dwa silniki elektryczne szczotkowe 9V zasilanie 2 x 18650 + 2 x 18650 ukryte pod kadłubem kontroler: Raspberry Pi 3 A+ wizja: moduł kamery 1080p emitery IR umożliwiające kamerze pracę w ciemnościach łączność: WiFi (access point i serwer HTTP) język programowania : Python 3 sterowanie i obraz: autorska aplikacja webowa (w przeglądarce) umożliwiająca wyświetlanie obrazu z kamery i sterowanie robotem W PLANACH: mechaniczne ramię 7DOF oparte na serwomechanizmach MG996R obracanie kamery w 2 płaszczyznach przy pomocy serwomechanizmów mam też ochotę pobawić się sztuczną inteligencją, stąd wybór raspberry a nie np. esp8266 Przy okazji, podziękowania dla Forbot.pl za podstawy które wprowadziły mnie do świata robotyki


- 10 odpowiedzi
-
- 6
-

-
- gąsienicowy
- robot
- (i 2 więcej)
-
Dzień dobry, na wstępie opiszę z grubsza założenia projektu - w przyszłości pracy inżynierskiej. Priorytetowym zadaniem, jakie ma stanąć przed moim robotem jest okrążenie kampusu mojej uczelni. Teren nie jest prosty, robot będzie miał do pokonania wyboiste drogi(częściowo przejazd przez las), krawężniki, trawniki i parkingi. Sterowanie ma być ręczne, realizowane zdalnie, za pośrednictwem internetu. Okrążenie to około 3km, zakładany czas przejazdu to niecała godzina. Konstrukcja opiera się na ramie zbudowanej z profili alu, o wymiarach 400x600. Do ramy będzie przymocowane większość osprzętu robota. Zawieszenie niezależne, 4 wahacze wzdłużne zawieszone na amortyzatorach do samochodów rc. Jako napęd 4 silniki wraz z przekładniami od samochodów dla dzieci. Koła 12 cali od wózka dziecięcego Część elektroniczna składa się z: Raspberry Pi 3, ICSTATION UNO, 4xmostek H VNH2SP30, przetwornica napięcia 5v USB, czujniki odległości(jeszcze nie wybrane), kamera(prawdopodobnie internetowa usb) Tyle z założeń, robot jest już w zaawansowanej fazie budowy. Zaczęło się od projektu w semestrze zimowym 2019/2020, projekt został zaliczony, jego dokumentacja tutaj(dokumentacja), a filmik zaliczeniowy z pierwszej jazdy terenowej poniżej Na tej fazie robot całą elektronikę miał zamontowaną "na taśmę", ze względu na zamówienie niewłaściwych kołków do pcb, a termin gonił. Obecnie robot jest rozebrany z całej elektroniki, powstaje miejsce w którym pojawią się akumulatory i elektronika(puszka elektryczna), osobny wyłącznik awaryjny oraz doprowadzenie kabli do silników. Poniższe zdjęcie przedstawia obecny stan robota: Aktualnie czekam na osłony na silniki wydrukowane w 3d, po zamontowaniu wszystkiego z zewnątrz będę mógł przejść do środka. W środku planuję zrobić ramkę z kątownika alu 20x20, w której będą miejsca na akumulatory(dwa akumulatory umieszczone po bokach), a pomiędzy nimi ma zostać umieszczona elektronika w sposób warstwowy(poziom 1: mostki H, poziom 2: ICSTATION UNO, poziom 3: Raspberry Pi 3). Poza tymi warstwami muszę znaleźć jeszcze miejsce na przetwornicę napięcia i mobilny ruter wifi. Całą ramkę chcę umieścić na gąbce, która by amortyzowała wstrząsy, tak samo zabezpieczyłbym moduł od góry. Dziękuję za uwagę, postępy i pytania będę starał się wrzucać tu na bieżąco.

-
Witam serdecznie, robię coś "ala inteligentny dom" i brakowało mi gpio na malince. Podłączyłem mcp23017 i działa:) Działa jako wyjście:/ Jak zrobić żeby działało jako wyjście? A takie ważniejsze i chyba trudniejsze pytanie (jak dla mnie) to: Jak połączyć malinkę z arduino przez usb?? tak żeby arduino działało jako we/wy?? Nie liczę na gotowca, ale jakieś wskazówki. Nie jestem też jakimś tam hiper, biper, diker informatykiem. Skoro potrafiłem podłączyć mcp23017 i "ledami mrugać" to myślę że arduino podłączę jako we/wy do malinki;) Pozdrawiam serdecznie;) p.s. Zapomniałem dodać, że to wszystko obsługuję na domoticz.
-

Raspberry - podstawowe informacje, dobór rozwiązań do projektu
Magdalenaa opublikował temat w Raspberry Pi
Cześć To mój pierwszy wpis na forum, rok temu zaczęłam studia na politechnice, naukę rozpoczęłam od mikrokontrolerow AVR. Dziś już wiem, że chce kontynuować naukę polegajac na raspberry niestety nie mam o nich kompletnie żadnej wiedzy. Mam plan wykonać projekt obrony pracy w oparciu o ten minikomputer dlatego chciałabym przez najbliższy rok poznać go dość dobrze ☺moim planem jest stworzenie programu zaawansowanego graficznie który będzie się otwierał automatycznie po uruchomieniu malinki. Zaawansowany graficznie czyli program wspierający obsługę wysokiej rozdzielczosci animacji. Stosowanie wlasnych obiektow takich jak progres bar, przyciski itp. ( nie chce korzystac z default'owych ze wzgledu na bardzo nieatrakcyjny wyglad ). Wiem tez ze konieczna bedzie wspolpraca malinki z UARTem. ponieważ wielu z Was ma wielkie doświadczenie proszę na początek o poradę w kilku kwestiach: 1. Czy lepiej kupić mailnke wersji 4 czy 3 ? Pomijając koszty, osobiście myślę że lepiej kupić bardziej przyszlosciowa płytkę wiec skłaniam się ku najnowszej wersji. Niestety większość informacji na forach dotyczy wersji 3 i obawiam się czy oby na pewno wszystkie informacje będą kompatybilne z najnowszym projektem. 2. Jaki system operacyjny zastosować do swojego projektu i jakie są ich plusy /minusy. Początkowo myślałam o windowsie chociaż Internet mówi tylko o wadach tego systemu. Szkoda bo dość dobrze radzę sobie w Visual studio i znam ten system dość dobrze. Mimo wszystko chętnie uczę się nowych rzeczy wiec jeśli waszym zdaniem Windows się nie nadaje to proszę mówić o tym wprost 3. Najważniejsze... w jakim programie / środowisku należy pisać programy na raspberry Tak aby idealnie nadawały się do mojego projektu. Jak wspomnialam wcześniej dobrze czuje się w Visual studio, mam też trochę wiedzy na temat języka C, C#. Może da się to jakoś wykorzystać? z góry dziękuję za waszą pomoc i jestem wdzięczna za zaangażowanie -
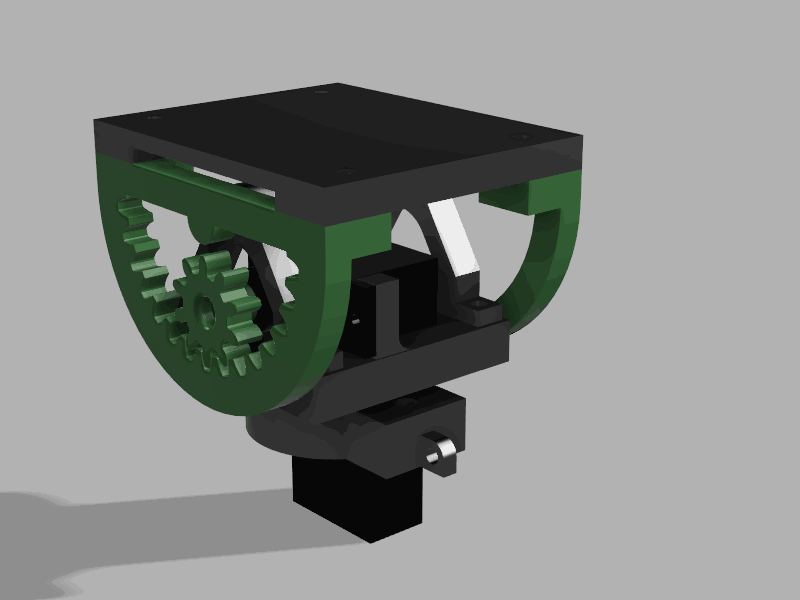
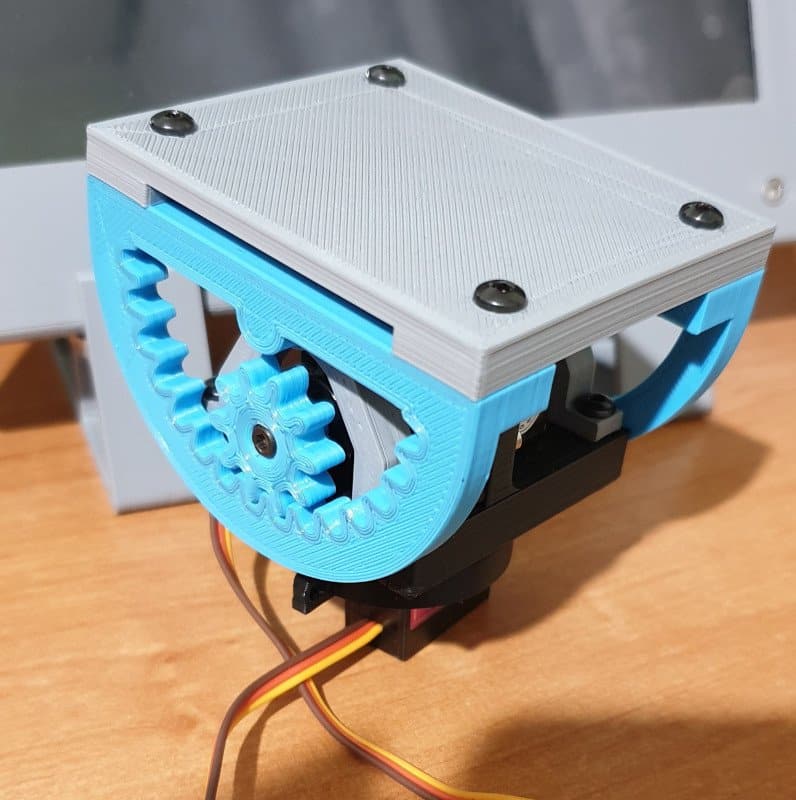
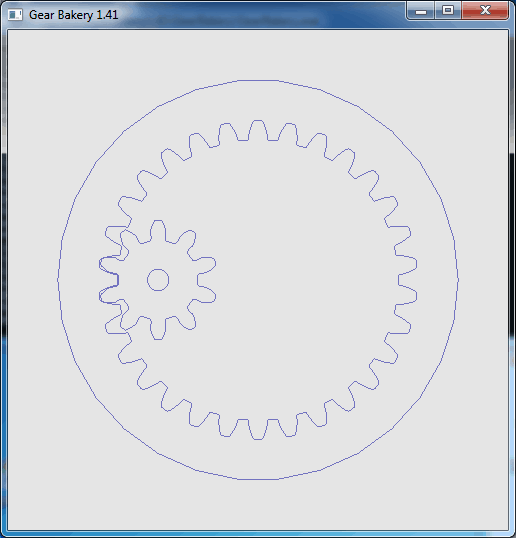
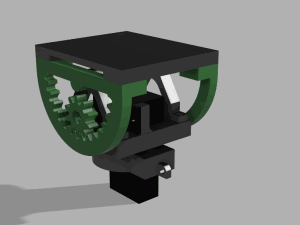
Raport mniejszości Oglądaliście kiedyś ten film? Główny bohater posługiwał się tam futurystycznym (przynajmniej jak na tamte czasy) interfejsem, którym sterował przy pomocy gestów. Fragment, który mam na myśli, możecie obejrzeć na Youtube. Osiągnięcie takiego poziomu zaawansowania wymaga oczywiście lat pracy, ale możemy spróbować skonstruować urządzenie, które będzie namiastką opisanego powyżej interfejsu. Koncepcja Zbudujemy urządzenie typu pan-tilt, czyli platformę obracającą się w dwóch osiach, sterowaną serwami. Sterowanie odbywać się będzie zdalnie, poprzez przechylanie telefonu komórkowego - platforma będzie próbowała naśladować gesty wykonywane przy pomocy telefonu. Platforma Na początku sama platforma - zdecydowałem się zaprojektować własną od zera, bazując na projekcie znalezionym na Thingiverse. Obrót w osi poziomej jest zmniejszony przez zębatkę - pozwala ona mniej więcej na 1/3 oryginalnego zakresu ruchu, ale za to jest on bardziej płynny. Obrót wokół osi pionowej jest natomiast nieograniczony. Pewnym kłopotem okazały się zębatki - przygotowanie dobrego koła zębatego wbrew pozorom wcale nie jest tak prostym zadaniem, jakim mogłoby się wydawać. Co więcej, nie ma również zbyt dużo narzędzi pozwalających na wygenerowanie prawidłowych kół zębatych. Po długich poszukiwaniach udało mi się jednak odnaleźć odpowiednie narzędzie - umożliwia ono konstruowanie kół zewnętrznych, wewnętrznych oraz listew zębatych: Gear Bakery. Wygenerowane koła zębate zapisywane są jako pliki .dxf, a te można już bez problemu wciągnąć do Fusion 360. Założyłem, że platforma będzie obracana zwykłymi, małymi serwami modelarskimi. Docelowo planowałem postawić na niej co najwyżej sportową kamerkę, więc moment rzędu 1.8 kg*cm jest tu całkowicie wystarczający. Pozostało wymodelowanie i wydrukowanie części, z których złożyłem potem platformę. Kontroler Tym razem potrzebowałem trochę więcej mocy obliczeniowej niż w wypadku prostszych projektów - w końcu musiałem postawić serwer odbierający dane po UDP - zdecydowałem się więc na Raspberry Pi. Serwer napisałem w Pythonie, bo język ten jest stosunkowo wysokopoziomowy i mocno separuje programistę od warstwy systemu i sprzętu: mogłem dzięki temu skupić się na istocie zadania, a nie na detalach implementacyjnych. Raspberry ma jednak pewną wadę - nie za dobrze radzi sobie z generowaniem sygnału PWM - sprzętowo może robić to tylko na jednym pinie. Co gorsza, standardowa biblioteka RPi.GPIO pozwala jedynie na programowe generowanie PWM - nie dawało to zbyt dobrych efektów. Na szczęście problem ten można bardzo elegancko obejść. Firma Adafruit przygotowała bowiem cwany układzik, który pozwala na sterowanie przy pomocy PWM aż dwunastoma niezależnymi urządzeniami, natomiast komunikacja tego układu z Raspberry odbywa się już po moim ulubionym protokole, czyli I2C. Układ ten rozwiązał jeszcze jeden problem, którego istnienie uświadomiłem sobie tak naprawdę w momencie, gdy właśnie zniknął. Serwa trzeba przecież jakoś zasilić, a nie można podłączyć ich do pinu 5V Raspberry - mają przecież znacznie większe zapotrzebowanie prądowe. PCA9685 w tym celu wyprowadza jednak szybkozłączkę, do której można podpiąć zewnętrzne zasilanie. Za każdym razem, gdy potrzebuję gdzieś 5V, zwykle robię mały przekręt: korzystam z kontrolera silnika bezszczotkowego, do którego przylutowałem wtyczkę T-Dean. Oprócz tego - co oczywiste - że ESC służy do sterowania silnikiem, obniża on również napięcie do 5V i przekazuje przewodami, które normalnie podłącza się do odbiornika RC. W pierwotnym zamyśle mechanizm ten nosił nazwę BEC - Battery Eliminator Circuit - i pozwalał w łatwy sposób zasilić odbiornik RC bez użycia dodatkowego akumulatora. Tymczasem wystarczy ominąć pin sterowania i mamy mały, wygodny, mobilny zasilacz na 5V. Konfiguracja Raspberry Aby mój skrypt w Pythonie uruchomił się, konieczne jest doinstalowanie biblioteki Adafruit pozwalającej na sterowanie kontrolerem PCA9685. Na początku trzeba oczywiście włączyć szynę I2C; robimy to w oknie konfiguracji Raspberry. Potem upewniamy się, że zainstalowane są następujące pakiety: sudo apt-get install python-smbus sudo apt-get install i2c-tools Po zainstalowaniu i2c-tools możemy użyć programiku i2cdetect, żeby sprawdzić, czy Raspberry prawidłowo wykrył kontroler PCA9685: ~ $ sudo ic2detect -y 1 0 1 2 3 4 5 6 7 8 9 a b c d e f 00: -- -- -- -- -- -- -- -- -- -- -- -- -- 10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 40: 40 -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 70: 70 -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- Teraz możemy ściągnąć i zainstalować bibliotekę do Pythona. sudo apt-get install build-essential python-dev cd ~ git clone https://github.com/adafruit/Adafruit_Python_PCA9685.git cd Adafruit_Python_PCA9685 sudo python setup.py install Uruchamiamy Do uruchomienia całego urządzenia potrzebujemy dwóch kawałków kodu, jednego mniejszego, drugiego większego. Tym mniejszym jest serwer w Pythonie, który steruje serwami. Możecie go ściągnąć z mojego repozytorium albo po prostu przekleić, bo jego kod jest stosunkowo krótki: # -*- coding: utf-8 -*- import socket import sys import time import Adafruit_PCA9685 # Częstotliwość sterowania PWM FREQUENCY = 50 # Czas jednego cyklu CYCLE_TIME = 1 / float(FREQUENCY) # Procentowy czas cyklu dla położenia minimalnego SERVO_MIN_PERCENT = 0.00055 / CYCLE_TIME # Procentowy czas cyklu dla położenia maksymalnego SERVO_MAX_PERCENT = 0.00245 / CYCLE_TIME # Wartość minimalna dla 4096 kroków SERVO_MIN = int(4096 * SERVO_MIN_PERCENT) # Wartość maksymalna dla 4096 kroków SERVO_MAX = int(4096 * SERVO_MAX_PERCENT) # Tworzymy obiekt pwm (przyjmie domyślnie adres 0x40) pwm = Adafruit_PCA9685.PCA9685() pwm.set_pwm_freq(FREQUENCY) def setAngle(channel, angle): pwm.set_pwm(channel, 0, int(SERVO_MIN + (float(angle) / 180.0) * (SERVO_MAX - SERVO_MIN))) def processCommand(command): angles = command.split("|") angles = list(map(lambda x: max(-90, min(90, -int(x.strip()))) + 90, angles)) print("P: {0}, Y: {1}".format(angles[0], angles[2])) setAngle(14, int(angles[0] / 10) * 10) setAngle(15, int(angles[2] / 10) * 10) def main(): # Create TCP/IP socket sock = socket.socket(socket.AF_INET, socket.SOCK_DGRAM) # Bind the socket to the port server_address = ('', 10000) sock.bind(server_address) print("Waiting for data...") buffer = "" try: while True: data, addr = sock.recvfrom(32); buffer = buffer + data commandEnd = buffer.find(";") if (commandEnd != -1): command = buffer[0:commandEnd] buffer = buffer[commandEnd+1:] processCommand(command) except KeyboardInterrupt: print('Ctrl+C received, closing...') # Start program main() Drugi program jest już większy - to aplikacja na Androida, która pozwala na podłączenie się do serwera i przesyłanie informacji o orientacji telefonu. Ta również dostępna jest w moim repozytorium, tylko tym razem trzeba kod już ściągnąć i przebudować w Android Studio. Efekt Końcowy efekt na zdjęciu będzie wyglądał marnie, dlatego przygotowałem krótki filmik prezentujący, jak uruchomić cały projekt i jakie są efekty jego działania: Wnioski Serwa są bardzo wygodne w montażu i obsłudze, ale niestety również mało precyzyjne. Do takiego prostego projektu nadają się świetnie, ale w warunkach produkcyjnych trzeba byłoby wymienić je na ciche i dokładne silniki bezszczotkowe - takie, jakie są używane w gimbalach. Platforma reaguje na specyficzne ułożenie komórki; dzieje się tak dlatego, że komórka obrót wokół osi pionowej wysyła jako odchylenie od północy (0 stopni to północ). Tymczasem platforma "nie wie", w którą stronę jest zwrócona. Aby projekt był bardziej uniwersalny, można zastosować jedno z dwóch rozwiązań: dodać czujnik orientacji do platformy i kompensować różnice albo zapamiętać ułożenie komórki podczas łączenia do serwera i uznać je za pozycję "zerową". Mojemu projektowi daleko oczywiście do zaprezentowanego rozwiązania w "Raporcie mniejszości", ale nie ukrywam, że dał mi sporo frajdy. Można wykorzystać go jako bazę do zdalnego sterowania położeniem kamery lub na przykład ramienia robota.




-
Witam Szanowne grono forum FORBOT mianowicie tak jak w tytule mam problem z przesłaniem danych temperatury do domoticza w raspberry Mianowicie robie wszystko tak ja podane na tej stronie http://kostrzewinki.pl/1-schemat-podlaczenia-czujnika-temperatury-wilgotnosci-dht-11/ po wywołaniu polecenia sudo ./AdafruitDHT.py 11 4 temperatura jak i wilgotnosc sie wyswietla potem tworze plik poleceniem sudo nano temp.sh i tu moje pytanie czy trzeba tworzyc na tym etapie gdy w konsoli mam Czy utworzyc ten plik gdy wyjde z adafruit_python_DHT/examples S np przez utworzenie nowej sesji... Nastepnie dodaje w tym pliku kod # Domoticz server SERVER="192.168.0.15:8080" # DHT IDX DHTIDX="107" # DHTPIN DHTPIN="4" sleep 5 sudo nice -20 python /home/pi/Adafruit_Python_DHT/examples/AdafruitDHT.py 11 $DHTPIN > /var/tmp/temp.txt #TEMP=$(cat /var/tmp/temp.txt | grep "Temp" | awk '{ print $3 }') #TEMP=$(cat /var/tmp/temp.txt | grep "Temp") TEMP=$(awk ' /Temp/ {print substr ($0,6,4)}' /var/tmp/temp.txt) #HUM=$(awk ' /Hudmidity/ {print substr ($0,0)}' /var/tmp/temp.txt) #HUM=$(awk ' /Humidity/ {print 1$}' /var/tmp/temp.txt) HUM=$(awk ' /Humidity/ {print substr ($0,22,4)}' /var/tmp/temp.txt) echo $TEMP echo $HUM # Send data curl -s -i -H "Accept: application/json" "http://192.168.0.15:8080/json.htm?type=command&c=getauth¶m=udevice&idx=107&nvalue=0&svalue=$TEMP;$HUM;2" TEMP="" HUM="" Potem zapisuje plik podaje sudo chmod +x temp.sh Dadaje do crontab -e oczywiscie wszystko wczesnie zrobione w domoticz przycisk wirtualny etc. ale temperatura nie zmienia sie cały czas jest 0st Prosze o JAKAS PODPOWIEDZ. Cos gdzies robie nie tak tylko jeszcze nie wiem co.