Przeszukaj forum
Pokazywanie wyników dla tagów 'gps'.
Znaleziono 7 wyników
-

Projekt zegarka opartego na GPS zamiast DS3231/DS1307
pawel26021995 opublikował temat w Projekty - DIY
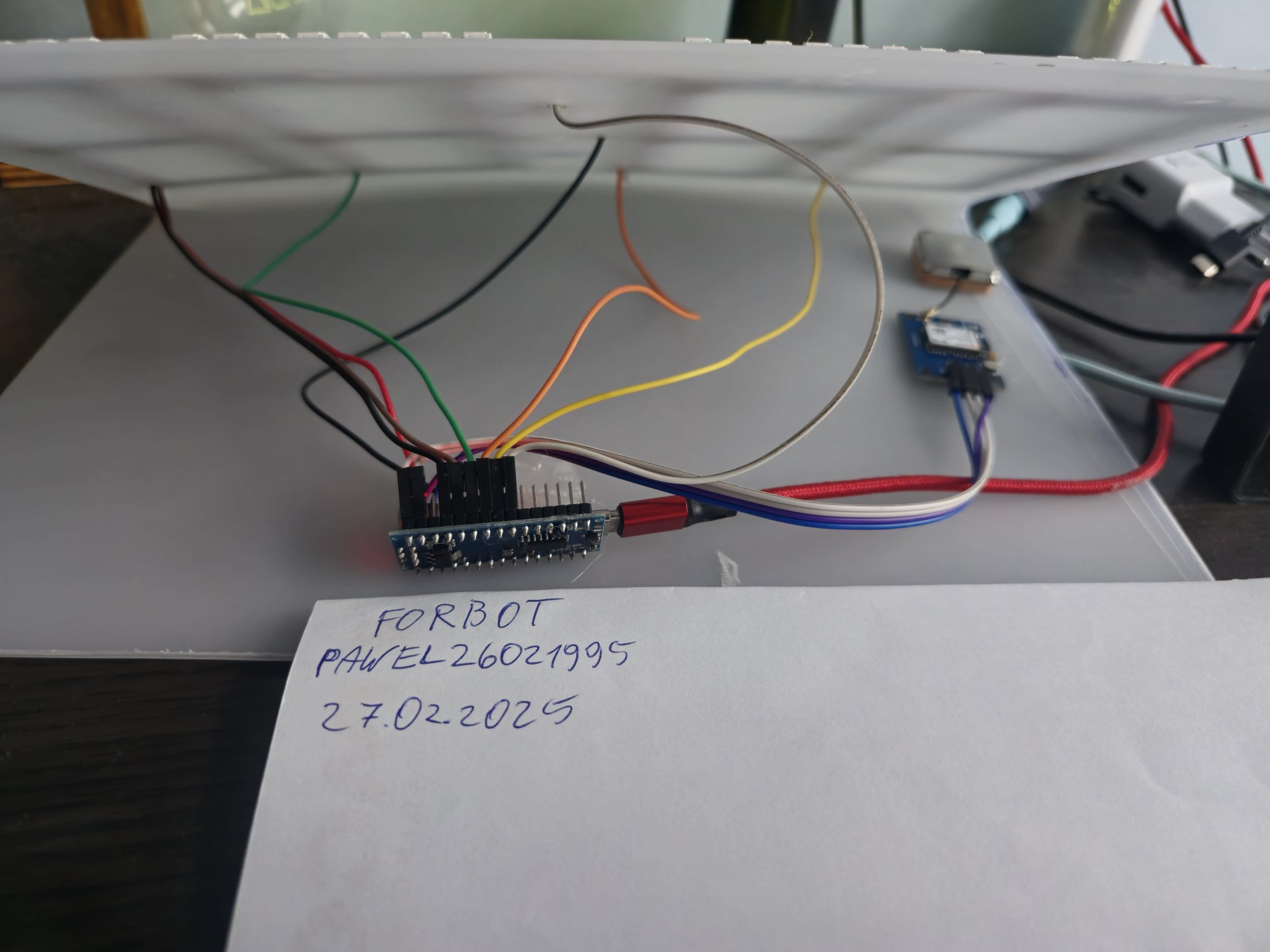
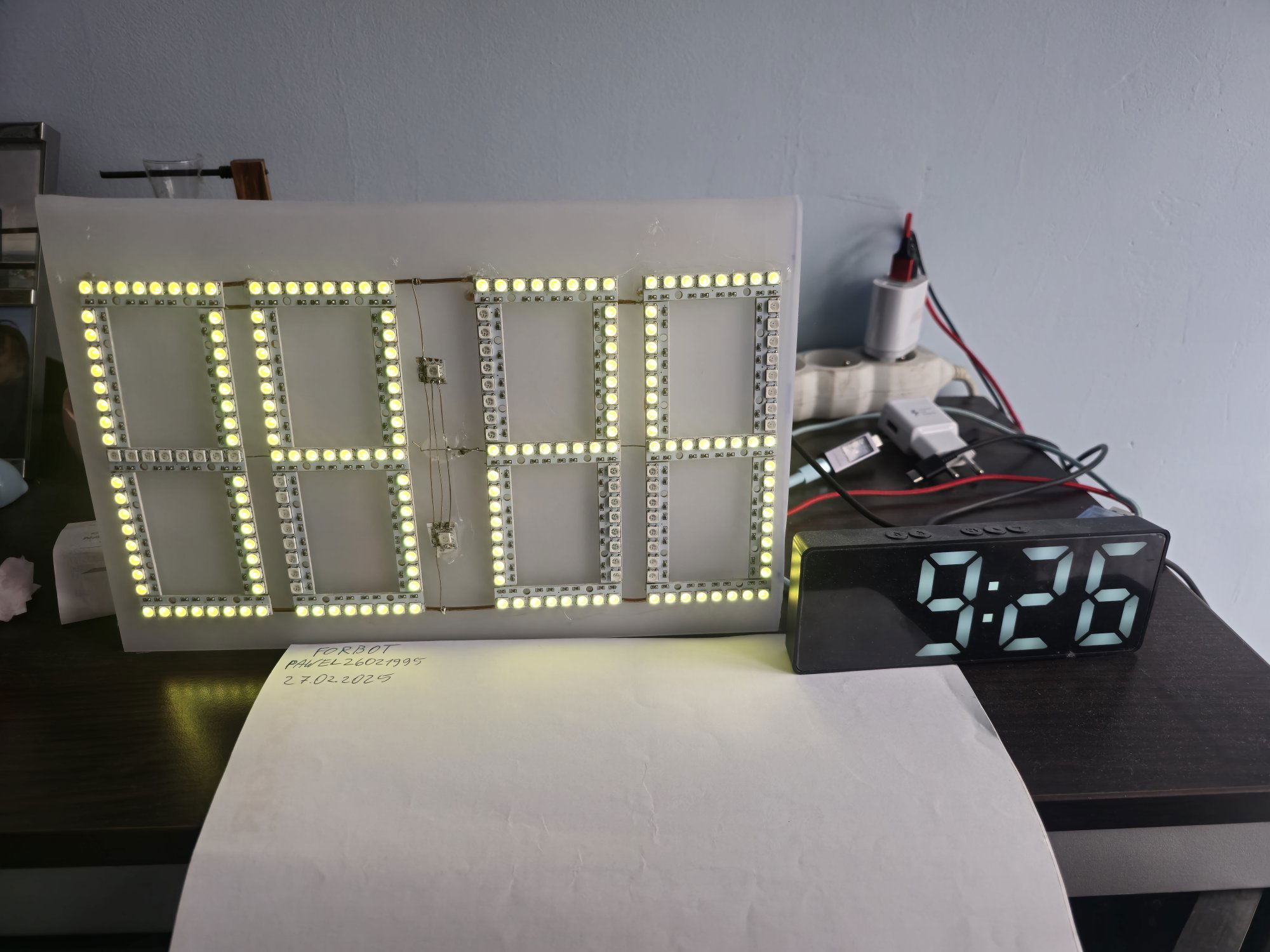
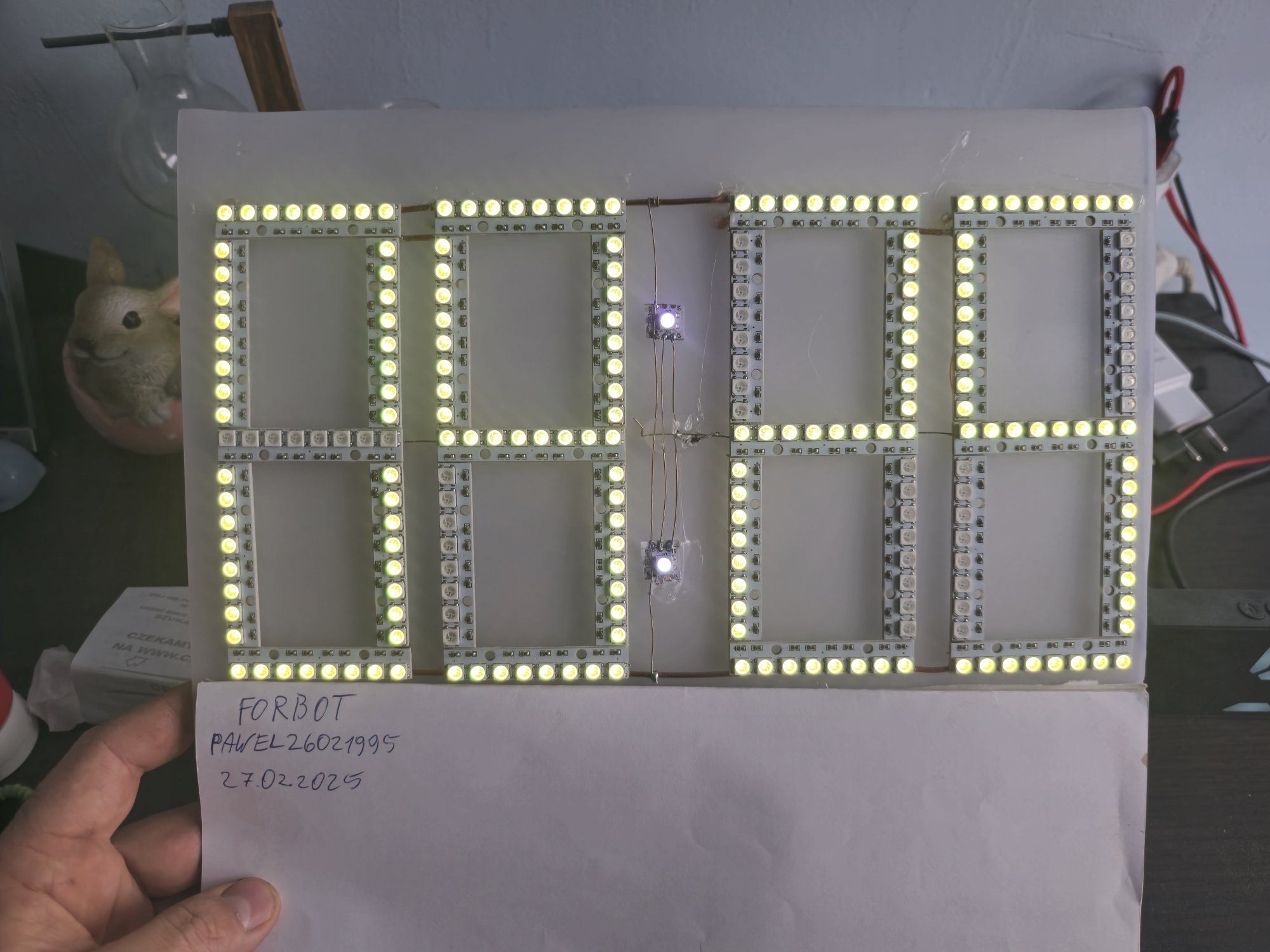
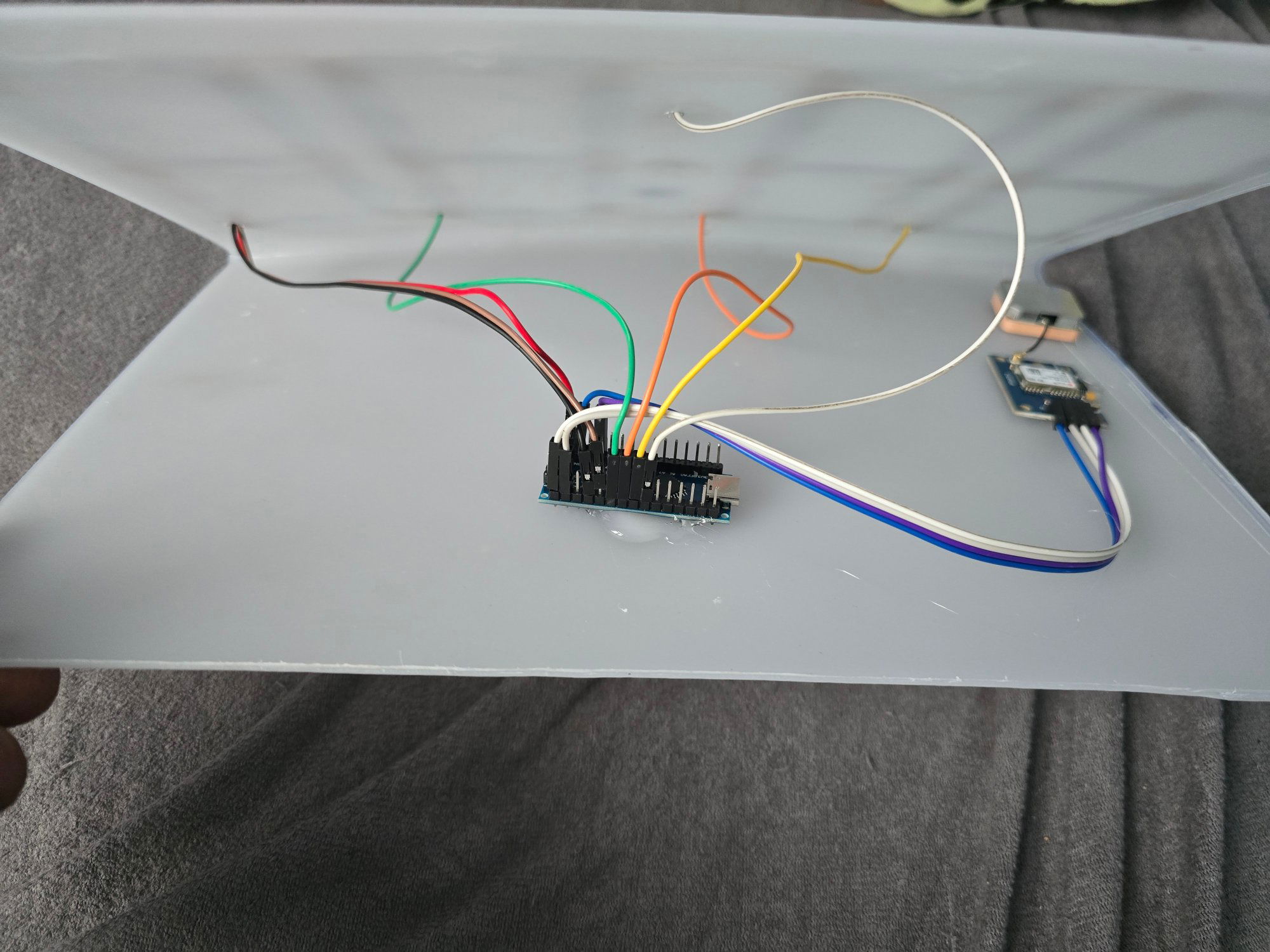
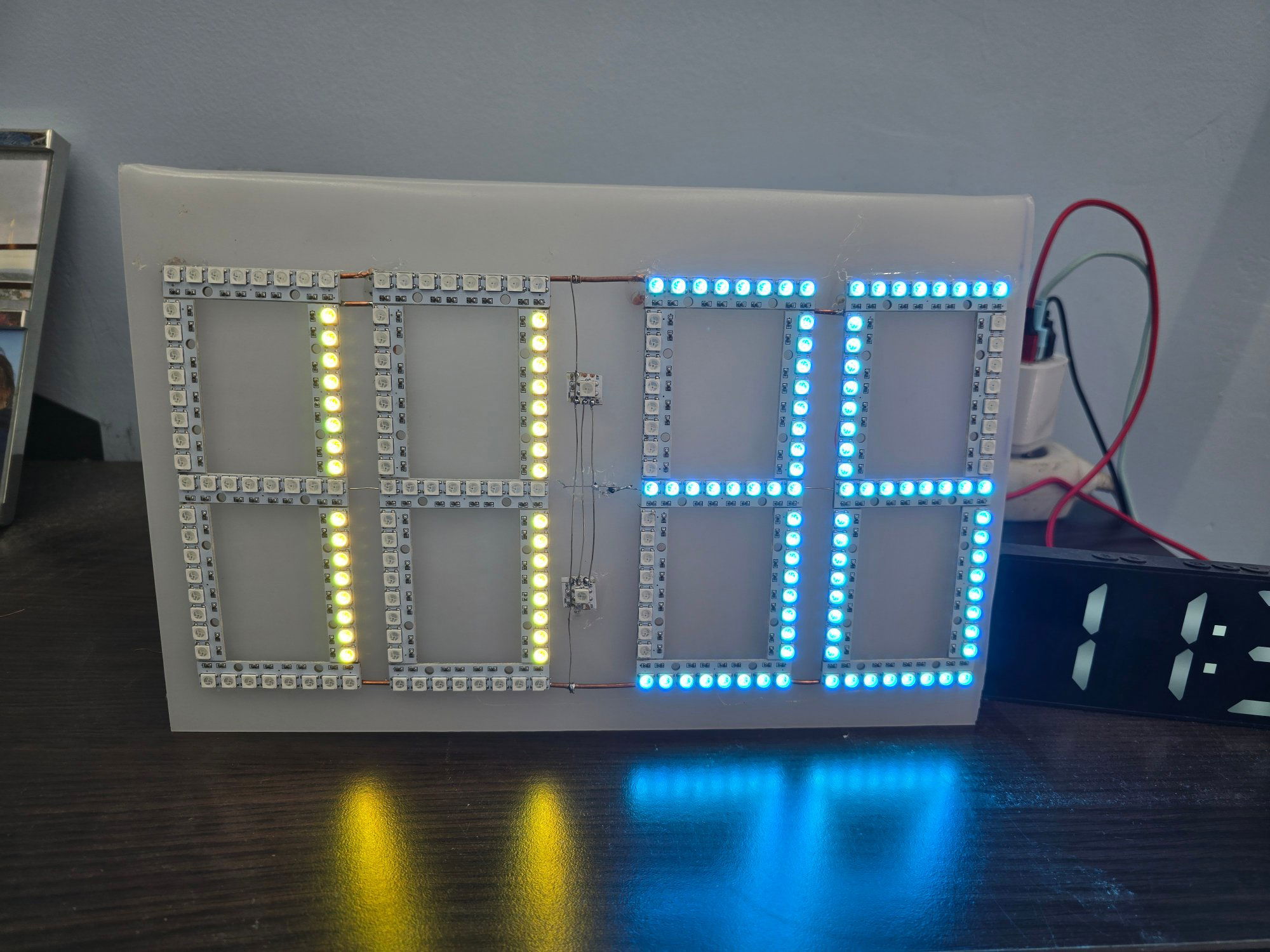
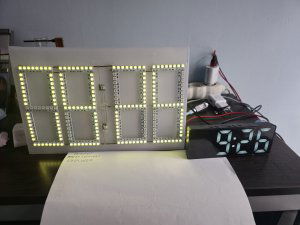
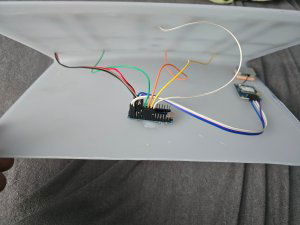
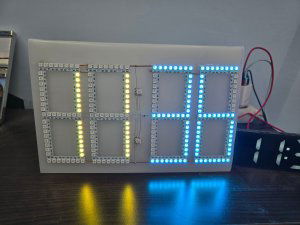
Projekt zegarka opartego na GPS jako module czasu rzeczywistego. Po kilku testach układów DS1307 oraz DS3231 stwierdziłem, że nie są one wystarczająco precyzyjne; każdy z nich po jakimś czasie gubi parę minut. Testowałem układy zakupione w Polsce i w Chinach – każdy zachowywał tak samo, uje stąd pomysł na wykorzystanie modułu GPS jako źródła czasu rzeczywistego. Cena modułu GPS w Chinach to około 8 zł, więc porównywalnie do ceny układów DS. Zastosowanie LED-ów WS2812B 5V pozwala na tworzenie różnych animacji i wybór kolorów spośród 16 777 216 możliwości oraz wybór jasności 0–255. W ostatecznej wersji programu pozostałem przy jednym kolorze, który najbardziej mi odpowiada. Program umożliwia łatwą zmianę koloru i ilości użytych diod. Zastosowano 28 modułów LED WS2812B 8-bitowych tworzących wyświetlacze 7-segmentowe: LED-y 0–7 – segment a, 8–15 – segment b itd. Każde 8 LED-ów tworzy osobny wyświetlacz i jest podłączone do innego wyjścia Arduino. Podzielone są na dziesiątki godzin, godziny, dziesiątki minut i minuty oraz dwukropek, który jest zrobiony z dwóch diod LED WS2812B z taśmy LED. Ponieważ jasność diod LED w nocy może być oślepiająca, zastosowałem warunek, który zmienia jasność diod LED na 10 w godzinach 20–6. Można też całkowicie wyłączyć zegarek w tych godzinach. Minimalna jasność dobrze się sprawdza w nocy, w szczególności po przebudzeniu. Strefa czasowa jest ustawiona na stałe na +1 względem czasu UTC. Strefę czasową można zmienić za pomocą komunikacji szeregowej, wysyłając żądaną wartość. Program korzysta ze standardowych bibliotek NeoPixel oraz TinyGPS++. Całość przyklejona jest do plexy z podświetlania z zepsutego monitora. Podgrzana hotair aby była plastyczna do formowania w kształt V. Podłączenie jest tak proste, że nie potrzeba schematu. Całkowity koszt budowy zegarka około 50zł kupując części w chinach. Zachęca do wspierania Polskich sklepów takich jak botland. Opis programu: //wykorzystane biblioteki do obsługi GPS oraz ledów ws2812. #include <Adafruit_NeoPixel.h> #include <TinyGPS++.h> // Definicja segmentów ósemki (po 8 LED na segment) const uint8_t segments[8][8] = { {0, 1, 2, 3, 4, 5, 6, 7}, // Segment A {8, 9, 10, 11, 12, 13, 14, 15}, // Segment B {16, 17, 18, 19, 20, 21, 22, 23}, // Segment C {24, 25, 26, 27, 28, 29, 30, 31}, // Segment D {32, 33, 34, 35, 36, 37, 38, 39}, // Segment E {40, 41, 42, 43, 44, 45, 46, 47}, // Segment F {48, 49, 50, 51, 52, 53, 54, 55} // Segment G }; W tym miejscu można dowolnie zmieniać ilość zastosowanych ledów podzielonych na segmenty. // Mapowanie cyfr na segmenty (0 = wyłączony, 1 = włączony) const uint8_t digitMap[10][7] = { {1, 1, 1, 1, 1, 1, 0}, // 0 {0, 1, 1, 0, 0, 0, 0}, // 1 {1, 1, 0, 1, 1, 0, 1}, // 2 {1, 1, 1, 1, 0, 0, 1}, // 3 {0, 1, 1, 0, 0, 1, 1}, // 4 {1, 0, 1, 1, 0, 1, 1}, // 5 {1, 0, 1, 1, 1, 1, 1}, // 6 {1, 1, 1, 0, 0, 0, 0}, // 7 {1, 1, 1, 1, 1, 1, 1}, // 8 {1, 1, 1, 1, 0, 1, 1} // 9 }; Tworzenie mapy ledów tak, aby cały segment 8 LED był wykorzystywany jako jeden LED. uint8_t newBrightness = (hour >= 20 || hour < 6) ? 2 : 10;//Operator trójargumentowy działa w postaci: warunek ? wartość_jeśli_prawda : wartość_jeśli_fałsz; Sprawdzanie aktualnego czasu i dostosowywanie jasności zegara. // Funkcja wyświetlająca czas na wszystkich ósemkach void displayTime(int hour, int minute, int second) { displayDigit(strip1, hour / 10, strip1.Color(100, 100, 0)); // Dziesiątki godzin displayDigit(strip2, hour % 10, strip2.Color(100, 100, 0)); // Jedności godzin displayDigit(strip3, minute / 10, strip3.Color( 100, 100, 0)); // Dziesiątki minut displayDigit(strip4, minute % 10, strip4.Color(100, 100, 0)); // Jedności minut } Podział czasu na dziesiątki i jedności oraz wybór koloru. Zdjęcia projektu: Dla porównania zegarek oparty o DS1307 ustawiony 01.02.2025 równo z GPS, spieszy o około 1,5 minuty. Cały program można pobrać z Google dysku 7egment_ws2812b_gps_nano.zip Arduino nano LED WS2812B GPS


-
 Cześć, chciałbym zlecić napisanie programu sterującego modelem łódki. Łódka dwusilnikowa (silniki szczotkowe klasy 500 + regulatory ESC). Program ma mieć możliwość wpisania na sztywno koordynatów GPS czyli załóżmy: 50.365044428151755, 18.562147930177403 Po uruchomieniu łódki i urządzenia łódka ma za zadanie przepłynąć do celu w linii prostej. I tyle nie chce żadnych fajerwerków sterowania itd. tylko sam algorytm wyznaczenia i utrzymywania kierunku przez łódkę tak by do celu płynęła w linii prostej Wymagane źródła najlepiej w C (ale nie upieram się ), procesor STM32F1xx lub STM32F4xx do tego GPS RadioLink M8N SE100 i jakiś IMU jest mi obojętne może być GY-91 lub inne wskazane. Oferty tylko poważne, proszę kierować na mail [email protected] Budżet 1500zł.
Cześć, chciałbym zlecić napisanie programu sterującego modelem łódki. Łódka dwusilnikowa (silniki szczotkowe klasy 500 + regulatory ESC). Program ma mieć możliwość wpisania na sztywno koordynatów GPS czyli załóżmy: 50.365044428151755, 18.562147930177403 Po uruchomieniu łódki i urządzenia łódka ma za zadanie przepłynąć do celu w linii prostej. I tyle nie chce żadnych fajerwerków sterowania itd. tylko sam algorytm wyznaczenia i utrzymywania kierunku przez łódkę tak by do celu płynęła w linii prostej Wymagane źródła najlepiej w C (ale nie upieram się ), procesor STM32F1xx lub STM32F4xx do tego GPS RadioLink M8N SE100 i jakiś IMU jest mi obojętne może być GY-91 lub inne wskazane. Oferty tylko poważne, proszę kierować na mail [email protected] Budżet 1500zł. -
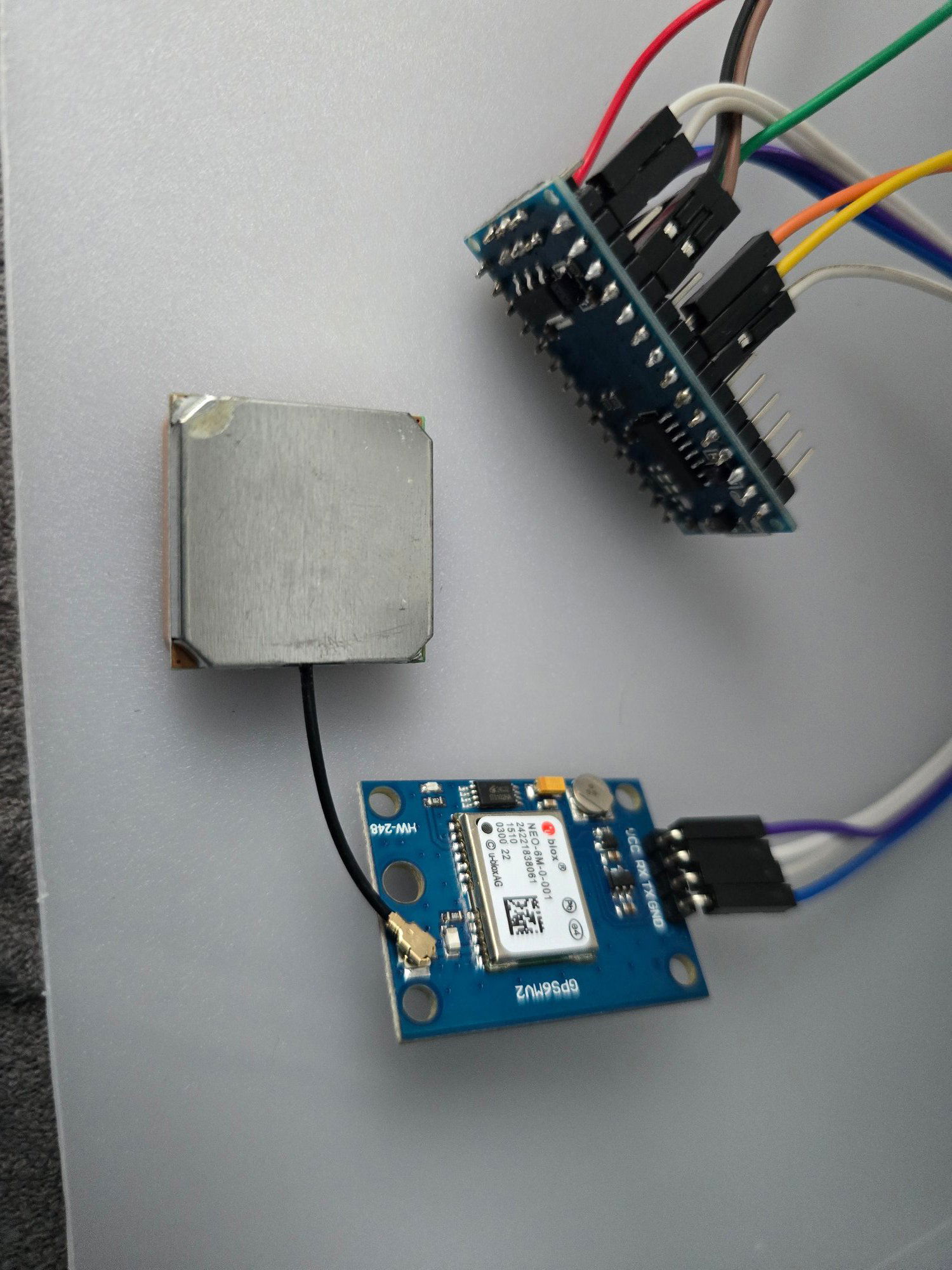
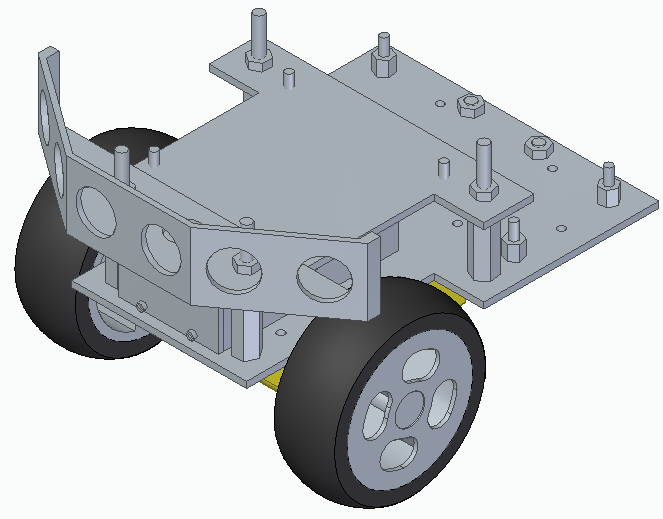
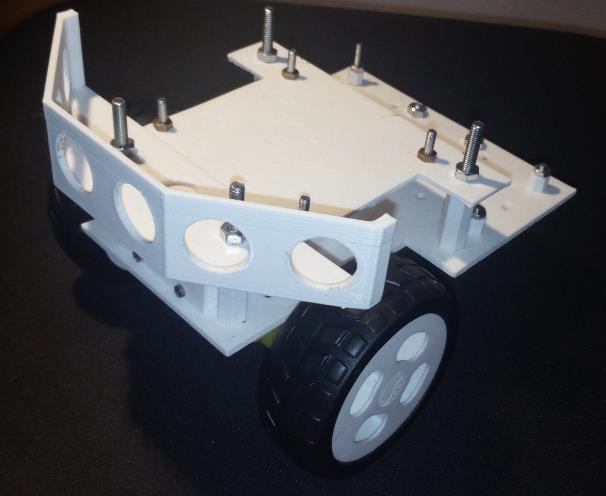
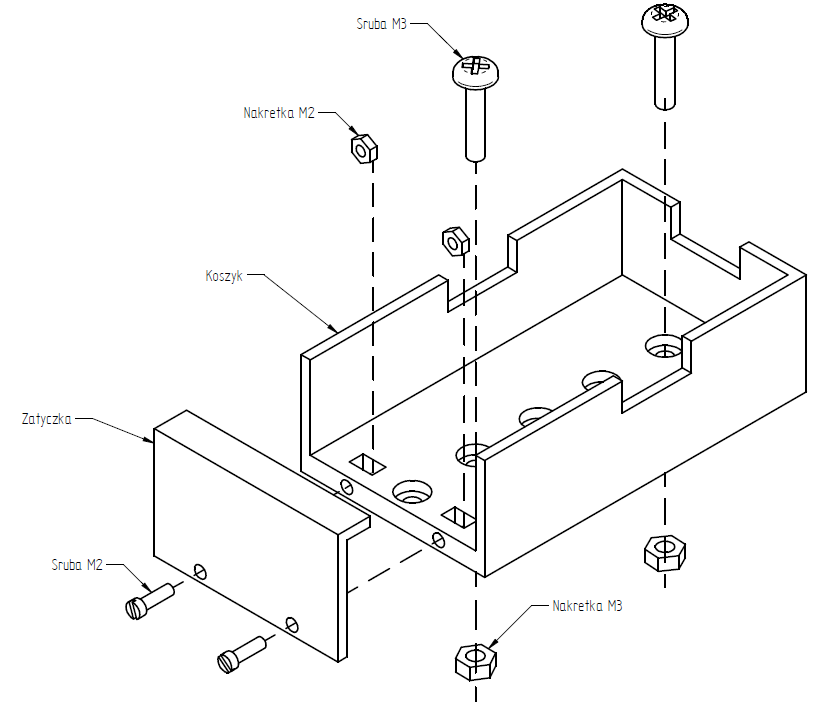
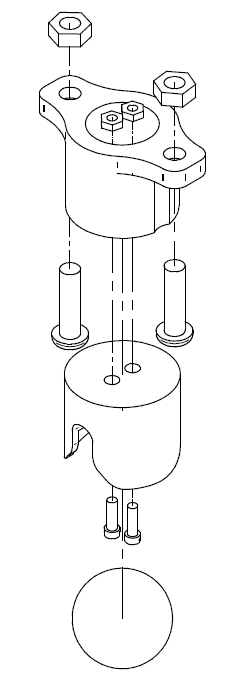
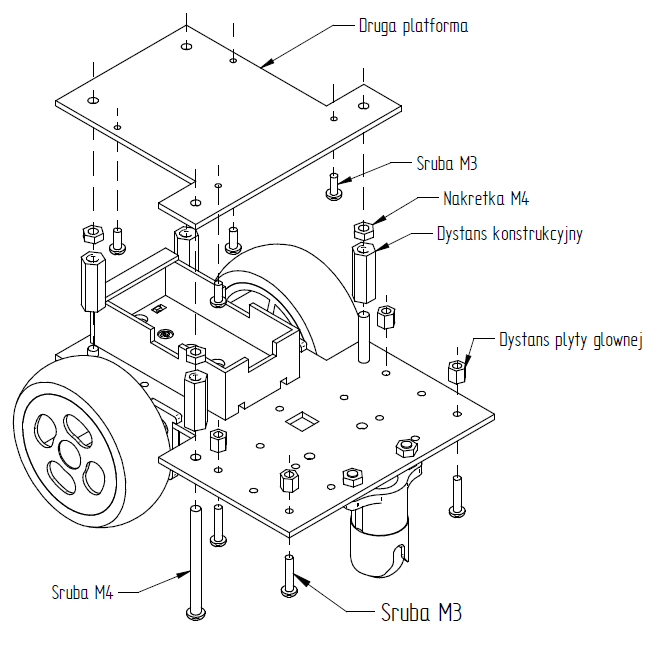
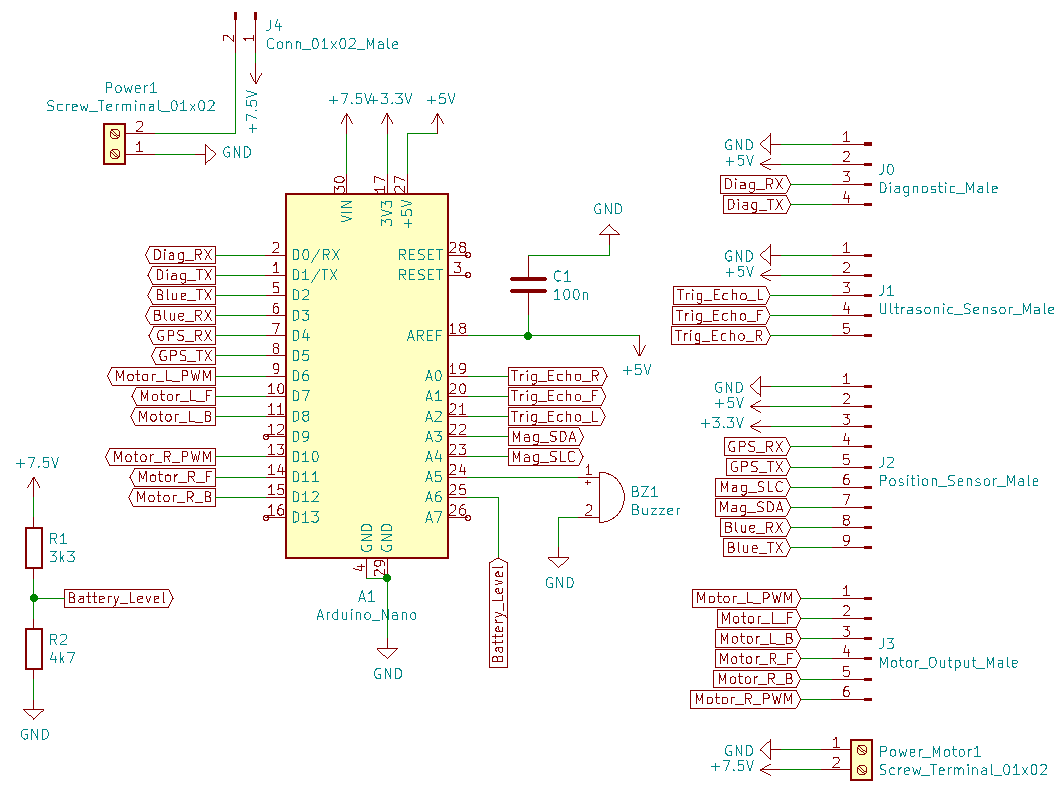
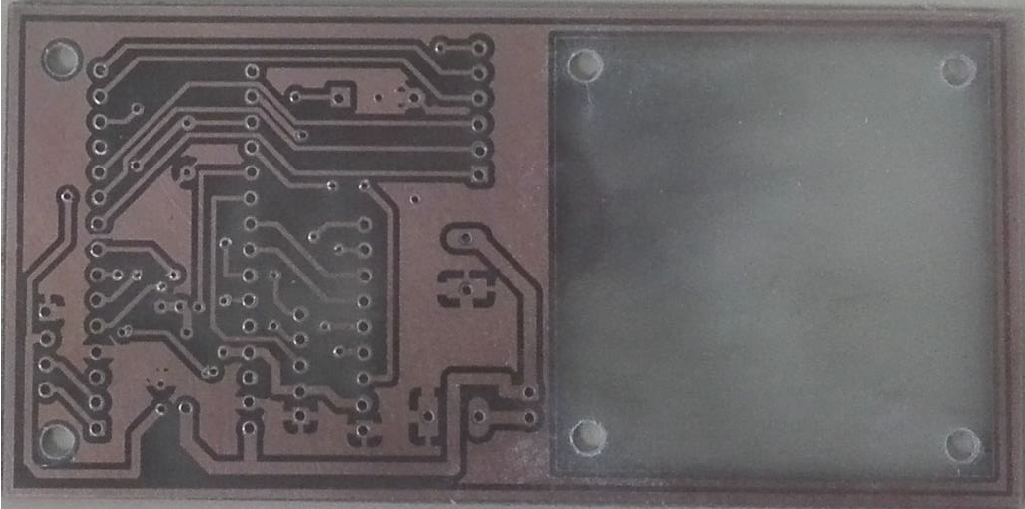
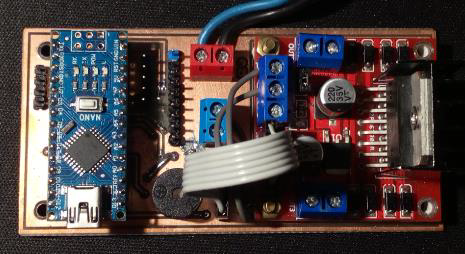
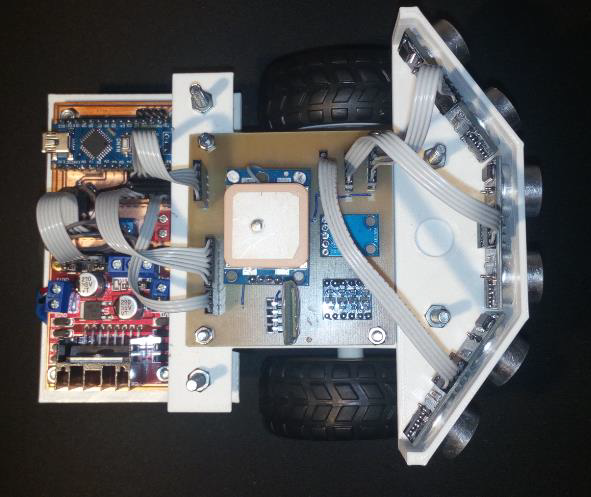
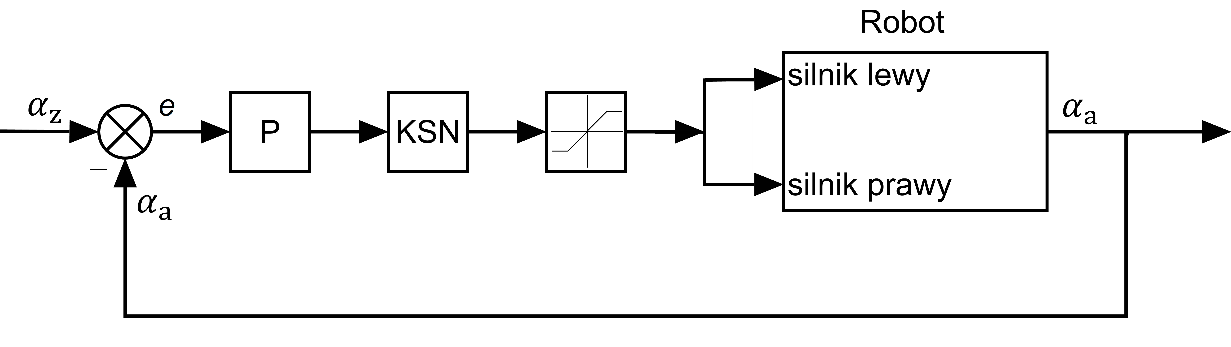
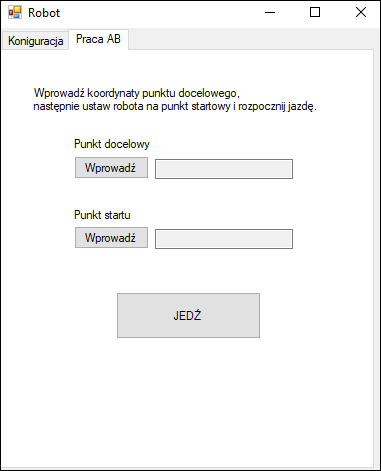
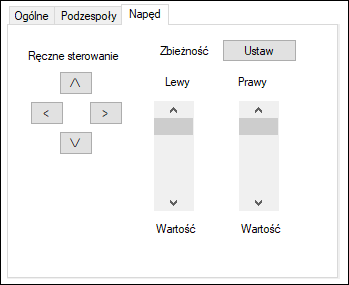
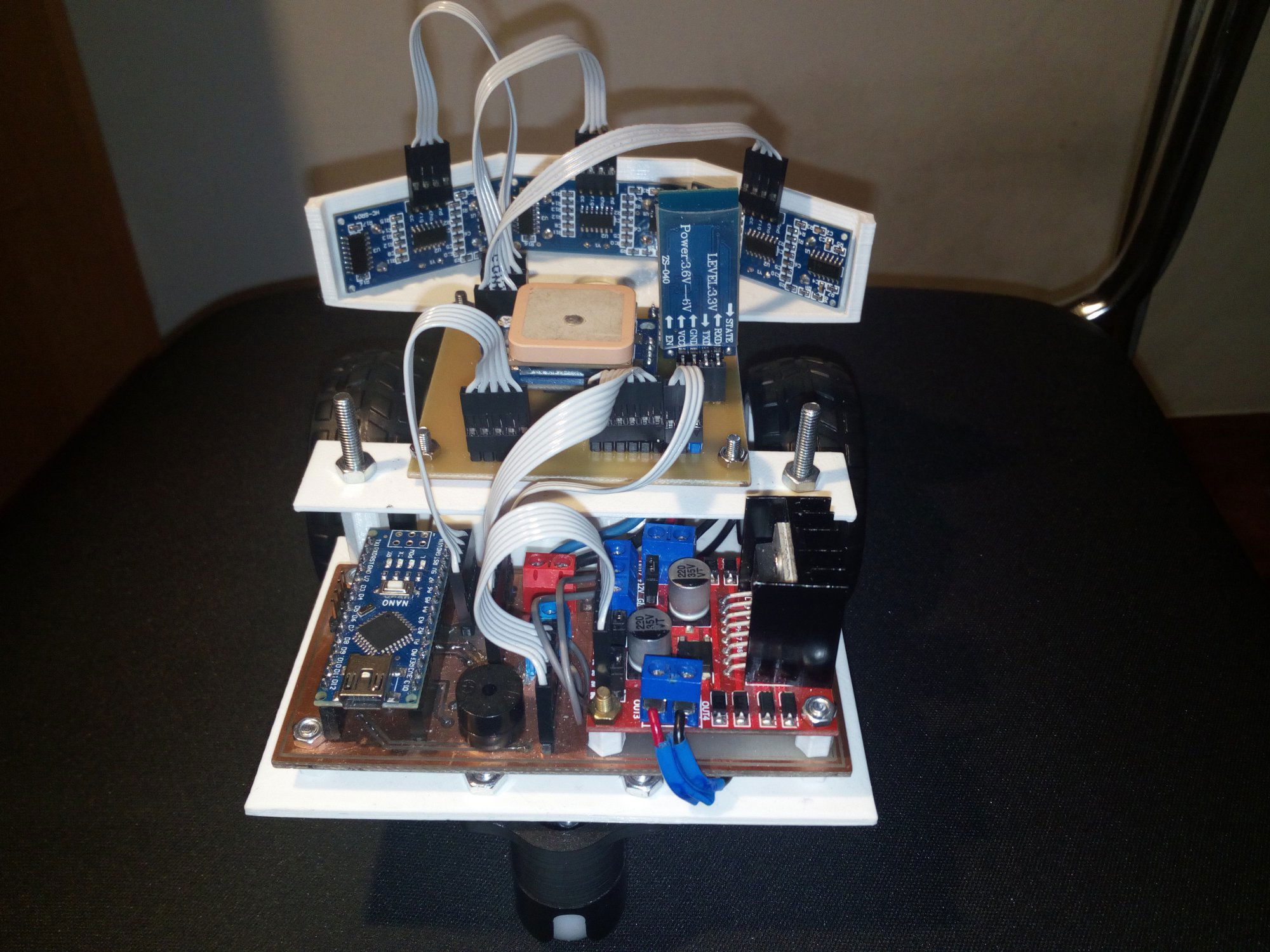
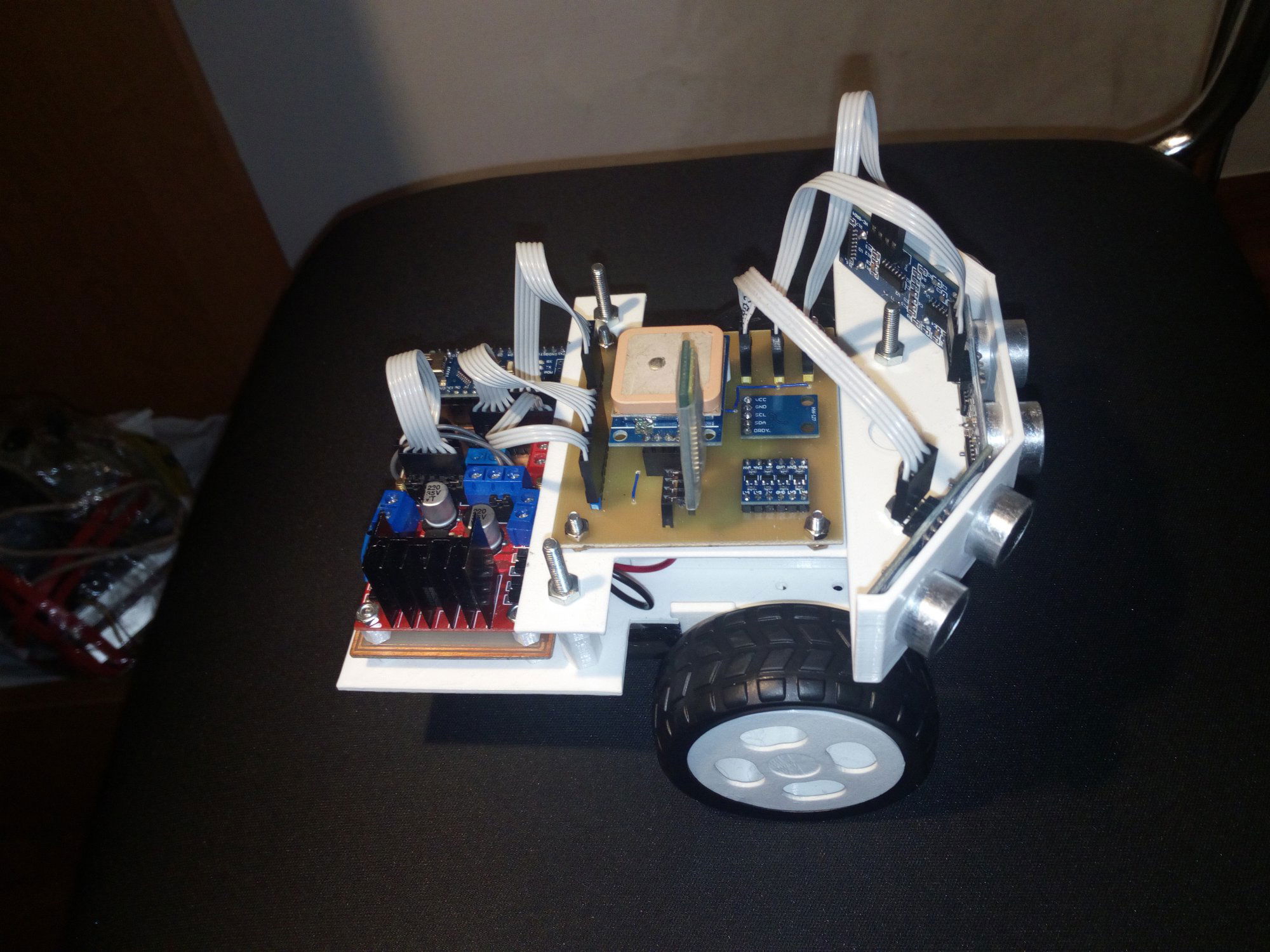
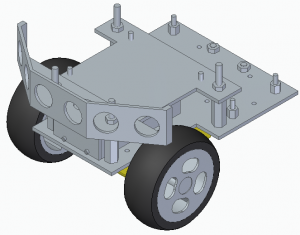
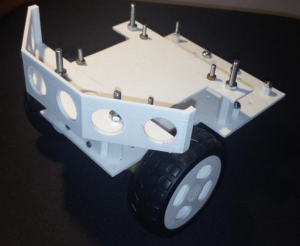
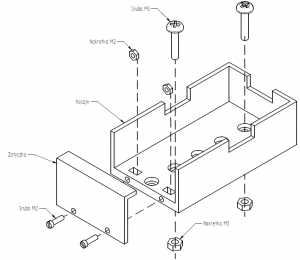
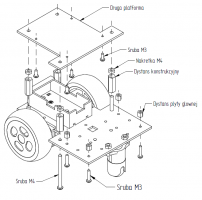
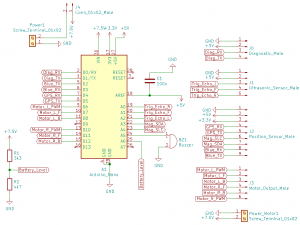
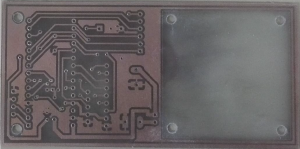
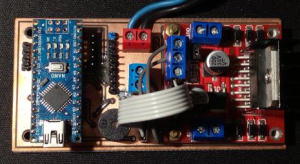
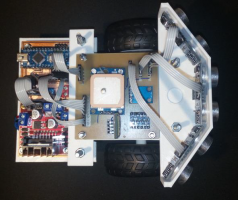
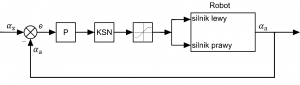
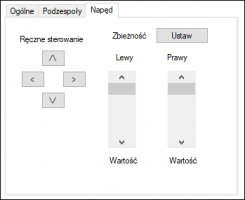
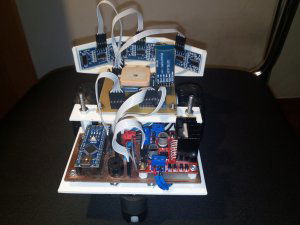
Autonomiczny robot mobilny z nawigacją GSP W życiu każdego studenta przychodzi monet, kiedy musi się spiąć i zrobić pracę inżynierską. Jako, że większość proponowanych tematów przez uczelnię nie wpadło w obszar moich zainteresowań, a już od jakiegoś czasu chciałem „pobawić się” w budowę robota z GPS to właśnie taki temat zaproponowałem promotorowi i bez problemów został zaakceptowany (kierunek – AiR). Potem jak się okazało nie był to do końca dobry pomysł z uwagi na problemu w testowaniu GPS – testy przypadły głównie na styczeń – a więc w tym roku deszcze itp. a nawigację trzeba jednak testować na dworze. To tyle tytułem wstępu a teraz do bardziej praktycznych zagadnień. Robot z założenie miał być 2 kołowy + jedno koło wleczone, posiadać moduł bluetooth do wstępnej kalibracji i wpisywaniu współrzędnych, sterowany za pomocą Arduino Nano (w tym przypadku klon), a jego zmysłami poznawania świata miał być: moduł GPS Neo-6m, magnetometr oraz 3 czujniki ultradźwiekowe z przodu do wykrywania przeszkód. Przeszukałem pełno gotowych platform mobilnych ale żadna mi do końca nie pasowała, a że od niedawna byłem właścicielem drukarki 3D to postanowiłem zaprojektować własną i wydrukować z PLA. Projekt owej platformy zrobiłem w środowisku CAD w programie Solid Edge i wyglądał tak jak poniżej. Składa się z 2 platform oraz miejsca na czujniki ultradźwiękowe: dolna na arduino, sterownik i akumulator, a górna na pozostałe podzespoły. Jak widać pokusiłem się o zamodelowanie również felg do już gotowych kół – okazało się że mają efekt „ósemkowania” co uniemożliwiało prostą jazdę. Koło wleczone zastąpiłem jednak Ball Caster'em, ponieważ te które użyłem miało straszne luzy i również powodowało samoczynną jazdę po łuku. A tak prezentuje się już wydrukowana i złożona platforma: Jako że wszystko było zamodelowane w CAD’zie to mogłem porobić rysunki złożeniowe rodem jak z sklepów meblowych (może projektowanie mechaniczne to dobry pomysł na artykuł ) Kolejnym krokiem było zrobienie elektroniki. Aby wyglądało to w miarę estetyczniej to pokusiłem się o zrobienie płytki PCB – projekt w KiCad'zie a potem termotransferem na laminat (tam gdzie Arduino to płytka dwustronna, a tam gdzie moduły jedno) Jeszcze tylko zasilanie – Li-Pol 2s firmy Redox (pomocny w ogarnięciu tego tematu był artykuł na Forbocie – wielkie dzięki za kompendium wiedzy w pigułce) i możemy zaczynać programować – a to dla mnie było największym wyzwaniem. Wrzuciłbym kod ale to jest 700 linijek napisanych raczej łopatologicznie więc tylko ja się w nim odnajduję Jak byście mieli jakieś pytania odnośnie działania jakiejś części to podrzucę i postaram się wyjaśnić. Jako, że byłem na AiR no to fajnie by było wrzucić jakiś nawet prosty regulator – zdecydowałem się na Proporcjonalny a układ regulacji wygląda następująco: (KSN – kompensacja strefy nieczułości) Działał on dosyć dobrze, im robot "był dalej" od zadanego kontu tym szybciej obracał się a im bliżej tym zwalniał, zaś przeregulowanie było znikome. Gotowy robot prezentuje się tak: Niestety wszystko nie było takie piękne i proste, a to niektóre napotkane problemy Magnetometr praktycznie nie działał. Wskazywał azymut w przedziale może z 0-15o. Powodem było pole magnetyczne wytwarzane przez magnesy silników. Google jednak nie znały odpowiedzi co zrobić z tym faktem więc testowałem po kolei różne warianty i tak o to idealnym rozwiązaniem okazało się umieszczenie silników w stalowe rurki. Z powody złych warunków na dworze testowanie robota nie było zawsze możliwe. Arduino też nie wyrabiał jak dostawał tyle danych (GPS okazał się bardzo obciążający – w momencie kiedy dostawał pakiet danych to Ardu zaczęło wariować). GPS i bluetooth nie mogły działać w tym samym momencie więc nie miałem możliwości zdalnie dowiedzenia się co robot w danej chwili „miał na myśli”. Generalnie to wszystko działało ale osobno: jak testowałem unikanie przeszkód i ustawianie się na dany kąt to była gitara. Dołożyłem do tego GPS to raz działało a raz nie – jak wspomniałem po dostaniu pakietu danych zaczynał wariować przez chwilę. W planach mam zamianę Ardu na STM32 i spróbowanie ponownie ruszyć temat. Dodatkowo napisałem prostą aplikację w C#, która komunikowała się z robotem przez bluetooth i można było łatwiej testować podzespoły i wprowadzać współrzędne. Praca została obroniona na 5 więc było warto poświęcić nad tym dużo czasu. Zapraszam do komentowania





- 9 odpowiedzi
-
- 12
-

-
- GPS
- Magnetometr
- (i 2 więcej)
-
Dzień dobry Chciałbym kupić drona mam bardzo ograniczony budżet bo tylko 450zł ale znalazłem na aliexpress , visuo xs812 tylko ze mi chodzi o model z kamerą 5MP 4K bo są też 2MP , posiada też GPS no i wifi 5G i tu mam pytanie, jesli mój telefon nie obsługuje 5G to wszystko zadziała tylko zasięg będzie mniejszy tak? Jest jeszcze visuo xs816 ale o tym modelu jeszcze nie doczytałem . Podoba mi sie model xs812 bo w tej cenie nie znalazłem nic bardziej stabilnego w locie i z dobrą kamerą a o to mi najbardziej chodzi, ma też auto powrót po utracie zasiegu i czujniki, proszę was bardzo o wasze opinnie i czy w tej cenie jest coś lepszego. Na aliexpress ten zestaw z 3 bateriami i pilotem ,opakowanie,dodatkowe smigiełka itd kosztuje 420zł . Bardzo proszę o wyrozumiałość i miłe odpowiedzi jestem zielony amator w tych tematach ale zakochałem się w dronach Pozdrawiam serdecznie
-
Witam Mam problem z modułem GPS a dokładnie z Ublox NEO-6m. Otóż po podłączeniu modułu pod Arduino UNO wgraniu biblioteki TinyGPS oraz uruchomieniu przykładu test_with_gps_device po uruchomieniu monitora portu, zamiast danych dostaję tylko gwiazdki (***). Moduł podłączam TX pin 10 VCC 5, GND. W programie testowych zmieniam dane dotyczące Baudu oraz piny niestety bez większego rezultatu. Oglądałem filmiki oraz czytałem odnośnie podłączenia tego modułu ale nic nie pomaga. Może ktoś wie co robię nie tak.
-
Witam Zwracam się z prośbą o pomoc dotyczącej robota którego właśnie tworzę. Zaczynając od początku, robot działa na Arduino UNO posiada moduł GPS, BT, kompas oraz w przyszłości będzie posiadał napęd składający się z 2 silników. Zamysł był taki aby korzystając z aplikacji Blynk (wybrałem taką ponieważ jest bardzo prosta a ja nie będę potrzebował dużo zadań wykonywanych z telefonu) poprzez moduł BT, telefon łączył się z robotem, następnie odczytał wartość GPS z robota porównał ją z GPS z telefonu następnie obliczając dystans kąt i kilka innych rzeczy rozpoczął podążać z telefonem podłączonym do robota. Niestety mam problemy z danymi które szczytuje z GPS ponieważ wyświetla mi on co tylko 0. Każdy program z osobna działa poprawnie i odczytuje poprawne wartości GPSów. Niestety podczas łączenia ich w jedno nie działa. Myślałem na początku ,że problem może być ze strony portów które nie nadążają wysyłać i odbierać dane z BT oraz z 2 GPS. Wtedy zacząłem korzystać z biblioteki ALTSerial i początkowo dało to jakiś progres jednak GPS w telefonie zaczął przypisywać wartości GPS z robota. Aktualnie mam robota który nie działa poprawnie gdy są 2 GPS podłączone i próbują odczytać dane. Oto kod : #include "TinyGPS++.h" // GPS #include "SoftwareSerial.h" #include <AltSoftSerial.h> #include <BlynkSimpleSerialBLE.h> // Biblioteka odpowiadająca za BT #include <QMC5883LCompass.h> // Compas Library #define BLYNK_PRINT Serial #define BLYNK_USE_DIRECT_CONNECT // BT #define BLYNK_PRINT BT_Serial // BT SoftwareSerial BT_Serial(2, 3); // BT podłączony do Seriala na pinach 2-RX, 3-TX SoftwareSerial GPS_Serial (10, 11); //GPS nowy Serial 10-TX, 11-RX TinyGPSPlus gps2; // GPS z robota fizyczny WidgetTerminal terminal(V2); // przypisanie terminala do V2 QMC5883LCompass compass; // deklaracja char auth[] = "ok3q9uiJKllXv9dtOR7XyewQq0EL-_H6"; // Token przypisany do aplikacji BLYNK struct GeoLoc { float szer; float dlu; }Phone,Robo; void Distance () // in KM { float X = ((Phone.szer - Robo.szer) * 6378,14 * cos(Robo.dlu)) / 360.0; float Y = ((Phone.dlu - Robo.dlu) * 6356,75) / 360.0; float X2 = X * X; float Y2 = Y * Y; float Distance = sqrt(X2 + Y2); Serial.println("Distance"); Serial.println(Distance); } //---------------------------------------------------------------------------------------------------------------------------- void Compas() { int x, y, z; // Read compass values compass.read(); // Return XYZ readings x = compass.getX(); y = compass.getY(); z = compass.getZ(); Blynk.virtualWrite(V2," X:",x ," Y:",y ," Z:",z ); } void GPS_robot() // Data GPS form robot --------------------------------------------------------------------------------- { while(GPS_Serial.available() > 0) { gps2.encode(GPS_Serial.read()); } if(gps2.location.isUpdated()) { Serial.print("Lotitude"); Serial.println((gps2.location.lat()),6 ); Serial.print("Longitude:"); Serial.println((gps2.location.lng()),6 ); Robo.szer = gps2.location.lat(); Robo.dlu = gps2.location.lng(); } } BLYNK_WRITE (V0) // GPS Stream Widget Data from Phone ------------------------------------------------------------ { GpsParam gps(param); Serial.println("Received remote GPS: "); // Print 7 decimal places for Lat Serial.print(gps.getLat(), 7); Serial.print(", "); Serial.println(gps.getLon(), 7); Phone.szer = gps.getLat(); Phone.dlu = gps.getLon(); } BLYNK_WRITE (V1) // Wirtualny przycisk -------------------------------------------------------------------------------------- { } BLYNK_WRITE (V2) // Terminal Widget ------------------------------------------------------------------------------------------ { if (String("clear") == param.asStr()) { terminal.clear (); } else if (String("compas") == param.asStr()) { Compas(); } else if (String("rob") == param.asStr()) { } } void setup() //------------------------------------------------------------------------------------------- { //Debugging Serial.begin(9600); //GPS GPS_Serial.begin(9600); //Bluetooth BT_Serial.begin(9600); Blynk.begin(BT_Serial, auth); //Terminal terminal.clear(); //Compas compass.init(); } void loop() //------------------------------------------------------------------------------------------------------- { Blynk.run(); Serial.println("dane z tele"); Serial.println(Phone.szer, 5); Serial.println(Phone.dlu, 5); Serial.println("dane z robota"); Serial.println(Robo.szer, 5); Serial.println(Robo.dlu, 5); delay (2000); Distance (); delay (2000); } Czy ktoś mógłbym pomóc mi z otrzymywaniem poprawnych danych z 2 GPS ( z telefonu oraz robota) ?
-
 Elektroniczny Multitool Jak się zaczęło? Ano zaczęło się od tego, że zanabyłem sobie hulajnogę elektryczną. Długo i sumiennie przeglądałem różne recenzje, opisy, wertowałem informacje, aż w końcu zdecydowałem się na Airwheel Z5 Strong, którą na marginesie polecam. Pomimo wielu zalet - w tym kilku rozwiązań unikalnych w tym segmencie urządzeń, jak na przykład wygodne podesty albo łatwo wymienny akumulator - ma jednak pewną niewielką wadę: brak wyświetlacza informującego na przykład o bieżącej prędkości czy o przejechanej drodze. Ponieważ od jakiegoś czasu bawię się Arduino, stwierdziłem, że stosunkowo łatwo powinno dać się skonstruować taki licznik samodzielnie - wystarczy przecież zastosować GPS, który uniezależnia mnie od rozwiązań zastosowanych w hulajnodze. Zacząłem więc powoli kolekcjonować wszystkie niezbędne komponenty. Wyświetlacz Zacząłem trochę nietypowo, bo od wyświetlacza. Zrobiłem już kilka projektów na wyświetlaczach znakowych, ale - oczywiście - nie dają one takich możliwości, jak solidny, kolorowy, a najlepiej dotykowy wyświetlacz. Mój wybór padł na dotykowy wyświetlacz 2.4", pracujący z rozdzielczością 320x240 i komunikujący się przez popularny protokół SPI. Mój wygląda nieco inaczej niż ten w sklepie, ale różnią się płytką z kontrolerem, wyświetlacz jest ten sam. Kontroler Obejrzałem sobie sporo filmików dotyczących podłączania wyświetlaczy do Arduino i uderzyło mnie to, że w większości przypadków liczba klatek na sekundę osiągała bardzo często wartości jednocyfrowe. Jest to zrozumiałe - wszelkie Uno, Leonardo, Micro i tak dalej są taktowane ze stosunkowo małymi częstotliwościami, a przynajmniej zbyt małymi, by osiągnąć zadowalające rezultaty graficzne. Dlatego tym razem porzuciłem całę rodzinę *ino na rzecz chyba nieco mniej znanego kontrolera, Teensy 3.5. Kosztuje swoje, ale dostajemy naprawdę ciężką artylerię: 120 Mhz, 512 kB Flash, 192 kB RAMu, 62 piny, zintegrowany zegar czasu rzeczywistego (trzeba go tylko zasilić bateryjką CR2032), czytnik kart microSD i oczywiście możliwość programowania przez micro USB, bez konieczności stosowania programatorów. Polecam, korzystanie z takiego kombajnu to naprawdę czysta przyjemność. GPS Ta decyzja była stosunkowo prosta, zdecydowałem się na rozwiązanie ekonomiczne i kupiłem prosty GPS komunikujący się przez UART (szeregowo). Przyznam szczerze, że po zakupie Teensy trochę szkoda było mi poświęcić taki świetny kontroler li tylko na licznik do hulajnogi. Dlatego zanabyłem jeszcze popularny czujnik pogodowy BME280 i stwierdziłem, że w czasie, gdy nie będę korzystał z urządzenia jako licznika, zrobię z niego małą stację pogodową. Na wyposażeniu urządzenia znalazł się również czujnik położenia MPU9250, bo zamierzałem napisać rejestrator pochyłości podłoża (i ewentualnie również jego jakości), ale w końcu z tego pomysłu zrezygnowałem. Być może za jakiś czas dopiszę sobie do urządzenia cyfrową poziomicę. Konstrukcja Zacząłem od płytki prototypowej, która błyskawicznie zamieniła się na totalnie zagmatwaną pajęczą sieć przewodów kydexowych. Myślałem na początku, że poprzestanę na niej, ale plątanina ta wyglądała tak dramatycznie, że z pomysłu w końcu zrezygnowałem, traktując go tylko jako prototyp. Sprawdziłem, czy wszystkie urządzenia będą pracowały prawidłowo i generalnie każdy moduł udało mi się uruchomić i pobrać z niego dane, z tym wyjątkiem, że BME280 i MPU9250 odmawiały współpracy podłączone do jednej szyny I2C. Szczęśliwie Teensy oferuje tych szyn chyba z pięć, więc przepiąłem BME na inną i wszystko wstało bez problemu. Kiedy wszystko działało, siadłem do Eagle'a i zaprojektowałem PCB, który miał zastąpić tę nieszczęsną płytkę prototypową. W Polsce jest kilka firm, które wykonują nawet pojedyncze sztuki takich płytek, a moją zamówiłem w firmie Satland Prototype. Musiałem poczekać dwa tygodnie, ale w końcu płytka doszła pocztą i mogłem zacząć lutować. Jakiś czas temu wyposażyłem się w drukarkę 3D, więc po zlutowaniu (i uruchomieniu) wszystkiego siadłem do Fusion 360 i zaprojektowałem obudowę na całe urządzenie. Zadbałem o to, żeby BME został odseparowany wewnętrzną ścianką od reszty urządzenia, bo ekran LCD potrafi się grzać i zafałszowuje odczyty. GPS zamocowałem w osobnym miejscu, wsunięty w odpowiedni slot i zabezpieczony ścianką z drugiej strony, ponieważ niestety wersja, którą kupiłem, nie posiadała żadnych otworów montażowych. Płytka z komponentami siedzi w przygotowanym na jej wymiary wgłębieniu i jest ściśnięta pomiędzy dwiema częściami obudowy, więc nie ma możliwości się przesunąć. Do tego otwór na wyświetlacz, siateczka w przedniej ściance przepuszczająca powietrze do czujnika pogodowego i tyle. Słowo komentarza, bo pewnie padnie takie pytanie: schemat dotyczy nowej wersji płytki z usuniętym radyjkiem NRF, na zdjęciu jest starsza wersja - szczegóły na końcu artykułu. Programowanie Proces programowania musiałem rozłożyć w czasie, ale projekt szedł powoli do przodu. Zacząłem od części pogodowej, ogrom miejsca w programowalnej pamięci kontrolera pozwolił mi poszaleć, więc przygotowałem sobie w C++ klasy odpowiedzialne za obsługę interfejsu użytkownika, spięcie różnych modułów w jedną całość, wyświetlanie grafiki i tak dalej. Również i tym razem dałem się ponieść - nie mogłem znaleźć w Internecie dobrego programu do generowania czcionek w formacie zrozumiałym dla biblioteki ILI9341_t3 przygotowanej przez twórcę Teensy (działa ona szybciej od regularnej biblioteki), a zależało mi na czcionce siedmiosegmentowej - takiej trochę "retro" (widać na screenach). Zapytałem więc Paula o kilka rzeczy, siadłem któregoś wieczoru i wyrzeźbiłem edytor czcionek dla ILI9341_t3. Mój prosty programik może się podobać lub nie, ale najlepszą alternatywą jaką znalazłem jest gigantyczne makro w Excelu, więc sami rozumiecie... Dużym odkryciem było dla mnie, że na platformę Arduino można już programować w Visual Studio Code - Arduino Studio jest wciąż wymagane (bo zawiera wszystkie narzędzia potrzebne do zbudowania programu dla kontrolerka), ale tak naprawdę wszystkie operacje - budowanie, wrzucanie na płytkę, monitor portu szeregowego - można już obsłużyć bezpośrednio w tym świetnym środowisku. Tylko że... niestety Teensy nie jest całkowicie zgodne z Arduino i do budowania na tę platformę potrzebny jest dodatkowy programik, Teensyduino, który nieco modyfikuje Arduino Studio i nie jest kompatybilny z VS Code. Tym niemniej, większość developmentu zrealizowałem w tym ostatnim, jedynie budując i wrzucając aplikację na urządzenie przy pomocy AS. Zastosowałem też własny mechanizm podwójnego buforowania: cały obraz buduję w RAMie i wyświetlam go hurtem w jednym kroku. Ogranicza to trochę lag związany z wyświetlaniem poszczególnych elementów, opóźnienie wciąż jest, ale jest znacznie mniej zauważalne. Kosztowało mnie to prawie połowę pamięci RAM, ale z uwagi na to, że pozostałe komponenty aplikacji prawie go nie zużywają, mogłem sobie na to pozwolić. Źródła trzymam na Gitlabie, chcecie obejrzeć - sklonujcie sobie repo. Efekt W chwili obecnej płytka w trybie stacji pogodowej wyświetla klasycznie: temperaturę, ciśnienie i wilgotność, a także wykresy: bieżący (jasna linia - jeden piksel to 15 sekund) i historia - 1h, 8h lub 24h wstecz.Tryby można przełączać po dotknięciu ekranu - pojawia się wtedy proste menu. Aplikacja wyposażona jest w wygaszacz ekranu, który zapobiega wypaleniu pikseli - szczególnie, że w trybie stacji pogodowej bardzo dużo z nich mogłoby być na to narażone. Po 30 sekundach ekran się wyłącza (wygasza), a włącza ponownie po dotknięciu. Niestety nie udało mi się wyłączyć jego podświetlenia - doczytałem, że w tym ekranie programowo nie da się tego zrobić. Szkoda. W trybie GPS wyświetlane są na razie podstawowe informacje wczytane z odbiornika: prędkość, wysokość n.p.m., kierunek jazdy, liczba satelit, z których odczytywane są dane oraz położenie geograficzne - długość i szerokość. Za jakiś czas dopiszę pewnie tryb "rowerowy", czyli przebyta droga, średnia i maksymalna prędkość i tak dalej. Aplikację mam napisaną na tyle modularnie, że teraz taki moduł mogę już sobie praktycznie niewielkim kosztem poskładać "z klocków". Problemy Człowiek uczy się na błędach, a mądry człowiek na błędach innych. Podczas rozwijania tego projektu nadziałem się na mnóstwo problemów, więc podzielę się moimi rozwiązaniami - być może komuś oszczędzi to czasu i nerwów. Po pierwsze, zasilanie - w dwóch odsłonach. Pierwsza odsłona - pierwotnie na płytce znajdowało się jeszcze radyjko NRF24, ponieważ jakiś czas temu zbudowałem sobie "satelitę" - małą płytkę z czujnikiem temperatury i wilgotności zasilaną z bateryjki CR2032: miałem nadzieję, że w trybie stacji pogodowej urządzenie będzie również ściągało informacje z tego źródła. Testy bez GPSu wypadły pozytywnie - to widać na zdjęciach - ale po podłączeniu wszystkiego i włączeniu zasilania, ekran rozbłysł na chwilę, a potem powolutku przygasł i zgasł całkowicie. Podejrzewałem od razu NRF, chciałem go rozlutować, ale w trakcie tego procesu oderwałem jeden pad na płytce, więc nie miałem już możliwości łatwego sprawdzenia, czy to on jest winien. Żeby uniknąć dalszych uszkodzeń, podrzuciłem płytkę ojcu, który w pracy ma wysokiej klasy rozlutownicę, a ja zaprojektowałem w międzyczasie drugą, tym razem już bez NRFa. Warto zawsze sprawdzić, czy uda się zasilić wszystkie komponenty - ja leniwie pociągnąłem zasilanie wszystkiego z płytki, a mogłem przecież wstawić na płytkę port microSD i pociągnąć dodatkowe ścieżki bezpośrednio z niego - wtedy obciążyłbym zasilacz (który pewnie nawet by nie sapnął), a nie samą płytkę. Druga kwestia - hulajnoga, którą kupiłem, ma w baterii wyjście USB - można (według instrukcji) doładowywać sobie na przykład komórkę (traktować akumulator jako powerbank). Również do tego portu podłączana jest latareczka, którą można sobie włączyć podczas jazdy. Niestety podczas prób terenowych okazało się, że przysiad napięcia podczas rozpędzania jest tak duży, że płytka gaśnie albo się zawiesza. Musiałem więc zasilić ją z osobnego powerbanku, w przyszłości pomyślę nad zasileniem płytki z osobnego akumulatora albo po prostu baterii. Teraz BME280 - małe ostrzeżenie. Układzik jest rewelacyjny, malutki i stosunkowo dokładny... ale się grzeje! Potrafi rozgrzać się na tyle, że zafałszowuje informacje o temperaturze o 1.5-2 stopnie. Rozwiązanie (proponowane nawet przez Boscha) polega na zmniejszeniu dokładności pomiaru (urządzenie może działać w trybie oversampling, czyli robi np. 8 pomiarów i uśrednia - należy to wyłączyć), wyłączeniu filtrowania (które również poprawia jakość pomiarów), przełączyć się w tryb "forced" - wtedy płytka robi pomiar tylko na życzenie - i ograniczyć pomiary do jednego na minutę (!). Ja nie ograniczyłem się tak bardzo, pomiary mam co 15 sekund, ale mimo wszystko układ się grzeje i na początku na wykresie widać delikatny skok temperatury, który po chwili się stabilizuje. Jest również prawdopodobne, że grzeje się nie tyle BME, co wyświetlacz - podobny problem miałem w innej stacji pogodowej z wyświetlaczem znakowym. Tam temperatura skakała do góry o kilka stopniu po uruchomieniu. Kwestia estetyki - nie zadbałem o to, żeby schować obramowanie ekranu z widocznymi ścieżkami panelu dotykowego. W innych projektach nie popełniam już tego błędu, widoczny jest sam ekran (wygląda to o niebo lepiej). Ogólnie jednak jestem zadowolony, płytka jest rozwojowa, a nowe funkcjonalności mogę dodawać programowo, więc podejrzewam, że wzbogacę ją jeszcze o kilka dodatkowych trybów pracy.
Elektroniczny Multitool Jak się zaczęło? Ano zaczęło się od tego, że zanabyłem sobie hulajnogę elektryczną. Długo i sumiennie przeglądałem różne recenzje, opisy, wertowałem informacje, aż w końcu zdecydowałem się na Airwheel Z5 Strong, którą na marginesie polecam. Pomimo wielu zalet - w tym kilku rozwiązań unikalnych w tym segmencie urządzeń, jak na przykład wygodne podesty albo łatwo wymienny akumulator - ma jednak pewną niewielką wadę: brak wyświetlacza informującego na przykład o bieżącej prędkości czy o przejechanej drodze. Ponieważ od jakiegoś czasu bawię się Arduino, stwierdziłem, że stosunkowo łatwo powinno dać się skonstruować taki licznik samodzielnie - wystarczy przecież zastosować GPS, który uniezależnia mnie od rozwiązań zastosowanych w hulajnodze. Zacząłem więc powoli kolekcjonować wszystkie niezbędne komponenty. Wyświetlacz Zacząłem trochę nietypowo, bo od wyświetlacza. Zrobiłem już kilka projektów na wyświetlaczach znakowych, ale - oczywiście - nie dają one takich możliwości, jak solidny, kolorowy, a najlepiej dotykowy wyświetlacz. Mój wybór padł na dotykowy wyświetlacz 2.4", pracujący z rozdzielczością 320x240 i komunikujący się przez popularny protokół SPI. Mój wygląda nieco inaczej niż ten w sklepie, ale różnią się płytką z kontrolerem, wyświetlacz jest ten sam. Kontroler Obejrzałem sobie sporo filmików dotyczących podłączania wyświetlaczy do Arduino i uderzyło mnie to, że w większości przypadków liczba klatek na sekundę osiągała bardzo często wartości jednocyfrowe. Jest to zrozumiałe - wszelkie Uno, Leonardo, Micro i tak dalej są taktowane ze stosunkowo małymi częstotliwościami, a przynajmniej zbyt małymi, by osiągnąć zadowalające rezultaty graficzne. Dlatego tym razem porzuciłem całę rodzinę *ino na rzecz chyba nieco mniej znanego kontrolera, Teensy 3.5. Kosztuje swoje, ale dostajemy naprawdę ciężką artylerię: 120 Mhz, 512 kB Flash, 192 kB RAMu, 62 piny, zintegrowany zegar czasu rzeczywistego (trzeba go tylko zasilić bateryjką CR2032), czytnik kart microSD i oczywiście możliwość programowania przez micro USB, bez konieczności stosowania programatorów. Polecam, korzystanie z takiego kombajnu to naprawdę czysta przyjemność. GPS Ta decyzja była stosunkowo prosta, zdecydowałem się na rozwiązanie ekonomiczne i kupiłem prosty GPS komunikujący się przez UART (szeregowo). Przyznam szczerze, że po zakupie Teensy trochę szkoda było mi poświęcić taki świetny kontroler li tylko na licznik do hulajnogi. Dlatego zanabyłem jeszcze popularny czujnik pogodowy BME280 i stwierdziłem, że w czasie, gdy nie będę korzystał z urządzenia jako licznika, zrobię z niego małą stację pogodową. Na wyposażeniu urządzenia znalazł się również czujnik położenia MPU9250, bo zamierzałem napisać rejestrator pochyłości podłoża (i ewentualnie również jego jakości), ale w końcu z tego pomysłu zrezygnowałem. Być może za jakiś czas dopiszę sobie do urządzenia cyfrową poziomicę. Konstrukcja Zacząłem od płytki prototypowej, która błyskawicznie zamieniła się na totalnie zagmatwaną pajęczą sieć przewodów kydexowych. Myślałem na początku, że poprzestanę na niej, ale plątanina ta wyglądała tak dramatycznie, że z pomysłu w końcu zrezygnowałem, traktując go tylko jako prototyp. Sprawdziłem, czy wszystkie urządzenia będą pracowały prawidłowo i generalnie każdy moduł udało mi się uruchomić i pobrać z niego dane, z tym wyjątkiem, że BME280 i MPU9250 odmawiały współpracy podłączone do jednej szyny I2C. Szczęśliwie Teensy oferuje tych szyn chyba z pięć, więc przepiąłem BME na inną i wszystko wstało bez problemu. Kiedy wszystko działało, siadłem do Eagle'a i zaprojektowałem PCB, który miał zastąpić tę nieszczęsną płytkę prototypową. W Polsce jest kilka firm, które wykonują nawet pojedyncze sztuki takich płytek, a moją zamówiłem w firmie Satland Prototype. Musiałem poczekać dwa tygodnie, ale w końcu płytka doszła pocztą i mogłem zacząć lutować. Jakiś czas temu wyposażyłem się w drukarkę 3D, więc po zlutowaniu (i uruchomieniu) wszystkiego siadłem do Fusion 360 i zaprojektowałem obudowę na całe urządzenie. Zadbałem o to, żeby BME został odseparowany wewnętrzną ścianką od reszty urządzenia, bo ekran LCD potrafi się grzać i zafałszowuje odczyty. GPS zamocowałem w osobnym miejscu, wsunięty w odpowiedni slot i zabezpieczony ścianką z drugiej strony, ponieważ niestety wersja, którą kupiłem, nie posiadała żadnych otworów montażowych. Płytka z komponentami siedzi w przygotowanym na jej wymiary wgłębieniu i jest ściśnięta pomiędzy dwiema częściami obudowy, więc nie ma możliwości się przesunąć. Do tego otwór na wyświetlacz, siateczka w przedniej ściance przepuszczająca powietrze do czujnika pogodowego i tyle. Słowo komentarza, bo pewnie padnie takie pytanie: schemat dotyczy nowej wersji płytki z usuniętym radyjkiem NRF, na zdjęciu jest starsza wersja - szczegóły na końcu artykułu. Programowanie Proces programowania musiałem rozłożyć w czasie, ale projekt szedł powoli do przodu. Zacząłem od części pogodowej, ogrom miejsca w programowalnej pamięci kontrolera pozwolił mi poszaleć, więc przygotowałem sobie w C++ klasy odpowiedzialne za obsługę interfejsu użytkownika, spięcie różnych modułów w jedną całość, wyświetlanie grafiki i tak dalej. Również i tym razem dałem się ponieść - nie mogłem znaleźć w Internecie dobrego programu do generowania czcionek w formacie zrozumiałym dla biblioteki ILI9341_t3 przygotowanej przez twórcę Teensy (działa ona szybciej od regularnej biblioteki), a zależało mi na czcionce siedmiosegmentowej - takiej trochę "retro" (widać na screenach). Zapytałem więc Paula o kilka rzeczy, siadłem któregoś wieczoru i wyrzeźbiłem edytor czcionek dla ILI9341_t3. Mój prosty programik może się podobać lub nie, ale najlepszą alternatywą jaką znalazłem jest gigantyczne makro w Excelu, więc sami rozumiecie... Dużym odkryciem było dla mnie, że na platformę Arduino można już programować w Visual Studio Code - Arduino Studio jest wciąż wymagane (bo zawiera wszystkie narzędzia potrzebne do zbudowania programu dla kontrolerka), ale tak naprawdę wszystkie operacje - budowanie, wrzucanie na płytkę, monitor portu szeregowego - można już obsłużyć bezpośrednio w tym świetnym środowisku. Tylko że... niestety Teensy nie jest całkowicie zgodne z Arduino i do budowania na tę platformę potrzebny jest dodatkowy programik, Teensyduino, który nieco modyfikuje Arduino Studio i nie jest kompatybilny z VS Code. Tym niemniej, większość developmentu zrealizowałem w tym ostatnim, jedynie budując i wrzucając aplikację na urządzenie przy pomocy AS. Zastosowałem też własny mechanizm podwójnego buforowania: cały obraz buduję w RAMie i wyświetlam go hurtem w jednym kroku. Ogranicza to trochę lag związany z wyświetlaniem poszczególnych elementów, opóźnienie wciąż jest, ale jest znacznie mniej zauważalne. Kosztowało mnie to prawie połowę pamięci RAM, ale z uwagi na to, że pozostałe komponenty aplikacji prawie go nie zużywają, mogłem sobie na to pozwolić. Źródła trzymam na Gitlabie, chcecie obejrzeć - sklonujcie sobie repo. Efekt W chwili obecnej płytka w trybie stacji pogodowej wyświetla klasycznie: temperaturę, ciśnienie i wilgotność, a także wykresy: bieżący (jasna linia - jeden piksel to 15 sekund) i historia - 1h, 8h lub 24h wstecz.Tryby można przełączać po dotknięciu ekranu - pojawia się wtedy proste menu. Aplikacja wyposażona jest w wygaszacz ekranu, który zapobiega wypaleniu pikseli - szczególnie, że w trybie stacji pogodowej bardzo dużo z nich mogłoby być na to narażone. Po 30 sekundach ekran się wyłącza (wygasza), a włącza ponownie po dotknięciu. Niestety nie udało mi się wyłączyć jego podświetlenia - doczytałem, że w tym ekranie programowo nie da się tego zrobić. Szkoda. W trybie GPS wyświetlane są na razie podstawowe informacje wczytane z odbiornika: prędkość, wysokość n.p.m., kierunek jazdy, liczba satelit, z których odczytywane są dane oraz położenie geograficzne - długość i szerokość. Za jakiś czas dopiszę pewnie tryb "rowerowy", czyli przebyta droga, średnia i maksymalna prędkość i tak dalej. Aplikację mam napisaną na tyle modularnie, że teraz taki moduł mogę już sobie praktycznie niewielkim kosztem poskładać "z klocków". Problemy Człowiek uczy się na błędach, a mądry człowiek na błędach innych. Podczas rozwijania tego projektu nadziałem się na mnóstwo problemów, więc podzielę się moimi rozwiązaniami - być może komuś oszczędzi to czasu i nerwów. Po pierwsze, zasilanie - w dwóch odsłonach. Pierwsza odsłona - pierwotnie na płytce znajdowało się jeszcze radyjko NRF24, ponieważ jakiś czas temu zbudowałem sobie "satelitę" - małą płytkę z czujnikiem temperatury i wilgotności zasilaną z bateryjki CR2032: miałem nadzieję, że w trybie stacji pogodowej urządzenie będzie również ściągało informacje z tego źródła. Testy bez GPSu wypadły pozytywnie - to widać na zdjęciach - ale po podłączeniu wszystkiego i włączeniu zasilania, ekran rozbłysł na chwilę, a potem powolutku przygasł i zgasł całkowicie. Podejrzewałem od razu NRF, chciałem go rozlutować, ale w trakcie tego procesu oderwałem jeden pad na płytce, więc nie miałem już możliwości łatwego sprawdzenia, czy to on jest winien. Żeby uniknąć dalszych uszkodzeń, podrzuciłem płytkę ojcu, który w pracy ma wysokiej klasy rozlutownicę, a ja zaprojektowałem w międzyczasie drugą, tym razem już bez NRFa. Warto zawsze sprawdzić, czy uda się zasilić wszystkie komponenty - ja leniwie pociągnąłem zasilanie wszystkiego z płytki, a mogłem przecież wstawić na płytkę port microSD i pociągnąć dodatkowe ścieżki bezpośrednio z niego - wtedy obciążyłbym zasilacz (który pewnie nawet by nie sapnął), a nie samą płytkę. Druga kwestia - hulajnoga, którą kupiłem, ma w baterii wyjście USB - można (według instrukcji) doładowywać sobie na przykład komórkę (traktować akumulator jako powerbank). Również do tego portu podłączana jest latareczka, którą można sobie włączyć podczas jazdy. Niestety podczas prób terenowych okazało się, że przysiad napięcia podczas rozpędzania jest tak duży, że płytka gaśnie albo się zawiesza. Musiałem więc zasilić ją z osobnego powerbanku, w przyszłości pomyślę nad zasileniem płytki z osobnego akumulatora albo po prostu baterii. Teraz BME280 - małe ostrzeżenie. Układzik jest rewelacyjny, malutki i stosunkowo dokładny... ale się grzeje! Potrafi rozgrzać się na tyle, że zafałszowuje informacje o temperaturze o 1.5-2 stopnie. Rozwiązanie (proponowane nawet przez Boscha) polega na zmniejszeniu dokładności pomiaru (urządzenie może działać w trybie oversampling, czyli robi np. 8 pomiarów i uśrednia - należy to wyłączyć), wyłączeniu filtrowania (które również poprawia jakość pomiarów), przełączyć się w tryb "forced" - wtedy płytka robi pomiar tylko na życzenie - i ograniczyć pomiary do jednego na minutę (!). Ja nie ograniczyłem się tak bardzo, pomiary mam co 15 sekund, ale mimo wszystko układ się grzeje i na początku na wykresie widać delikatny skok temperatury, który po chwili się stabilizuje. Jest również prawdopodobne, że grzeje się nie tyle BME, co wyświetlacz - podobny problem miałem w innej stacji pogodowej z wyświetlaczem znakowym. Tam temperatura skakała do góry o kilka stopniu po uruchomieniu. Kwestia estetyki - nie zadbałem o to, żeby schować obramowanie ekranu z widocznymi ścieżkami panelu dotykowego. W innych projektach nie popełniam już tego błędu, widoczny jest sam ekran (wygląda to o niebo lepiej). Ogólnie jednak jestem zadowolony, płytka jest rozwojowa, a nowe funkcjonalności mogę dodawać programowo, więc podejrzewam, że wzbogacę ją jeszcze o kilka dodatkowych trybów pracy.