Przeszukaj forum
Pokazywanie wyników dla tagów 'STM32F103'.
Znaleziono 6 wyników
-
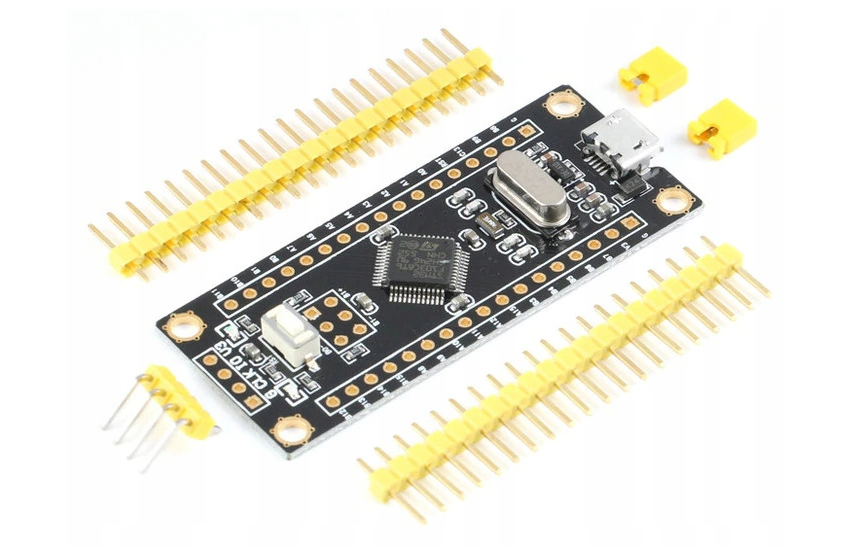
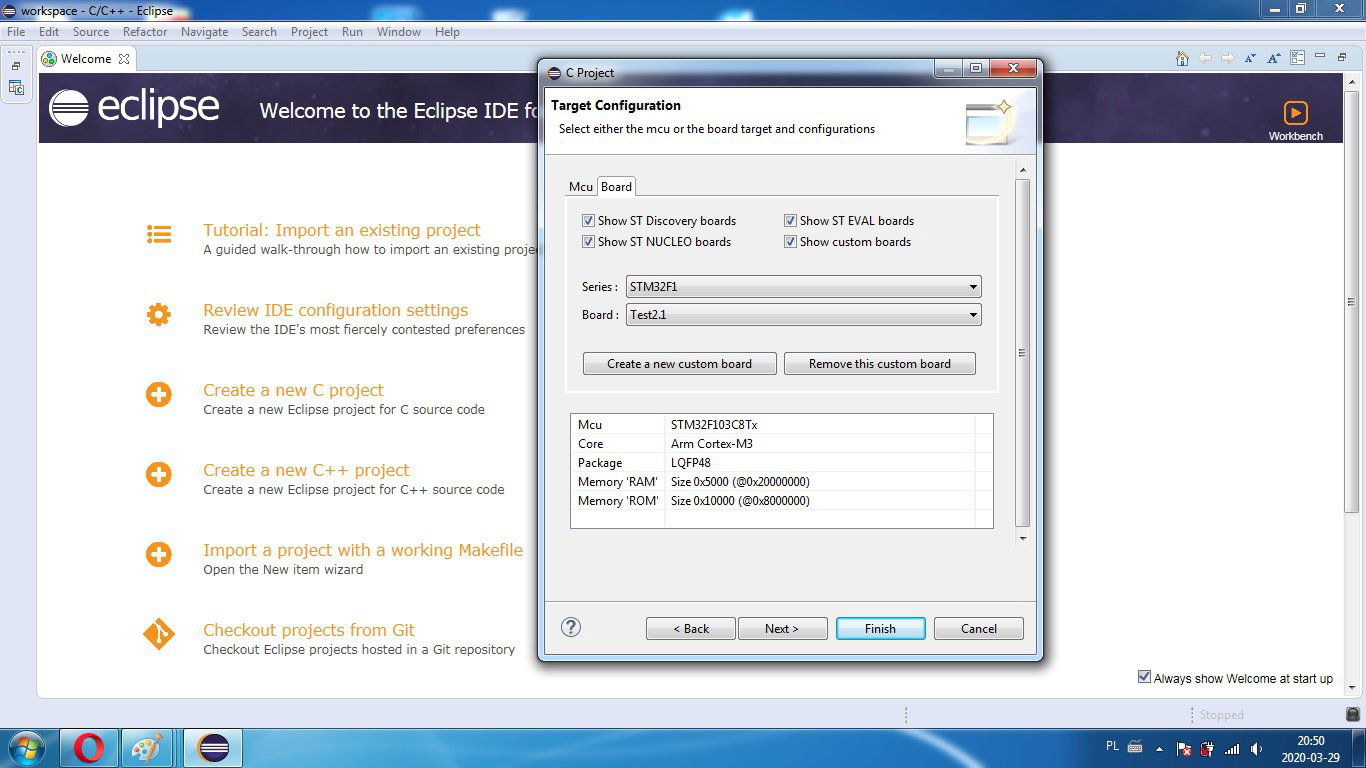
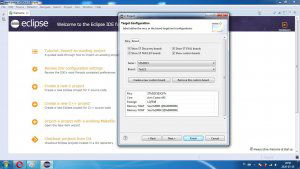
 Na podstawie kursu STM32 chcę uruchomić płytkę STM32F103C8T6, zdjęcie płytki poniżej. Oczywiście nie mogę podczas tworzenia projektu wybrać NUCLEO-F103RB więc poniżej przesyłam zdjęcia z konfiguracji, czy jest ona prawidłowa ? Czy może powinienem wejść w zakładkę MCU a nie Board i tam wybrać procesor ? Przechodząc do biblioteki, zgodnie z opisaną aktualizacją: https://forbot.pl/forum/topic/8387-kurs-stm32-3-plytka-nucleo-konfiguracja-srodowiska/page/10/#comments Dla NUCLEO-F103RB: https://www.st.com/en/embedded-software/stsw-stm32143.html#overview Dla STM32F103C8T6: https://www.st.com/content/st_com/en/products/microcontrollers-microprocessors/stm32-32-bit-arm-cortex-mcus/stm32-mainstream-mcus/stm32f1-series/stm32f103/stm32f103c8.html#tools-software Następnie wybrałem zakładkę Tools & Software, następnie MCU & MPU Embedded Software, następnie najbardziej podobny plik do "based on Standard Peripheral Library" to (proszę kliknąć ctrl+f i wkleić STM32-CLASSB-SPL). Czy to jest odpowiedni plik ?
Na podstawie kursu STM32 chcę uruchomić płytkę STM32F103C8T6, zdjęcie płytki poniżej. Oczywiście nie mogę podczas tworzenia projektu wybrać NUCLEO-F103RB więc poniżej przesyłam zdjęcia z konfiguracji, czy jest ona prawidłowa ? Czy może powinienem wejść w zakładkę MCU a nie Board i tam wybrać procesor ? Przechodząc do biblioteki, zgodnie z opisaną aktualizacją: https://forbot.pl/forum/topic/8387-kurs-stm32-3-plytka-nucleo-konfiguracja-srodowiska/page/10/#comments Dla NUCLEO-F103RB: https://www.st.com/en/embedded-software/stsw-stm32143.html#overview Dla STM32F103C8T6: https://www.st.com/content/st_com/en/products/microcontrollers-microprocessors/stm32-32-bit-arm-cortex-mcus/stm32-mainstream-mcus/stm32f1-series/stm32f103/stm32f103c8.html#tools-software Następnie wybrałem zakładkę Tools & Software, następnie MCU & MPU Embedded Software, następnie najbardziej podobny plik do "based on Standard Peripheral Library" to (proszę kliknąć ctrl+f i wkleić STM32-CLASSB-SPL). Czy to jest odpowiedni plik ?
-
Witam, muszę zaimplementować odczyt temperatury z czujnika DHT11 poprzez STM32F103RB i wysyłać to poprzez USART(9600b/s). Korzystam z DWT_delay aby mieć opóźnienie w us do inicjalizacji DHT. Problem polega na tym, że mikroprocesor pobiera dane tylko raz i zawiesza się. USART obsługuje przerwania i jest zaimplementowany na buforze kołowym(piny domyślnie PA2-PA3). Dodatkowo mam wyświetlacz 7-segmentowy i docelowo chce na nim wyświetlać dane ( podpięcia PA0-PA1,PA4-PA8) z czujnika(PA9). Po resecie z watchdoga/czarnego buttona na nowo pobrane są dobre dane. W załączniku podsyłam program main z CubeIDE. ProjectMain.zip
-
Dzień dobry, Korzystam z STM32F103C8, oprogramowanie CUBEIDE, debugowanie st-link v2. Problem polega na tym, że dobrze działające DMA w circular mode zawiesza program gdy dodaję do niego 4 linie obliczeń (sinusy, cosinusy, arcusy), #include <math.h> wpisałem. obliczenia z wyłączoną konwersją również wykonują się poprawnie /* USER CODE BEGIN 0 */ void set_coordinate (void) { ST=hour+(4*(18-15)); D = 23.45f*sinf(360*((284.f+day_of_year)/365)*rad)*rad;//////////////////////////////////blad Height = asinf(sinf(D)*sinf(W)+cosf(D)*cosf(W)*cosf((15*(hour-12))*rad))*rad;// nie dochodzi do tych obliczen A = acosf((sinf(D)-sinf(Height)*sinf(W))/(cosf(Height)*cosf(W)))*deg; H=Height*deg; } /* USER CODE BEGIN 2 */ HAL_ADC_Start_DMA(&hadc1, adc_val, 4); /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ // set_coordinate(); motor_rad_1 = adc_val[0]/13.65;//podzielic przez zakres 4095/300 stopni motor_rad_2 = adc_val[1]/13.65; } /* USER CODE END 3 */ } hadc1.Instance = ADC1; hadc1.Init.ScanConvMode = ADC_SCAN_ENABLE; hadc1.Init.ContinuousConvMode = ENABLE; hadc1.Init.DiscontinuousConvMode = DISABLE; hadc1.Init.ExternalTrigConv = ADC_SOFTWARE_START; hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT; hadc1.Init.NbrOfConversion = 4; if (HAL_ADC_Init(&hadc1) != HAL_OK) { Error_Handler(); } /** Configure Regular Channel */ sConfig.Channel = ADC_CHANNEL_1; sConfig.Rank = ADC_REGULAR_RANK_1; sConfig.SamplingTime = ADC_SAMPLETIME_239CYCLES_5; if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK) { Error_Handler(); } /* USER CODE BEGIN ADC1_Init 2 */ /* USER CODE END ADC1_Init 2 */ } /* Enable DMA controller clock */ static void MX_DMA_Init(void) { /* DMA controller clock enable */ __HAL_RCC_DMA1_CLK_ENABLE(); /* DMA interrupt init */ /* DMA1_Channel1_IRQn interrupt configuration */ HAL_NVIC_SetPriority(DMA1_Channel1_IRQn, 0, 0); HAL_NVIC_EnableIRQ(DMA1_Channel1_IRQn); } Z kodu wyciąłem tylko najważniejsze rzeczy, mogę zamieścić dodatkowo screeny z konfiguracji ADC,DMA Nie wyskakuje żaden błąd, tylko program zawiesza się na liniach obliczeń. Dlaczego obliczenia zawieszają program? Czy to nie jest tak, że DMA nie korzysta z procesora? Moim pomysłem byłoby zastosowanie wyzwalania konwersji przez licznik, wykonywanie jej co 200 ms, ale nie wiem, czy ma to sens, drugim pomysłem jest odczyt ADC zaraz po obliczeniach, ale nie mam pojęcia jak się do tego zabrać. z góry dziękuję za odpowiedź
-
Dzień dobry, Jest to mój pierwszy wpis na forum, szukałem wcześniej podobnego tematu ale go nie znalazłem, tak więc zakładam nowy. Steruję silnikiem DC za pomocą sterownika L293D, połączenie jest poprawne, steruję "ręcznie" silnikiem , więc od tej strony wszystko działa, problem pojawił się przy programowaniu STMki. Korzystając z kursu STM32 F1 HAL #4 porty GPIO próbuję wystawić sygnał sterujący silnikiem lecz pozostaje on w stanie wysokim. Jeżeli zmienię PIN na diodę LED PC13 to ta działa poprawnie. Co zrobić aby dany PIN zmieniał swój stan? while (1) { /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ HAL_GPIO_WritePin(GPIOA, GPIO_PIN_15, GPIO_PIN_SET); HAL_Delay(500); HAL_GPIO_WritePin(GPIOA, GPIO_PIN_15, GPIO_PIN_RESET); HAL_Delay(500); } /* USER CODE END 3 */ }
-

Usypianie mikrokontrolera, karty SD (FatFS) i OLED
InspektorGadzet opublikował temat w Mikrokontrolery
W zasilanym z baterii urządzeniu na STM32F103 mam kartę SD, i OLED. Po czasie bezczynności usypiam OLED i mikrokontroler. Niestety pobór prądu jest duży, ok 23mA. Zacząłem szukać przyczyny, okazało się, ze gdy wyjmę kartę SD, pobór prądu spada do 160uA. Po wyjęciu OLED pobór prądu spada do 60uA. Pomijając trochę za duży ale akceptowany pobór prądu przez mikrokontroler uśpieni lub jakiś element zewnętrzny duży problem mam z karta SD. Czasem zdarzy się, że nie pobiera dużo prądu (wszystko razem ok 1mA, z czego wynika, ze karta SD 840uA). Jak zmniejszyć pobór prądu przez kartę SD? Byłem przekonany, że gdy CS=H, to karta pobiera minimum energii (mam rezystor podciągający CS do zasilania) ale wygląda na to, że nie. Na wszelki wypadek odmontowuję kartę (nie sprawdziłem jeszcze, co tak naprawdę FatFS wtedy robi) ale to nic ni cdaje. Czy kartę trzeba uśpić jakąś komendą? Nic takiego nie znalazłem. -
Siemka wszystkim. Mam takowy problemik, że odczytując dane z akcelerometru odczyt na osi Z nie wskazuje realnej wartości przyśpieszenia. Na obrazku mamy odczyty z poszczególnych osi (w jednostkach G). Widać że na osi Z jest odczyt przekraczający 1G. Gdy obrócę sensor o 180 stopni tak aby oś Z zmieniła zwrot to odczyt na niej wynosi poniżej 1G. Wynika z tego jakby do ozi Z był dodany pewien offset. Czujnik to MPU 9255. Z czego to może wynikać i jak temu zaradzić? Poniżej wstawiam też kodzik. Dzięki za pomoc //settings accelerometer and gyroscope HAL_I2C_Mem_Write(&i2c, 0xD0, 27, I2C_MEMADD_SIZE_8BIT, &Settings,1,1000); HAL_I2C_Mem_Write(&i2c, 0xD0, 28, I2C_MEMADD_SIZE_8BIT, &Settings,1,1000); HAL_I2C_Mem_Write(&i2c, 0xD0, 55, I2C_MEMADD_SIZE_8BIT, &BypassEnable,1,1000); //Power Down mode HAL_I2C_Mem_Write(&i2c, 0x18, 0x0A, I2C_MEMADD_SIZE_8BIT, &SettingsM,1,1000); HAL_Delay(100); //16 bit output mode 2 HAL_I2C_Mem_Write(&i2c, 0x18, 0x0A, I2C_MEMADD_SIZE_8BIT, &SettingsL,1,1000); //16 bit 8Hz while (1) { //A X HAL_I2C_Mem_Read(&i2c, 0xD0, 59, I2C_MEMADD_SIZE_8BIT, &DAHx,1,100); HAL_I2C_Mem_Read(&i2c, 0xD0, 60, I2C_MEMADD_SIZE_8BIT, &DALx,1,100); //A Y HAL_I2C_Mem_Read(&i2c, 0xD0, 61, I2C_MEMADD_SIZE_8BIT, &DAHy,1,100); HAL_I2C_Mem_Read(&i2c, 0xD0, 62, I2C_MEMADD_SIZE_8BIT, &DALy,1,100); //A Z HAL_I2C_Mem_Read(&i2c, 0xD0, 63, I2C_MEMADD_SIZE_8BIT, &DAHz,1,100); HAL_I2C_Mem_Read(&i2c, 0xD0, 64, I2C_MEMADD_SIZE_8BIT, &DALz,1,100); //G X HAL_I2C_Mem_Read(&i2c, 0xD0, 67, I2C_MEMADD_SIZE_8BIT, &DGHx,1,100); HAL_I2C_Mem_Read(&i2c, 0xD0, 68, I2C_MEMADD_SIZE_8BIT, &DGLx,1,100); //G Y HAL_I2C_Mem_Read(&i2c, 0xD0, 69, I2C_MEMADD_SIZE_8BIT, &DGHy,1,100); HAL_I2C_Mem_Read(&i2c, 0xD0, 70, I2C_MEMADD_SIZE_8BIT, &DGLy,1,100); //G Z HAL_I2C_Mem_Read(&i2c, 0xD0, 71, I2C_MEMADD_SIZE_8BIT, &DGHz,1,100); HAL_I2C_Mem_Read(&i2c, 0xD0, 72, I2C_MEMADD_SIZE_8BIT, &DGLz,1,100); do { HAL_I2C_Mem_Read(&i2c, 0x18, 0x02, I2C_MEMADD_SIZE_8BIT, &ST1,1,100); } while (!(ST1&0x01)); //0x0C - adress AK8963, 0x03-0x08 => HLx-HHz HAL_I2C_Mem_Read(&i2c, 0x18, 0x03, I2C_MEMADD_SIZE_8BIT, &HLx,1,100); HAL_I2C_Mem_Read(&i2c, 0x18, 0x04, I2C_MEMADD_SIZE_8BIT, &HHx,1,100); HAL_I2C_Mem_Read(&i2c, 0x18, 0x05, I2C_MEMADD_SIZE_8BIT, &HLy,1,100); HAL_I2C_Mem_Read(&i2c, 0x18, 0x06, I2C_MEMADD_SIZE_8BIT, &HHy,1,100); HAL_I2C_Mem_Read(&i2c, 0x18, 0x07, I2C_MEMADD_SIZE_8BIT, &HLz,1,100); HAL_I2C_Mem_Read(&i2c, 0x18, 0x08, I2C_MEMADD_SIZE_8BIT, &HHz,1,100); HAL_I2C_Mem_Read(&i2c, 0x18, 0x09, I2C_MEMADD_SIZE_8BIT, &H,1,100); //accelerometer Ax = (int16_t)(DAHx << 8 | DALx); Ay = (int16_t)(DAHy << 8 | DALy); Az = (int16_t)(DAHz << 8 | DALz); //gyroscope Gx = (int16_t)(DGHx << 8 | DGLx); Gy = (int16_t)(DGHy << 8 | DGLy); Gz = (int16_t)(DGHz << 8 | DGLz); //magnetometer Hx= (int16_t)(HHx << 8 | HLx); Hy= (int16_t)(HHy << 8 | HLy); Hz= (int16_t)(HHz << 8 | HLz); Ax_g = (float)Ax/16384.0; Ay_g = (float)Ay/16384.0; Az_g = (float)Az/16384.0; Gx_g = (float)Gx/131.0; Gy_g = (float)Gy/131.0; Gz_g = (float)Gz/131.0; printf("Ax = %f Ay = %f Az = %f Gx = %f Gy = %f Gz = %f\n", Ax_g, Ay_g, Az_g, Gx_g, Gy_g, Gz_g); HAL_Delay(200); }