Przeszukaj forum
Pokazywanie wyników dla tagów 'regulator'.
Znaleziono 2 wyniki
-
 Robot unikający przeszkód z regulacją napędu silników prądu stałego Cześć! Ponad rok temu skonstruowałem w ramach przedmiotu na studiach robota unikającego przeszkody. Po czasie pomyślałem, że konstrukcją warto podzielić się na Forbocie. Zakres projektu Robot porusza się na dwóch kołach i omija przeszkody wykrywane za pomocą czujnika ultradźwiękowego. Dużo pracy włożono w sterowanie silnikami prądu stałego, które stanowią napęd robota. Mimo że zakres zachowań platformy nie jet zbyt szeroki, to wartość projektu leży w algorytmach teorii sterowania, które skonstruowano by zwiększyć precyzję ruchów. W zakres prac projektowych weszły: projekt platformy robota i jej wykonanie w technologii druku 3D (Fusion 360), projekt układu drukowanego z mikroprocesorem Atmega32u4, mostkiem H oraz paroma innymi peryferiami (Autodesk Eagle), oprogramowanie robota pozwalające na wykrywanie i omijanie przeszkód (biblioteki i bootlader Arduino), konstrukcja pętli sprzężenia zwrotnego dla silników oparta na użyciu enkoderów szczelinowych, algorytm regulatora PI do synchronizacji prędkości kół przy jeździe na wprost (poprawia utrzymanie kierunku jazdy), algorytm zagnieżdżonego regulatora obrotu platformy o zadany kąt (algorytm podobny jak ten stosowany w serwomechanizmach), prosta identyfikacja parametrów transmitancji użytych silników i trochę rozważań na temat możliwości strojenia regulatorów przy pomocy metody linii pierwiastkowych. W ramach zaliczenia projektu powstał dosyć długi raport, gdzie jest opisane jak zrealizowano poszczególne części projektu, dlatego nie ma chyba potrzeby przedstawiać w poście szczegółów po raz drugi. Gdyby ktoś szukał informacji o przenoszeniu swojego projektu z Arduino na własną płytkę PCB (z działającym USB na Atmedze32u4), konstrukcji systemów regulacji w praktyce, czy budowy własnych serwomechanizmów to można tam znaleźć działające przykłady. Kod projektu i dokumentację można znaleźć na GitHubie. Oczywiście projekt nie jest idealny, szczególnie że powstał już jakiś czas temu, a wraz ze zdobywaniem doświadczenia dostrzega się coraz więcej błędów. Na koniec dorzucam parę grafik i gifów, więcej można znaleźć w podlinkowanym raporcie i repozytorium. Ujęcia na robota z różnych stron Wierzchnia strona płytki PCB, spód oraz schemat elektryczny w raporcie Utrzymywanie kierunku jazdy Obrót o zadany kąt
Robot unikający przeszkód z regulacją napędu silników prądu stałego Cześć! Ponad rok temu skonstruowałem w ramach przedmiotu na studiach robota unikającego przeszkody. Po czasie pomyślałem, że konstrukcją warto podzielić się na Forbocie. Zakres projektu Robot porusza się na dwóch kołach i omija przeszkody wykrywane za pomocą czujnika ultradźwiękowego. Dużo pracy włożono w sterowanie silnikami prądu stałego, które stanowią napęd robota. Mimo że zakres zachowań platformy nie jet zbyt szeroki, to wartość projektu leży w algorytmach teorii sterowania, które skonstruowano by zwiększyć precyzję ruchów. W zakres prac projektowych weszły: projekt platformy robota i jej wykonanie w technologii druku 3D (Fusion 360), projekt układu drukowanego z mikroprocesorem Atmega32u4, mostkiem H oraz paroma innymi peryferiami (Autodesk Eagle), oprogramowanie robota pozwalające na wykrywanie i omijanie przeszkód (biblioteki i bootlader Arduino), konstrukcja pętli sprzężenia zwrotnego dla silników oparta na użyciu enkoderów szczelinowych, algorytm regulatora PI do synchronizacji prędkości kół przy jeździe na wprost (poprawia utrzymanie kierunku jazdy), algorytm zagnieżdżonego regulatora obrotu platformy o zadany kąt (algorytm podobny jak ten stosowany w serwomechanizmach), prosta identyfikacja parametrów transmitancji użytych silników i trochę rozważań na temat możliwości strojenia regulatorów przy pomocy metody linii pierwiastkowych. W ramach zaliczenia projektu powstał dosyć długi raport, gdzie jest opisane jak zrealizowano poszczególne części projektu, dlatego nie ma chyba potrzeby przedstawiać w poście szczegółów po raz drugi. Gdyby ktoś szukał informacji o przenoszeniu swojego projektu z Arduino na własną płytkę PCB (z działającym USB na Atmedze32u4), konstrukcji systemów regulacji w praktyce, czy budowy własnych serwomechanizmów to można tam znaleźć działające przykłady. Kod projektu i dokumentację można znaleźć na GitHubie. Oczywiście projekt nie jest idealny, szczególnie że powstał już jakiś czas temu, a wraz ze zdobywaniem doświadczenia dostrzega się coraz więcej błędów. Na koniec dorzucam parę grafik i gifów, więcej można znaleźć w podlinkowanym raporcie i repozytorium. Ujęcia na robota z różnych stron Wierzchnia strona płytki PCB, spód oraz schemat elektryczny w raporcie Utrzymywanie kierunku jazdy Obrót o zadany kąt




-
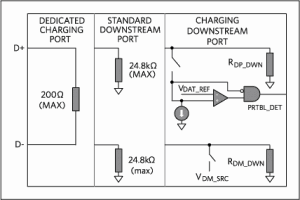
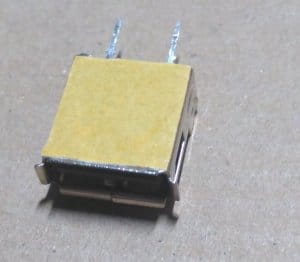
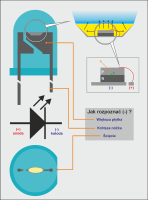
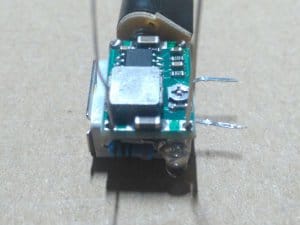
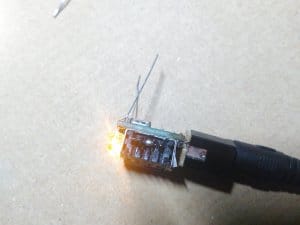
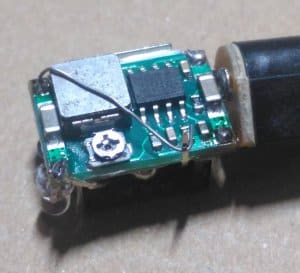
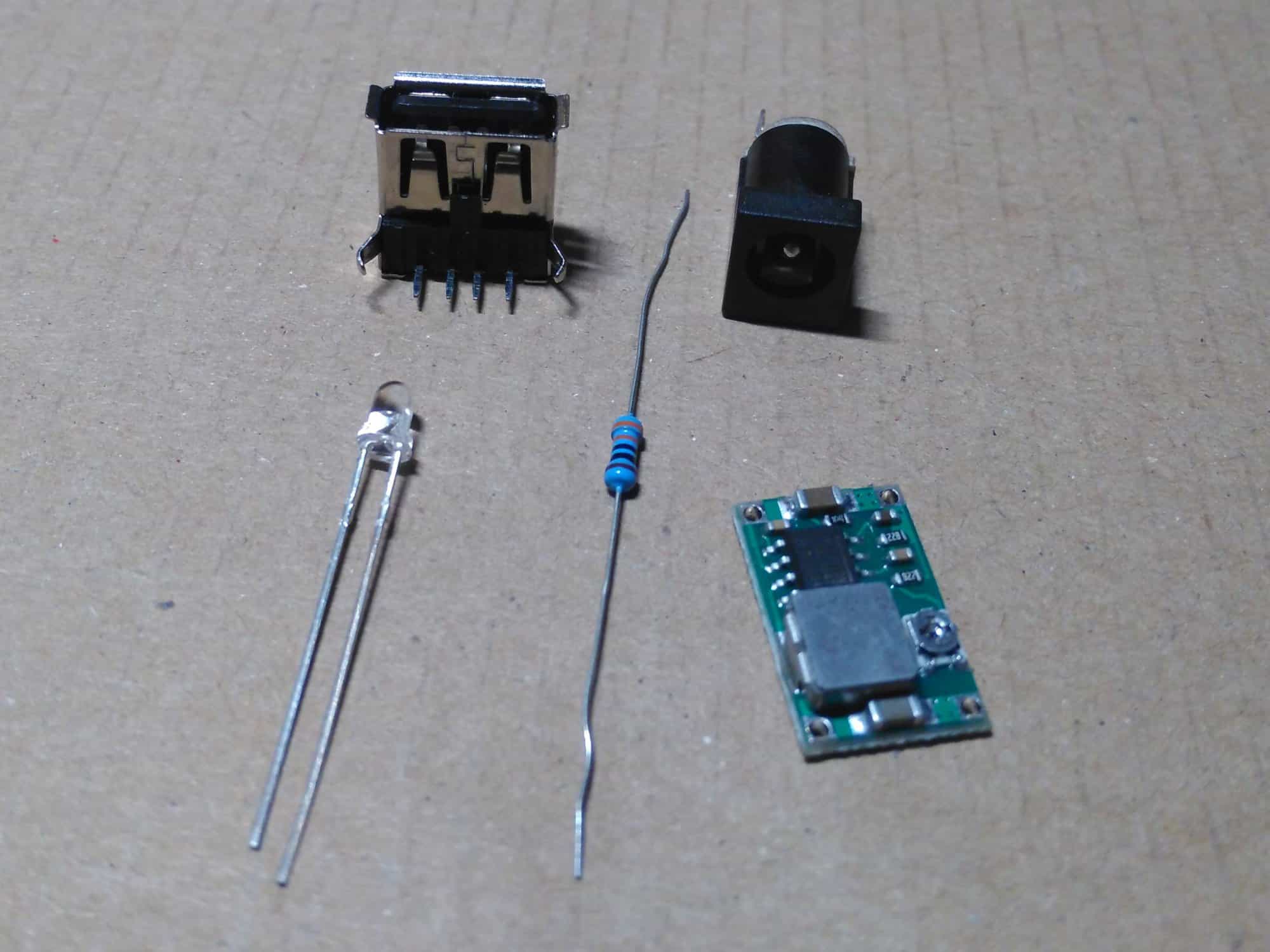
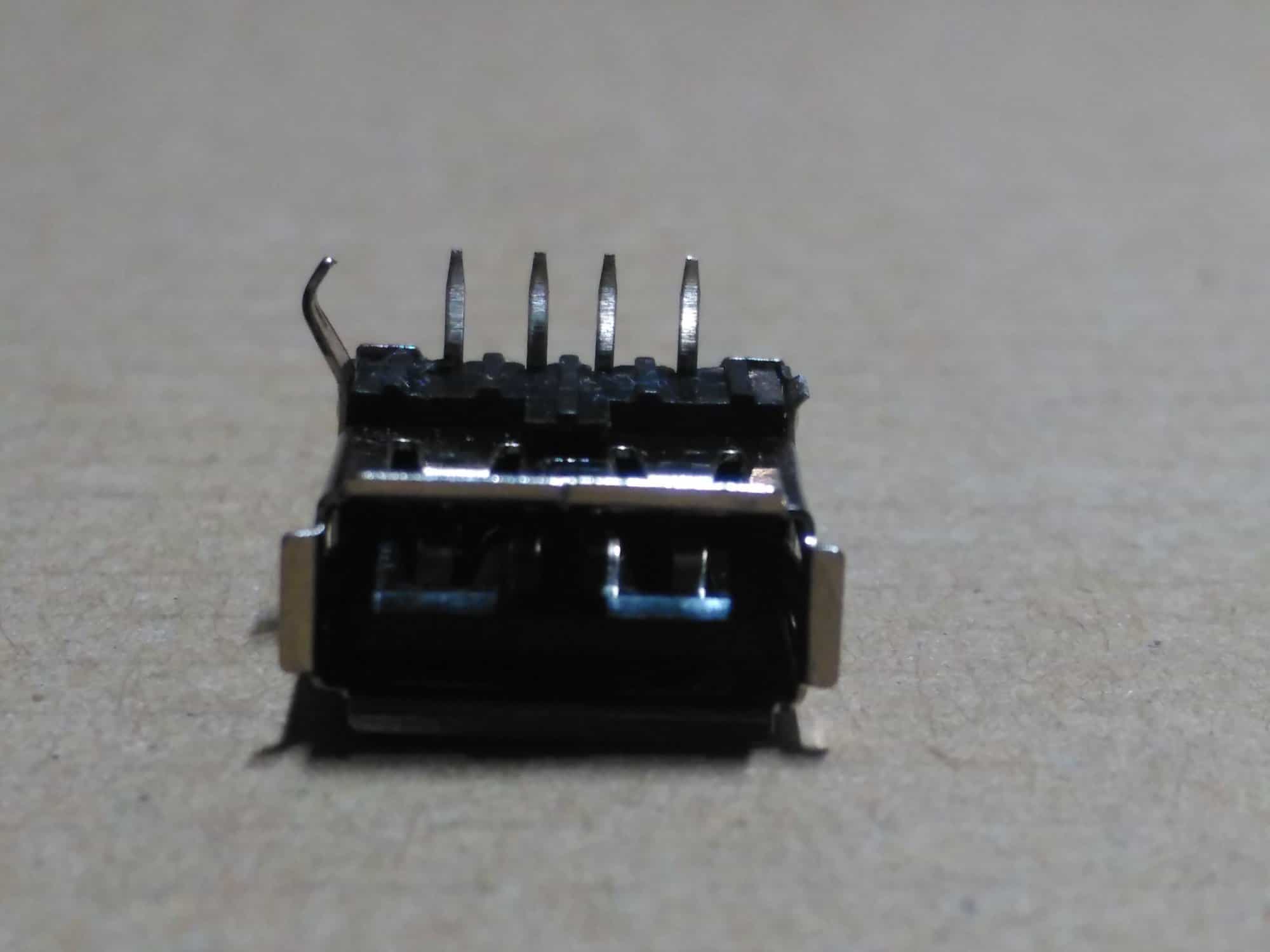
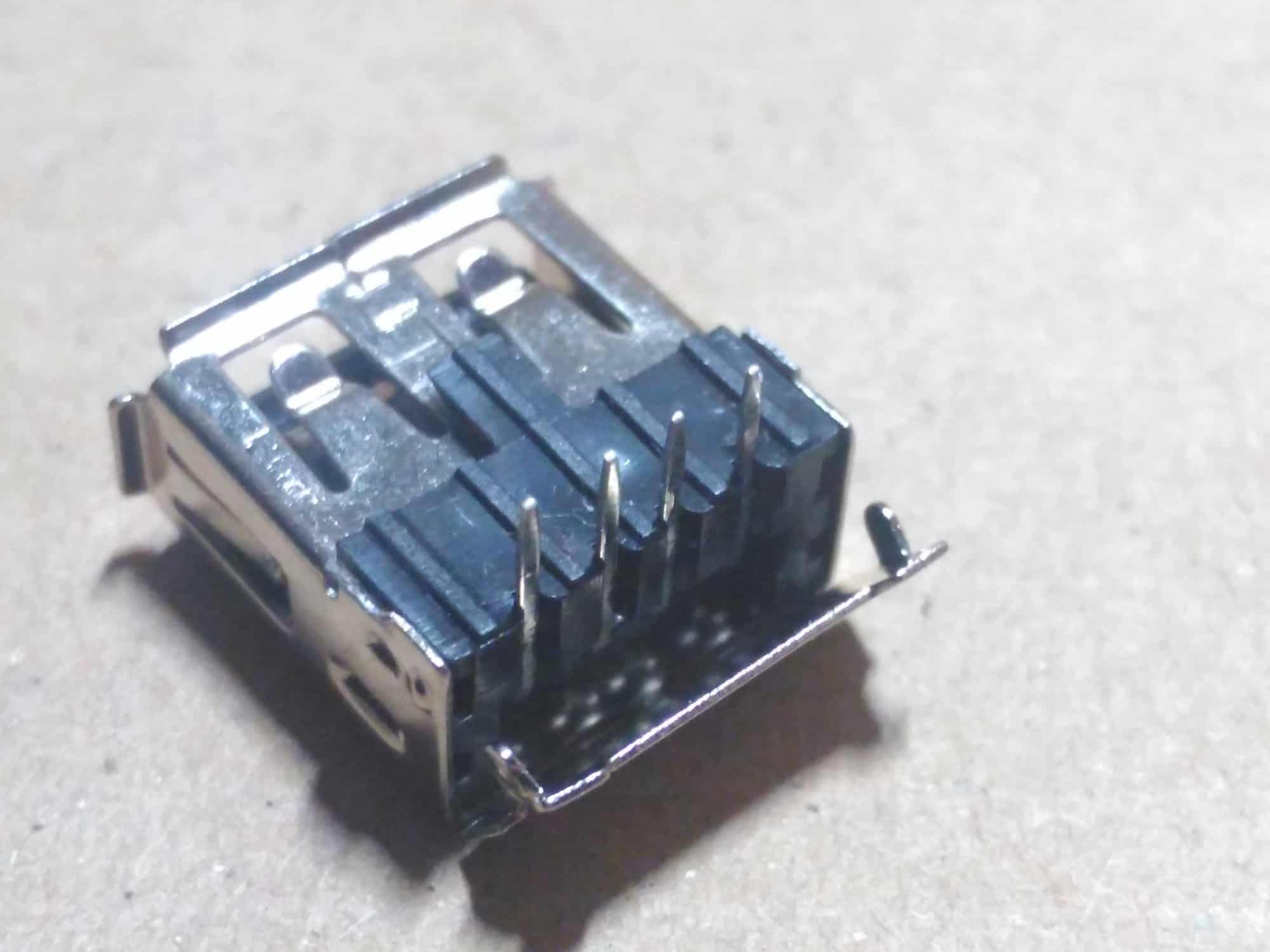
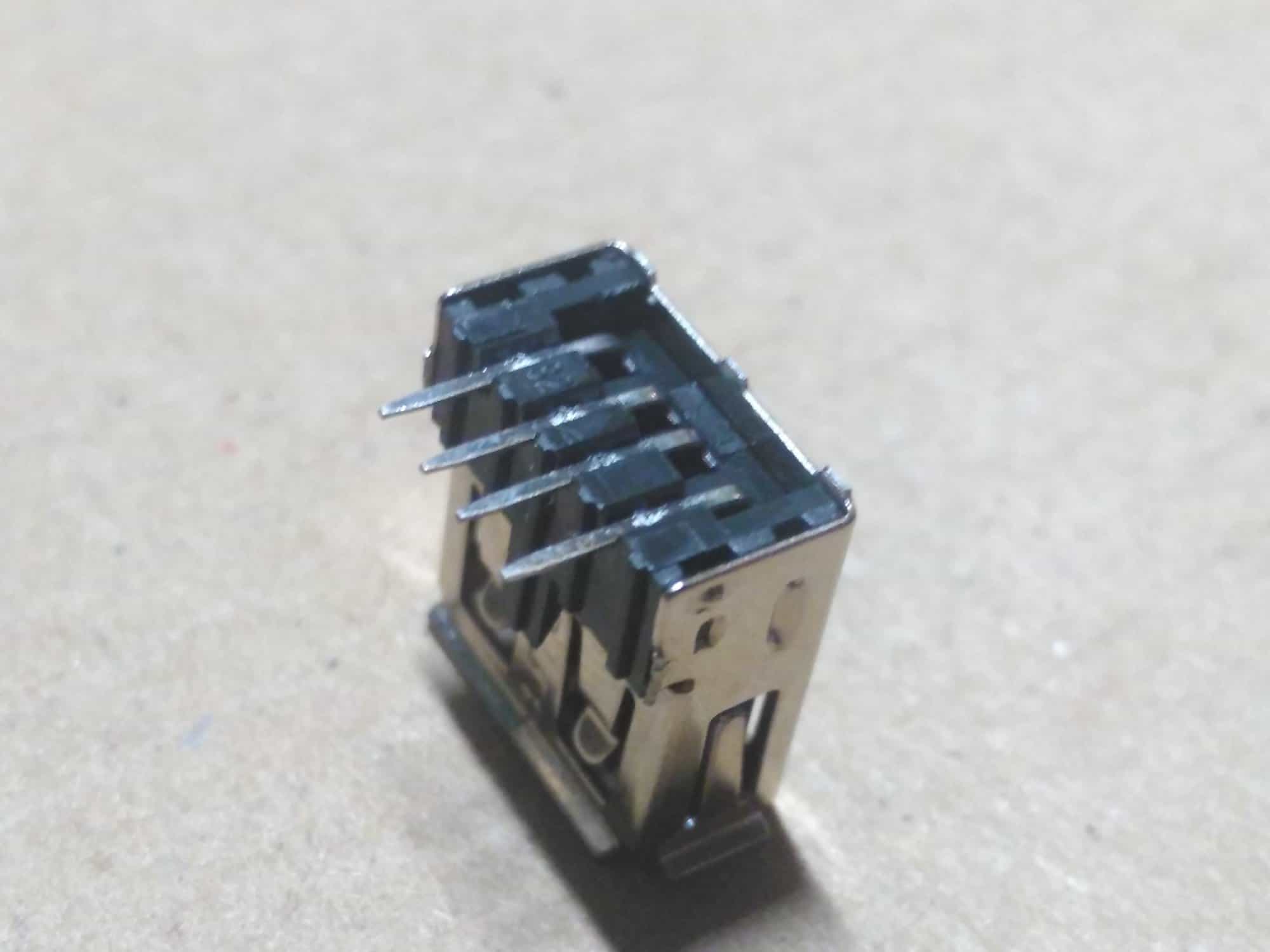
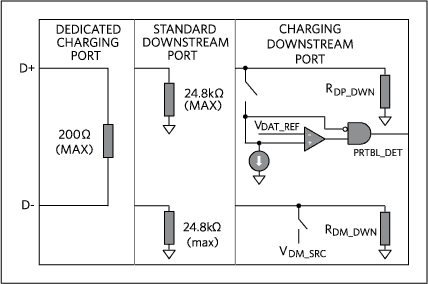
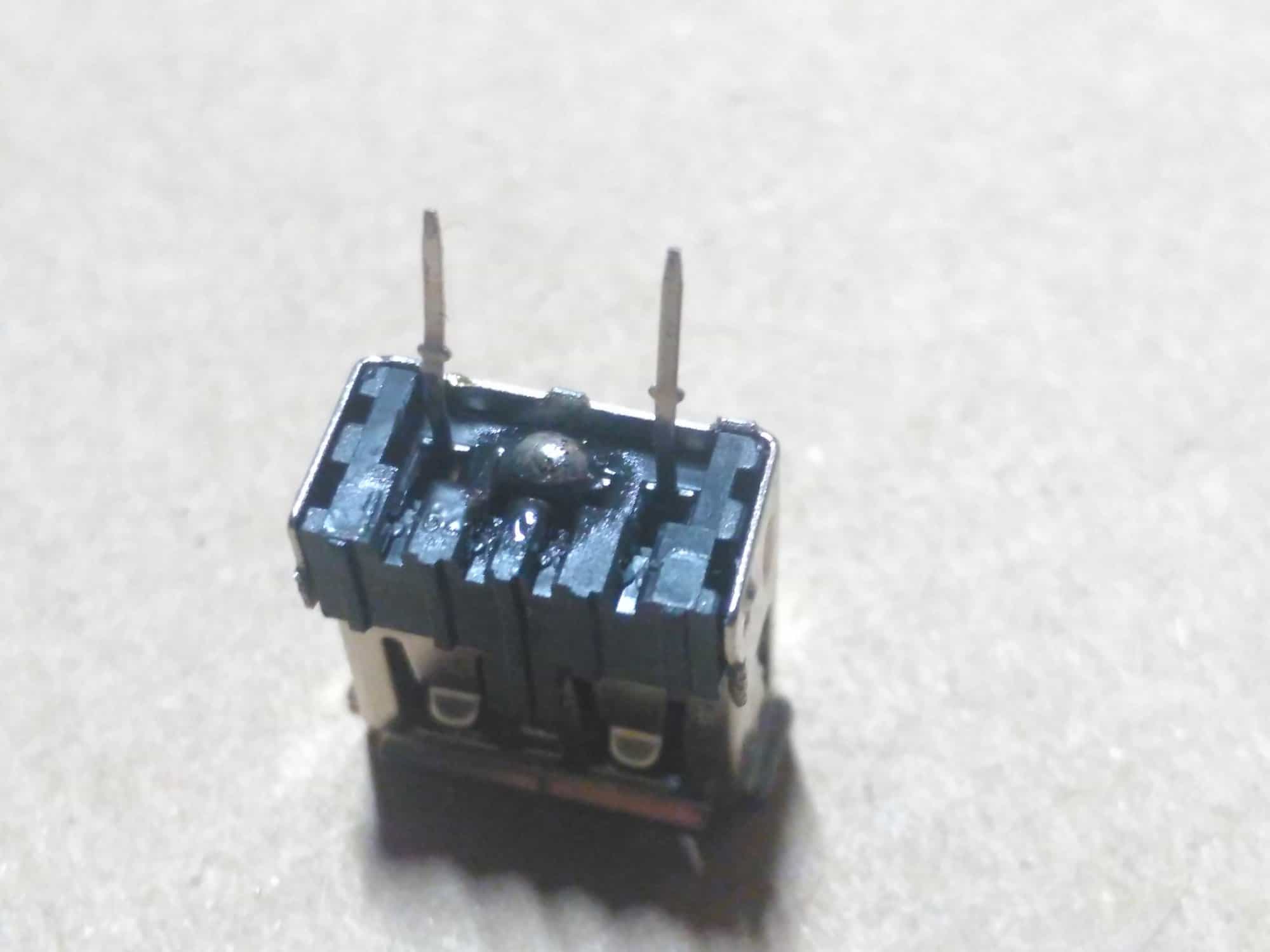
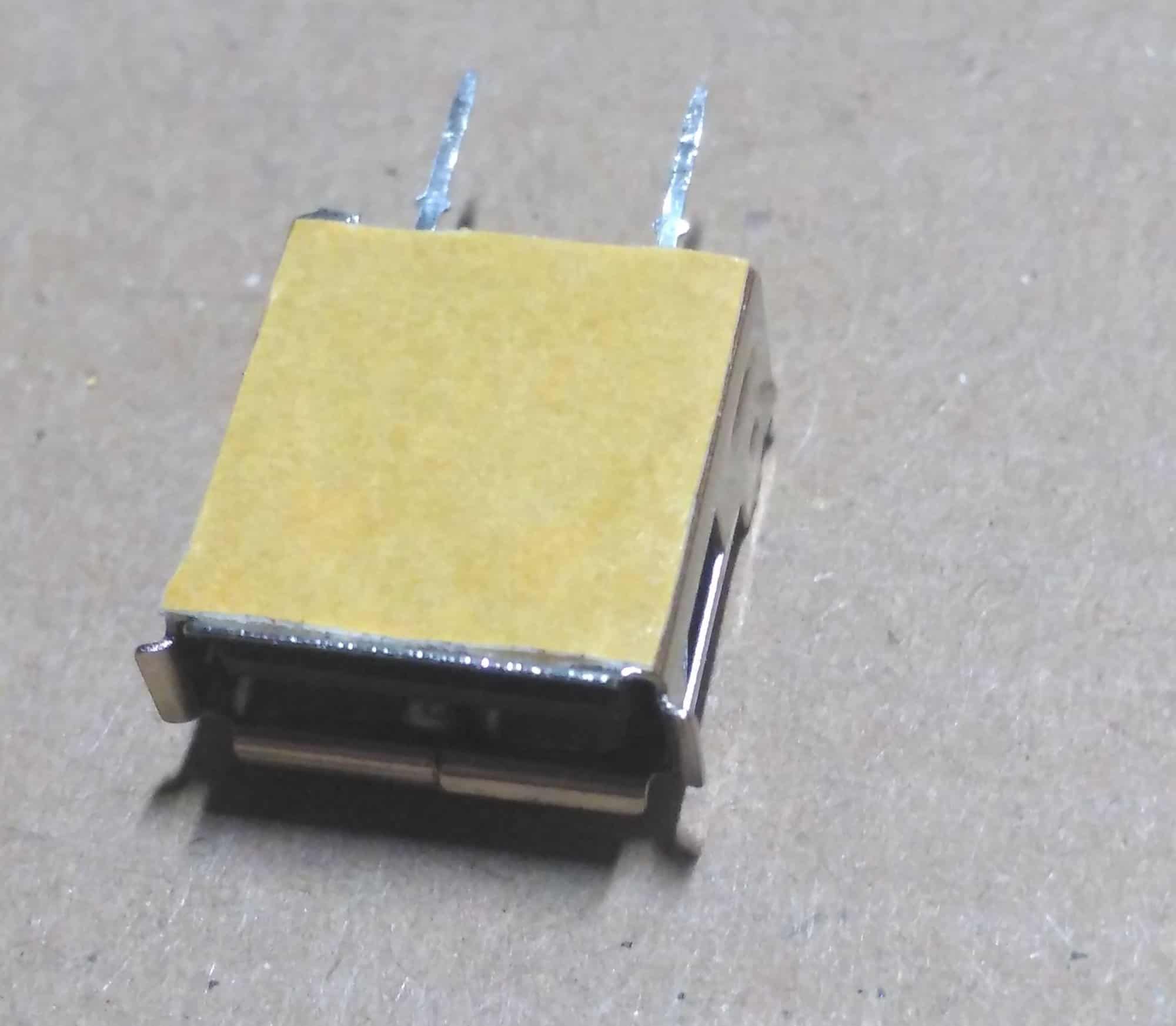
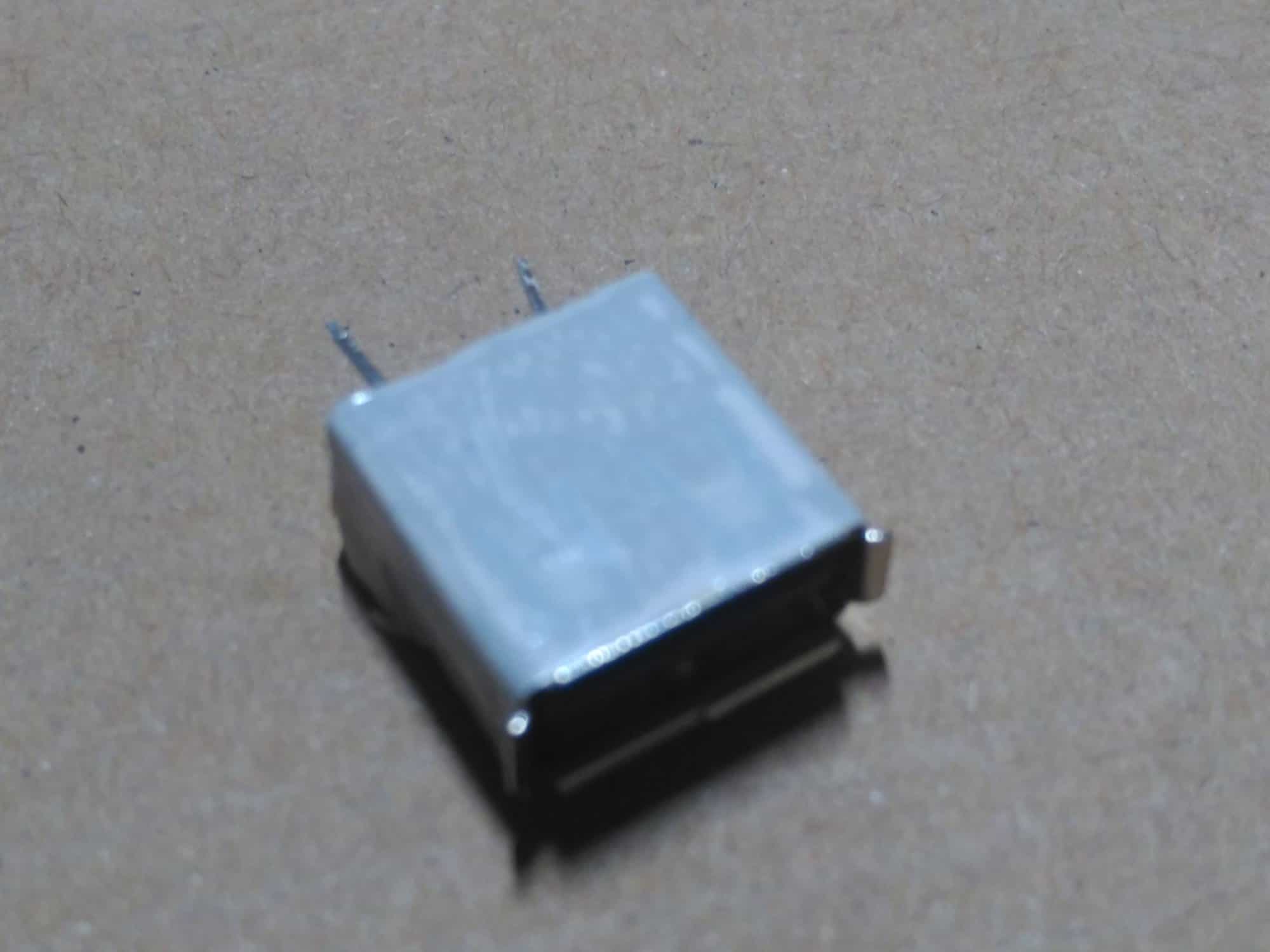
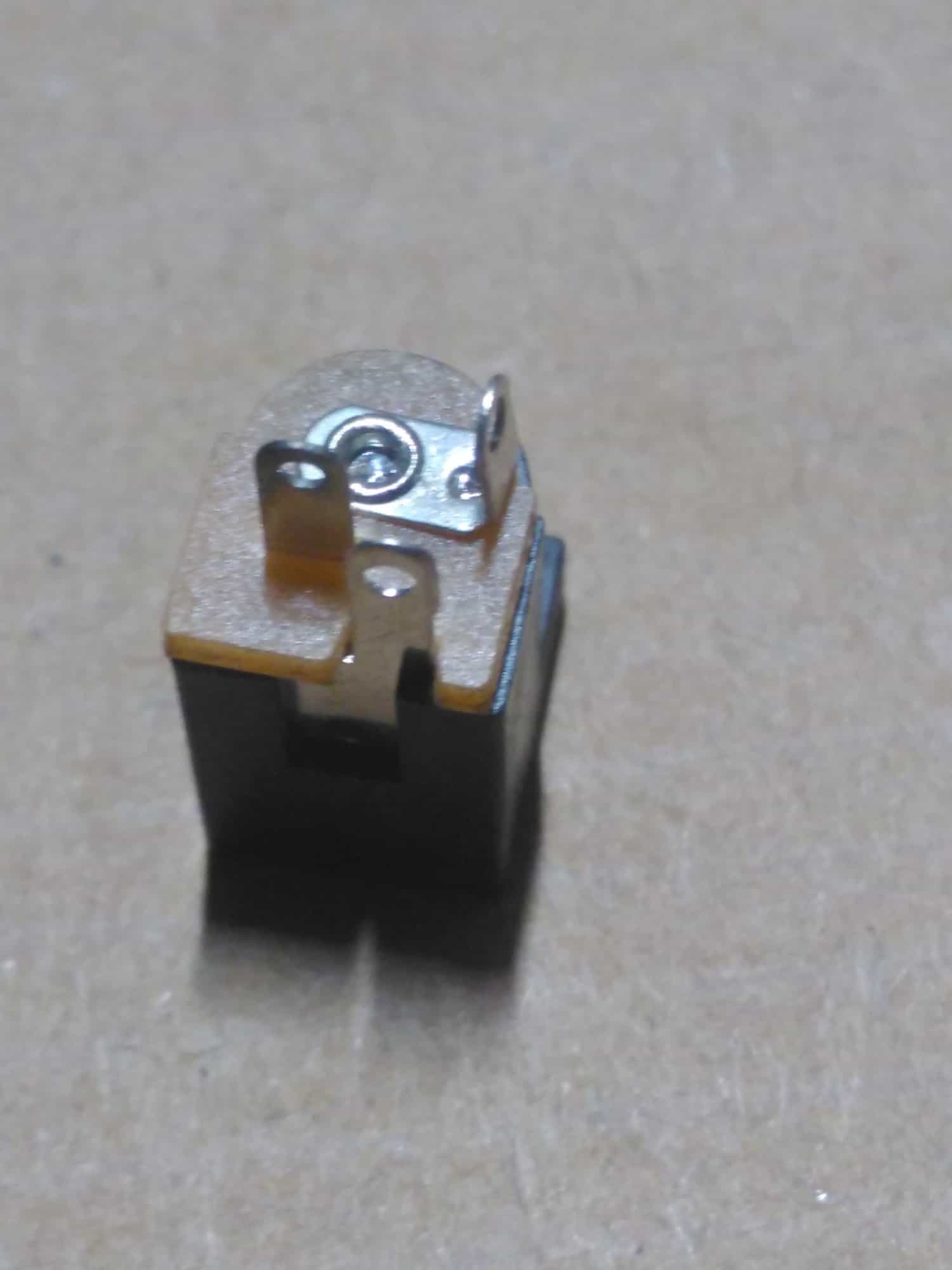
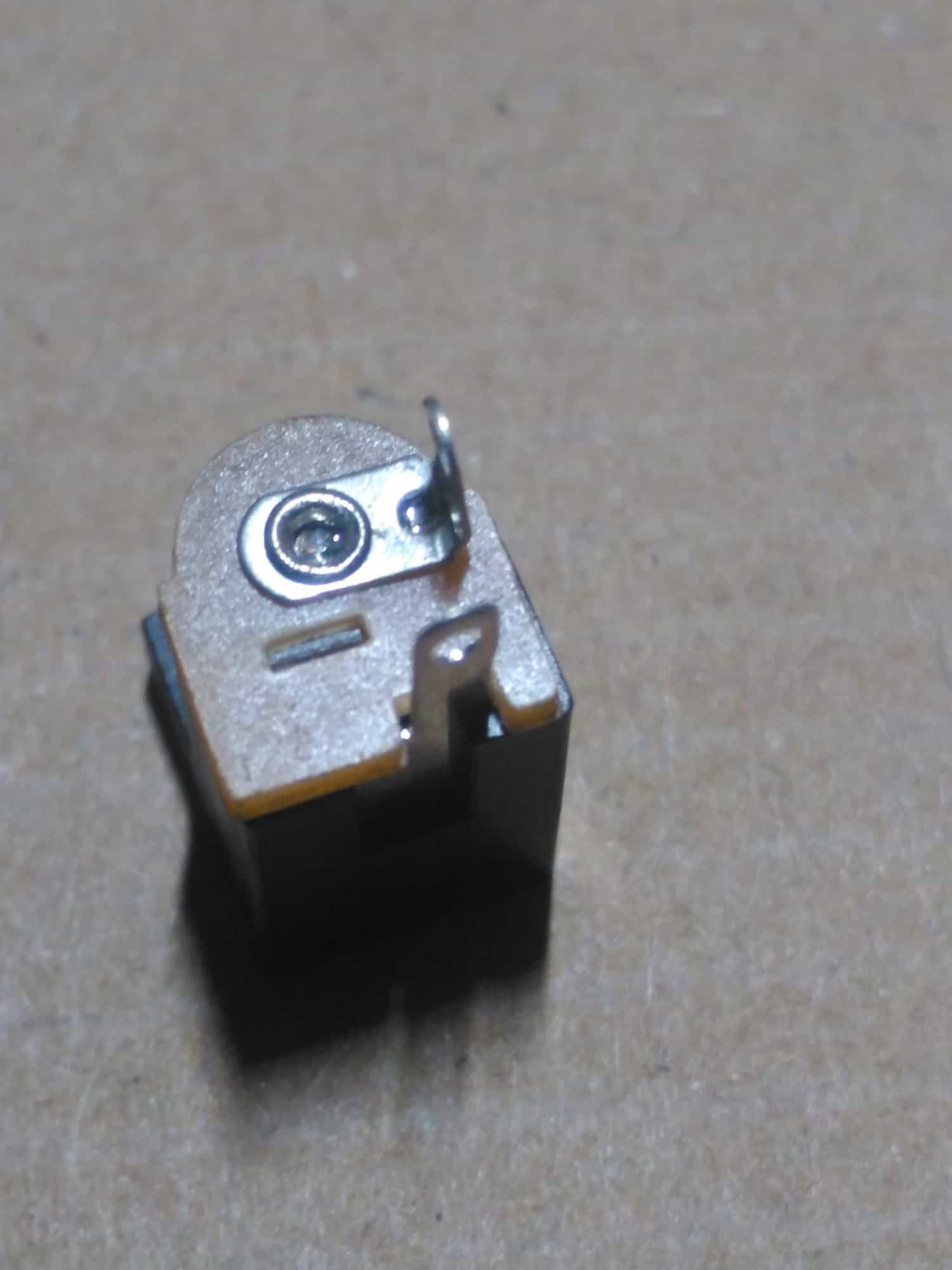
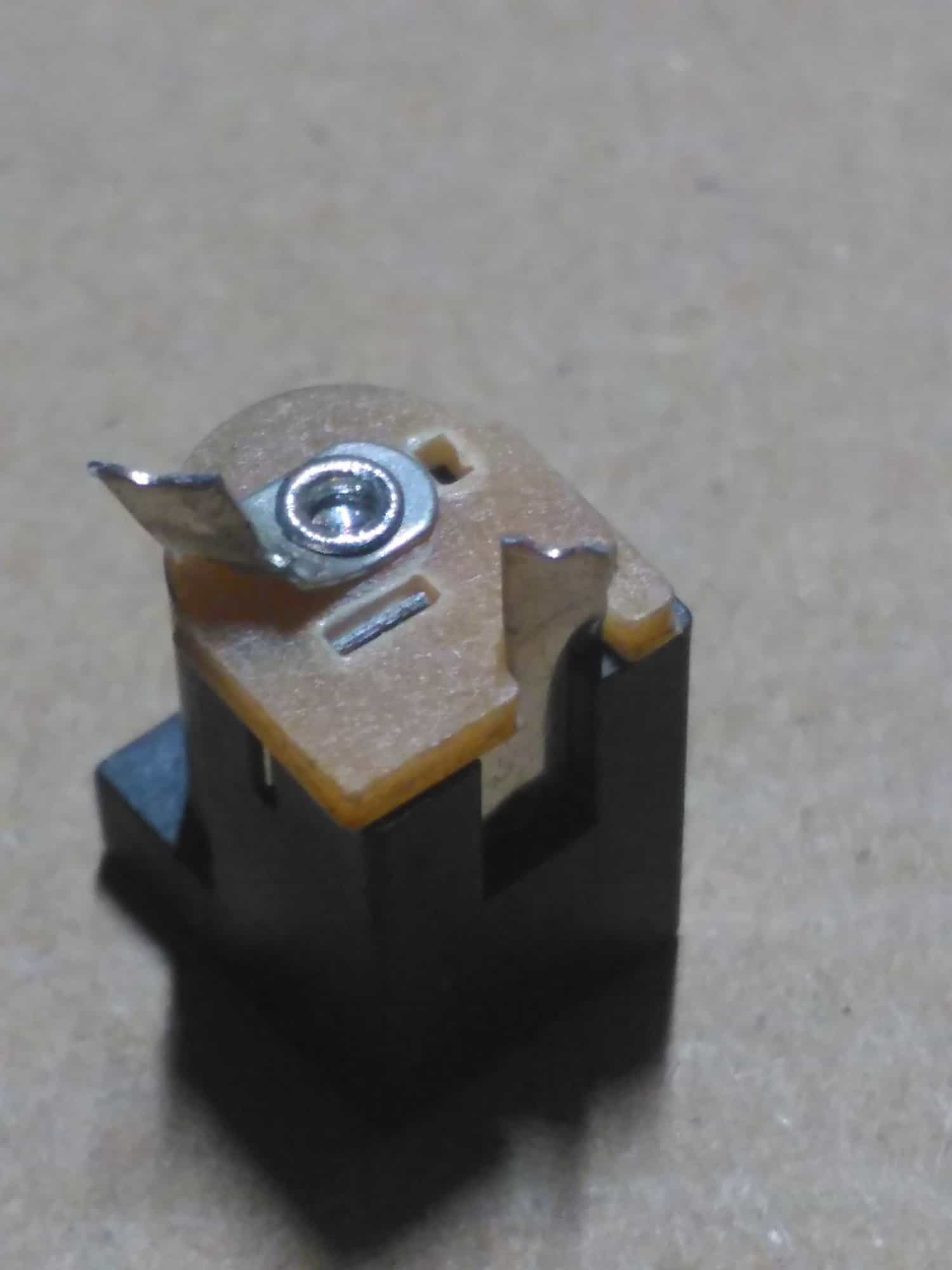
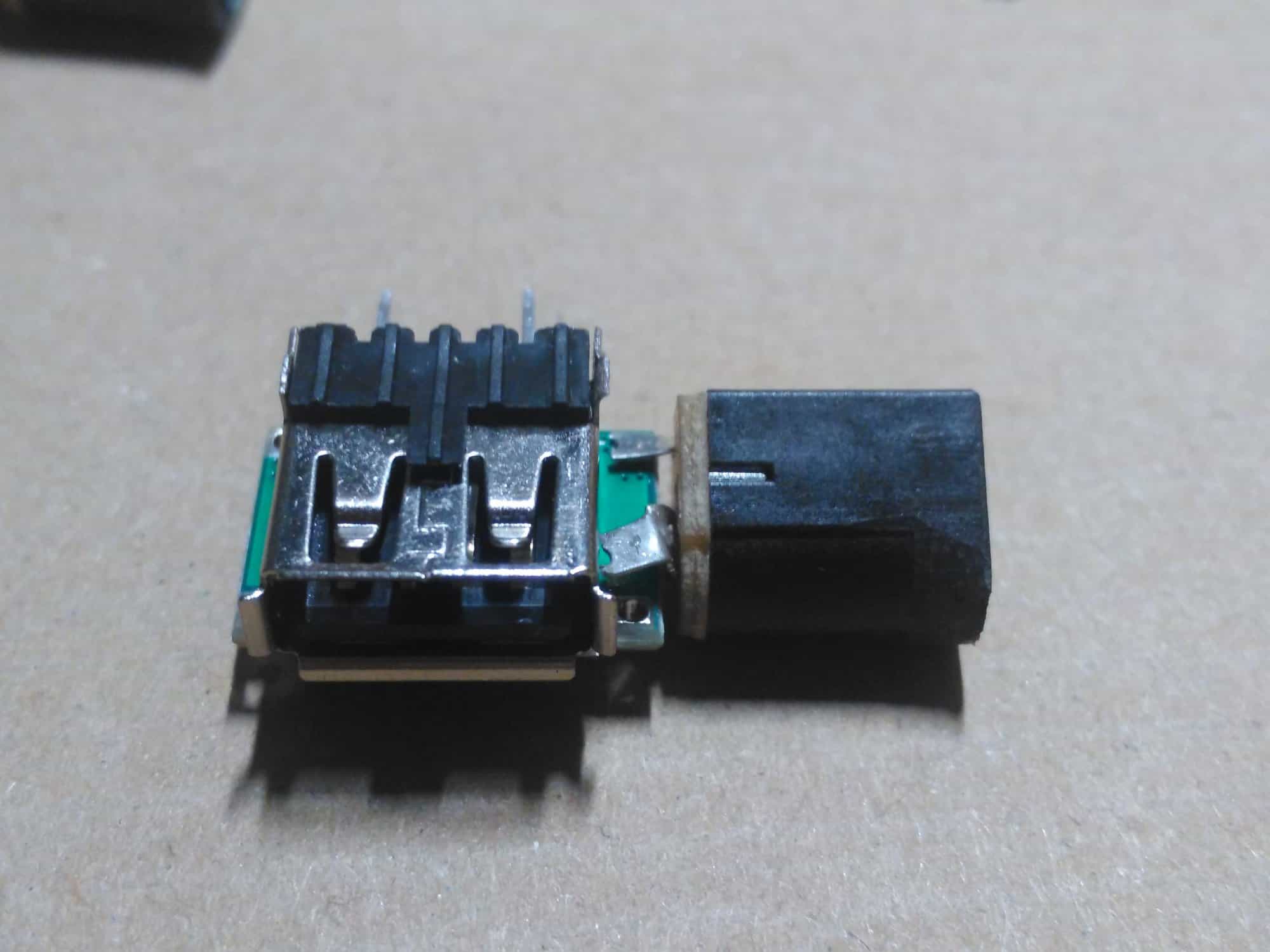
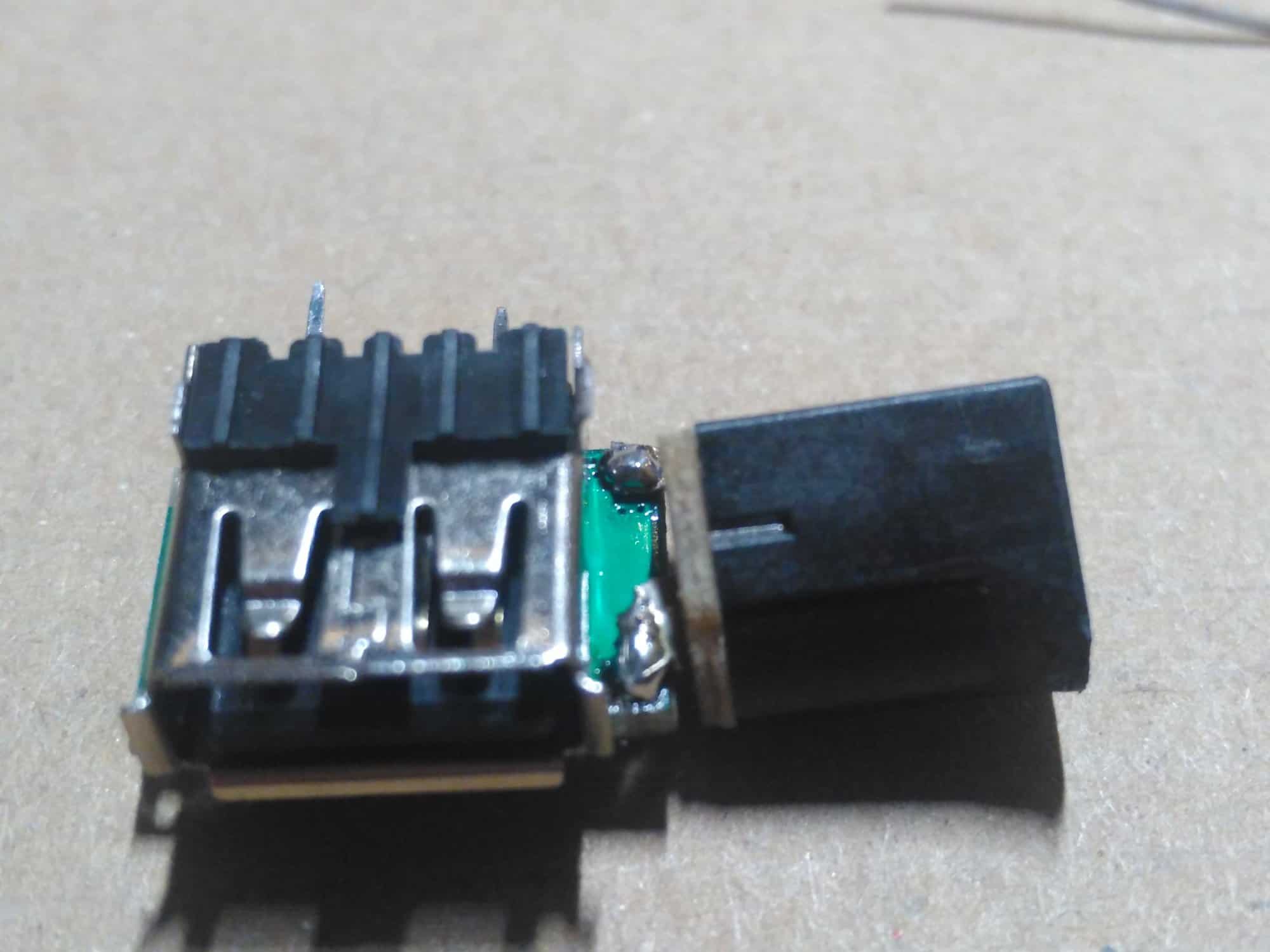
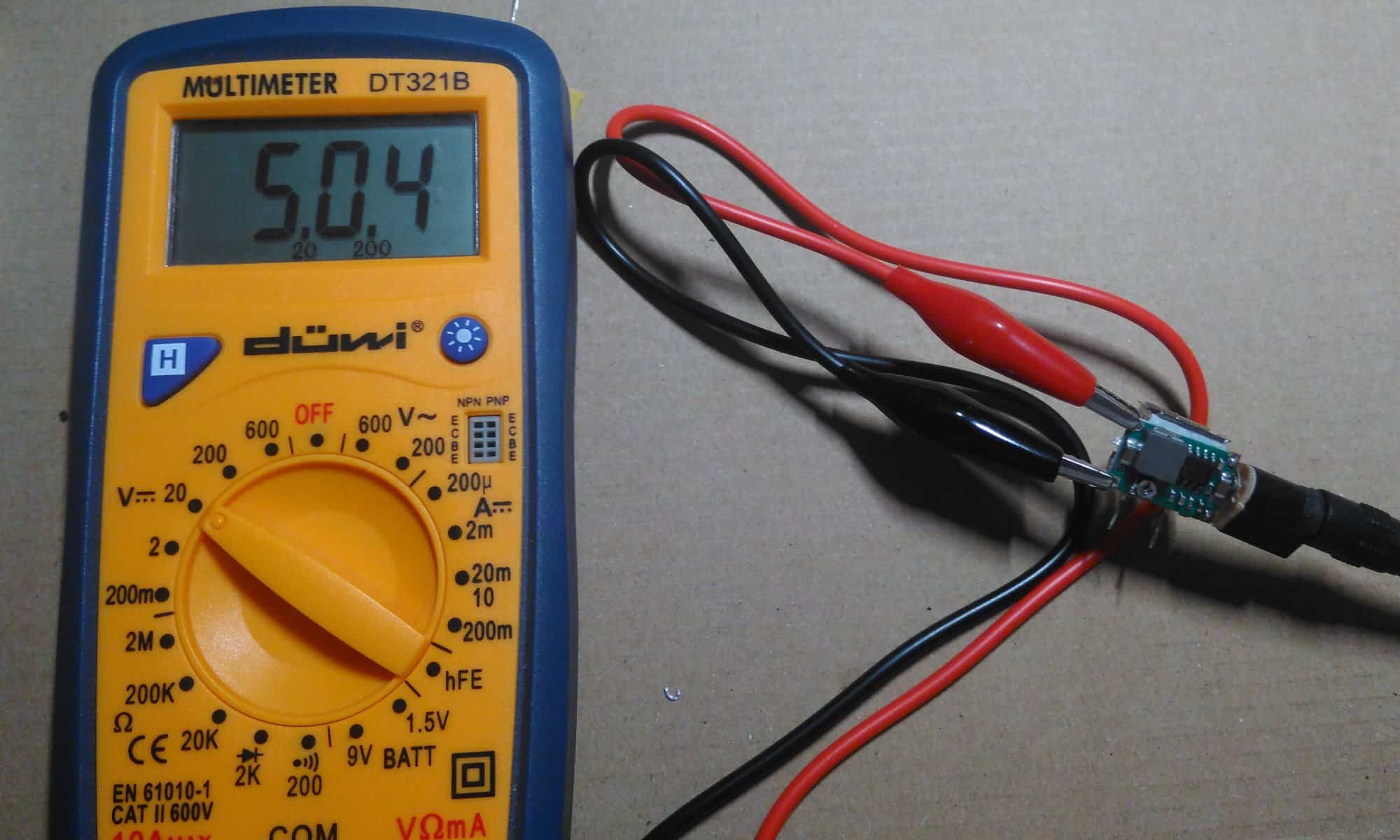
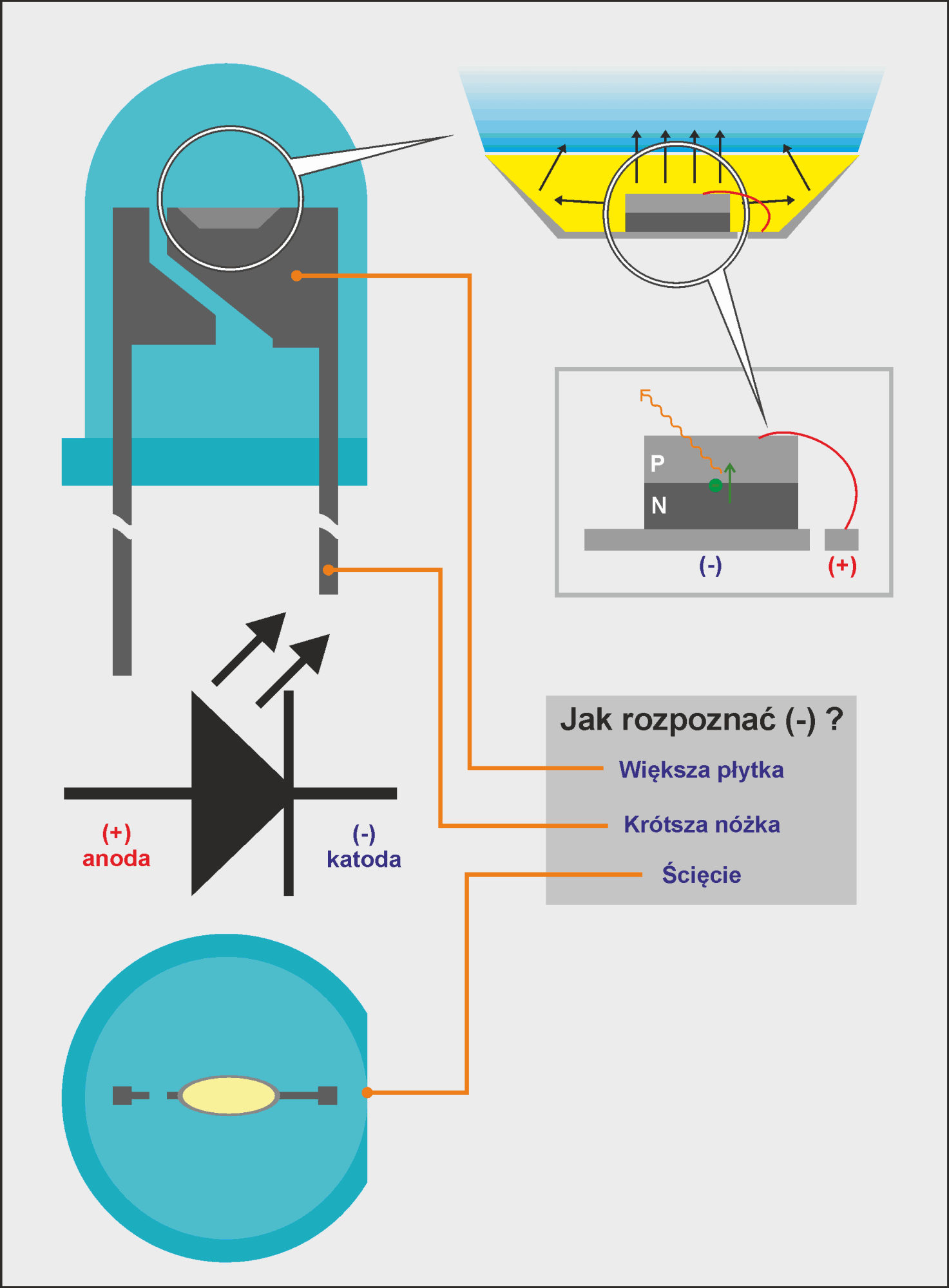
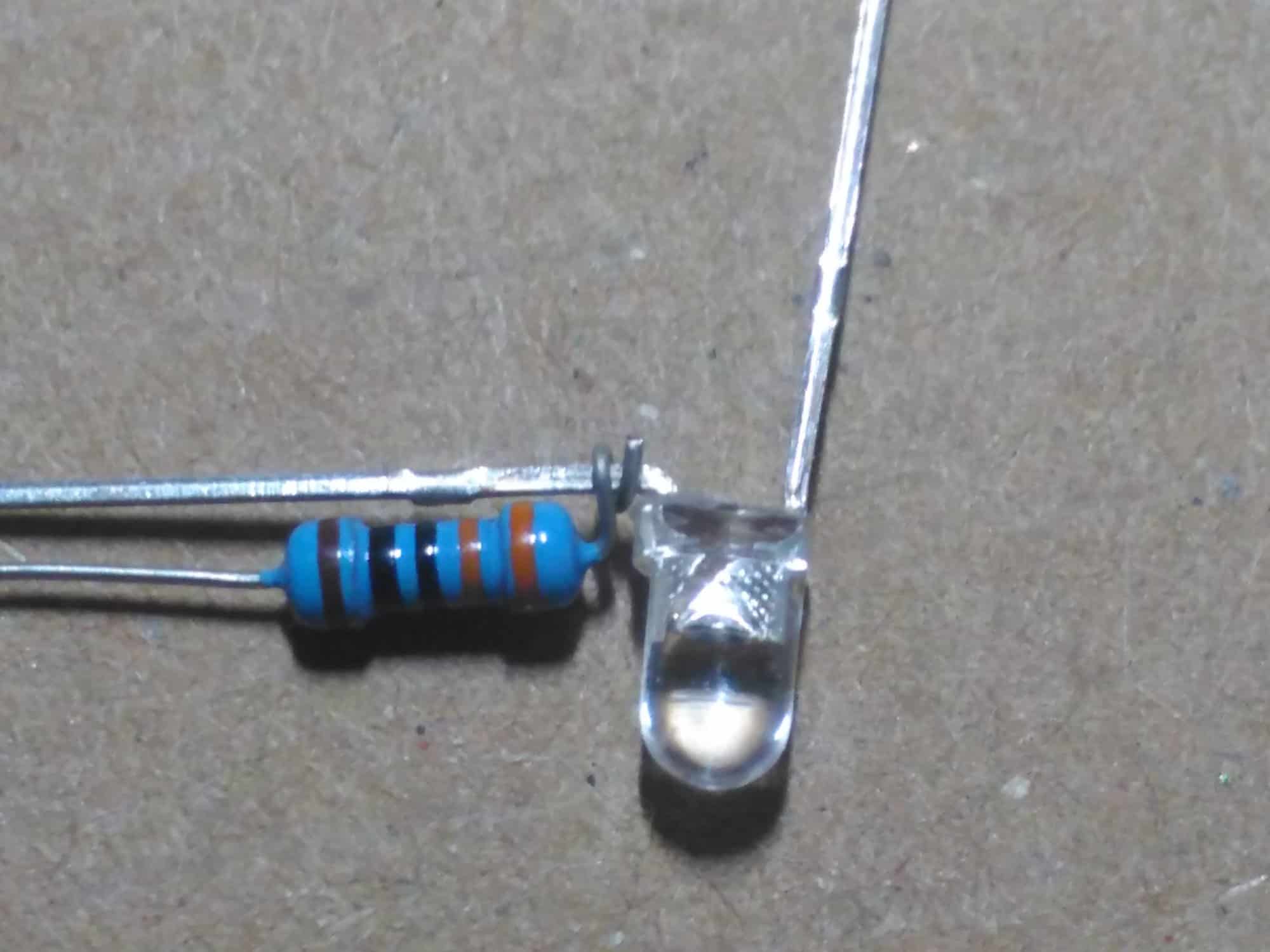
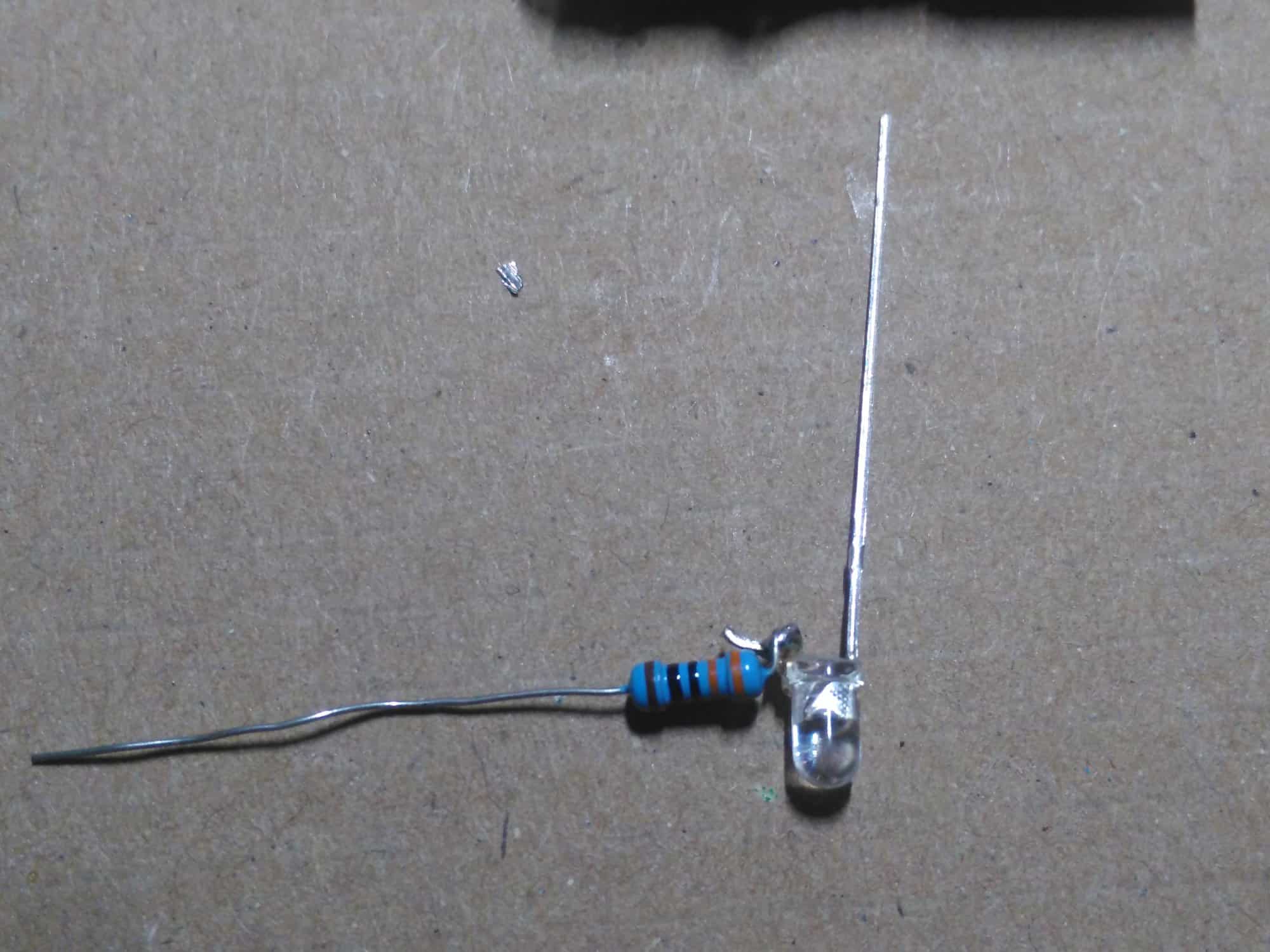
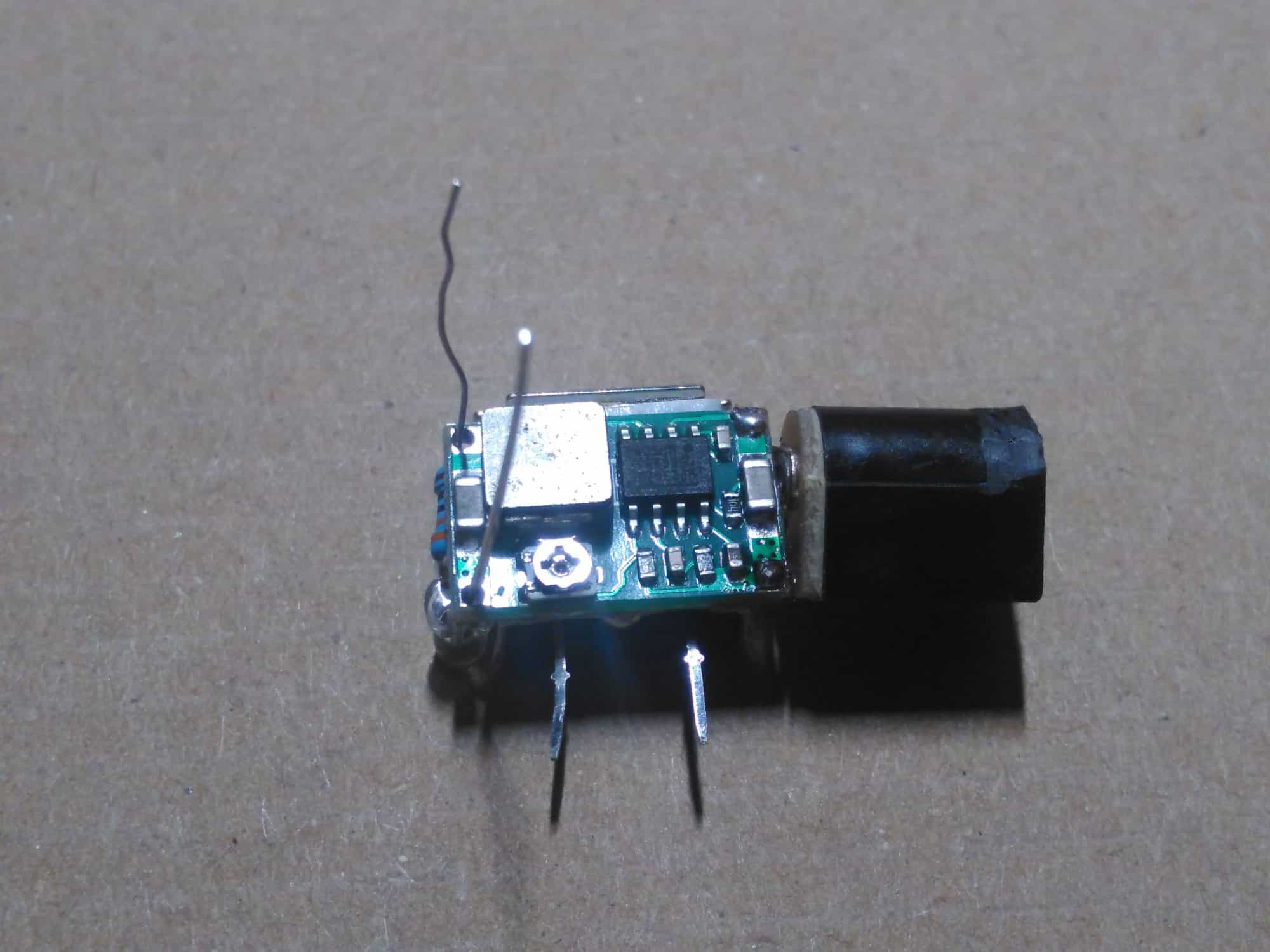
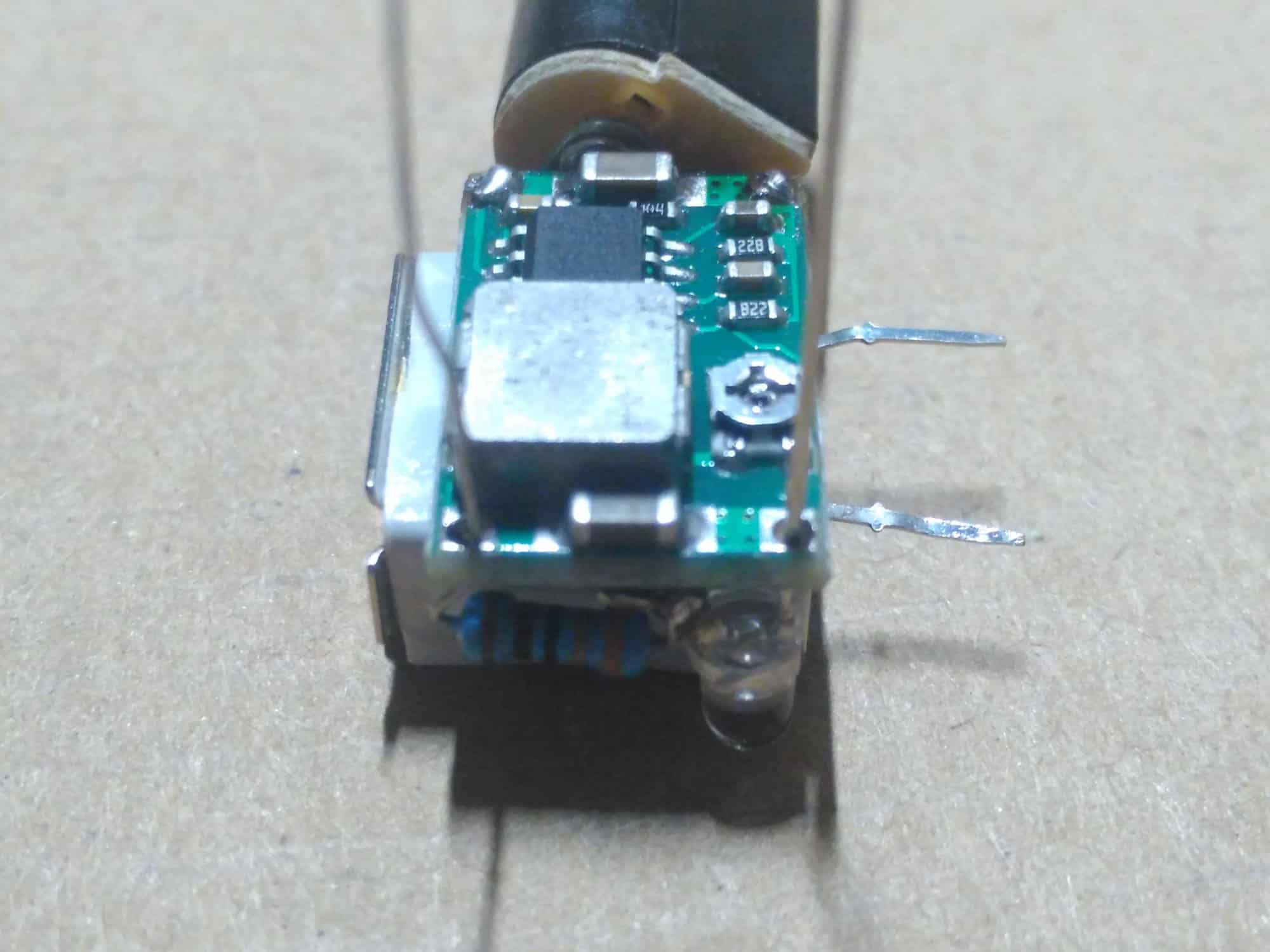
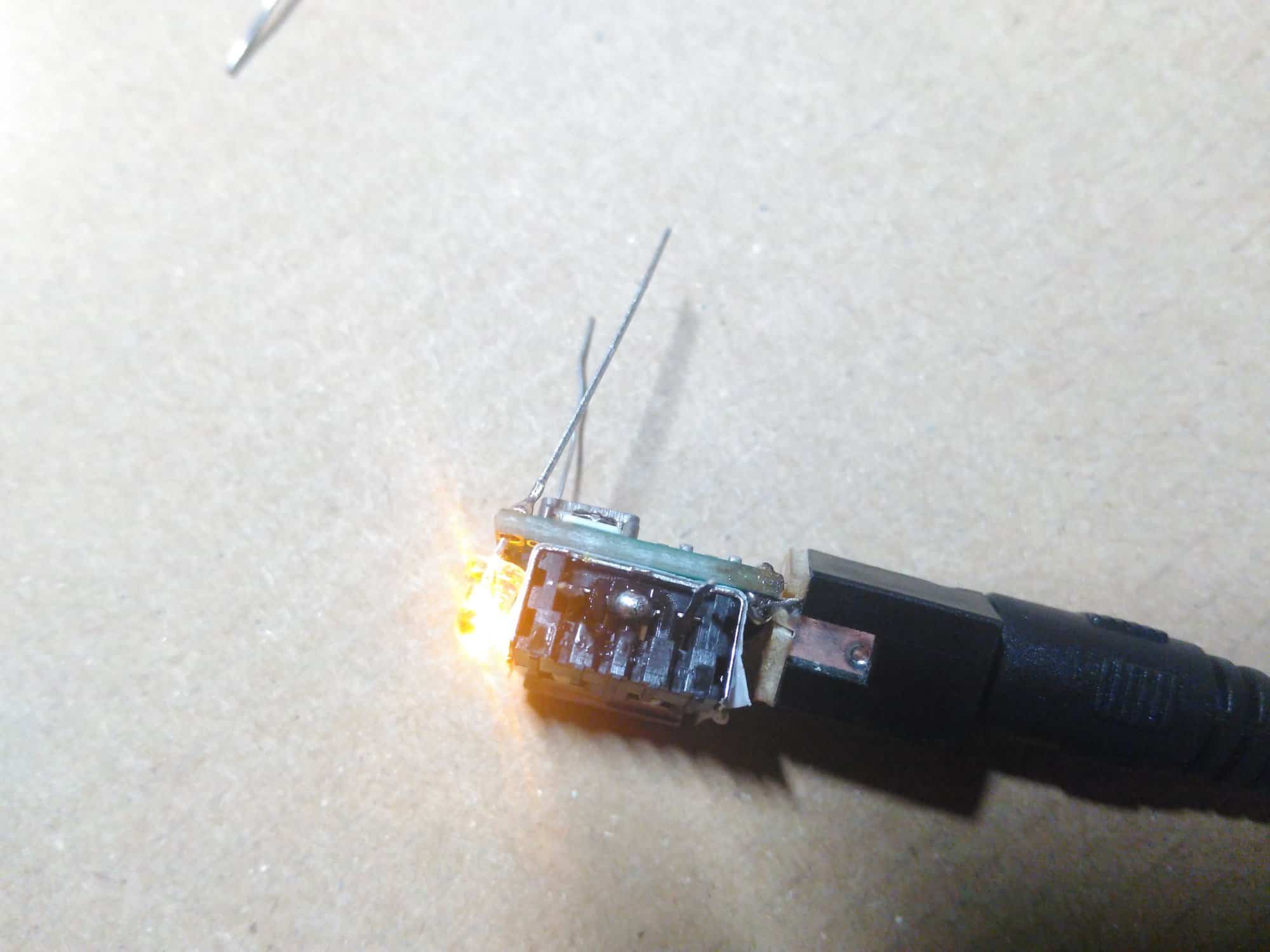
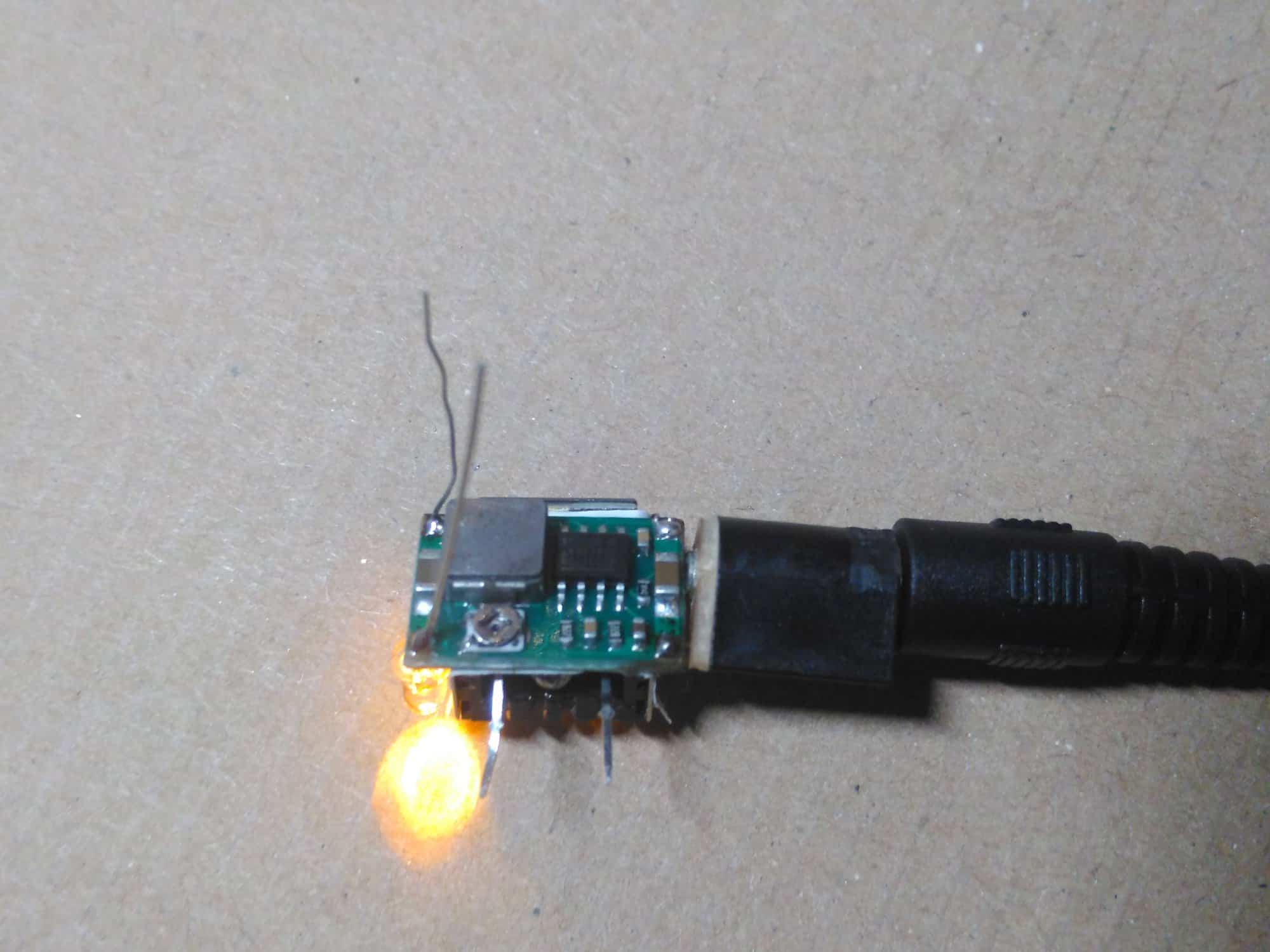
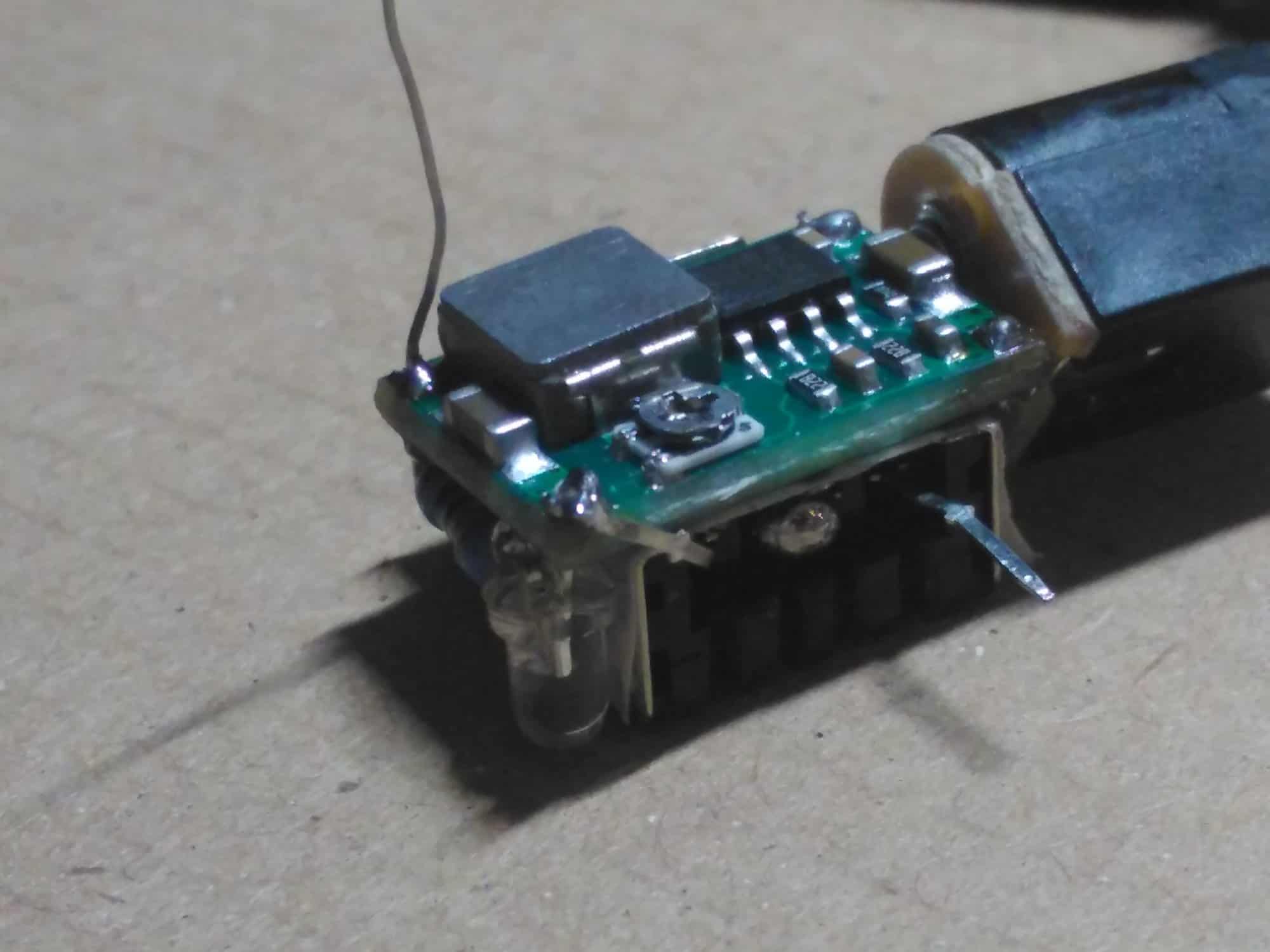
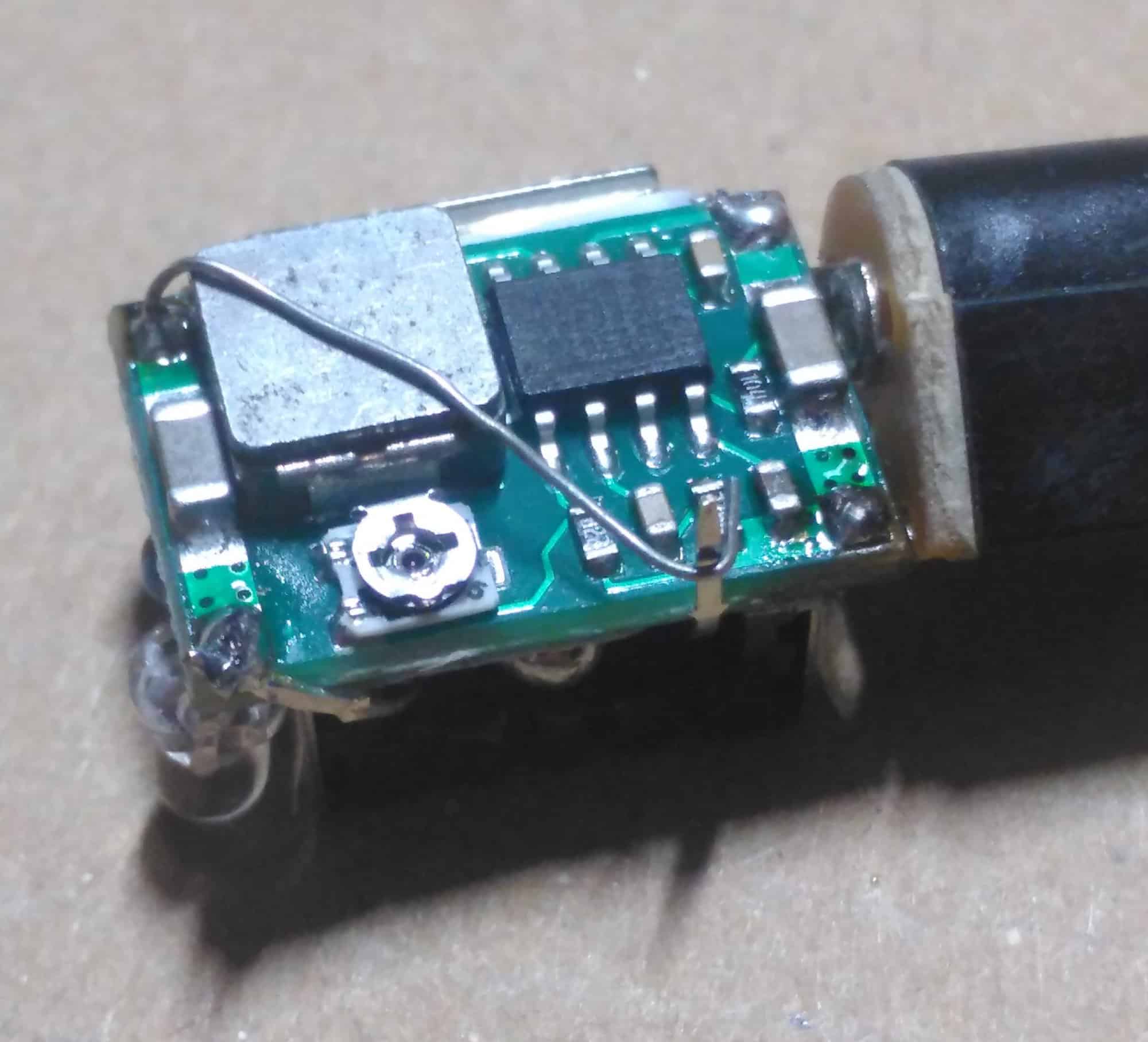
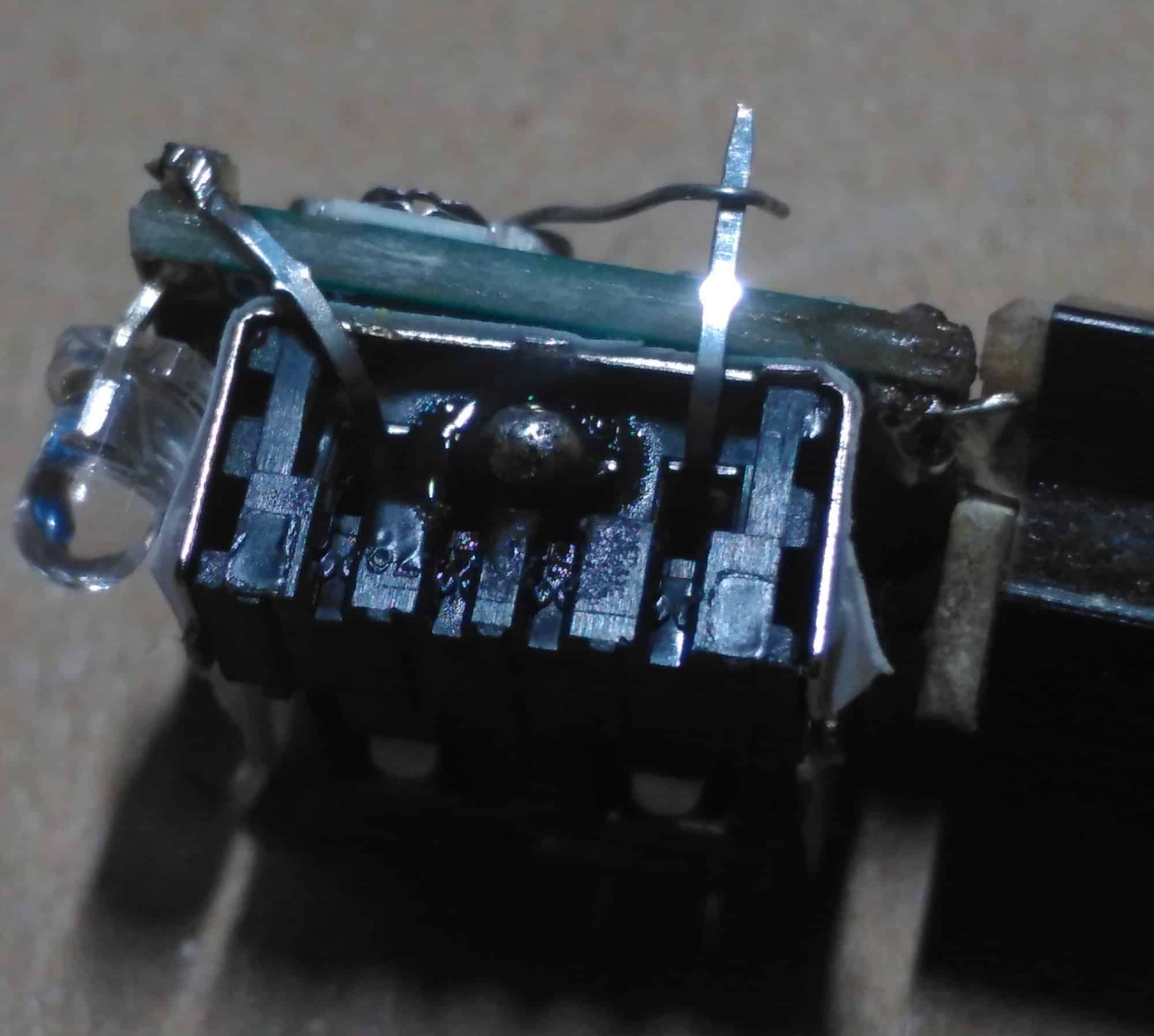
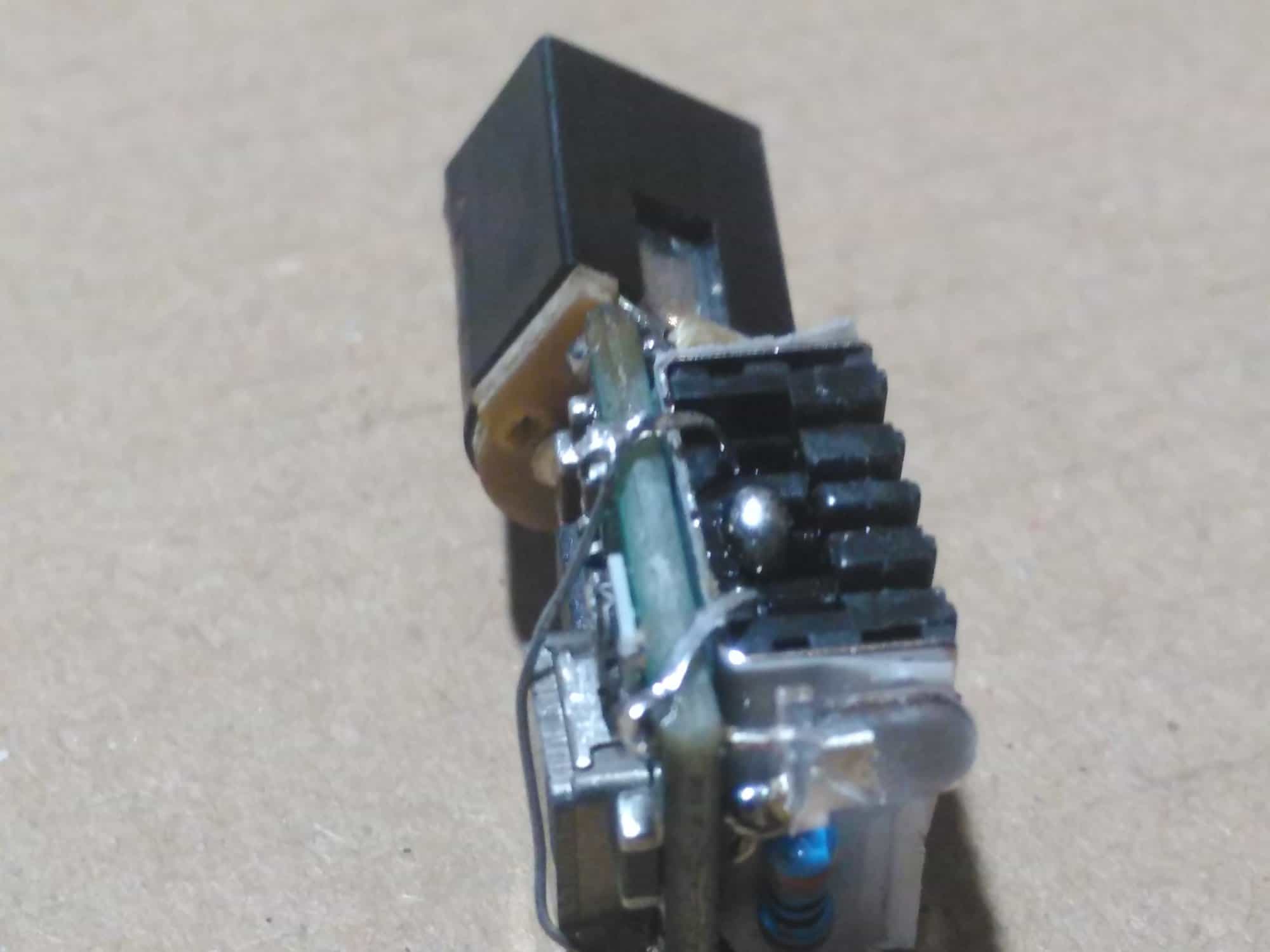
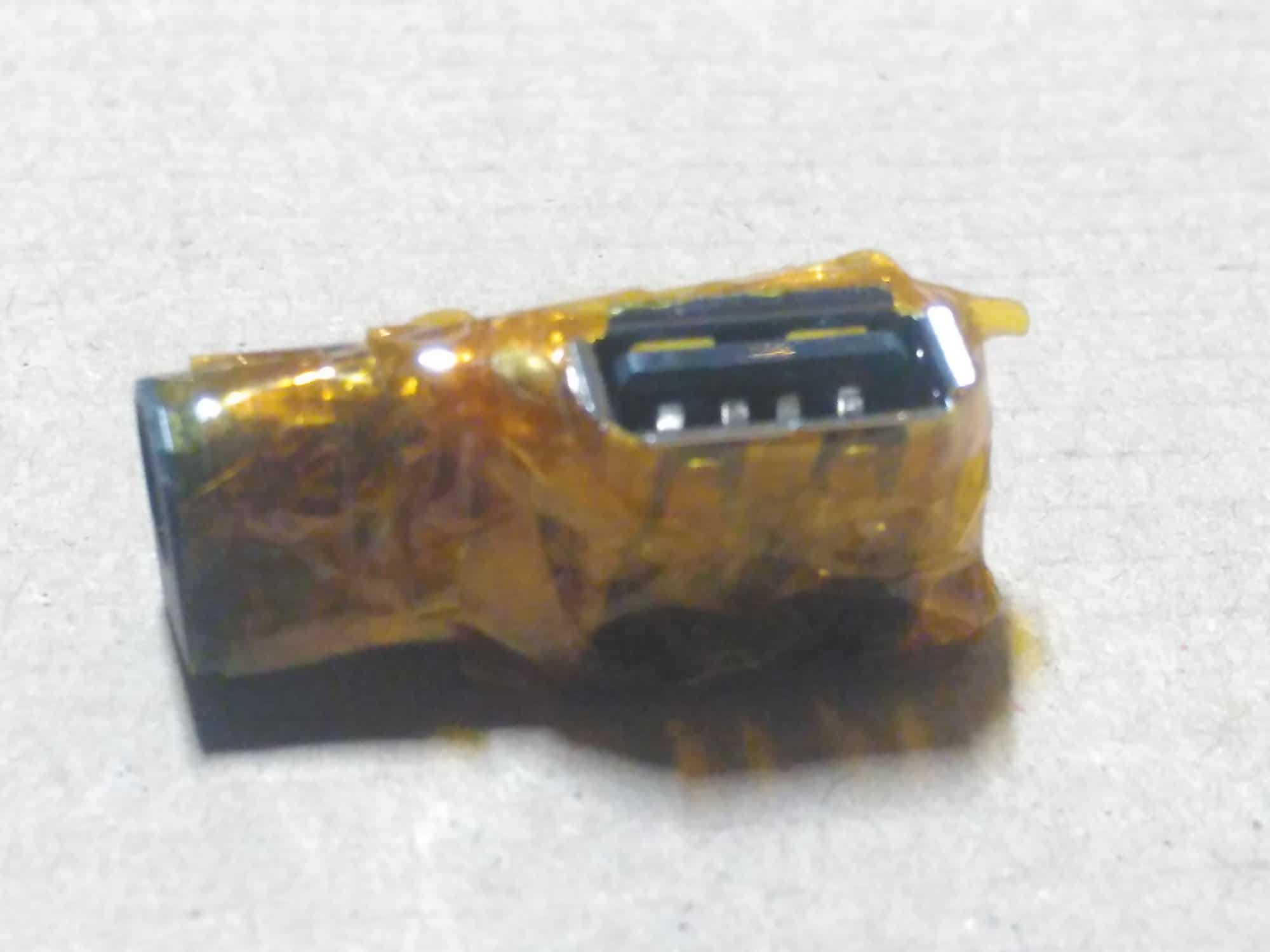
 Witam, nazywam się Przemek i chciałem wam przedstawić zasilacz na pomysł którego wpadłem gdy potrzebowałem na wyjazd powerbank, ale miałem już pakiet akumulatorów który chciałem w jakiś sposób wykorzystać. Przejrzałem części które posiadam w swoim "elektronicznym kąciku" i wpadłem na taki oto pomysł który tu przedstawiam. Do projektu potrzebujemy: przetwornicę: ja wykorzystałem Przetwornicę step-down D-SUN - posiada ona wydajność wystarczającą do większości projektów, napięcie wejściowe do 23V oraz daje radę z prądem 1,8 do 3 amperów (UWAGA powyżej 1,8A może się mocno nagrzewać) gniazdo wejściowe: Gniazdo DC 5.5 x 2.1mm do druku - pionowe - posiadałem akurat taki wtyk w pakiecie akumulatorów ale zawsze możecie dostosować wybór do własnych potrzeb gniazdo wyjściowe: Gniazdo USB typu A - żeńskie THT - jako, że oryginalnym zastosowaniem było ładowanie telefonu to wykorzystałem to złącze ale także łatwo je zmienić na inne dowolna taśma dwustronna taśma do zaizolowania układu (ja akurat miałem taką i okazało się, że nadaje się bardzo dobrze): Taśma kaptonowa 5mm Dodatkowa dioda informująca o działaniu "zasilacza": Zestaw diod LED 3mm - 30szt - tak naprawdę jest potrzebna 1 sztuka pod kolor taśmy ale za tą cenę warto kupić więcej zawsze LED do czegoś się przyda (ja w projekcie wykorzystałem diodę którą kiedyś kupiłem do innego zastosowania ale tu się sprawuje doskonale) Zestaw rezystorów CF THT 1/4W opisany - 200szt - także potrzebujemy tylko 1 rezystor 330Ω ale zapas rezystorów u każdego elektronika to podstawa Narzędzia: USB Power Detector - miernik prądu i napięcia z portu USB Miernik uniwersalny a dokładniej multimetr w zasadzie niemal dowolny, chociaż i tak każdy kto bierze się za taki projekt powinien go mieć Dowolne najlepiej małe obcęgi nożyczki nóż (najlepiej takiego typu Nóż z ostrzem łamanym 18mm - Vorel 76182) lutownica: Lutownica USB 8W - ZD20U - mała, tania i praktyczna lutownica jest bardzo wygodna do lutowania małych elementów (UWAGA: lutownica pobiera 1.3A więc nie zalecam podłączania jej do portu USB komputera) A więc do roboty: Przygotowane części: Od gniazda USB należy urwać wielokrotnie wyginając lub przyciąć nóżki oraz tak samo usunąć tylną blaszkę: Następnie zgodnie z danymi znalezionymi na tej stronie urywamy i lutujemy dwie środkowe linie danych Ja zrobiłem wersję "ekstremalną" z bardzo blisko zlutowanymi pinami, wy możecie je uciąć dalej będzie dużo wygodniej. Następnie przyklejamy i przycinamy taśmę dwustronną na USB (na niektórych zdjęciach zrobiłem błąd taśma powinna przechodzić od dołu lewego boku po górnej stronie gniazda do dołu prawego boku) I przyklejamy gniazdo do przetwornicy (kierunek wyjścia jest ważny ze względu na polaryzację wyjść przetwornicy i gniazda USB) Potem robimy modyfikację gniazda 5.5 x 2.1mm według obrazków: Proszę zauważyć że na 3 zdjęciu od końca są przycięte lekko piny aby gniazdo nie odstawało tak bardzo od przetwornicy, na ostatnim zdjęciu obudowa jest przycięta za pomocą zwykłego nożyka (polecam nie odcinać za jednym razem tylko ucinać po kawałeczku do uzyskania zadowalającego kształtu) Najtrudniejsza część tworzenia układu czyli lutowanie: Potem należy podłączyć zasilanie i za pomocą multimetra sprawdzić i wyregulować napięcie w zakresie 4,75-5,25V polecam ustawić jak najbliżej 5.1V - jest to napięcie mieszczące się w zakresie ale po odliczeniu strat spowodowanych rezystancją przewodów wyjdzie ok 5V i przy okazji zostawia trochę miejsca na ewentualną niedokładność napięcia wyjściowego przetwornicy. (Proszę się nie przejmować tą drugą kropką po prawej stronie wyświetlacza jest ona wynikiem lekko krzywego połączenia wyświetlacza) Następnie przygotowanie, lutowanie i testowanie diody LED (po stronie wyprostowanej nóżki diody - ta po prawej to katoda (-) można ją tak rozpoznać): Jeżeli dioda świeci znaczy że wszystko jest dobrze przylutowane, jeżeli się nie świeci sprawdź czy jest odpowiednie napięcie na wyjściu lub czy dioda nie jest odwrotnie przylutowana, gdy się pali/dymi/zaczyna śmierdzieć to rezystor jest za małej wartości lub go nie ma. Następnie należy przylutować gniazdo USB: A teraz chwila prawdy czyli test : Układ działa, a więc próba podłączenia obciążenia (nie polecam na test podłączać najpierw najdroższy telefon) Także działa czyli pora na izolację układu (czyli obwinięcie układu taśmą I zrobione, brawo!
Witam, nazywam się Przemek i chciałem wam przedstawić zasilacz na pomysł którego wpadłem gdy potrzebowałem na wyjazd powerbank, ale miałem już pakiet akumulatorów który chciałem w jakiś sposób wykorzystać. Przejrzałem części które posiadam w swoim "elektronicznym kąciku" i wpadłem na taki oto pomysł który tu przedstawiam. Do projektu potrzebujemy: przetwornicę: ja wykorzystałem Przetwornicę step-down D-SUN - posiada ona wydajność wystarczającą do większości projektów, napięcie wejściowe do 23V oraz daje radę z prądem 1,8 do 3 amperów (UWAGA powyżej 1,8A może się mocno nagrzewać) gniazdo wejściowe: Gniazdo DC 5.5 x 2.1mm do druku - pionowe - posiadałem akurat taki wtyk w pakiecie akumulatorów ale zawsze możecie dostosować wybór do własnych potrzeb gniazdo wyjściowe: Gniazdo USB typu A - żeńskie THT - jako, że oryginalnym zastosowaniem było ładowanie telefonu to wykorzystałem to złącze ale także łatwo je zmienić na inne dowolna taśma dwustronna taśma do zaizolowania układu (ja akurat miałem taką i okazało się, że nadaje się bardzo dobrze): Taśma kaptonowa 5mm Dodatkowa dioda informująca o działaniu "zasilacza": Zestaw diod LED 3mm - 30szt - tak naprawdę jest potrzebna 1 sztuka pod kolor taśmy ale za tą cenę warto kupić więcej zawsze LED do czegoś się przyda (ja w projekcie wykorzystałem diodę którą kiedyś kupiłem do innego zastosowania ale tu się sprawuje doskonale) Zestaw rezystorów CF THT 1/4W opisany - 200szt - także potrzebujemy tylko 1 rezystor 330Ω ale zapas rezystorów u każdego elektronika to podstawa Narzędzia: USB Power Detector - miernik prądu i napięcia z portu USB Miernik uniwersalny a dokładniej multimetr w zasadzie niemal dowolny, chociaż i tak każdy kto bierze się za taki projekt powinien go mieć Dowolne najlepiej małe obcęgi nożyczki nóż (najlepiej takiego typu Nóż z ostrzem łamanym 18mm - Vorel 76182) lutownica: Lutownica USB 8W - ZD20U - mała, tania i praktyczna lutownica jest bardzo wygodna do lutowania małych elementów (UWAGA: lutownica pobiera 1.3A więc nie zalecam podłączania jej do portu USB komputera) A więc do roboty: Przygotowane części: Od gniazda USB należy urwać wielokrotnie wyginając lub przyciąć nóżki oraz tak samo usunąć tylną blaszkę: Następnie zgodnie z danymi znalezionymi na tej stronie urywamy i lutujemy dwie środkowe linie danych Ja zrobiłem wersję "ekstremalną" z bardzo blisko zlutowanymi pinami, wy możecie je uciąć dalej będzie dużo wygodniej. Następnie przyklejamy i przycinamy taśmę dwustronną na USB (na niektórych zdjęciach zrobiłem błąd taśma powinna przechodzić od dołu lewego boku po górnej stronie gniazda do dołu prawego boku) I przyklejamy gniazdo do przetwornicy (kierunek wyjścia jest ważny ze względu na polaryzację wyjść przetwornicy i gniazda USB) Potem robimy modyfikację gniazda 5.5 x 2.1mm według obrazków: Proszę zauważyć że na 3 zdjęciu od końca są przycięte lekko piny aby gniazdo nie odstawało tak bardzo od przetwornicy, na ostatnim zdjęciu obudowa jest przycięta za pomocą zwykłego nożyka (polecam nie odcinać za jednym razem tylko ucinać po kawałeczku do uzyskania zadowalającego kształtu) Najtrudniejsza część tworzenia układu czyli lutowanie: Potem należy podłączyć zasilanie i za pomocą multimetra sprawdzić i wyregulować napięcie w zakresie 4,75-5,25V polecam ustawić jak najbliżej 5.1V - jest to napięcie mieszczące się w zakresie ale po odliczeniu strat spowodowanych rezystancją przewodów wyjdzie ok 5V i przy okazji zostawia trochę miejsca na ewentualną niedokładność napięcia wyjściowego przetwornicy. (Proszę się nie przejmować tą drugą kropką po prawej stronie wyświetlacza jest ona wynikiem lekko krzywego połączenia wyświetlacza) Następnie przygotowanie, lutowanie i testowanie diody LED (po stronie wyprostowanej nóżki diody - ta po prawej to katoda (-) można ją tak rozpoznać): Jeżeli dioda świeci znaczy że wszystko jest dobrze przylutowane, jeżeli się nie świeci sprawdź czy jest odpowiednie napięcie na wyjściu lub czy dioda nie jest odwrotnie przylutowana, gdy się pali/dymi/zaczyna śmierdzieć to rezystor jest za małej wartości lub go nie ma. Następnie należy przylutować gniazdo USB: A teraz chwila prawdy czyli test : Układ działa, a więc próba podłączenia obciążenia (nie polecam na test podłączać najpierw najdroższy telefon) Także działa czyli pora na izolację układu (czyli obwinięcie układu taśmą I zrobione, brawo!