Przeszukaj forum
Pokazywanie wyników dla tagów 'ble'.
Znaleziono 4 wyniki
-
Witam czcigodne forum! Mam ciekawy problem - potrzebuję zrobić zdalne powiadomienie o naruszeniu strefy (na zasadzie - klient wszedł do biura, gdy pracownik jest na zapleczu) - ale rozwiązanie, które nie jest wyjcem na fotokomórkę. 2x stacjonarnie nie ma problemu: dwa ESP32 spięte BT/Zigbee, jedno z PIR albo detektorem 40GHz, drugi z diodą i głośniczkiem. Wolałbym jednak odbiornik/sygnalizator zrobić "wearable" np opaska albo breloczek. Na myśl przychodzą mi tanie breloki trackingowe BLE (np Blow-a) albo opaski (jakiś najtańszy smartband z Ali) - ale nie mają opublikowanych protokołów. Pewnie byłbym w stanie wystrugać coś samemu w rozmiarze pudełka papierosów (coś typu XIAO ESP32C3, wibrator i głośniczek ze starej komórki, akumulatorek li-po), ale wolałbym coś gotowego. Czy ktoś z szanownych Forumowiczów zna jakieś bateryjne/akumulatorowe urządzenie BLE/Zigbee ze znanym/otwartym protokołem wyzwolenia sygnalizacji, zasięg ok. 15m? Pozdrawiam
-
 Cześć, chciałbym prosić o pomoc w kwestii podpięcia modułu Pmod BLE do płytki Zybo Z7-10. Opis projektu Chciałbym podłączyć Pmod BLE do płytki Zybo Z7-10. Chciałbym by testowa aplikacja mogła wysyłać i odbierać dane po bluetooth (do testowania chciałbym użyć jakiejś aplikacji z AppStore). Na początku mogłoby to być wysyłanie zwykłego ciągu znaków, jak np: "Cześć Zybo" i "Cześć telefon" czy coś podobnego. Próby podłączenia Znalazłem podobny przykład w intrnecie (tutaj -> link autorstwa osoby o nicku: ralphjy). Próbowałem odtworzyć projekt, który opisał w tym artykule jednak nie udało mi się to. Poniżej zamieszczam swój block diagram, który jest podobny do tego który prezentuje ralphjy. Dołączam jeszcze constraints mojego projektu. Niestety nie wiem jak dokładnie powinny być one podpięte. Na końcu problemu zamieszczam link do constraint dla Zybo. Oczywiście próbowałem wygenerować bitstreama, ale bezskutecznie :(. Może ktoś z Was miał już do czynienia z modułem Pmod BLE i byłby w stanie pomóc :)? Btw. dzięki wielkie za jakiekolwiek wskazówki! Sprzęt Zybo Z7-10 -> link Pmod BLE -> link Software Zybo-Z7 Constraints -> link pliki źródłowe Pmod BLE-> link
Cześć, chciałbym prosić o pomoc w kwestii podpięcia modułu Pmod BLE do płytki Zybo Z7-10. Opis projektu Chciałbym podłączyć Pmod BLE do płytki Zybo Z7-10. Chciałbym by testowa aplikacja mogła wysyłać i odbierać dane po bluetooth (do testowania chciałbym użyć jakiejś aplikacji z AppStore). Na początku mogłoby to być wysyłanie zwykłego ciągu znaków, jak np: "Cześć Zybo" i "Cześć telefon" czy coś podobnego. Próby podłączenia Znalazłem podobny przykład w intrnecie (tutaj -> link autorstwa osoby o nicku: ralphjy). Próbowałem odtworzyć projekt, który opisał w tym artykule jednak nie udało mi się to. Poniżej zamieszczam swój block diagram, który jest podobny do tego który prezentuje ralphjy. Dołączam jeszcze constraints mojego projektu. Niestety nie wiem jak dokładnie powinny być one podpięte. Na końcu problemu zamieszczam link do constraint dla Zybo. Oczywiście próbowałem wygenerować bitstreama, ale bezskutecznie :(. Może ktoś z Was miał już do czynienia z modułem Pmod BLE i byłby w stanie pomóc :)? Btw. dzięki wielkie za jakiekolwiek wskazówki! Sprzęt Zybo Z7-10 -> link Pmod BLE -> link Software Zybo-Z7 Constraints -> link pliki źródłowe Pmod BLE-> link



-
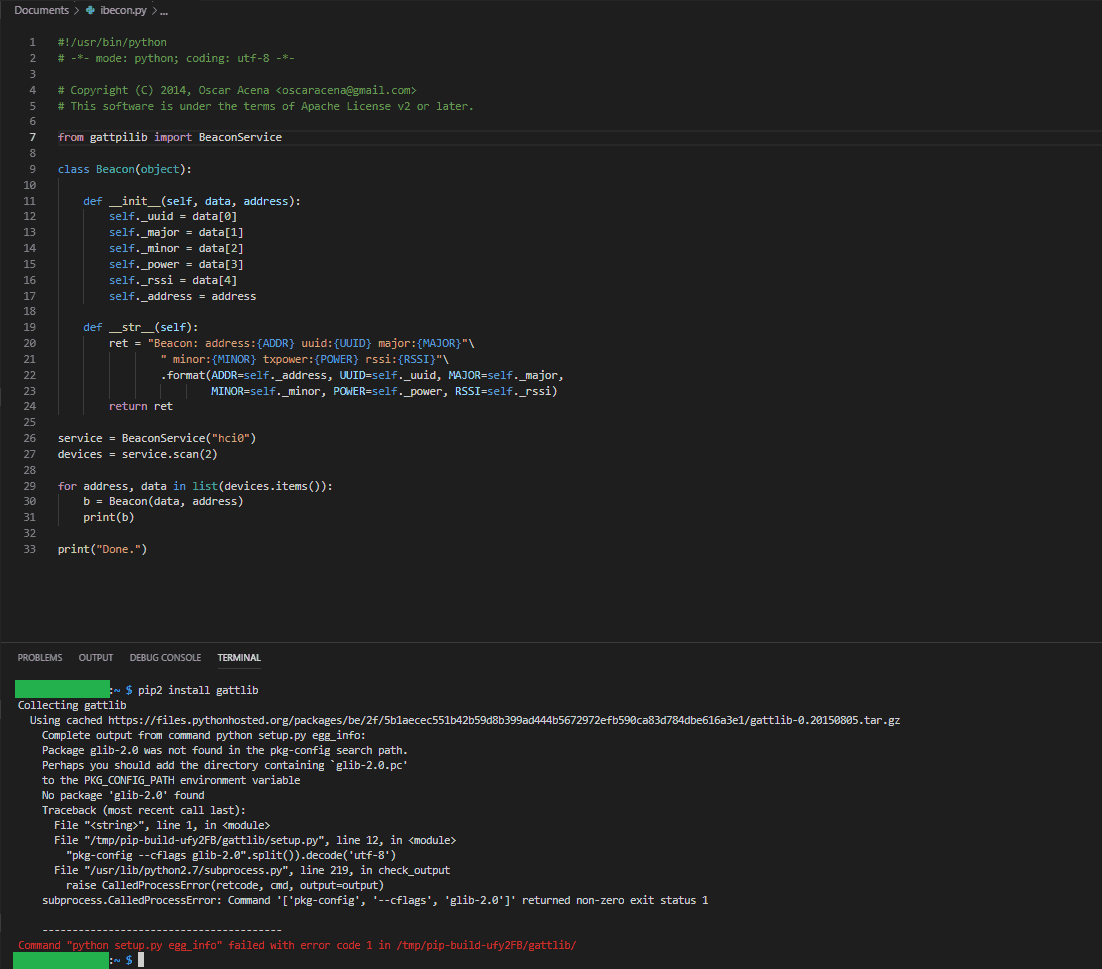
Cześć wszystkim, Chciałbym przetestować pewien program który znalazłem na internecie, niestety pojawia się problem przy instalacji biblioteki na Raspberry Pi , czy ktoś jest w stanie pomóc?
-
Cześć! Skończyłem budowę mojego pierwszego robota. Jest to też mój pierwszy większy projekt, więc proszę o wyrozumiałość, komentarze, porady mile widziane. Z racji tego, że posiadam jeszcze dwa komplety lego, postanowiłem je wykorzystać do budowy pojazdu. Początkowo miały być silniki lego, ale stwierdziłem, że lepiej będzie zrobić to na zwykłych, uniwersalnych częściach. Konstrukcja miała być mała, zwinna, sterowana przez WIFI. Przednia oś, jak widać, sterowana za pomocą micro serwa. Nie było większych oporów, serwo bez problemów sobie radziło ze sterowaniem. Zacząłem szukać jakiegoś ciekawego i małego silnika DC. Postanowiłem wybrać silnik z podwójnym wałem. Kolejnym zadaniem było przebudowanie konstrukcji tak, żeby silnik się zmieścił i nie wadził w poruszaniu się robota. Z racji tego, że wolałem zaoszczędzić kilkanaście złotych na przejściówkę lego-wał, rozwierciłem otwory w częściach które miałem. Zacząłem myśleć jak wyglądałoby połączenie iPhone - ESP, ale w międzyczasie na uczelni dziekan zapowiedział nam dodatkowy projekt na zajęciach z mikrokontrolerów ( pierwsze takie zajęcia na drugim roku studiów ) - dowolny robot na platformie Arduino lub STM. Chłopaki na Facebookowej grupie Arduino uświadomili mi, że nie ma sensu robić projektu na ESP, bo musiałbym się łączyć tylko przez sieć i lepszym wyborem byłby bluetooth. Tak też się stało, zakupiłem moduł HM-10, który współpracuje z używanym przeze mnie iOS. Do tego całość przeniosłem na klona płytki Arduino. Jako aplikacji sterującej użyłem ArduinoBlue, wraz z biblioteką. Inne aplikacje nie chciały działać. W dodatku albo na iOS nie ma żadnych popularnych aplikacji do sterowania przez BLE albo nie udało mi się znaleźć. Możecie polecić ciekawe aplikacje na iOS, na pewno sprawdzę! Można zauważyć, że na breadbordzie zainstalowałem jakąś płytkę. Jest to sterownik silników DC, polecany, łatwy w użyciu. Dobra, silnik jest, działa, serwo jest, łączność przez BLE również. Wypadało by odpiąć wszystko od zasilania z gniazdka i zastosować akumulatory, baterie. Z początku była to dla mnie czarna magia, większe napięcie, jakieś ampery, przetwornice. Czytałem różne artykuły, oglądałem poradniki, pytałem na Facebookowej grupie. Ostatecznie, zgodnie z zasadami: Arduino + sekcja logiczna zasilana z powerbanka + wyprowadzenie zasilania bezpośrednio do serwa, silnik DC zasilany przez dwa ogniwa litowo-jonowe połączone szeregowo z BMS, napięcie zmniejszane przez przetwornicę Żeby szybko podpinać ogniwa do robota albo ładować, przylutowałem wtyki/gniazda DC 5.5mm. BTW. Bardzo długo męczyłem się z lutowaniem ogniw na 30-watowej lutownicy kolbowej. Metodą prób i błędów wszystko się złączyło. Przed podłączeniem każdego elementu lutowanego, sprawdzałem miernikiem czy nie ma zwarcia! Dodatkowo pokusiłem się o popularny czujnik odległości oraz mała prowizorka - dwie diody z opornikami schowane w obudowie po serwie (spaliło się), informujące o przeszkodzie w danej odległości. Wersja finalna, kilkukrotnie większa i cięższa niż pierwotna wersja. Wzmocniony układ kierowniczy. Jeździ, skręca, hamuje, cofa. Trzymany pod kocem Wszelkie komentarze mile widziane! A tutaj krótki filmik (musiałem zdemontować czujnik odległości, ponieważ powodował zakłócenia całego układu: Tak wygląda sterowanie za pomocą joysticka: