Przeszukaj forum
Pokazywanie wyników dla tagów 'pomoc'.
Znaleziono 32 wyników
-
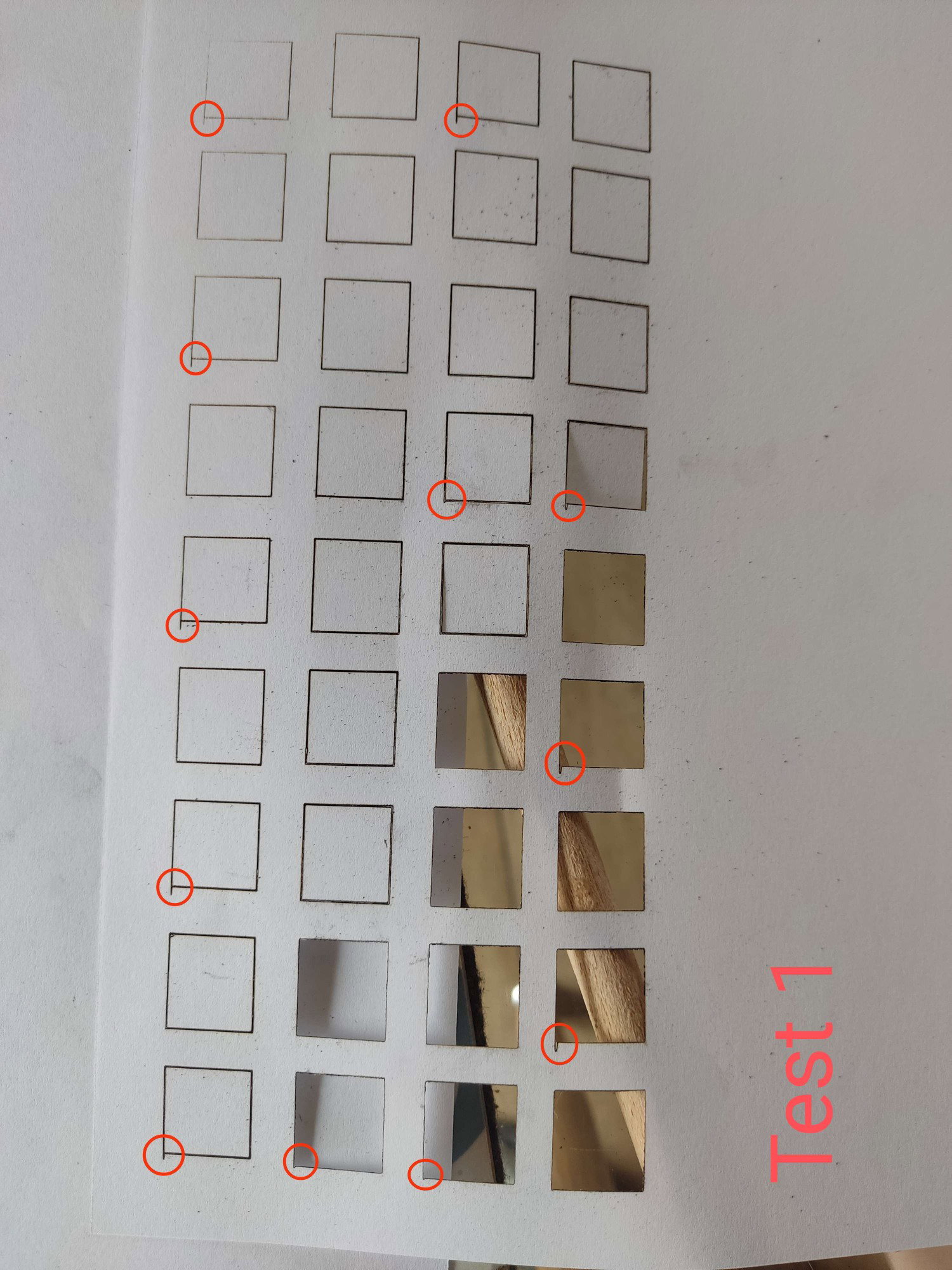
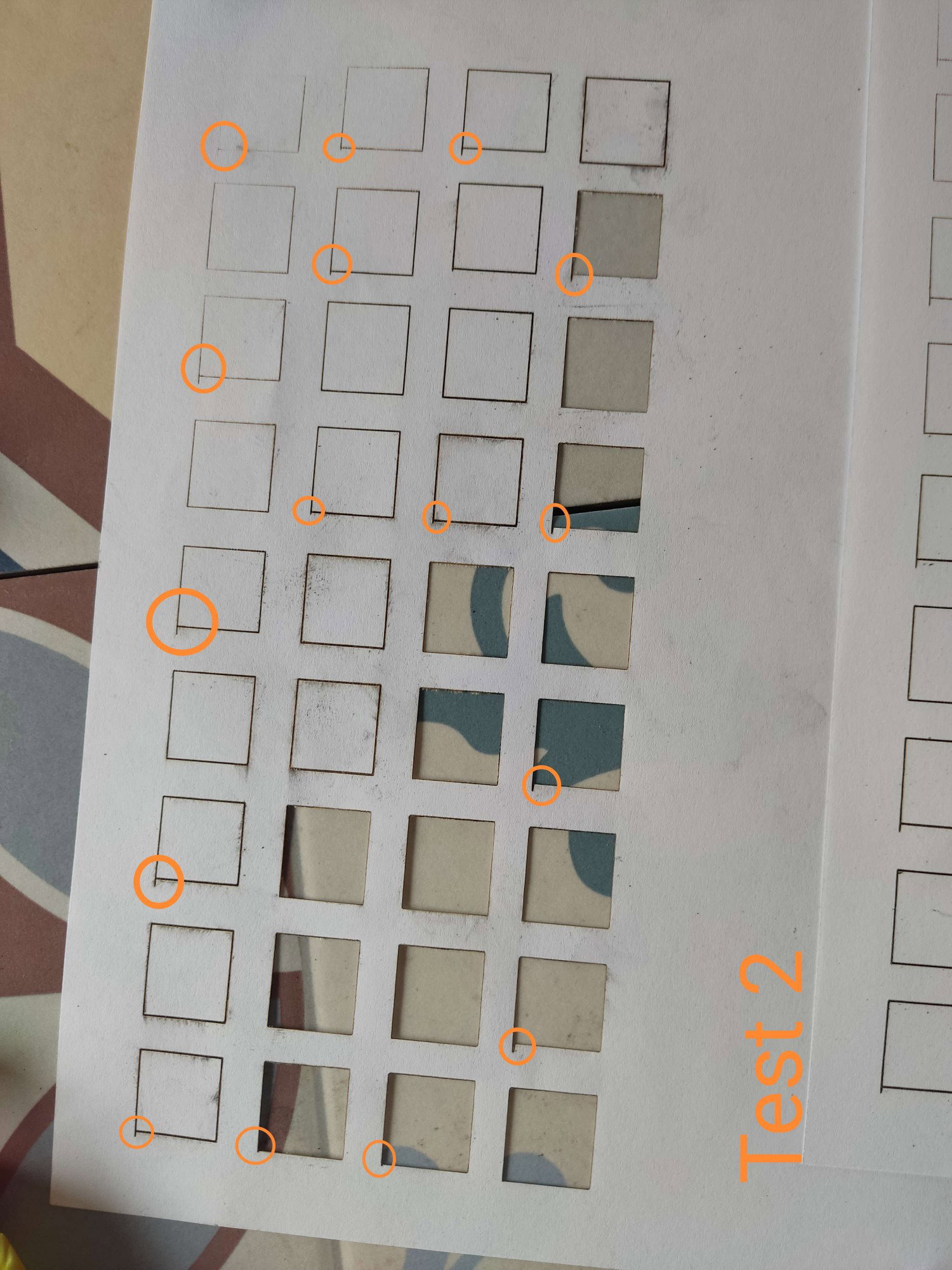
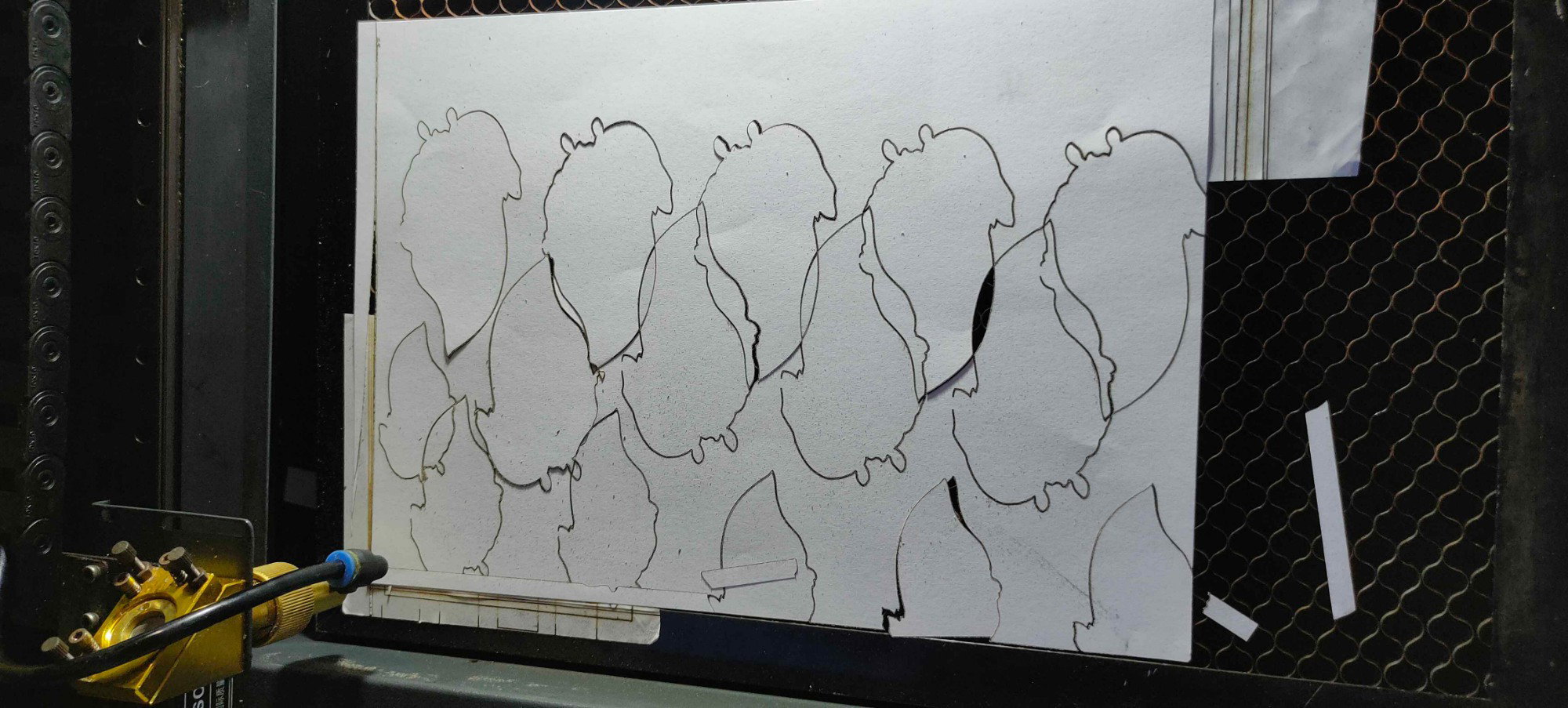
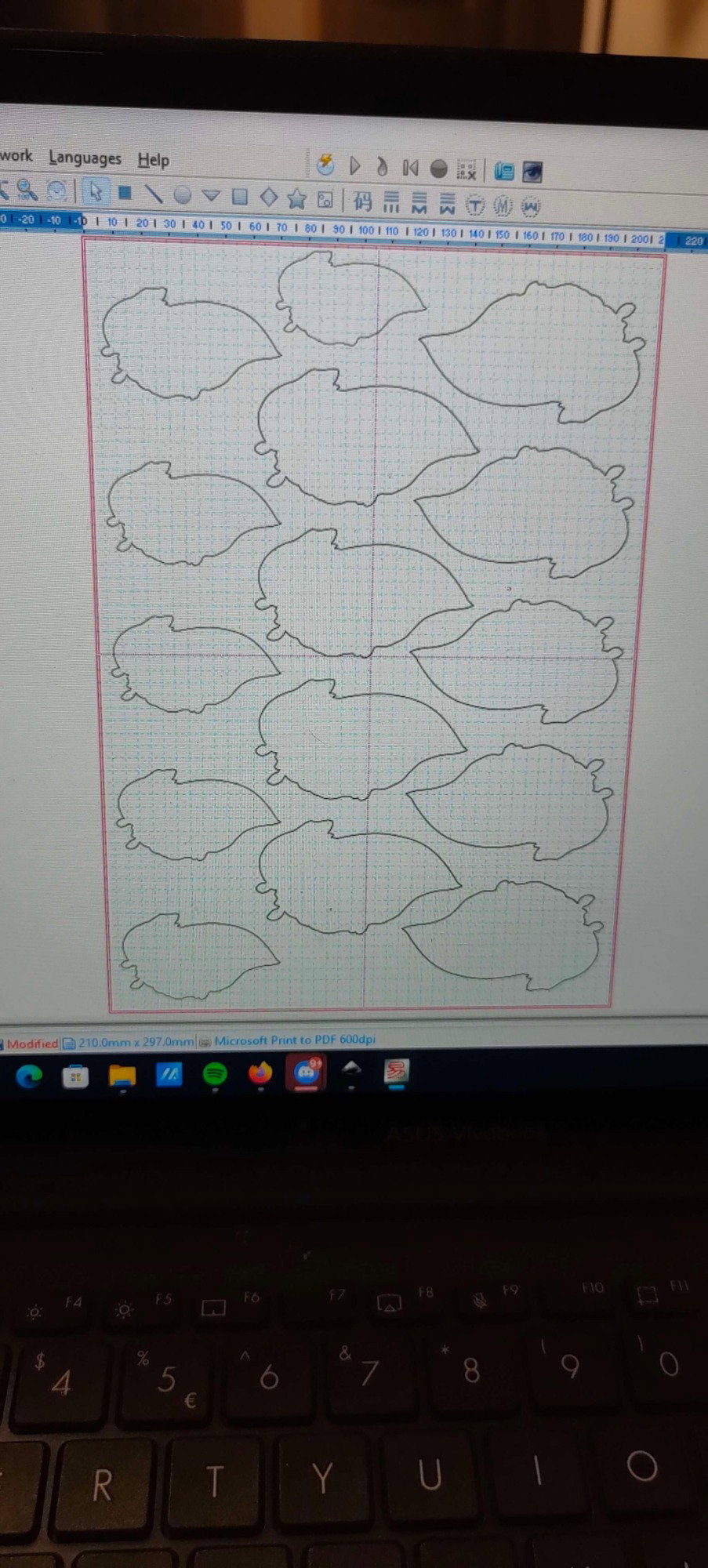
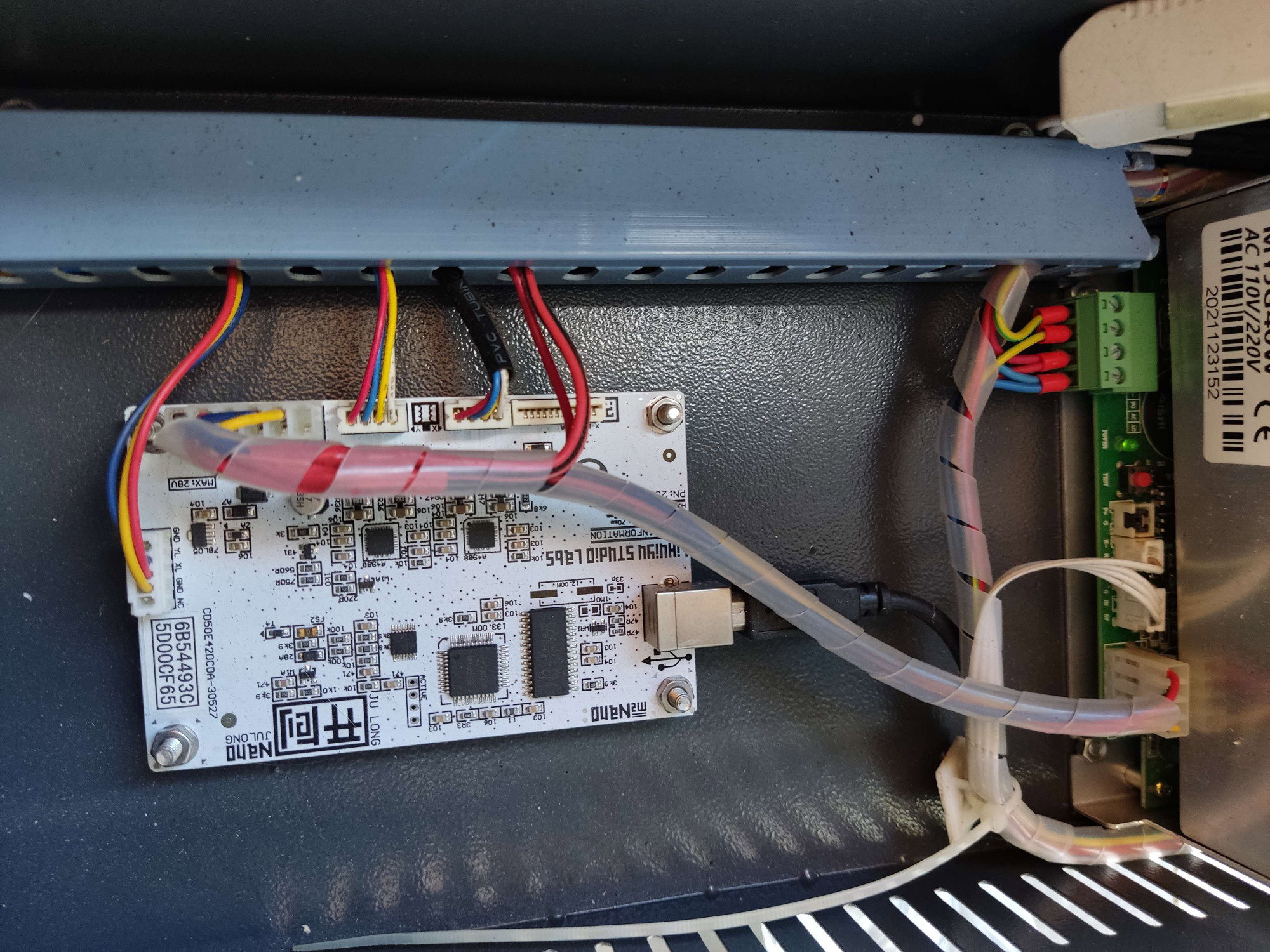
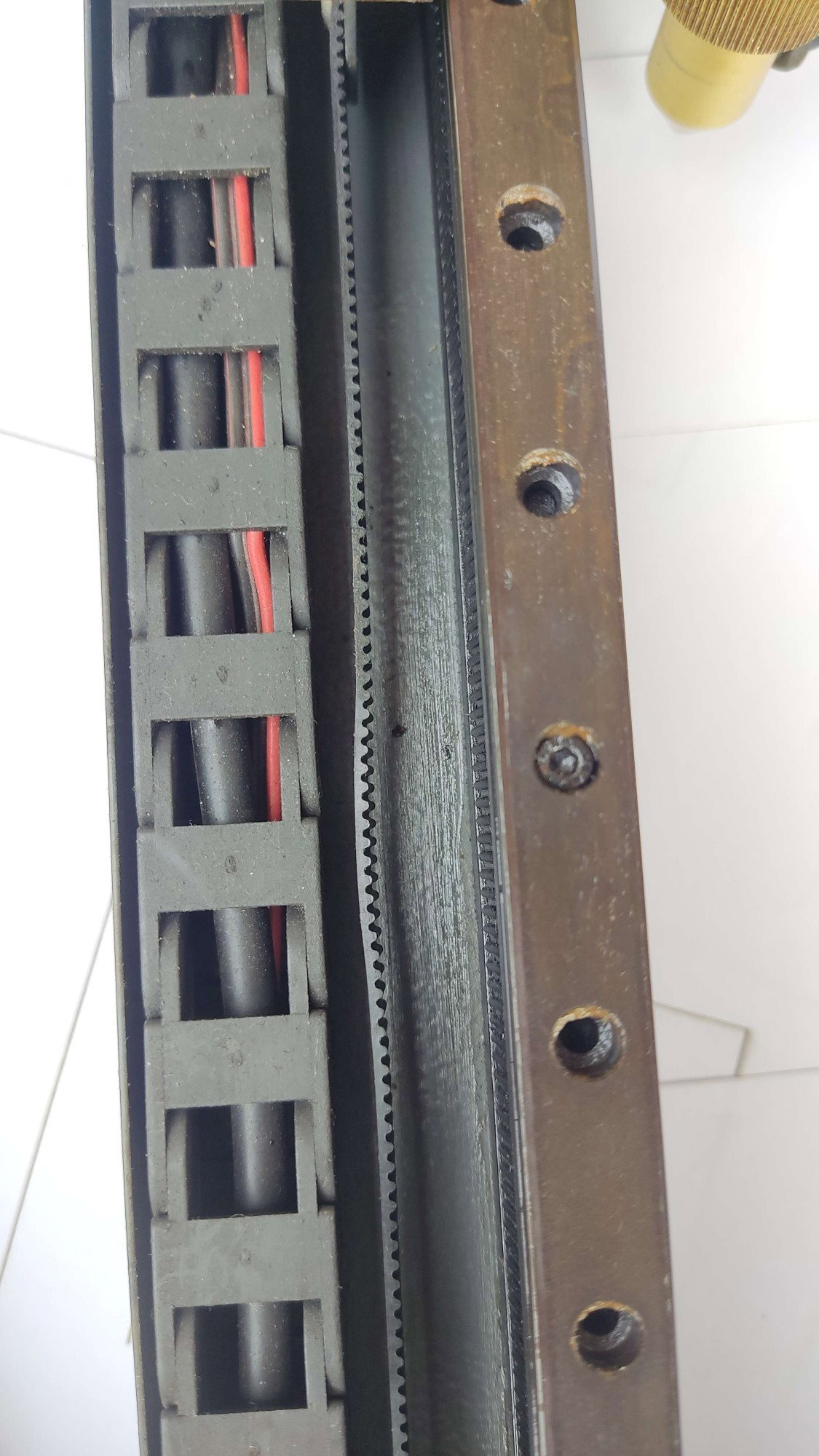
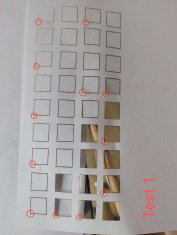
Witam, czy ktoś może w temacie? Posiadam laser k40 ze sterownikiem m2 nano, niestety nie jestem w stanie z niego korzystać, ponieważ podczas wycinania wymiary rzeczywiste nie odpowiadają wymiarom ustawionym w programie LaserDRW (Kwadrat narysowany w programie 10x10 cm po wycięciu ma wymiary 10x10,1 cm, przy innych kształtach i wymiarach różnica zmienia się). Dodatkowo czasami, przy wycinaniu kilku kształtów dzieje się coś dziwnego - laser wycina elementy z losowym przesunięciem, przez co niektóre kształty nachodzą na siebie. Po powtórnym odpaleniu programu (bez zmian ustawień) laser potrafi wycinać normalnie przez kolejne kilka prób. Zdarzają się również małe przesunięcia podczas wycinania wielu pojedynczych kształtów (test z kwadratami), które wydają się występować w tych samych miejscach podczas kolejnego wycinania tego samego pliku. Kolejne testy przeprowadziłem na bardziej złożonych kształtach narysowanych w inkscape i wyexportowanych za pomocą wtyczki LaserDRW extension, przy których występowało spore przesunięcie po osi x - zaznaczyłem punkt początkowy lasera (lewy górny róg pola roboczego) w którym umieszczałem kartkę do cięcia. Wzór za każdym razem był przesunięty parę cm w lewo poza obszar roboczy (oraz wyznaczoną wcześniej skrajną linię oznaczającą krawędź pola). Próbowałem zmieniać naciąg paska osi x - udało mi się wyregulować przesunięcie do ~0,5 mm od zadanej wartości. Z tego co widziałem da się to skorygować programowo, aczkolwiek nie widziałem tej opcji w programie LaserDRW, wiecie czy istnieje taka możliwość? Zauważyłem że jedna z rolek napinacza paska dziwnie się obraca (filmik poniżej), oraz że sam pasek jest odkształcony w jednym miejscu. Czy ktoś jest w stanie pomóc mi z tymi problemami? Byłbym bardzo wdzięczny, bo męczę się z tym już kupę czasu i skończyły mi się pomysły.




-
Witam. W przewodach połączeniowych męsko-męskich nie ma czarnego, a w podpunkcie "Pierwsze prawo Kirchhoffa w praktyce" jest potrzebny czarny. Czym go zastąpić? Pozdrawiam.
-
 #define L_PWM A5 #define L_DIR 4 #define R_PWM 6 #define R_DIR 9 #define led 13 #define przycisk 2 #define PWM_MAX 165 #define buzzer 10 #define lSensor A1 #define rSensor A0 bool jedzie = false; #define granica 940 void setup() { // put your setup code here, to run once: Serial.begin(9600); pinMode(L_DIR, OUTPUT); pinMode(L_PWM, OUTPUT); pinMode(R_DIR, OUTPUT); pinMode(R_PWM, OUTPUT); pinMode(przycisk, INPUT_PULLUP); pinMode(buzzer, OUTPUT); pinMode(lSensor, INPUT_PULLUP); pinMode(rSensor, INPUT_PULLUP); } void loop() { // put your main code here, to run repeatedly: if (digitalRead(przycisk) == LOW){ jedzie = true; } if (jedzie == true){ leftMotor(50); rightMotor(50); if (digitalRead(lSensor) == LOW || digitalRead(rSensor) == LOW){ rightMotor(-50); leftMotor(-50); digitalWrite(buzzer, 1); delay(1000); rightMotor(-50); leftMotor(50); digitalWrite(buzzer, 0); delay(250); } } } void leftMotor(int V){ if(V > 0){ V = map(V, 0, 100, 0, PWM_MAX); digitalWrite(L_DIR, 1); analogWrite(L_PWM, V); } else{ V = abs(V); V = map(V, 0, 100, 0, PWM_MAX); digitalWrite(L_DIR, 0); analogWrite(L_PWM, V); } } void rightMotor(int V){ if(V > 0){ V = map(V, 0, 100, 0, PWM_MAX); digitalWrite(R_DIR, 0); analogWrite(R_PWM, V); } else{ V = abs(V); V = map(V, 0, 100, 0, PWM_MAX); digitalWrite(R_DIR, 1); analogWrite(R_PWM, V); } } void stopMotors(){ analogWrite(L_PWM, 0); analogWrite(R_PWM, 0); } boolean leftSensor(){ if (analogRead(lSensor) > granica){ return 1; } else { return 0; } } boolean rightSensor(){ if(analogRead(rSensor) > granica){ return 1; } else { return 0; } } (Lewy silnik mam odwrócony, więc zamieniłem 1 z 0 i 0 z 1.)
#define L_PWM A5 #define L_DIR 4 #define R_PWM 6 #define R_DIR 9 #define led 13 #define przycisk 2 #define PWM_MAX 165 #define buzzer 10 #define lSensor A1 #define rSensor A0 bool jedzie = false; #define granica 940 void setup() { // put your setup code here, to run once: Serial.begin(9600); pinMode(L_DIR, OUTPUT); pinMode(L_PWM, OUTPUT); pinMode(R_DIR, OUTPUT); pinMode(R_PWM, OUTPUT); pinMode(przycisk, INPUT_PULLUP); pinMode(buzzer, OUTPUT); pinMode(lSensor, INPUT_PULLUP); pinMode(rSensor, INPUT_PULLUP); } void loop() { // put your main code here, to run repeatedly: if (digitalRead(przycisk) == LOW){ jedzie = true; } if (jedzie == true){ leftMotor(50); rightMotor(50); if (digitalRead(lSensor) == LOW || digitalRead(rSensor) == LOW){ rightMotor(-50); leftMotor(-50); digitalWrite(buzzer, 1); delay(1000); rightMotor(-50); leftMotor(50); digitalWrite(buzzer, 0); delay(250); } } } void leftMotor(int V){ if(V > 0){ V = map(V, 0, 100, 0, PWM_MAX); digitalWrite(L_DIR, 1); analogWrite(L_PWM, V); } else{ V = abs(V); V = map(V, 0, 100, 0, PWM_MAX); digitalWrite(L_DIR, 0); analogWrite(L_PWM, V); } } void rightMotor(int V){ if(V > 0){ V = map(V, 0, 100, 0, PWM_MAX); digitalWrite(R_DIR, 0); analogWrite(R_PWM, V); } else{ V = abs(V); V = map(V, 0, 100, 0, PWM_MAX); digitalWrite(R_DIR, 1); analogWrite(R_PWM, V); } } void stopMotors(){ analogWrite(L_PWM, 0); analogWrite(R_PWM, 0); } boolean leftSensor(){ if (analogRead(lSensor) > granica){ return 1; } else { return 0; } } boolean rightSensor(){ if(analogRead(rSensor) > granica){ return 1; } else { return 0; } } (Lewy silnik mam odwrócony, więc zamieniłem 1 z 0 i 0 z 1.) -

POMOC Arduino i błędne odczyty z odbiornika podczerwieni
Mariusz_Nadolny opublikował temat w Arduino i ESP
Cześć, chciałem zrobić jakiś prosty program używający odbiornika podczerwieni. Mam jednak problem z tym, że źle odbierane są dane. Używam tego klasycznego kodu: #include <IRremote.h> IRrecv irrecv(2); decode_results results; void setup() { Serial.begin(9600); irrecv.enableIRIn(); } void loop() { if (irrecv.decode(&results)) { Serial.print(results.value); Serial.println(" "); irrecv.resume(); } } To są dane jakie widzę po wciskaniu jednego przycisku: więc jak widać wartości dla jednego przycisku są różne, a transfer tej liczby na hex w ogóle nie działa. Sprawdzałem czy piny gnd, 5v i 3,3v nadają odpowiedni stan na wyjście pinów i zdaje się, że tak (nie potrafię dobrze posługiwać się arduinowym językiem, więc wysyłam link do poradnika, z którego korzystałem https://learn.andoyaspace.no/ebook/the-cansat-book/common/getting-started/software-start-up-and-test-of-arduino-uno/). Nie mam pojęcia dlaczego to co robię nie działa. Jeżeli ktoś ma jakiś pomysł to z wielką przyjemnością poczytam, bo flustruje mnie to, że nie potrafię nic z tym zrobić :). Dodam jeszcze, że Arduino jest oryginalne, a odbiornik, z którego korzystam to TSOP31236. Robiłem to parę miesięcy temu i wtedy wszystko działało.
- 1 odpowiedź
-
- 2
-

-
- pomoc
- Początkujący
- (i 3 więcej)
-
Witam. Przyszedł mi dzisiaj oscyloskop który kupiłem przez internet. Po włączeniu nic się nie dzieje. Właściwie to prawie nic bo na wyświetlaczu nic się nie pojawia, dioda power się nie świeci, ale zauważyłem że przy włączaniu dioda triggered bardzo delikatnie świeci i po chwili przestaje. Zacząłem kręcić pokrętłem przy włączonym oscyloskopie i odkryłem że ustawienie pokrętła na bardzo dokładną pozycje powoduje miganie diody triggered ze stałą częstotliwością i jak zakładam pełną jasnością. Próbowałem parę razy, czasem częstotliwość migania jest większa, czasem mniejsza. Ale raczej nie ma to znaczenia. Pomimo braku zasilania ono jednak jest? Nie rozumiem tego. Nie wiem jak zabrać się za naprawę tego oscyloskopu. Pani która mi go sprzedała twierdzi że na pewno działał jeszcze przed wysłaniem. Dodam że w temacie oscyloskopów jestem totalnie zielony. Mam pełne wyposażenie, oscyloskop miał jeszcze plomby. Szkoda jakby taki sprzęt się zmarnował. Byłbym wdzięczy za jakiekolwiek porady, schematy i informacje. Z góry dzięki za pomoc.
-

Elektronika Podświetlenie Przycisku w obudowie Pytanie/Zagadka
MaciejG opublikował temat w Elektronika
Witam, piszę tu do was z prośbą o pomoc/radę w sprawie mojego mini projektu. Jestem początkującym w tworzenia elektroniki więc proszę o większą wyrozumiałość w kwestii specjalistycznego nazewnictwa. Celem projektu jest zamienienie podświetlenia przycisku zasilania na obudowie komputera na podświetlenie RGB zsynchronizowane z podświetleniem w obudowie. Sam przycisk ma trzy stany podświetlenia (świeci, mryga i nie świeci). Problem pojawia się, gdy chcemy “zsynchronizować” to z podświetleniem. Na płycie głównej mam trzy dostępne wyjścia: RGB, ARGB, POW-LED. (pin-out zamieszczam poniżej) RGB: 1 - 12v, 2 - G, 3 - R, 4 – B ARGB: 1 - 5v, 2 - Din, 3 - pusty, 4 - GND POW-LED: 1 - 5v, 2 – GND Początkowo zakładam nie korzystać z wyjścia ARGB z powodu większej złożoności tego rodzaju podświetlenia natomiast zostawiam tu informację o jego istnieniu. Schemat powinien realizować taką (pseudo) tablice boolowska: Legenda: IN – tablica stanów wejściowych OUT – tablica stanów wyjściowych PW – zasilanie 5v (POW-LED:1) LED – Czy podświetlenie obudowy się świeci? 12v – Czy na złączu RGB występuje zasilanie? PW LED – Czy przycisk się świeci? LED GRD – puszczenie “minusa” przez gniazdo RGB (RGB:2,3,4) PW GRD – puszczenie “minusa” przez gniazdo PW (POW-LED:2) Opis stanów: Nr.1 - PC włączony Nr.2 - PC wygaszony Nr.3 i 4 – PC uśpiony (przycisk mryga) Nr.5 - PC wyłączone Własnymi siłami doszedłem do takiego prototypu, ale nie jest on idealny. Nie spełnia bowiem przypadku Nr.2 z tablicy. Dostęp mam tylko do tego co jest podłączone do większej płytki stykowej (wyprowadzenia gniazd i diody). Mniejsza jest hipotetyczną implementacja sterowania oświetleniem na płycie głównej. Połączenie minusa pomiędzy płytkami jest nie potwierdzone (ale zakładam, że istnieje). Z braku istnienia modelu Diody RGB (wsp.Anoda) w programie użyłem trzech zwykłych na modelu. Napięcie 3v z baterii też jest umowne. Co do doboru rezystorów to jest to zrobione na oko (na razie) chodzi głównie o zasadę działania. Za wszelkie sugestie, pomysły i podpowiedzi będę bardzo wdzięczny. Ps. Niechciał bym używać w projekcie żadnych mikrokontrolerów typu Arduino itp.

-
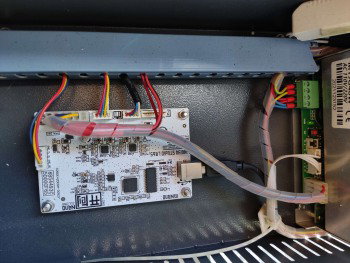
Witam, dzisiaj stanąłem przed wyzwaniem naprawy układu do pilarki tarczowej marki Metabo KGS 301, wydaje mi się że z pomocą multimetra byłem w stanie zlokalizować awarię, lecz na tym mój problem się nie skończył, przeglądając płytkę natrafiłem na element który według mnie był tranzystorem ( ciężko określić bo się posypał, zdjęcie poniżej). Muszę się przyznać że nie jestem na tyle biegły w temacie elektroniki gdyż na codzień zajmuję się elektryką budowlaną. Szkoda by było po prostu wyrzucić pilarkę. Dlatego pytam o radę. Czy będziecie w stanie mi jakoś doradzić? Czy specjalista by sobie z tym poradził? Z góry dziękuje za poświęcony czas.



-
Witam, założyłem wcześniej wątek, o tym. Dziękuję @farmaceuta @ethanak @SOYER i innym za tłumaczenie, o co chodziło z else/if'ami, ale nadal nie wiem, kiedy ich użyć. Czy ktoś dałby mi jakieś przykłady, czy coś innego. Nadal nie wiem, w jakich przypadkach ich użyć. Bardzo proszę o wytłumaczenie.
-
Witam, czy ktoś mógłby wytłumaczyć mi, o co chodzi z else if'ami? Zastosowałem je w moim robocie, ale nie do końca wiem, czym one się różnią od zwykłych, osobnych if'ów. Chciałbym również się dowiedzieć, kiedy je wykorzystywać. Z góry dzięki
-
Dopiero zaczynam z arduino i nie wiem gdzie mam tu błąd. Chcę podłączyć dalmierz ultradźwiękowy brzęczyk i leda który się zaświeci gdy coś się ruszy #define trigPin 12 #define echoPin 11 void setup() { Serial.begin (9600); pinMode(trigPin, OUTPUT); //Pin, do którego podłączymy trig jako wyjście pinMode(echoPin, INPUT); //a echo, jako wejście pinMode(2, OUTPUT); //Wyjście dla buzzera pinMode(4, OUTPUT); } void loop() { zakres(10, 25); //Włącz alarm, jeśli w odległości od 10 do 25 cm od czujnika jest przeszkoda delay(100); } int zmierzOdleglosc() { long czas, dystans; digitalWrite(trigPin, LOW); delayMicroseconds(2); digitalWrite(trigPin, HIGH); delayMicroseconds(10); digitalWrite(trigPin, LOW); czas = pulseIn(echoPin, HIGH); dystans = czas / 58; return dystans; } void zakres(int a, int b) { int jakDaleko = zmierzOdleglosc(); if ((jakDaleko > a) && (jakDaleko < b)) { digitalWrite(2, HIGH); //Włączamy buzzer } else { digitalWrite(2, LOW); //Wyłączamy buzzer, gdy obiekt poza zakresem } void zakres(int a, int b) { int jakDaleko = zmierzOdleglosc(); if ((jakDaleko > a) && (jakDaleko < b)) { digitalWrite(4, HIGH); } else { digitalWrite(4, LOW); } }

-
mam taki problem. bo w filmach instalacji oprogramowania multimedialnego kodi na youtube widać, że filmy mają taką fajną nakładkę tutaj przypnę link jak to powinno wyglądać. z góry dzięki link do zdjęcia
-
Chciałabym się dowiedzieć czemu jest to podłączone?



-
Nie wiem jak dobrać kamerę i nadajnik do 100zł, dacie radę pomóc a i ja mam jako odbiornik dwa google fpv:)
-
Cześć, czołem Gdy czytam tematy, jakie znajdują się w dziale "Zupełnie zieloni" zastanawiam się, czy nie powinienem zatytułować posta z użyciem koloru określającego jeszcze większą niedojrzałość Dopiero zaczynam. Zabawa elektroniką sprawia mi przyjemność. Potrzebowałem czegoś takiego. Czegoś, co oderwie mnie od rzeczywistości i da trochę dziecięcej radości. Umarłem na kilka dni próbując zrozumieć projekt pod nazwą "Multiwibrator astabilny". Zastanawiałem się, w jaki sposób do tego podejść. Znalazłem wyjaśnienie na Wikipedii i wydaje mi się, że mniej więcej go już rozumiem. No i przestraszyłem się trochę, bo elektronicznych projektów jest wiele. Rozumiem, jak działają poszczególne elementy elektroniczne (a może tak mi się tylko wydaje), a gdy próbuję pojąć ich działanie w komplecie z innymi, nie daję rady. W związku z tym mam kilka pytań. 1. Czy są jakieś podstawowe układy elektroniczne (jak wyżej wspomniany multiwibrator astabilny), które trzeba poznać dogłębnie, żeby zrozumieć więcej? Tak jak gotowe formuły w językach programowania. Takie proste układy, których znajomość działania pozwoli na zrozumienie tych bardziej skomplikowanych i budowę swoich. Albo na diagnozę zepsutych urządzeń. 2. Jeżeli tak, to czy jesteście mi w stanie polecić takie podstawowe układy? 3. Jak podejść do czytania schematów? Istnieją zasady, które mówią jak to robić? Mając zaawansowany schemat dzielimy go na jakieś mniejsze schematy odpowiadające za konkretne zadania? 4. Jeśli chodzi o proste schematy. Jak je czytać? Idąc "z prądem" po kolei jak płynie? Czy może są podzespoły elektroniczne, na które w pierwszej kolejności trzeba zwrócić uwagę próbując zrozumieć działanie układu? Jak to robicie? Jak doszliście do zrozumienia działania układów? Jestem zafascynowany, gdy oglądam na YT np. De-kompozytora i to, jak diagnozuje i naprawia sprzęty. Albo gdy patrząc na układ, wie jakie elementy za co opowiadają. Będę wdzięczny za perspektywę każdego z Was. Może któraś z nich trafi do mnie szczególnie. Nie pogardzę również przykładami i dodatkowymi źródłami informacji, z których być może korzystaliście, gdy mieliście podobny problem do mojego. Pozdrawiam serdecznie
-
Witam serdecznie jest to mój pierwszy wpis na tym forum oraz pierwszy krok do stworzenia mojego projektu. Moim projektem jaki chciałbym stworzyć jako pierwszy, jest stoper z czujnikiem wstrząsu/drgań. Polegał by on na tym że mierzony czas zatrzymał by się w momencie wykrycia wstrząsu. I na początek chciał bym prosić o pomoc, osoby która by chętnie pomogła mi w tym projekcie, ponieważ jestem kompletnie zielony. Dziękuję i pozdrawiam liczę na dobrą współpracę
-
Witam, jestem początkujący i natrafiłem na następujący problem, kamera nie odpowiada na raspistill, po próbie skorzystania z motion wyświetla się następująca strona. Proszę o pomoc w tej sprawie

-
Czeeeść ;) Jakiś czas szukam fajnego zestawu do telco i wybór padł na Raspberry. Wstępnie myślałem o modelu Pi 4B 4GB RAM, z tego co wyczytałem to powinien dać rady z Google Meets. Jako, że w temacie Maliny jestem zielony - ktokolwiek jest mi w stanie pomóc w doborze obudowy i urządzeń peryferyjnych? Obudowa z chłodzeniem pasywnym wystarczy? Czy mogę mieć wpiętą zwykłą kamerę internetową do tego głośnik, klawiaturę i myszkę po BT? Czy taki zestaw ma prawo działać poprawnie?
-
 Witam, na czym najlepiej zaprezentować do projektu jak działa 2 prawo kirchhoffa? Chodzi oczywiście o samochód osobowy.
Witam, na czym najlepiej zaprezentować do projektu jak działa 2 prawo kirchhoffa? Chodzi oczywiście o samochód osobowy. -
Witam zakupiłem aparaturę RC flysky gt3b z odbiornikiem flysky gr3e oraz ta elektronikę. Problem polega na tym że silnik kręci się prawo lewo gdy podłącze zasilanie gdy nacisnęłam wajchę od gazu silnik zaczyna się kręcić. Gdy dam wajchę do tyłu to samochód hamuje natomiast gdy dam do przodu samochód przyspiesza. Niestety nie mogę dać filmiku bo plik jest za duży. Proszę o pomoc



-
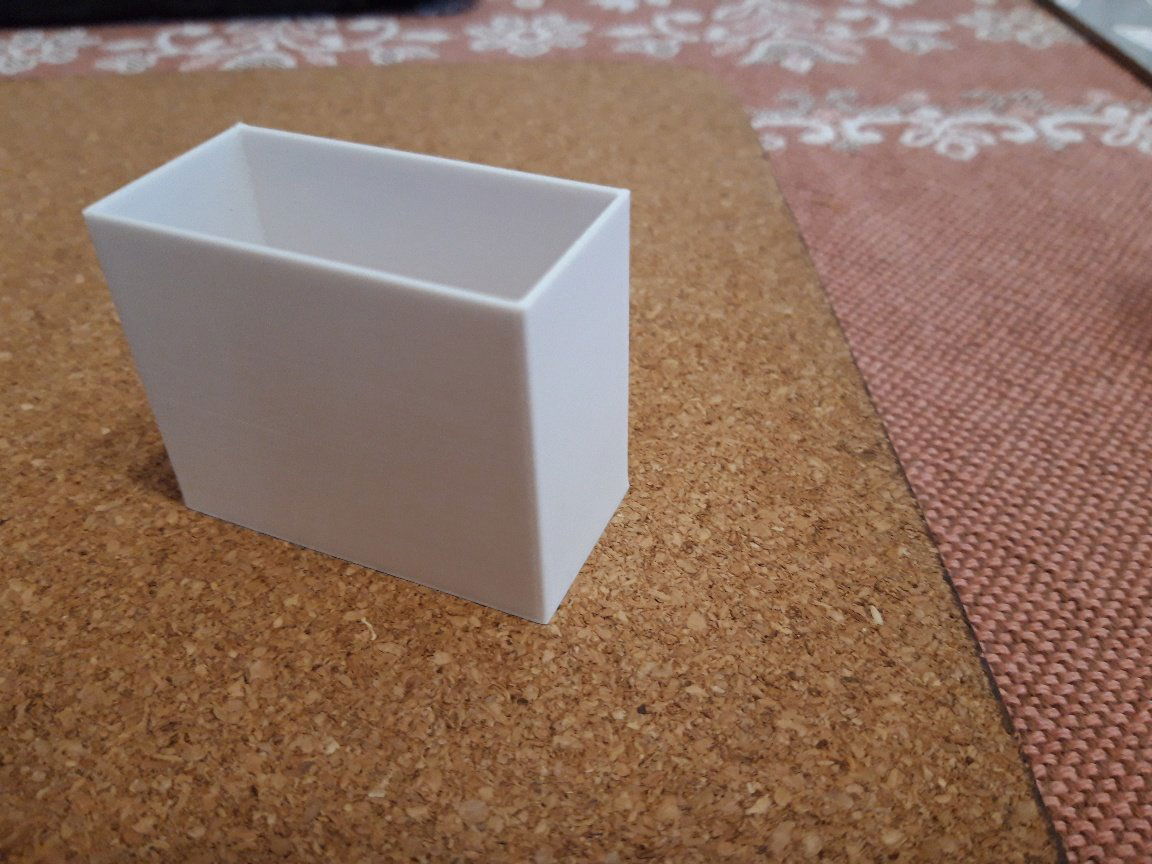
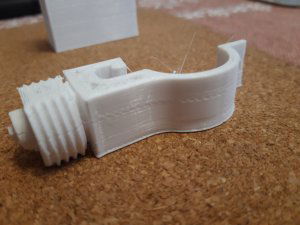
Witam. Mam na imię Przemek. Od niedawna jestem posiadaczem wymarzonej drukarki(ender 3v2) Po przedrukowaniu 1 kg czarnego PLA jako początku przygody z drukiem, pod koniec rolki zderzyłem się z problemem zatykajacej się dyszy i rurki ptfe.Po pokonaniu problemu z zatykająca się dyszą(zakup nowej rurki ptfe i dyszy stalowej 0.5mm) oraz zainstalowaniu najnowszego marlina zacząłem drukować z PETG(3D Active). Mialem problem z przyczepnością wydruków. Znalazłem sposób na ten niesforny filament. Postanowiłem skalibrować wszystko aby wydruki były jak najlepsze. No może nie wyszlo mi zbyt z retrakcją(nitki). Wydrukowałem mini octopus i tu zaczęly się dziwne rzeczy pojawiać. foto 1 Myślałem, że to problem po kalibracji flow rate. Więc wróciłem ustawienia z przed kalibracji. I efekt mnie ucieszył. Na krótko niestety. Po ponownym wydruku octopus znowu to samo. Więc spróbowałem uchwyt wydrukować. Oto rezultat foto2 Potem kapsel wlewu płynu do spryskiwaczy. I efekt podobny. Foto 3 i foto 4 Pomyślałem, że może kurz lub jakieś paprochy na sprzęcie. Sprężone powietrze poszło w ruch. Czysto. Wydruki dalej z tymi dziwnymi śladami. Więc zgłupiałem. Czy spotkał się ktoś z czymś takim. Nie mam narazie dostepu do drukarki (praca,2tyg. trasa), ale będę wdzięczny za wszelkie pomysły, które wypróbuję po powrocie do domu. Pozdrawiam Wszystkich.




-
Witam potrzebuje pomocy jakiś czas temu zlecilem komuś zrobienie tablicy ledowej 100cm/50cm składającej się z 15 rzędów po 30 ledów ws2812b połączonych szeregowo do tego kupiłem arduino uno rev3 zasilacz impulsów 12v 20.8A 250w oraz przetwornice lm2596 wszystko jest naklejane na plexi 100x50 z tego co mi pisał chłopak co mi to wszystko montuje że jest problem z zasilaniem led wiem jeszcze to że do każdego z pasków poprowadził oddzielną zasilanie z przetwornice aby nie było spadku napiecia Zamierzam zabrać od niego wszystko i dokończyć samemu zostawię mu tylko kwestie programowania arduino bo se chłopak nie radzi Pomóżcie mi jak to mam przerobić żeby zaczęło działać czy mam coś do tego dokupić bo myślałem o wymianie przetwornice na mocniejszą ale jaką była by dobra Kurczę pomocy bo to ma być prezent dla syna który się bawi w Yutube i mało się tam wyświetlać jego nik i takie są tam Pozdrawiam Kamil
-
Cześć, chce zrobić termostat, który będzie oparty na dwóch rożnych ekranach które będą przełączane jednym guzikiem. Część, kodu mam napisane jednak doszedłem do momentu w którym nie wiem co może być nie tak. Przyjmę każda pomoc w ruszeniu z miejsca Wiem, że podobny wątek był poruszany na forum jednak nie chce zmieniać pierwotnego problemu innego uzytkownika. Poniżej załączam kod na jakim działam. Część kodu jest napisana prze zemnie a część zapożyczona z gotowego. #include <Wire.h> #include <LiquidCrystal_I2C.h> #include "dht.h" LiquidCrystal_I2C lcd(0x3F,20,4); dht DHT22; #define DHT22PIN 13 int menu =1; // This variable stores the current Screen number boolean hasChanged = true; const int buttonPin = 10; // the number of the pushbutton pin int buttonState; // the current reading from the input pin int lastButtonState = LOW; // the previous reading from the input pin unsigned long lastDebounceTime = 0; // the last time the output pin was toggled unsigned long debounceDelay = 50; // the debounce time; increase if the output flickers unsigned long aktualnyCzas = 0; // Przypisanie long temperatury i willgotnosci unsigned long zapamietanyCzas = 0; unsigned long roznicaCzasu = 0; void setup() { lcd.init();// initialize the lcd lcd.backlight(); pinMode(buttonPin, INPUT_PULLUP); } void loop() { if (hasChanged == true) { switch(menu) { case 1: { secondScreen(); } break; case 2: { fourthScreen(); //temperatura } break; case 3: { fifthScreen(); // wilgotnosc } break; case 0: { } break; } } //------------------------------- // BEGIN of the switch debouncing code int reading = digitalRead(buttonPin); if (reading != lastButtonState) { // reset the debouncing timer lastDebounceTime = millis(); } if ((millis() - lastDebounceTime) > debounceDelay) { // whatever the reading is at, it's been there for longer // than the debounce delay, so take it as the actual current state: // if the button state has changed: if (reading != buttonState) { buttonState = reading; // only toggle the LED if the new button state is HIGH if (buttonState == HIGH) { hasChanged = true; menu++; } } else { hasChanged = false; } } lastButtonState = reading; // END of the switch Debouncing code // -------------------------------------- if (menu > 3){ menu = 1; } } /////////////////////////////////////////////////////// WIDOK GŁÓWNY ///////////////////////////////////////////////// void secondScreen() { lcd.clear(); lcd.setCursor(0,0); // Column, line lcd.print(" Ekran nr 1 "); lcd.setCursor(0,1); lcd.print(" na moim menu !! "); } /////////////////////////////////////////////////////// TEMPERATURA ////////////////////////////////////////////////// void fourthScreen() { aktualnyCzas = millis(); roznicaCzasu = aktualnyCzas - zapamietanyCzas; if (roznicaCzasu >= 1000UL) { int chk = DHT22.read(DHT22PIN); zapamietanyCzas = aktualnyCzas; lcd.clear(); lcd.setCursor(0,0); lcd.print("Temperatura (C): "); lcd.setCursor(0,1); lcd.print((float)DHT22.temperature, 2); } } /////////////////////////////////////////////////////// WILOGTNOSC //////////////////////////////////////////////////// void fifthScreen() { aktualnyCzas = millis(); roznicaCzasu = aktualnyCzas - zapamietanyCzas; if (roznicaCzasu >= 1000UL) { int chk = DHT22.read(DHT22PIN); zapamietanyCzas = aktualnyCzas; lcd.clear(); lcd.setCursor(0,0); lcd.print("Wilgotnosc: "); lcd.setCursor(0,1); lcd.print((float)DHT22.humidity, 2); } } Główne problemy to: 1. Menu przełącza się miedzy ekranami, jednak zmienne (temperatury oraz wilgotności) nie są aktualizowane na bieżąco, widać tylko jakby jedną "klatkę" danego odczytu. Dopiero po powrocie do tego samego ekranu wartości jakby się aktualizowały. Chciałbym, żeby dane aktualizowały się na bieżąco. No i jak za szybko kliknę to czasami przeskakuje o 2 ekrany. 2. Chciałbym dodać do tego termostatu, dwoma kolejnymi przyciskami, funkcje regulacji temperatury, by przekaźniki wyłączały się po osiągnięciu założonych wartości. 3. Punkt na którym zależy mi póki co najmniej, optymalizacja kodu oraz ewentualnie dodanie dodatkowych funkcji. Jestem mega amatorem pod względem optymalizacji, a wiem ze wiele spraw można uprościć, dodając biblioteki. Kurs na Arduino przerobiony, przynajmniej pierwsza część w 100 %, część druga w około 40%. Dziękuje bardzo za wszelką pomoc.
-
Witam, Zastanawiam się czy można gdzieś nabyć drogą kupna Soniczny Sensor 3D (Qualcomm 3D Sonic Sensor: ultrasonic security solution I Qualcomm) Drugie pytanie to: Gdzie kupujecie elementy elektryczne? (ja; Sklep Texas Instrument i TME) Zaznaczam, iź nie jestem doświadczonym elektronikiem. Jestem po kursach na Forbocie. Jestem na wylocie z technikum informatycznego.
-
Cześć forumowicze! Mam do was ogromną prośbę, robie projekt, "motogp simulator" który ma działać tak jak zwykła kierownica do gier, tylko ze ma byc motocyklem. Problem jest w tym ze chciałbym zrobić to na własnym kontrolerze (nie na arduino na którym aktualnie jest) problem jest w tym z e jestem totalnie zielony w avr jakbyscie mogli dać jakie kolwiek porady odnośnie tego jak zacząć byłbym niezwykle wdzięczny
-
Chciałbym sobie kupić zasilacz laboratoryjny ale się nie znam na tym. Czy możecie mi polecić jakiś dobry zasilacz na początek do 300 zł . Czy kupno zasilacza za taką cenę ma sens ? Z góry dziękuję Najlepiej jakby było to na botlandzie