Przeszukaj forum
Pokazywanie wyników dla tagów 'silnik DC'.
Znaleziono 11 wyników
-

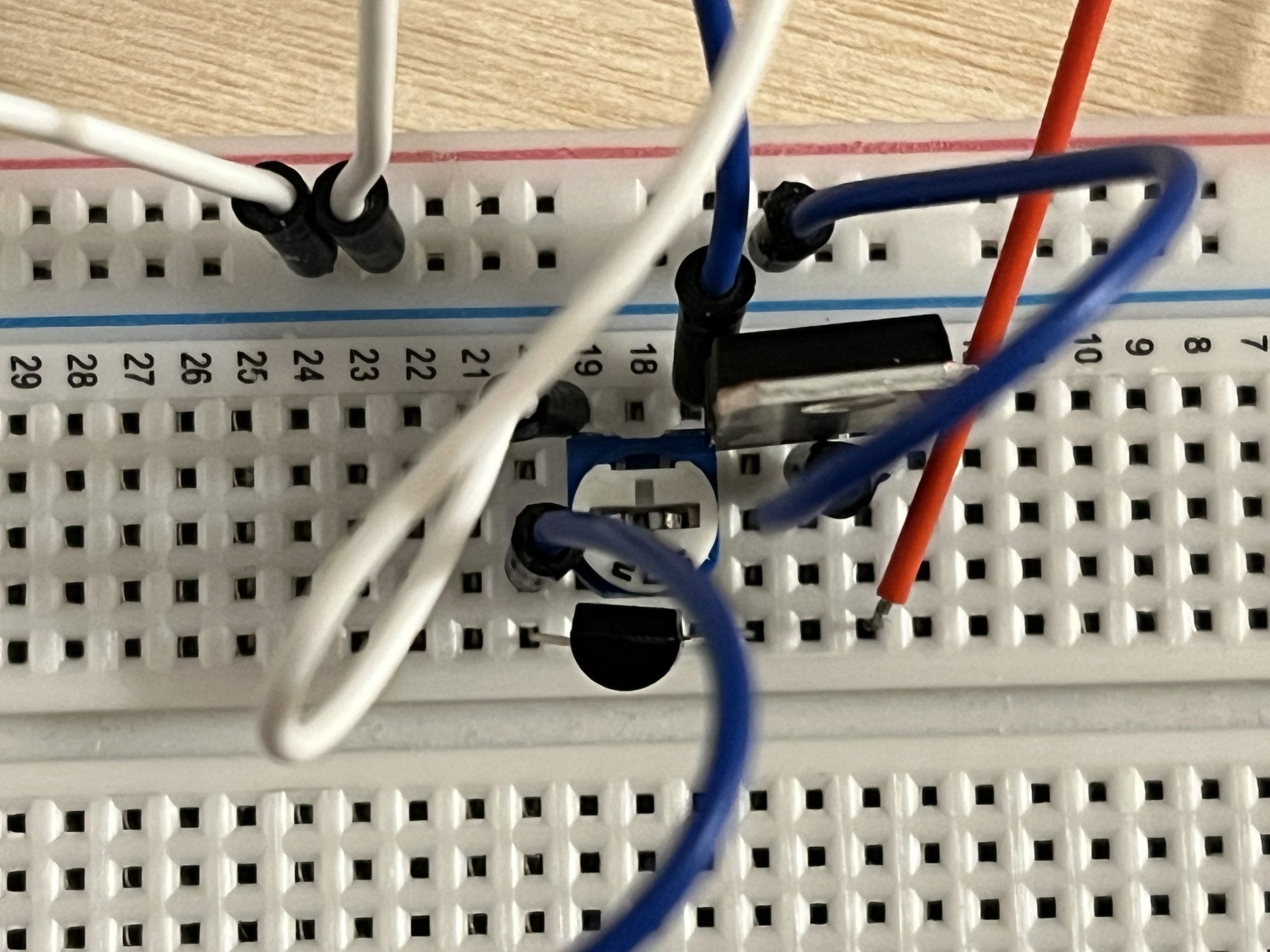
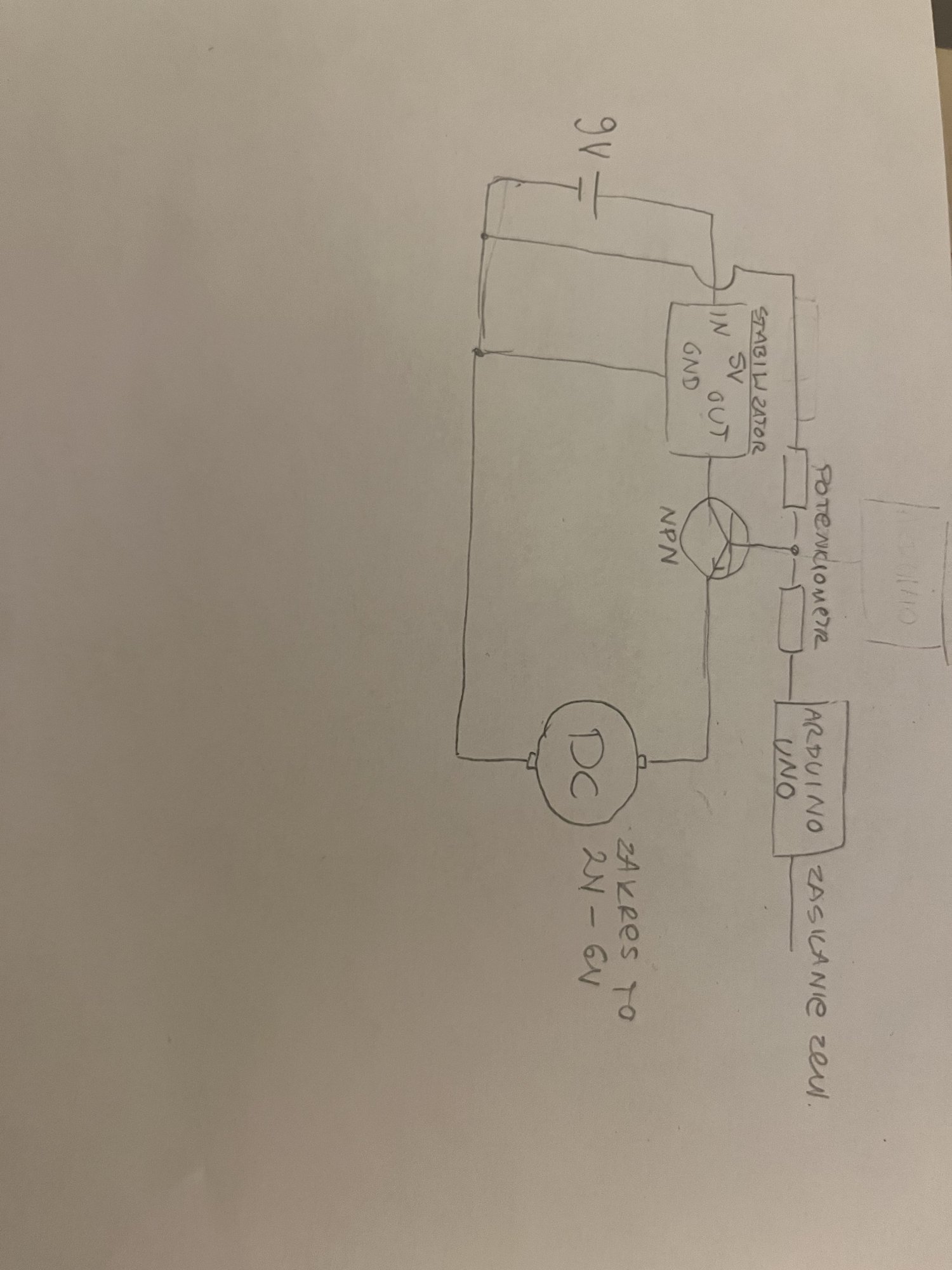
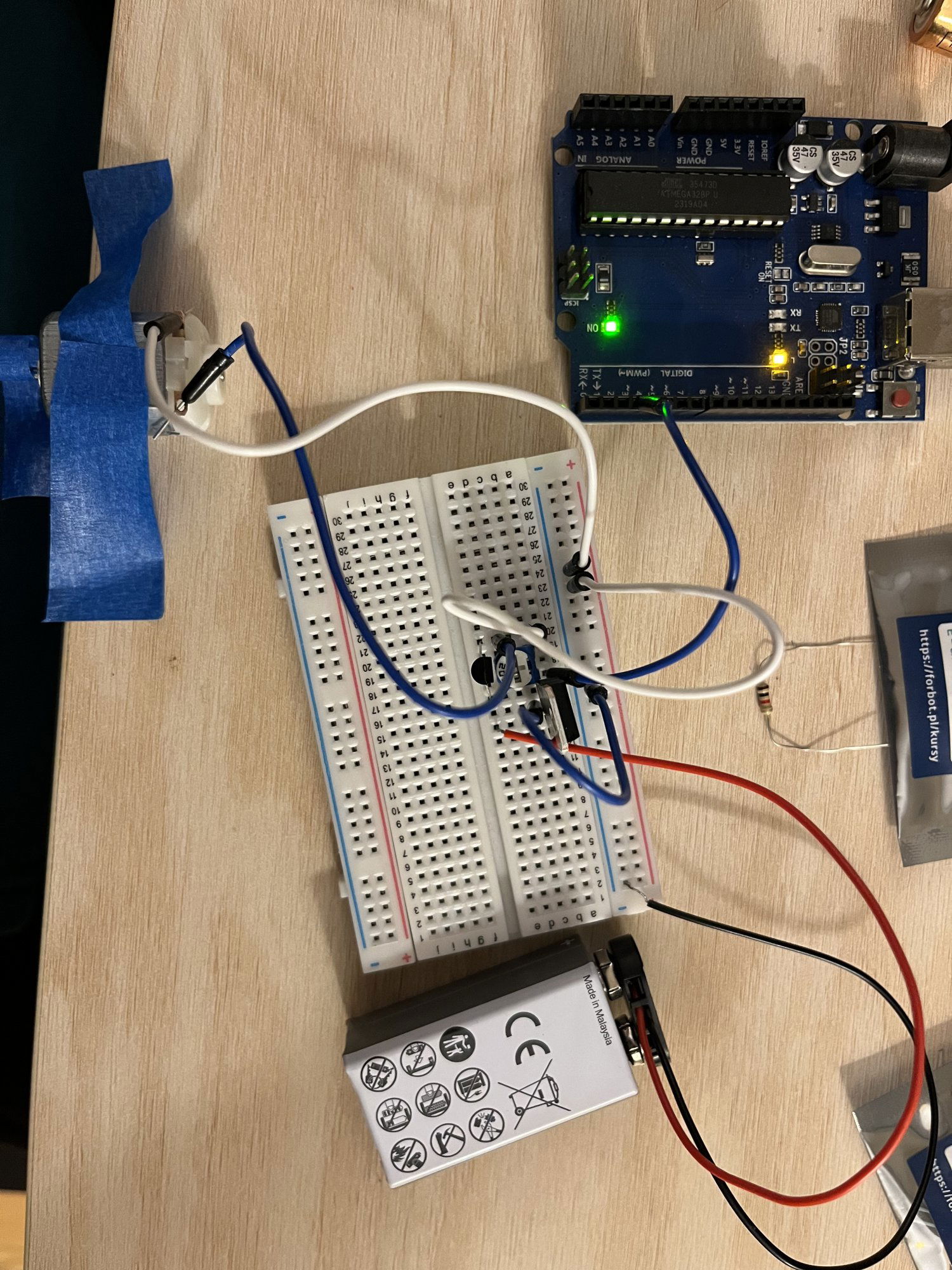
schemat Sterowanie DC za pomocą potencjometru i tranzystora
Torston opublikował temat w Sprawdzanie schematów
Emm, mam taki problem, pomimo że raczej dobrze połączyłem wszytko to nadal nie działa, próbowałem u chataGpt ale jakoś zbytnio nie pomógł, może wam się uda, próbuje za pomocą potencjometru i tranzystora NPN kontrolować prędkość silnika DC, niestety gdy dodaje potencjometr i tranzystor wszytko przestaje działać, stabilizator liniowy sam w sobie działa, reszta częsci też.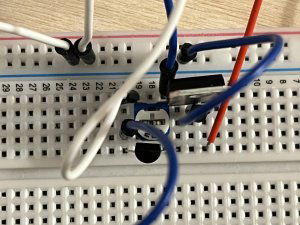


-
Witam, Jest to mój pierwszy post na tym forum więc z góry przepraszam jeśli coś opiszę nie tak. Od jakiegoś czasu testuje sobie kilka rozwiązań związanych z NE555, mniej lub bardziej skomplikowane operacje. Jest jedna rzecz, która nie wiem czy w ogóle jest możliwa. Prawdopodobnie przy użyciu dwóch NE555 Problem jest taki, chcę aby układ samoistnie poruszał silnik w prawo przez chwilę na małych obrotach następnie po 30 min ma się poruszyć w lewo też na chwilę i tak w kółko Czy jest to możliwe ? Pozdrawiam
-
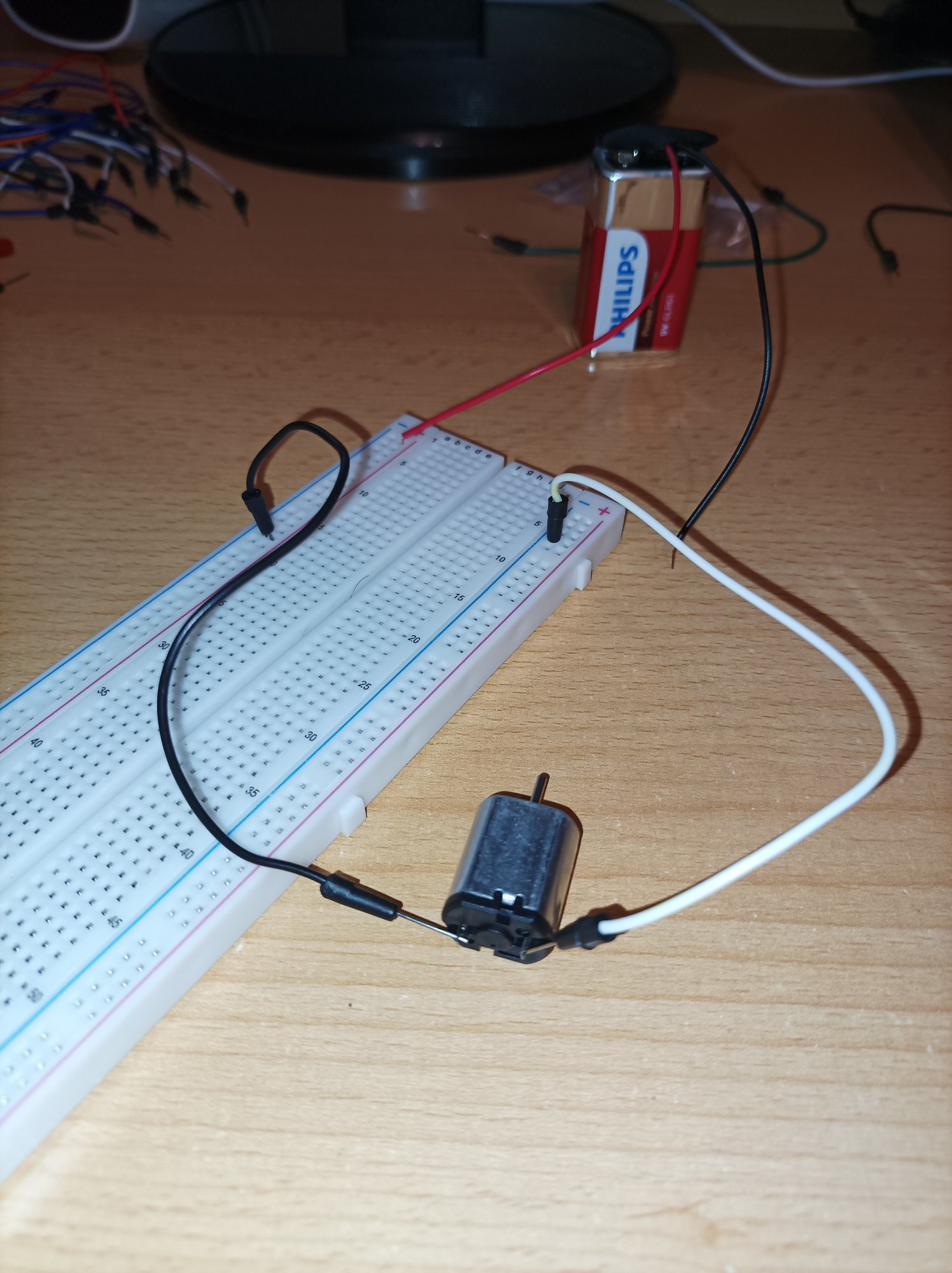
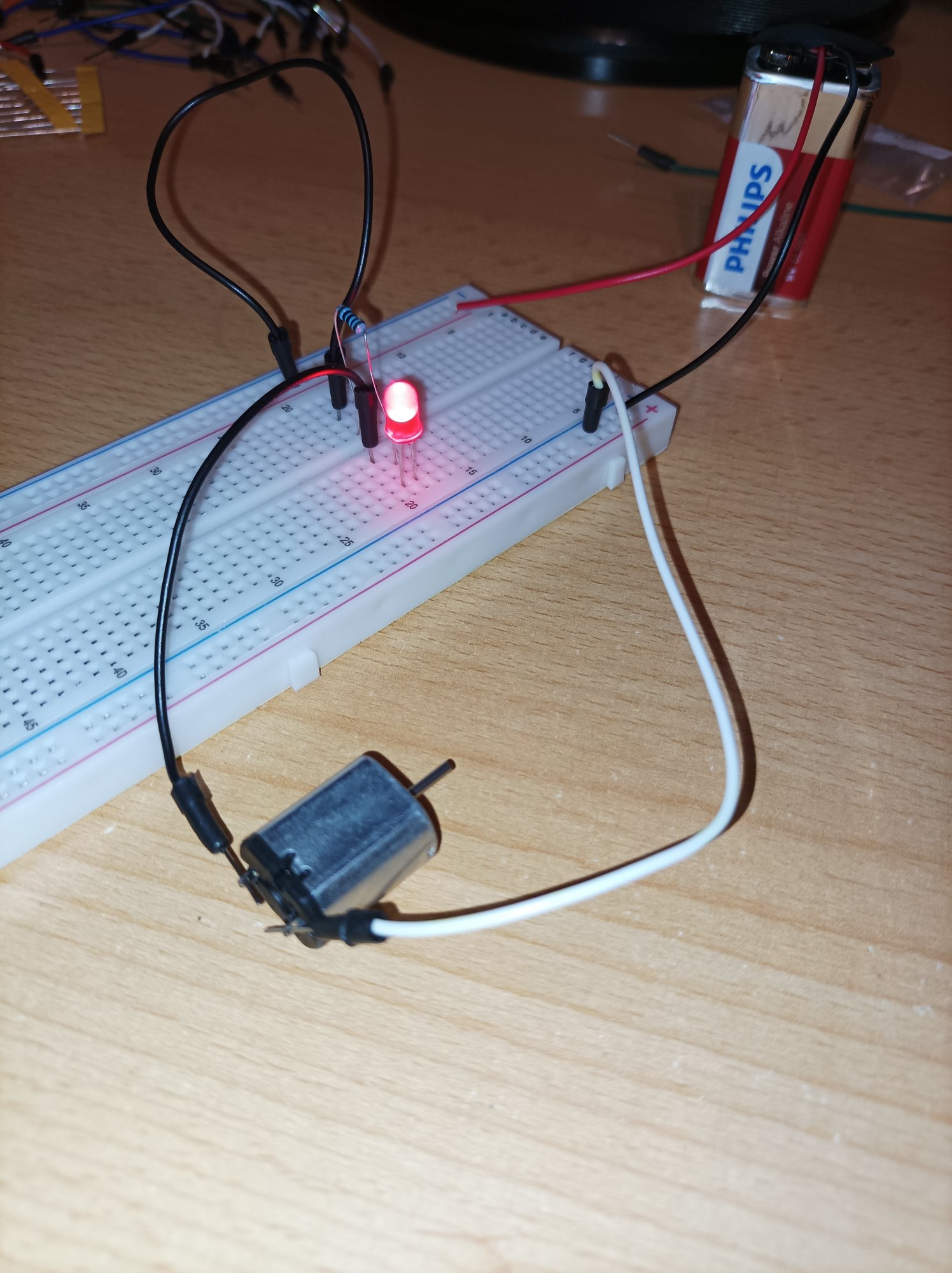
Cześć! Mam pytanie co robię źle. Próbuję podłączyć silniczek DC do układu. Kiedy łączę go bezpośrednio z baterią tak jak na obrazku 1 to silnik ładne działa. Minus baterii specjalnie jest wypięty, aby ułatwić zrobienie zdjęcia. Natomiast kiedy dodam rezystor 100Ω i czerwoną diodę LED (obrazek 2) to silniczek już nie działa. Dlaczego? Specjalnie dodałem tam diodę, aby być pewny, że prąd płynie w układzie. Bardzo proszę o podpowiedź co jest nie tak.


-
Na sprzedaż mam dwa silniki HP Pololu o przełożeniu 10:1 z enkoderem magnetycznym i kołami. Silniki nie były używane cena którą proponuje to 150zł + przesyłka Link do ogłoszenia allegro: https://allegrolokalnie.pl/oferty/sukces/silniczki-pololu-101-denkoder-kola

-
Cześć. W ramach projektu wymyśliłem sobie układ do sterowania wewnętrzną roletą w pokoju. Całość ma być kontrolowana przez ATmega328, ruch ma się odbywać między wyłącznikami krańcowymi, sterowanie pilotem / telefonem. Niestety kompletnie nie znam się na silnikach i nie wiem na ile mocny napęd jest mi potrzebny. Czy mógłbym prosić o podanie mi jakiegoś wzoru / skrótu myślowego, który pomoże dobrać mi moc silnika? Chciałbym użyć najprostszego silnika DC i umiejscowić go na dole łańcuszka poruszającego całością . Roleta ma wymiary 80x150 cm i waży ~1 kg.
-
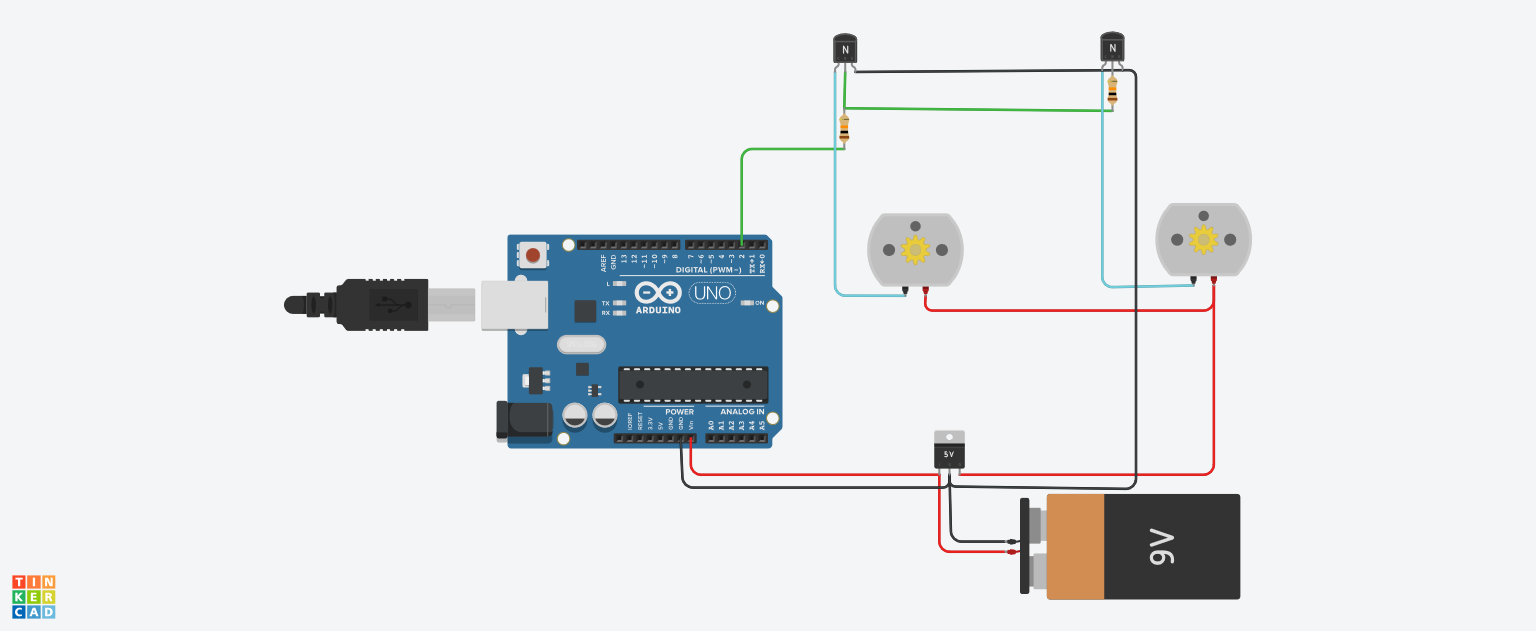
Cześć, jestem w trakcie robienia projektu mini pająka opartego na silnikach wibracyjnych, w załączniku jest fragment, z którym mam problem. Silnik 2 (ten po prawej) zupełnie nie działa, mimo że osobno oba działały. Czy jest to spowodowane złym ustawieniem oporników, czy gdzieś indziej jest błąd? Z góry dzięki. ;)
-
Sprzedam silniczki firmy Faulhaber. Cena za szt. 100 PLN. Przy zakupie wiekszej ilości, możliwy rabat. Kontakt 798 415 578.

-
Planuje zrobic model samochodu sterowany przez telefon. Mialem jeszcze w domu stary zepsuty samochod wiec go rozebralem na czesci. I ku mojemu zaskoczeniu w ukladzie sterujacym osia znalazlem zwykly silnik, nie serwo lub silnik krokowy. I tutaj mam pytanie, jak to moglo byc sterowane. Nie ma chyba mozliwosci bez innych dodatkowych elementow zmierzenia kata obrotu.
-
Mam silnik elektryczny 9V i jest tam napisane "2400 N" . Co to znaczy? Szukałem w internecie i nic nie znalazłem.
-

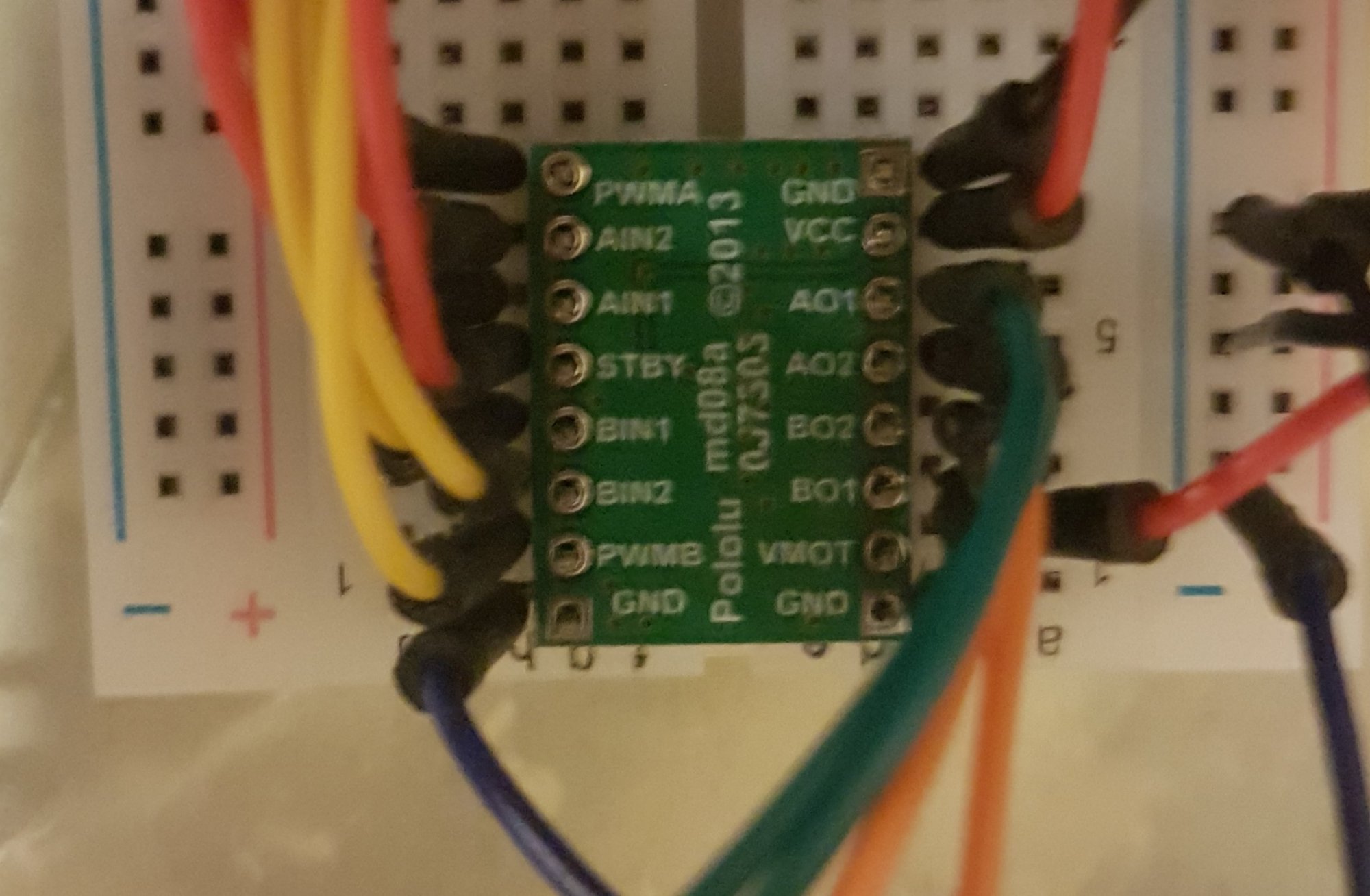
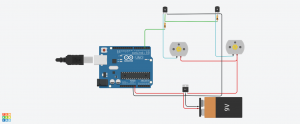
Arduino Sterownik TB6612 FNG z dwoma silnikami DC - nie uruchamiają się.
Eobs opublikował temat w Elektronika
Dzień dobry, Próbuję stworzyć platformę jeżdżącą dzięki dwóm silnikom DC sterowanym dzięki sterownikowi TB 6612 FNG. Resztę czujników mam oprogramowaną, brakuje mi tylko właśnie tego stesrownika z DC Silniki: https://botland.com.pl/pl/silniki-dc-katowe-z-przekladnia/3696-kolo-silnik-65x26mm-5v-z-przekladnia-481.html Sterownik: https://botland.com.pl/pl/sterowniki-silnikow-moduly/32-pololu-tb6612fng-dwukanalowy-sterownik-silnikow-135v1a.html Zdjęcie sterownika: Sterownik - Pin z arduino do którego jest wpięty PWMA - Digital 5 AIN2 - Digital 7 AIN1 - Digital 6 PWMB - Digital 10 BIN2 - Digital 9 BIN1 - Digital 8 STBY - Digital 13 Wszystkie GND - GND VCC - 5V z arduino. A/B[01/02] -- silniki VMOT - 5V z arduino Kod: #include <SparkFun_TB6612.h> //Motor 1 int pinAIN1 = 6; //Direction int pinAIN2 = 7; //Direction int pinPWMA = 5; //Speed //Motor 2 int pinBIN1 = 8; //Direction int pinBIN2 = 9; //Direction int pinPWMB = 10; //Speed //Standby int pinSTBY = 13; //Constants to help remember the parameters static boolean turnCW = 0; //for motorDrive function static boolean turnCCW = 1; //for motorDrive function static boolean motor1 = 0; //for motorDrive, motorStop, motorBrake functions static boolean motor2 = 1; //for motorDrive, motorStop, motorBrake functions void setup() { //Set the PIN Modes pinMode(pinPWMA, OUTPUT); pinMode(pinAIN1, OUTPUT); pinMode(pinAIN2, OUTPUT); pinMode(pinPWMB, OUTPUT); pinMode(pinBIN1, OUTPUT); pinMode(pinBIN2, OUTPUT); pinMode(pinSTBY, OUTPUT); } void loop() { //Drive both motors CW, full speed motorDrive(motor1, turnCW, 255); motorDrive(motor2, turnCW, 255); //Keep driving for 2 secs delay(2000); //Turn towards motor1: Stop Motor1, slow Motor2 motorStop(motor1); motorDrive(motor2, turnCW, 192); //Keep turning for 2 secs delay(2000); //Turn in opposite direction: Stop Motor2, slow Motor1 motorDrive(motor1, turnCW, 192); delay(250); motorStop(motor2); //Keep turning for 2 secs delay(2000); //Straighten up motorDrive(motor2, turnCW, 192); delay(500); //Put motors into Standby motorsStandby(); delay(1000); //Do a tight turn towards motor1: Motor2 forward, Motor1 reverse motorDrive(motor1, turnCCW, 192); motorDrive(motor2, turnCW, 192); //Keep turning for 2 secs delay(2000); //Apply Brakes, then into Standby motorBrake(motor1); motorBrake(motor2); motorsStandby(); //Stand still for 5 secs, then we do it all over again... delay(5000); } void motorDrive(boolean motorNumber, boolean motorDirection, int motorSpeed) { /* This Drives a specified motor, in a specific direction, at a specified speed: - motorNumber: motor1 or motor2 ---> Motor 1 or Motor 2 - motorDirection: turnCW or turnCCW ---> clockwise or counter-clockwise - motorSpeed: 0 to 255 ---> 0 = stop / 255 = fast */ boolean pinIn1; //Relates to AIN1 or BIN1 (depending on the motor number specified) //Specify the Direction to turn the motor //Clockwise: AIN1/BIN1 = HIGH and AIN2/BIN2 = LOW //Counter-Clockwise: AIN1/BIN1 = LOW and AIN2/BIN2 = HIGH if (motorDirection == turnCW) pinIn1 = HIGH; else pinIn1 = LOW; //Select the motor to turn, and set the direction and the speed if(motorNumber == motor1) { digitalWrite(pinAIN1, pinIn1); digitalWrite(pinAIN2, !pinIn1); //This is the opposite of the AIN1 analogWrite(pinPWMA, motorSpeed); } else { digitalWrite(pinBIN1, pinIn1); digitalWrite(pinBIN2, !pinIn1); //This is the opposite of the BIN1 analogWrite(pinPWMB, motorSpeed); } //Finally , make sure STBY is disabled - pull it HIGH digitalWrite(pinSTBY, HIGH); } void motorBrake(boolean motorNumber) { /* This "Short Brake"s the specified motor, by setting speed to zero */ if (motorNumber == motor1) analogWrite(pinPWMA, 0); else analogWrite(pinPWMB, 0); } void motorStop(boolean motorNumber) { /* This stops the specified motor by setting both IN pins to LOW */ if (motorNumber == motor1) { digitalWrite(pinAIN1, LOW); digitalWrite(pinAIN2, LOW); } else { digitalWrite(pinBIN1, LOW); digitalWrite(pinBIN2, LOW); } } void motorsStandby() { /* This puts the motors into Standby Mode */ digitalWrite(pinSTBY, LOW); } W kodzie nic nadzwyczajnego nie powinno się znajdować. Korzystam z biblioteki "Sparkfun'a". Sam kodo pochodzi z jego gita. @up kod działa. Jest ok. Piny są podpięte jak w zestawieniu powyżej. Z kodem się zgadzają, z tego co rozumiem ten kod. To silniki powinny się uruchomić, wykonać sekwencję opisane w komentarzach w kodzie i się zatrzymać. Nie mam pojęcia co może być nie tak. Kable do silników są przylutowane. Napięcie w bateriach, na płytce się zgadza, sprawdzone multimetrem. Mogę jeszcze spróbować dać 6V (z 4 paluszków) na sterownik, jako napięcie dla silników i może wtedy ruszy. (Zakres dla sterownika to od 4.5V do 13.5V, na napięcie dla silników). Czy możliwe, że mam złą bibliotekę do sterownika? Próbowałem napisać własne funkcje sterownika. Które ustawiały bity i sterowały silnikami przez mostki na sterowniku (nawiązując do tabelki ze strony 4 ze specyfikacji producenta -> https://www.sparkfun.com/datasheets/Robotics/TB6612FNG.pdf) @up Problem rozwiązałem. Zlutowałem piny w sterowniku (gdzieś w internecie widziałem jak ktoś tak korzystał bez zlutowanych, no mu to jakoś wyszło, nie polecam). Źródło zasilania silników zmieniłem na 4baterie AA, potem na 6baterii AA i zaczęło działać. W razie pytań zapraszam do kontaktu PW. @@up Temat do zamknięcia
-
Silnik DC na 6V można podłączyć do zasilania 12V z pwm o wypełnieniu 50%, pwm o częstotliwości 30kHz. Przeprowadzał ktoś takie próby? Teoretycznie powinno działać. Pozdrawiam