Przeszukaj forum
Pokazywanie wyników dla tagów 'Bluethoot'.
Znaleziono 6 wyników
-
Cześć, Zwracam się do Was z pytaniem - czy ktoś spotkał się z tym, że musiał usunąć łączność Bluetooth i wifi w konsoli PS3 slim? Jest jeden mikroukład, który odpowiada za obie sieci, wpadłem na pomysł jego wylutowania, ale nie wiem czy nie zakłóci to pracy konsoli.. sprzęt trafił do mojego serwisu, niestety nigdy tego nie robiłem, a chciałbym się tego nauczyć. Będę bardzo wdzięczny za wszystkie odpowiedzi pozdrawiam serdecznie !
-
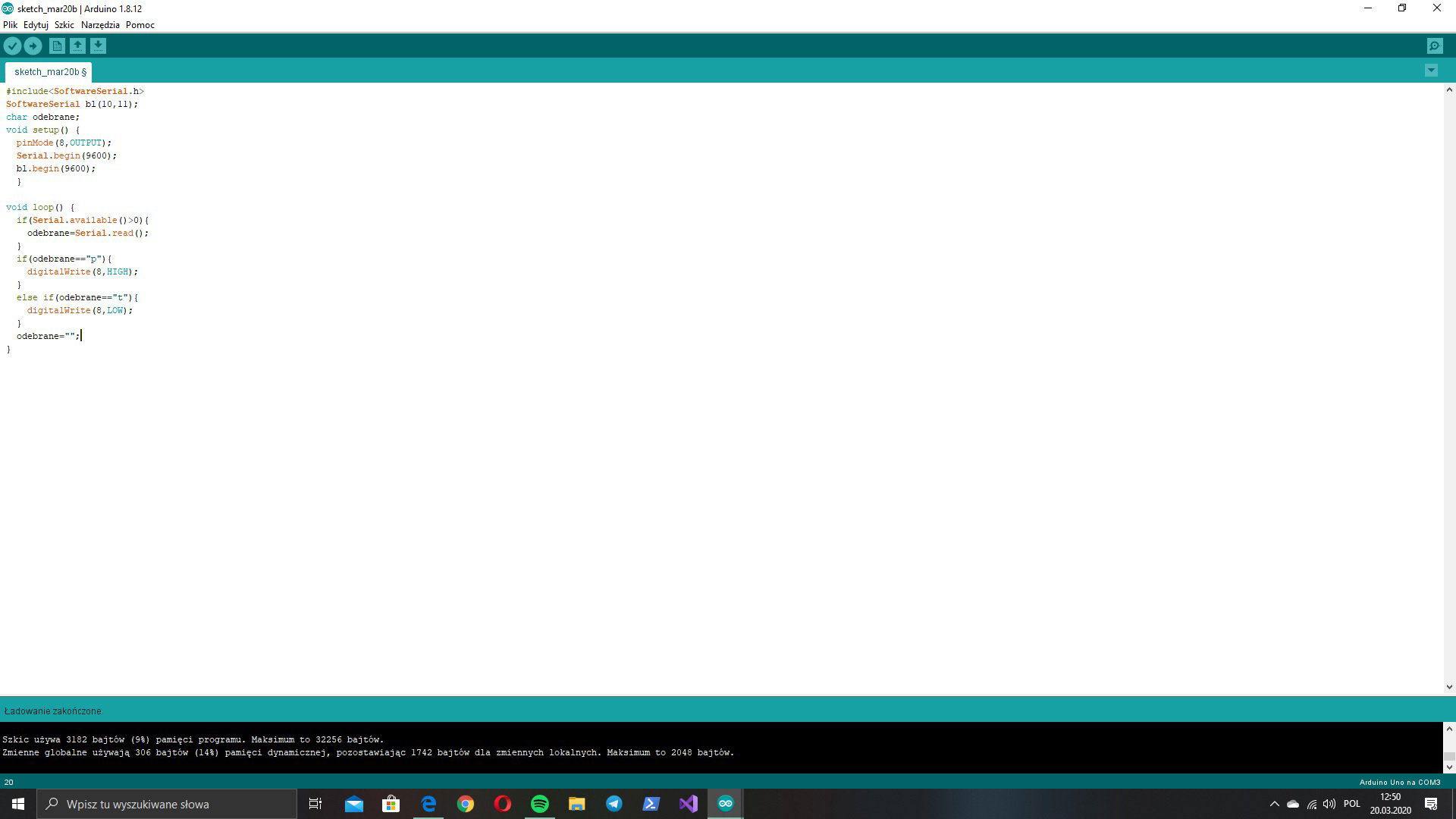
Witam serdecznie, chciałem zbudować mały pojazd, którym mógłbym sterować za pomocą telefonu. Przed złożeniem sprawdziłem czy wszystko działa i przy próbie komunikacji z telefonem potrafiłem sterować diodą (tzn. włączać i wyłączać) i wszystko działało. Niestety, po złożeniu pojazdu, silniki nie reagowały na polecenia przesyłane przez bluetooth, odłączyłem moduł i znowu spróbowałem sterować sama dioda, jednak tym razem komunikacja nie przebiegła pomyślnie. Mam napisany taki krótki program, oraz aplikacje i nie wiem w czym jest problem, więc proszę o pomoc


-

Czołg Bluetooth - problem z zasilaniem i sterownikiem silników
Cinek97 opublikował temat w Arduino i ESP
Dobry wieczór, Jestem "świeży" w sprawach programowania kontrolerów takich jak arduino, ale musiałem zrobić projekt na uczelnie. Wybrałem sobie sterowany przez moduł bluethooth XM-15 czołg. Podłączyłem wszystko z lekką pomocą stworzyłem połączenie z telefonem, przy użyciu terminala arduino "odpowiadało mi". Więc dodałem bibliotekę do silników dodałem kilka linijek kodu i wtedy zaczął się problem. Używam shielda z L293D i póki arduino jest połączone z komputerem czołg się porusza, ale jeśli podepnę zasilanie do złącza DC, nic nie działa. Używam Arduino Leonardo, a moduł bluethooth jest połączony do pinów 10,11. Czy to wina płytki czy coś w kodzie mam nie tak? Drugie pytanie czy da się zamiast terminala sterować za pomocą "gotowych kontrolerów" z google marketu. Poniżej kod programu: #include <SoftwareSerial.h> #include <MotorDriver.h> //Deklaracja portu szeregowego dla Bluetootha SoftwareSerial Bluetooth(10, 11); //Utworz instancje Bluetooth 10-RX 11-TX int buffer_in[200]; int i=0; int BluetoothDane; //do zmiennej int będą zapisywane odebrane dane MotorDriver m; int jade=0; void setup() { //i=0; // jade=0;//uruchomienie transmisji z terminalem while(!Serial); Serial.begin(9600); Bluetooth.begin(9600); //uruchom SerialSoftware z prędkością 9600 baud //Serial.println("Polaczyles sie z modulem Bluetooth czolgiem"); // digitalWrite(13,LOW); } void loop() { if (Bluetooth.available()) //Jeśli są jakieś dane { i=0; while (Bluetooth.available()>0) //Odczytujemy dane z bluetooth aż odczytamy wszystko { buffer_in[i]=Bluetooth.read(); //kopiuje dane z bluetooth do bufora i++; } digitalWrite (13,HIGH); Serial.println("Odebrano =\n"); Serial.print(i); //Serial.print("Zawartosc bufora\n"); for(int j=0;j<i-5;j++) Serial.println(buffer_in[j]); Serial.print("Koniec bufora\n"); if (i>0) //sprawdzamy czy cokolwiek odebraliśmy { //jesli tak to sprawdzamy co w buforze if (buffer_in[0]==1) { Serial.println("jade do przodu"); m.motor(1,FORWARD,255); m.motor(4,FORWARD,255); } if (buffer_in[0]==2) { Serial.println("jade do tylu"); m.motor(1,BACKWARD,255); m.motor(4,BACKWARD,255); } if (buffer_in[0]==3) { Serial.println("prawo"); m.motor(1,FORWARD,255);; m.motor(4,BRAKE,0); } if (buffer_in[0]==4) { Serial.println("lewo"); m.motor(4,FORWARD,255); m.motor(1,BRAKE,0); } if (buffer_in[0]==5) { Serial.println("Stop"); m.motor(1,BRAKE,0); m.motor(4,BRAKE,0); } //jak już sprawdzilismy co w buforze to trzeba go wyczyscic // i w następnym przebiegu petli znowu czekamy na coś co przyjdzie z blue memset(buffer_in, 0, sizeof(buffer_in)); } delay(1); //odczekaj 1ms } } -
Witam Zwracam się z prośbą o pomoc dotyczącej robota którego właśnie tworzę. Zaczynając od początku, robot działa na Arduino UNO posiada moduł GPS, BT, kompas oraz w przyszłości będzie posiadał napęd składający się z 2 silników. Zamysł był taki aby korzystając z aplikacji Blynk (wybrałem taką ponieważ jest bardzo prosta a ja nie będę potrzebował dużo zadań wykonywanych z telefonu) poprzez moduł BT, telefon łączył się z robotem, następnie odczytał wartość GPS z robota porównał ją z GPS z telefonu następnie obliczając dystans kąt i kilka innych rzeczy rozpoczął podążać z telefonem podłączonym do robota. Niestety mam problemy z danymi które szczytuje z GPS ponieważ wyświetla mi on co tylko 0. Każdy program z osobna działa poprawnie i odczytuje poprawne wartości GPSów. Niestety podczas łączenia ich w jedno nie działa. Myślałem na początku ,że problem może być ze strony portów które nie nadążają wysyłać i odbierać dane z BT oraz z 2 GPS. Wtedy zacząłem korzystać z biblioteki ALTSerial i początkowo dało to jakiś progres jednak GPS w telefonie zaczął przypisywać wartości GPS z robota. Aktualnie mam robota który nie działa poprawnie gdy są 2 GPS podłączone i próbują odczytać dane. Oto kod : #include "TinyGPS++.h" // GPS #include "SoftwareSerial.h" #include <AltSoftSerial.h> #include <BlynkSimpleSerialBLE.h> // Biblioteka odpowiadająca za BT #include <QMC5883LCompass.h> // Compas Library #define BLYNK_PRINT Serial #define BLYNK_USE_DIRECT_CONNECT // BT #define BLYNK_PRINT BT_Serial // BT SoftwareSerial BT_Serial(2, 3); // BT podłączony do Seriala na pinach 2-RX, 3-TX SoftwareSerial GPS_Serial (10, 11); //GPS nowy Serial 10-TX, 11-RX TinyGPSPlus gps2; // GPS z robota fizyczny WidgetTerminal terminal(V2); // przypisanie terminala do V2 QMC5883LCompass compass; // deklaracja char auth[] = "ok3q9uiJKllXv9dtOR7XyewQq0EL-_H6"; // Token przypisany do aplikacji BLYNK struct GeoLoc { float szer; float dlu; }Phone,Robo; void Distance () // in KM { float X = ((Phone.szer - Robo.szer) * 6378,14 * cos(Robo.dlu)) / 360.0; float Y = ((Phone.dlu - Robo.dlu) * 6356,75) / 360.0; float X2 = X * X; float Y2 = Y * Y; float Distance = sqrt(X2 + Y2); Serial.println("Distance"); Serial.println(Distance); } //---------------------------------------------------------------------------------------------------------------------------- void Compas() { int x, y, z; // Read compass values compass.read(); // Return XYZ readings x = compass.getX(); y = compass.getY(); z = compass.getZ(); Blynk.virtualWrite(V2," X:",x ," Y:",y ," Z:",z ); } void GPS_robot() // Data GPS form robot --------------------------------------------------------------------------------- { while(GPS_Serial.available() > 0) { gps2.encode(GPS_Serial.read()); } if(gps2.location.isUpdated()) { Serial.print("Lotitude"); Serial.println((gps2.location.lat()),6 ); Serial.print("Longitude:"); Serial.println((gps2.location.lng()),6 ); Robo.szer = gps2.location.lat(); Robo.dlu = gps2.location.lng(); } } BLYNK_WRITE (V0) // GPS Stream Widget Data from Phone ------------------------------------------------------------ { GpsParam gps(param); Serial.println("Received remote GPS: "); // Print 7 decimal places for Lat Serial.print(gps.getLat(), 7); Serial.print(", "); Serial.println(gps.getLon(), 7); Phone.szer = gps.getLat(); Phone.dlu = gps.getLon(); } BLYNK_WRITE (V1) // Wirtualny przycisk -------------------------------------------------------------------------------------- { } BLYNK_WRITE (V2) // Terminal Widget ------------------------------------------------------------------------------------------ { if (String("clear") == param.asStr()) { terminal.clear (); } else if (String("compas") == param.asStr()) { Compas(); } else if (String("rob") == param.asStr()) { } } void setup() //------------------------------------------------------------------------------------------- { //Debugging Serial.begin(9600); //GPS GPS_Serial.begin(9600); //Bluetooth BT_Serial.begin(9600); Blynk.begin(BT_Serial, auth); //Terminal terminal.clear(); //Compas compass.init(); } void loop() //------------------------------------------------------------------------------------------------------- { Blynk.run(); Serial.println("dane z tele"); Serial.println(Phone.szer, 5); Serial.println(Phone.dlu, 5); Serial.println("dane z robota"); Serial.println(Robo.szer, 5); Serial.println(Robo.dlu, 5); delay (2000); Distance (); delay (2000); } Czy ktoś mógłbym pomóc mi z otrzymywaniem poprawnych danych z 2 GPS ( z telefonu oraz robota) ?
-
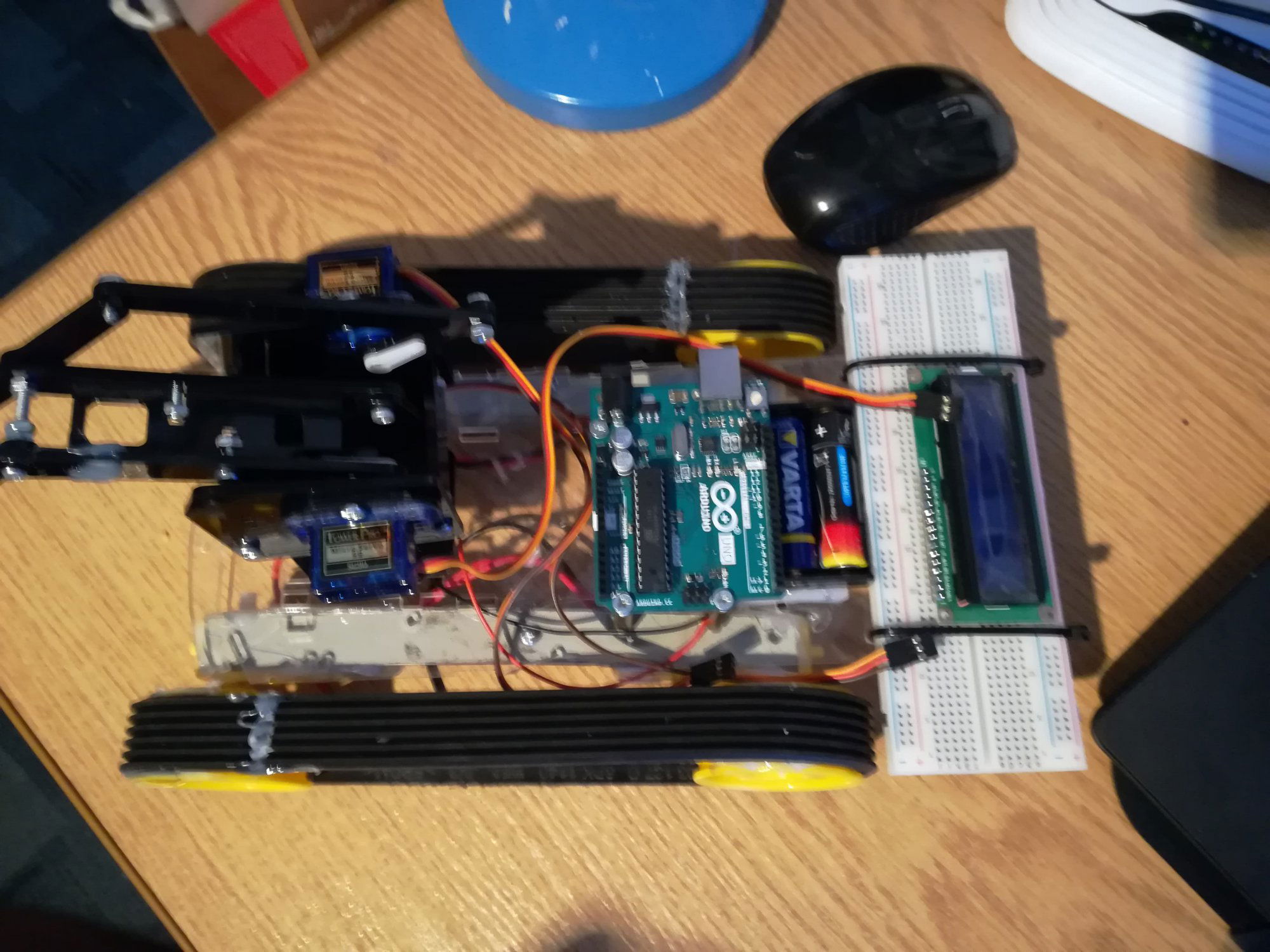
Witam, razem z kolegami ze studiów w ramach projektu budujemy auto z ramieniem robota sterowane przez bluetooth. Całość będzie oparta na arduino UNO Rev3 (zdjęcie modelu w załączniku). I z związku z tym chcemy zakupić sterownik do silników do którego będziemy mogli podpiąć 4 silniki DC (po 2 silniki połączymy szeregowo po lewej jak i prawej stronie aby było możliwie skręcanie, przez co potrzebujemy 2 wejść) oraz 4 serwomechanizmy. I własnie chciałbym dostać od was radę jakiego dokładnie sterownika powinniśmy się zaopatrzyć. Oczywiście już się oglądaliśmy za konkretnymi przykładami jednakże chcieliśmy przed dokonaniem zakupu doradzić się bardziej doświadczonych osób. Z góry dziękuję za każdą pomoc z waszej strony.

-
Witam. Przepraszam za niejasny tytuł. Zrobiłem program (używając Arduino Uno i modułu bluethooth HC-06) który ma wyświetlać w konsoli liczby, które prześle przez Bluethooth. Problem polega na tym, że czasem zamiast liczb które chce przesłać pojawiają się dziwne znaki. Liczby muszą być przechowywane w Stringu. Jak to naprawić? #include <SoftwareSerial.h> SoftwareSerial BT(0, 1); void setup() { BT.begin(9600); } String liczba[15]; char a[6]; void loop() { if (BT.available()) { liczba[1]=BT.readStringUntil('\n'); BT.println(liczba[1]); delay(500); } }