Electron
-
Zawartość
54 -
Rejestracja
-
Ostatnio
-
Wygrane dni
1
Ostatnio na profilu byli





Osiągnięcia użytkownika Electron
")





-

Sejf na kod zbudowany na ATmega8
Electron odpisał w temacie użytkownika Electron • Projekty - DIY (mini)
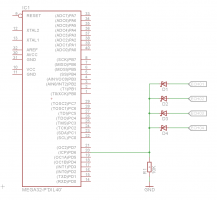
@Sabre Dzięki za zwrócenie uwagi. Rzeczywiście zapomniałem o diodzie. Już wykonałem poprawkę. -
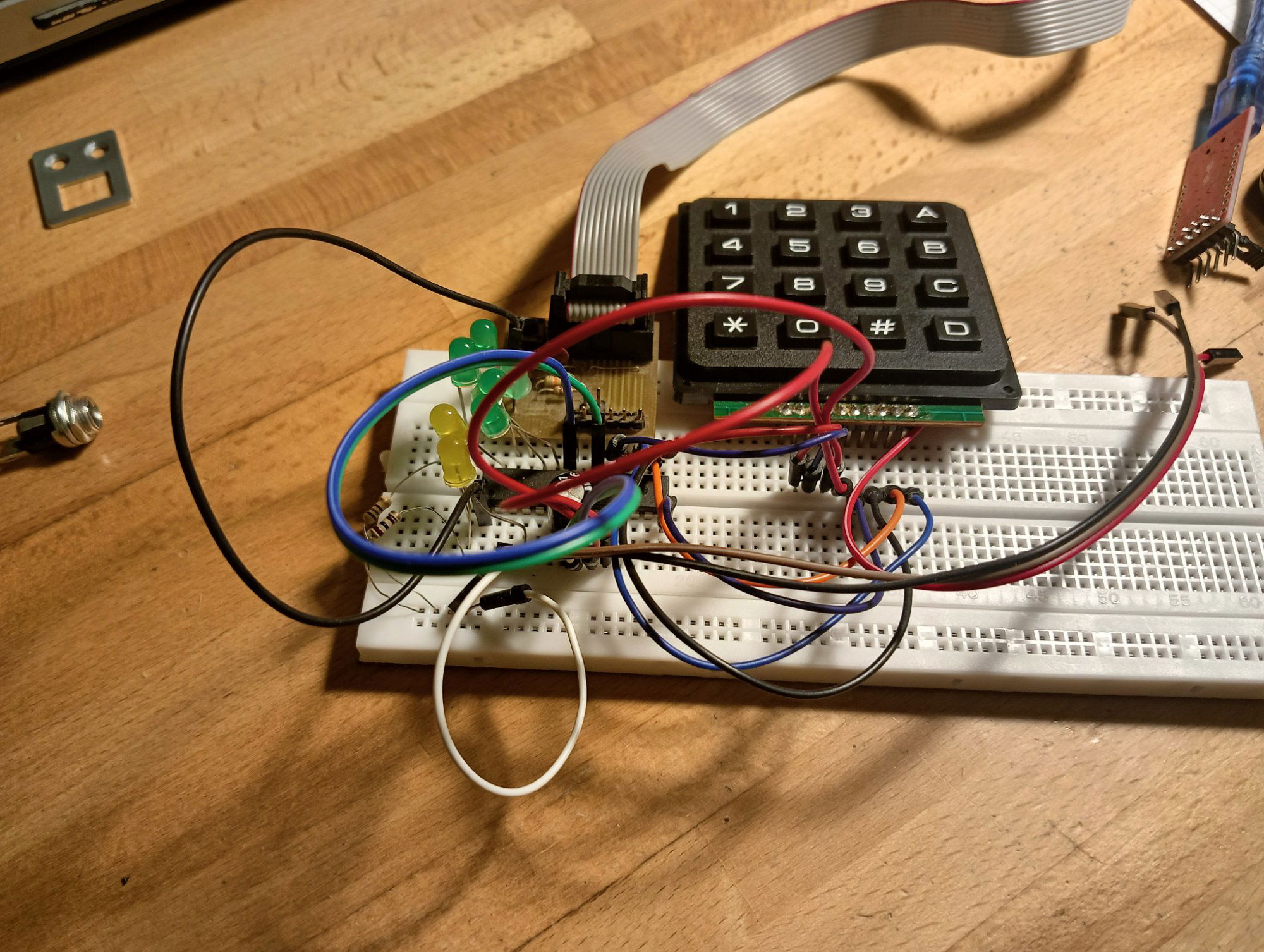
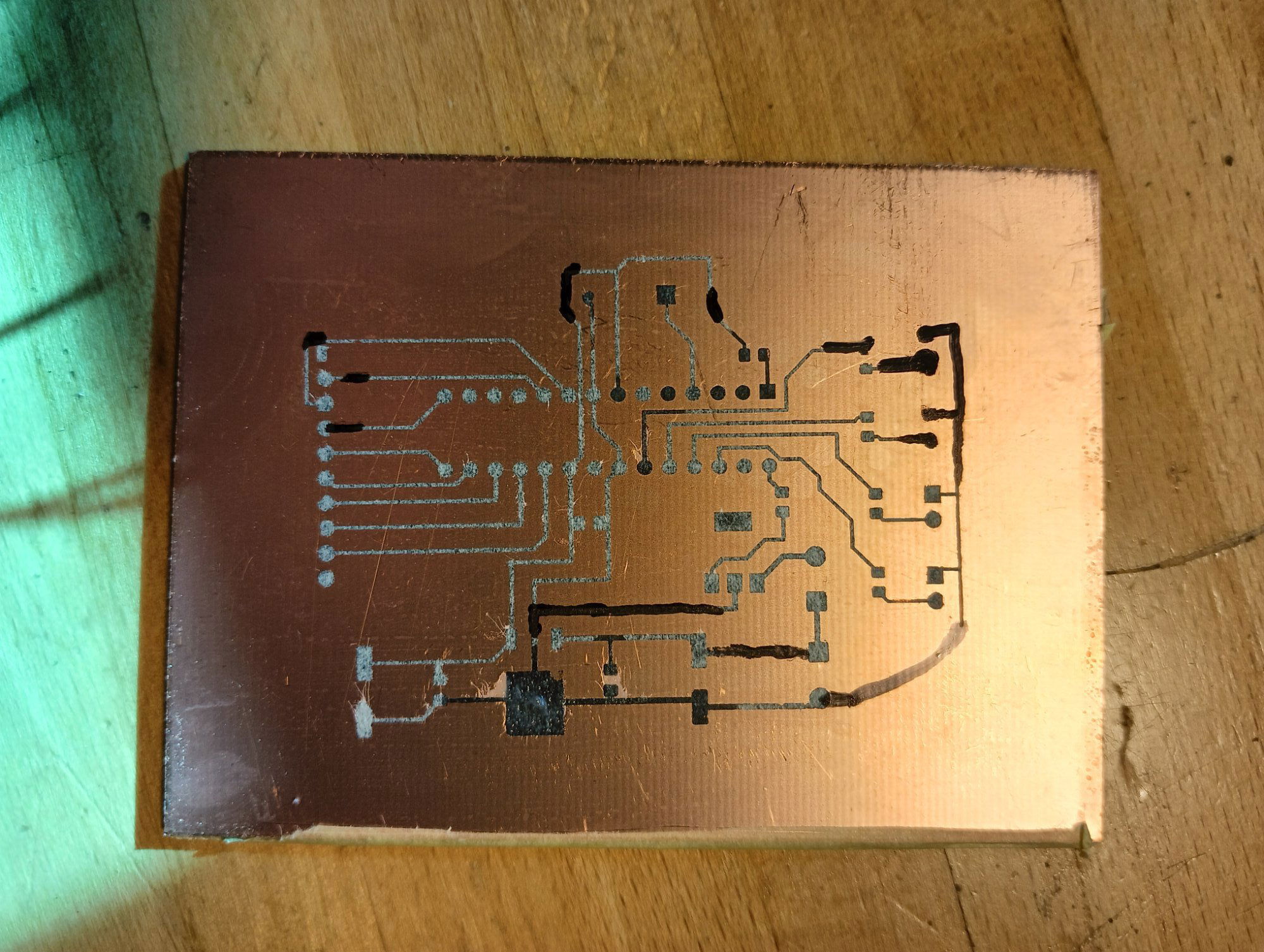
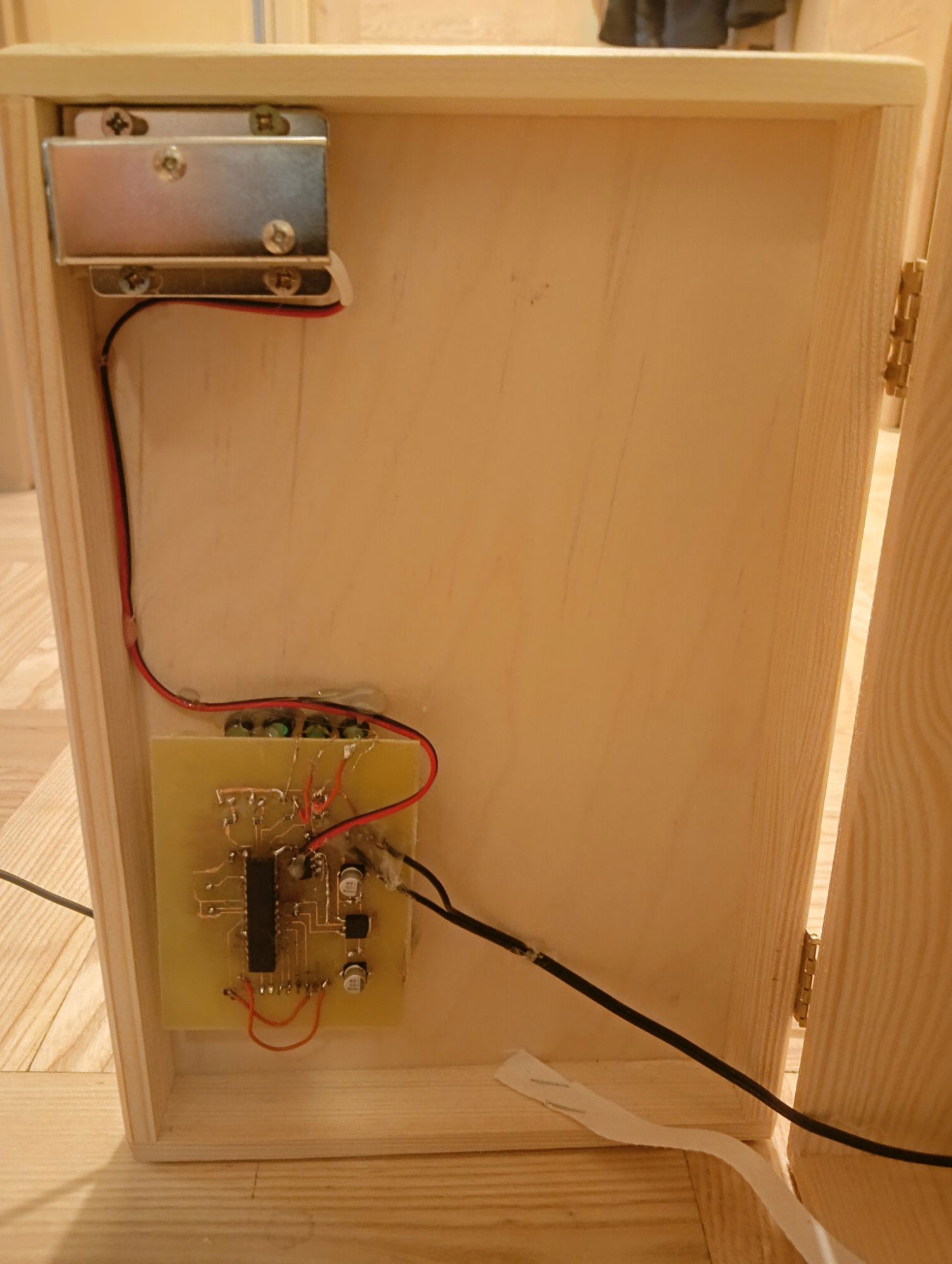
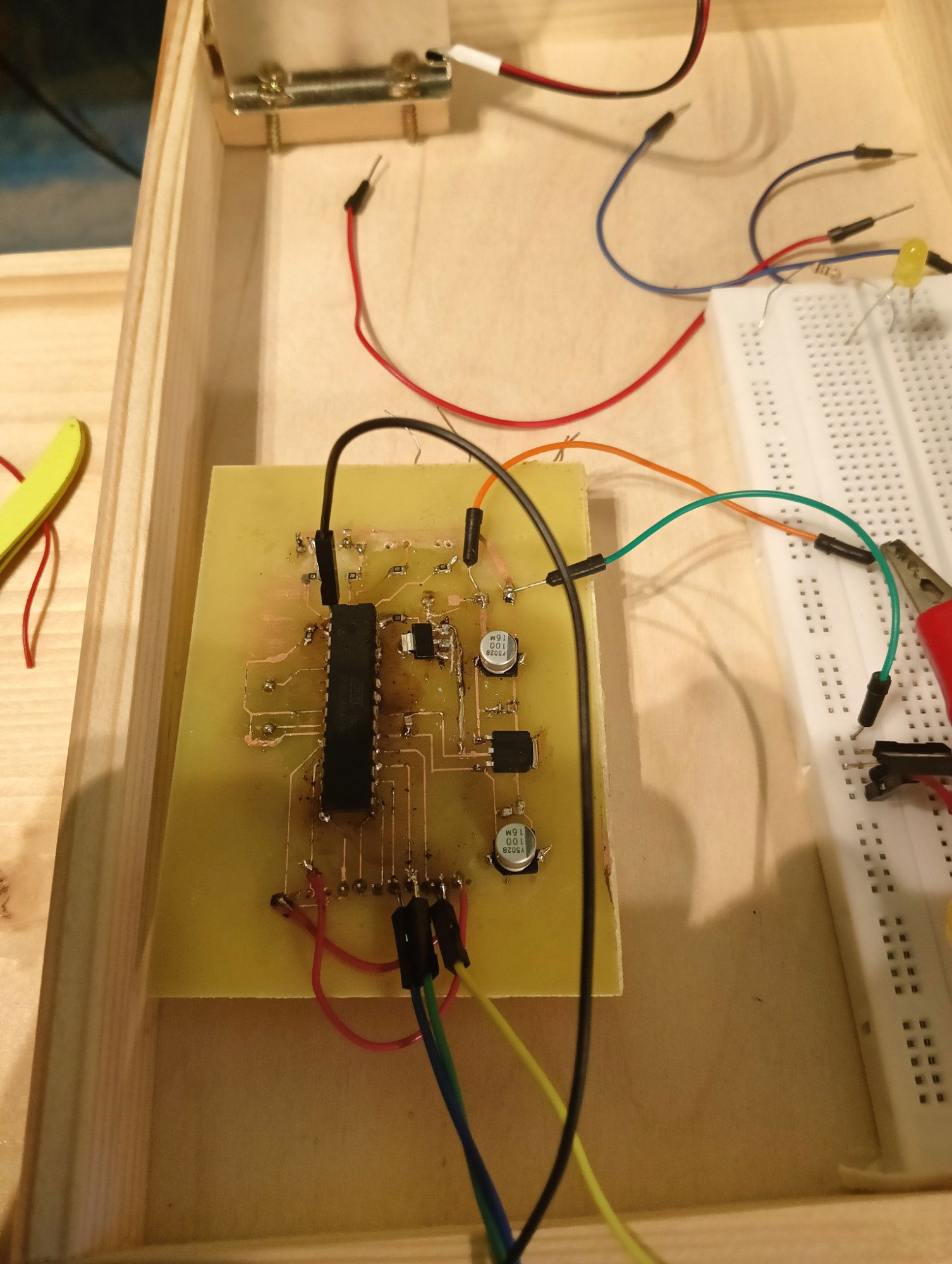
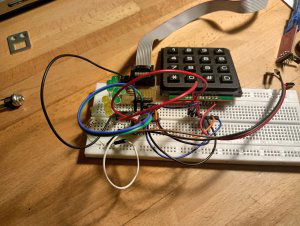
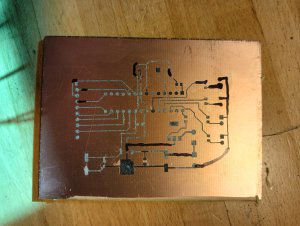
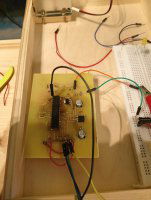
Mój młodszy brat zażyczył sobie sejf na urodziny. Stwierdziłem że zamiast kupić, mogę mu go zrobić samodzielnie. Uznałem, że podzielę się wynikami mojej pracy, aczkolwiek pomysł na własnoręczne wykonanie sejfu zaświtał mi w głowie dopiero dzień przed urodzinami, dlatego działałem pod presją czasu i musiałem posiłkować się elementami posiadanymi w warsztacie. Sercem urządzenia jest poczciwy staruszek ATmega8. Szybko zbudowałem prototyp na płytce stykowej i napisałem kod programu. Następnie zaprojektowałem PCB w programie KiCad i wytrawiłem. Niestety w pośpiechu zrobiłem kilka błędów projektowych ale na szczęście byłem w stanie wykorzystać płytkę. Po zlutowaniu i zamontowaniu klawiatury wraz z LEDami prezentuje się następująco: Aby użytkownik mógł uzyskać dostęp do sejfu musi wprowadzić prawidłowy czteroznakowy pin (klawiatura jest 4x4) . Wprowadzanie kolejnych znaków kodu jest sygnalizowane piknięciem buzzera oraz zapaleniem się kolejnej diody świecącej. Po pomyślnej walidacji kodu elektrozamek jest wyłączany na 10 sekund aby użytkownik mógł otworzyć skrzynkę. Pięciokrotne wprowadzenie błędnego pinu aktywuję minutową blokadę możliwości wprowadzania kodu dostępu. Oczywiście każde poprawne wejście resetuje licznik błędnych wprowadzonych kodów. Aby zmienić pin trzeba wprowadzić dotychczasowy pin i przytrzymać kilka sekund przycisk z gwiazdką aż nastąpi piknięcie buzzera i prowadzić nowy kod. https://bkrzeminski.pl/forbot/sejf_demo.mp4 Brat jest bardzo zadowolony, aczkolwiek nie wie o największej zalecie tego sejfu, jaką jest drugi kod dostępu "kontroli rodzicielskiej", dodany na wszelki wypadek .


-
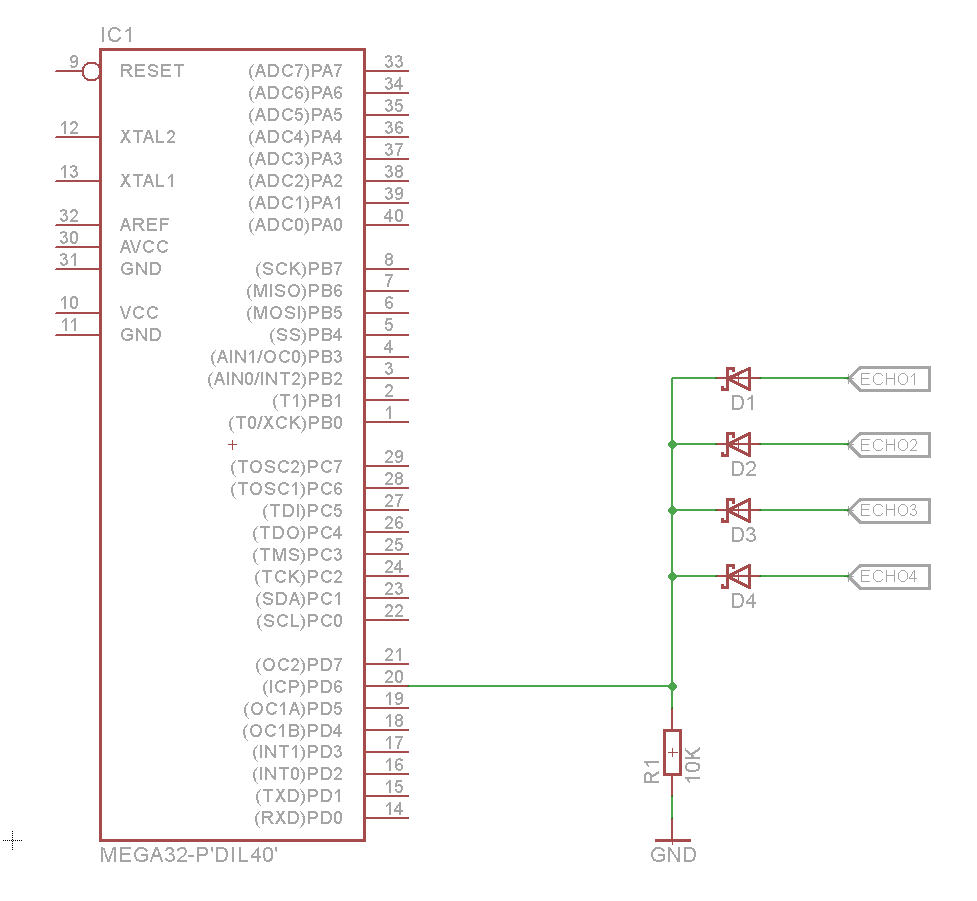
Nie jeśli będziesz korzystał po kolei z karzdego . Zrób tak : 4 piny ustaw na wyjścia trig i zrób jedno wejście echo. Czujnik szybko odpowiada więc dużych opuźnien nie będzie sprawdź w nocie.
-
Najprościej zacząć od czegośporostego na podwoziu 2-u silnikowym. Ja tez buduje robota i powoli ewoluuje projekt. Jak chcesz kamerę to odrazu pomyść o malince lub większym mikrokontrolerze i o sposobie komunikacjii. Kamera = wieksza przepustowość modułu radiowego. Na początek najlepiej komunikować się z robotem po bluetoothu. To twój projekt więc ty wiesz co chcesz. W sklepach internetowych są całe dokumentacje podwozi z silnikami i kołami. Musisz oszacować obciąrzenie, prędkość jaka chcesz uzyskać.
-
Wszystkie możliwości które podałeś jest ciężko zrealizować. Do kamerki trzeba więcej ramu więc malinka lub jakiś dobry mikrokontroler. Ogniwa Li-ion dadzą radę ale musisz wiedzieć ile prądu pomierać będzie robot. Sprawdź kurs budowy robotów https://forbot.pl/blog/kurs-budowy-robotow-arduino-wstep-spis-tresci-id18935
-
Jak chcesz zrobić drona z FPV to będzie miał raczej mały zasięg.Trzeba do tego duży przesył danych a więc większe procesory. Do tego musiałbyś mieć transciervery o dużej przepustowość no i oczywiście akcelerometr z żyroskopem.
-
Ogrzewane rękawiczki - jakie dobrać elementy?
Electron odpisał w temacie użytkownika nigraS • Zupełnie zieloni
Albo dasz 3 akumulatory szeregowo albo zastosujesz przetwornice STEP-UP 12v. -
Budowa ładowarki do akumulatora 12V na bazie LM317
Electron odpisał w temacie użytkownika Xevaquor • Zupełnie zieloni
Będziesz ładował prądem 120mA przez 10H. Z pół Amper akumulator wytrzyma ale wtedy darój sobie LM317. Będzięsz miał kaloryfer . To jest stabilizator liniowy!!! Wiec musi te 5V (19-14) zamienić w ciepło. Spróbuj znaleść jakąś przetwornicę. -
[Atmega328p] - Problem z wgraniem programu
Electron odpisał w temacie użytkownika Mike84 • Mikrokontrolery
Błąd rc=-1 oznacza ,że komputer nie gada z procesorem. Pobierz program MkAvrCalcultor https://atnel.pl/mkavrcalculator.html . i sprawdź czy działa procesor. To jest wersja demo ale jak się dogada to pokaże procesor. Zobacz jeszcze -
Podłącz większe obciążenia. Jeśli będzie znowu za wysokie to skorzystaj z e stabilizatora liniowego.
-
Wspólna masa - serwomechanizmy i Raspberry Pi
Electron odpisał w temacie użytkownika bantech • Zupełnie zieloni
Zawsze musisz łączyć masy. Masa to punkt odniesienia. Kiedy nie połączysz to kład nie będzie Ci działał. -
Budowa robota minisumo - jaki programator kupić?
Electron odpisał w temacie użytkownika eriq9 • Mikrokontrolery
Uważaj na tanie programatory, ponieważ mogą mieć w sobie stary wsad i będzie ciężej na nim pracować. Mogą nie mieć programowalnego slow SCK i wiele innych problemów programowych. Oraz mogą nie mieć buforowania linii ISP. Dobry programator to podstawa. -
Funduino Nano 3.0 (klon) - problem z wgrywaniem
Electron odpisał w temacie użytkownika jacusio65 • Arduino i ESP
Port COM u każdego może być inny. Masz ustawiony programator na Arduino as ISP. On służy do programowania procesorów AVR. Wybierz opcję AVRISP mkII -
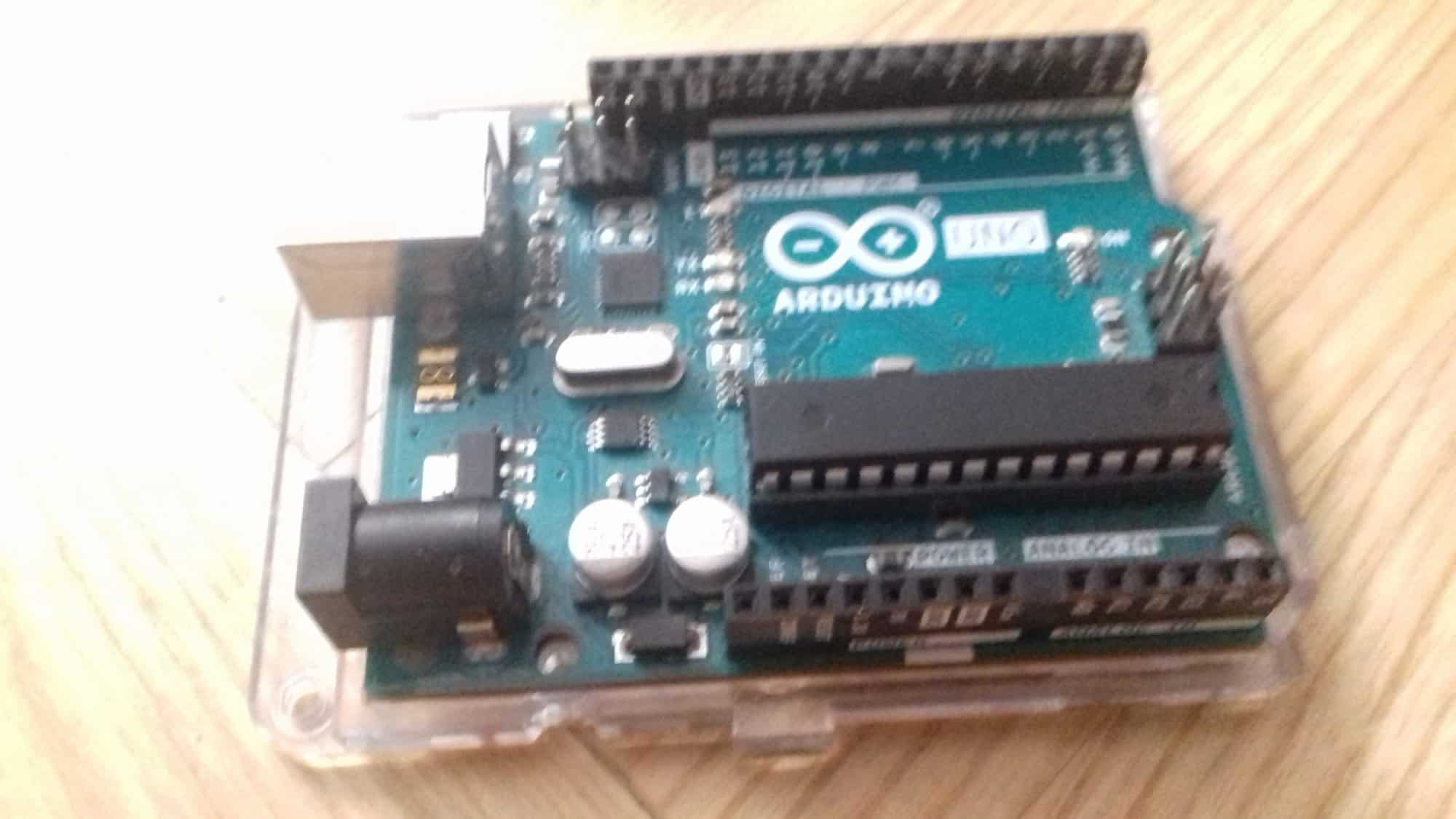
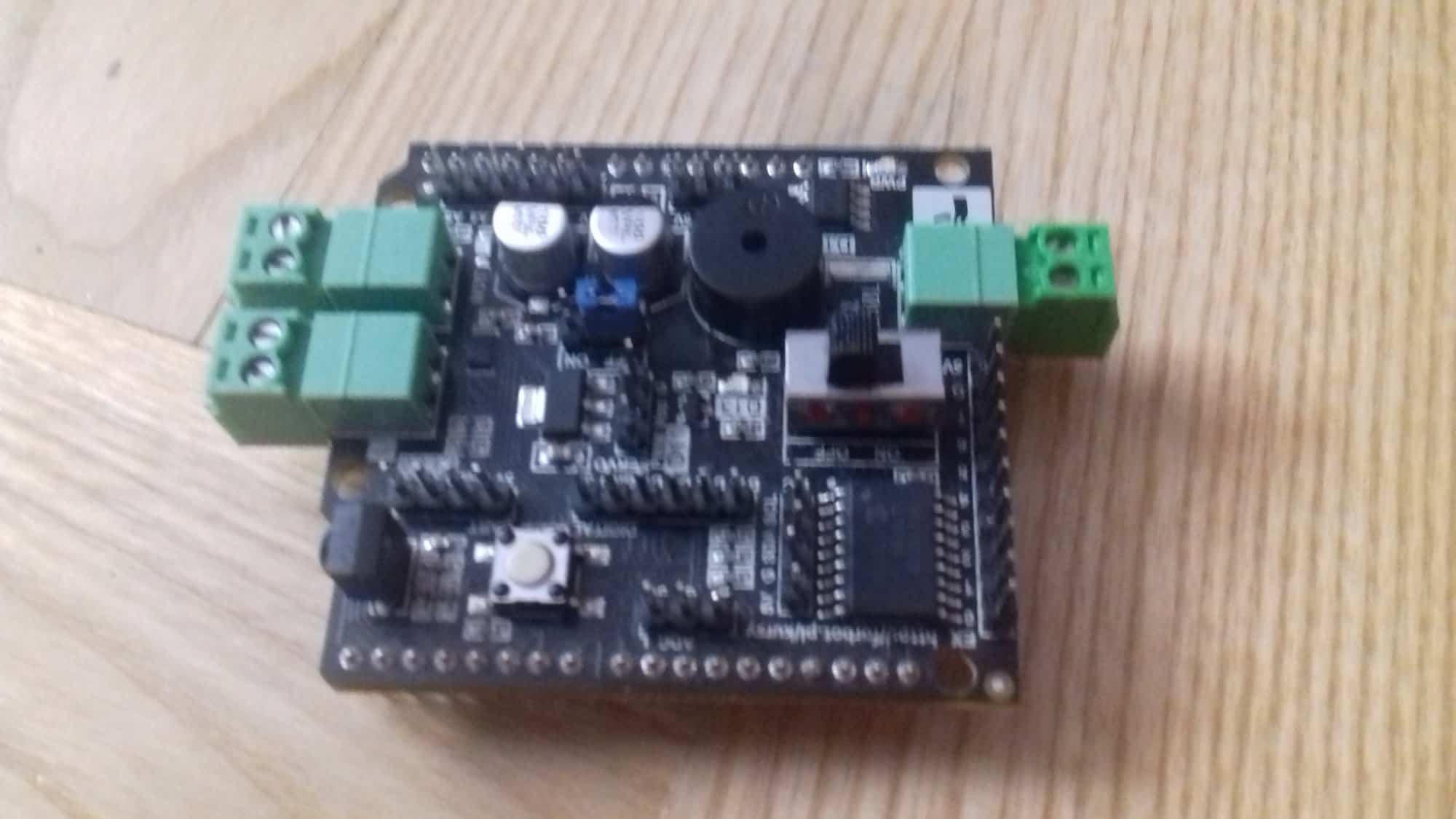
Sprzedam Używane Arduino UNO oraz Forbot Robot Shield
Electron odpisał w temacie użytkownika Electron • Sprzedam/Kupię/Zamienię/Praca
Obniżka Arduino 50zł Shield 80zł -
Sprzedam Używane Arduino UNO oraz Forbot Robot Shield
Electron opublikował temat w Sprzedam/Kupię/Zamienię/Praca
Witam z powodu tego, że przechodzę na "czyste " AVRy mam do sprzedania następujące produkty: Arduino UNO. Jest całkowicie sprawne, jedynie trochę zdrapane napisy. Używane kilka miesięcy. Cena jaka mnie interesuje to 60zł (+ ew.koszt wysyłki) . Forbot Robot Shield używane jakieś kilkanaście razy. Cena jaka mnie interesuje to 90zł (+ ew.koszt wysyłki) . Koszt wysyłki pocztą polską to 10zł lub odbiór osobisty Warszawa.