Przeszukaj forum
Pokazywanie wyników dla tagów 'poradnik'.
Znaleziono 9 wyników
-
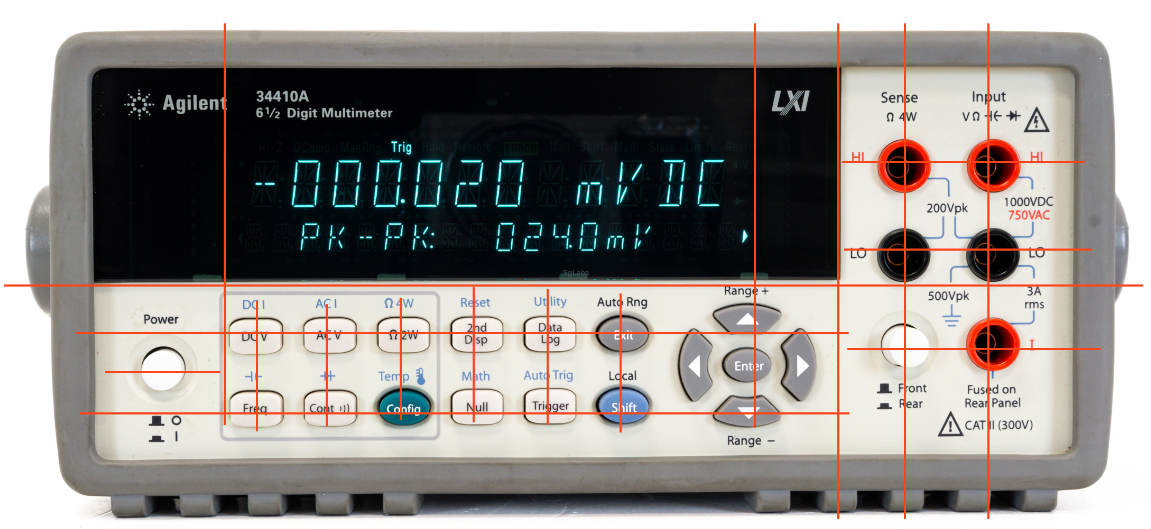
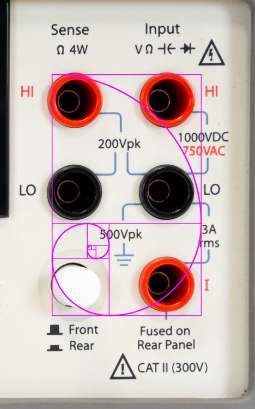
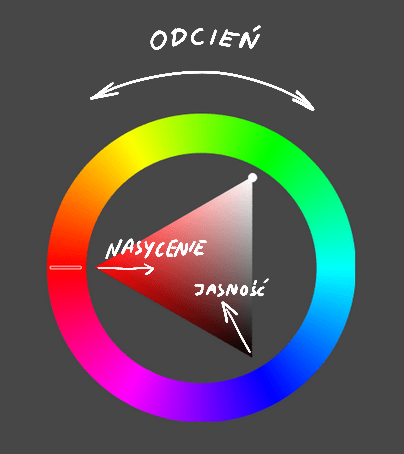
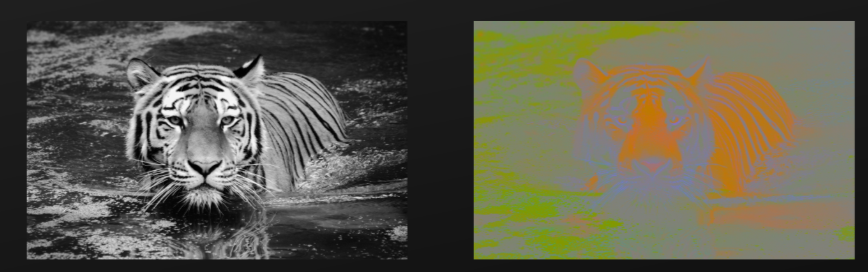
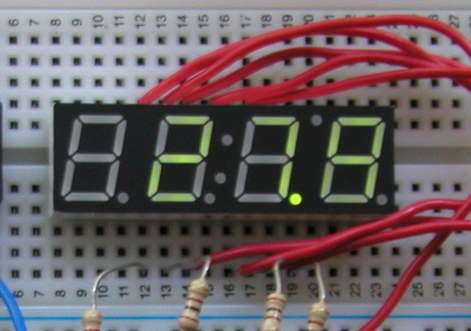
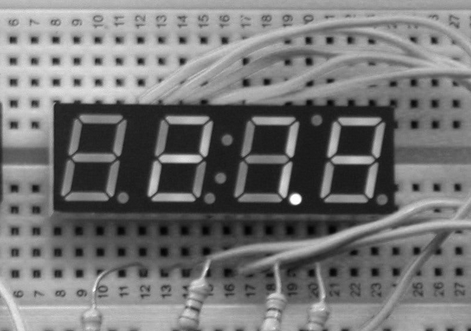
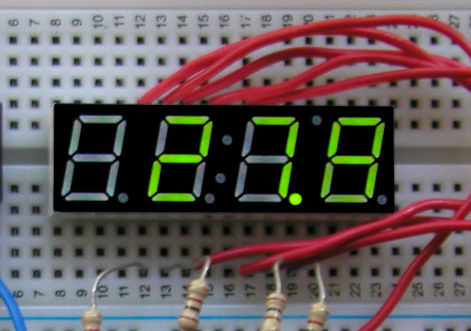
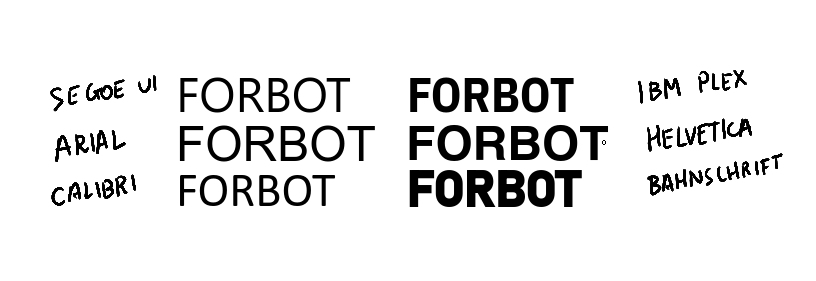
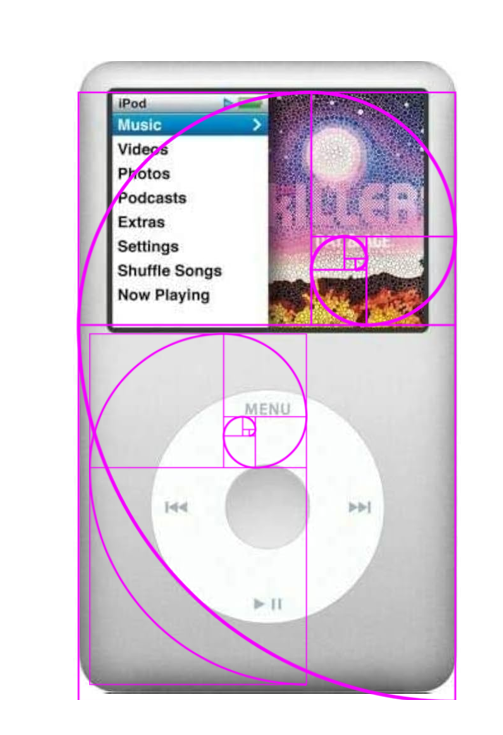
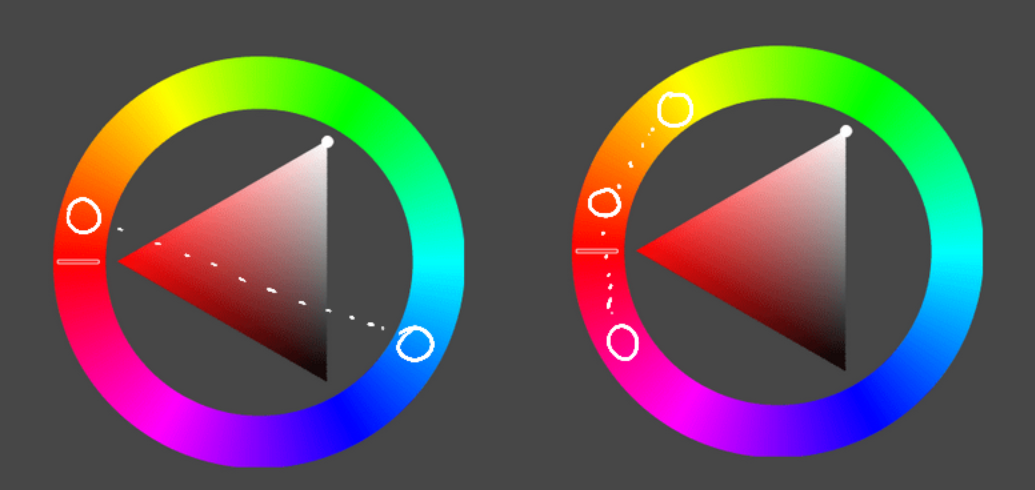
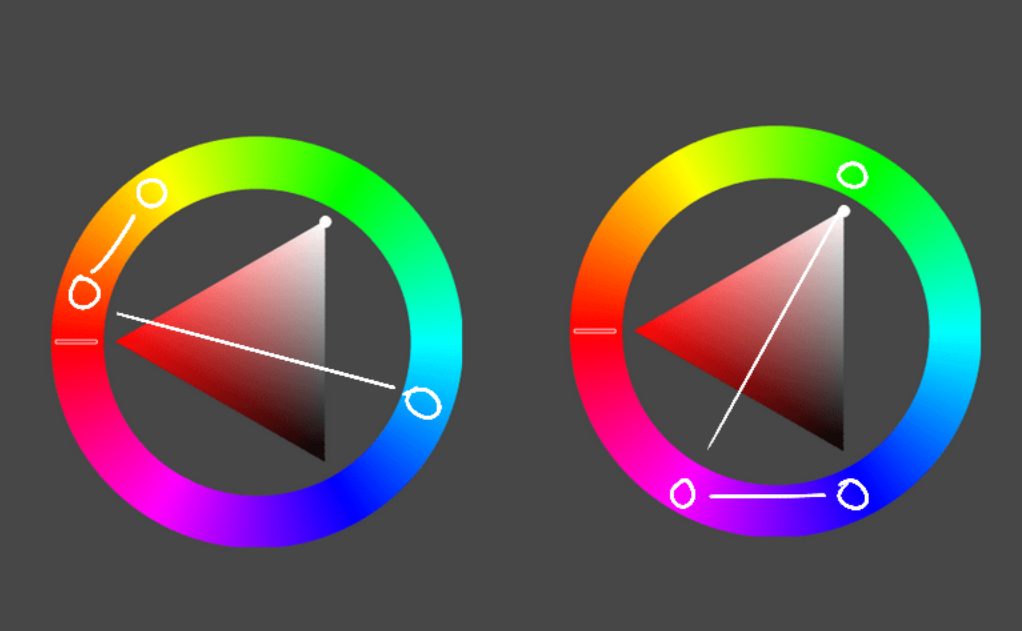
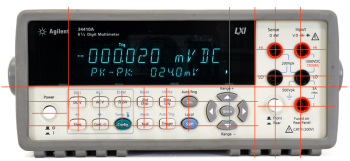
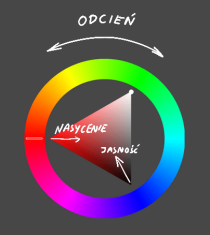
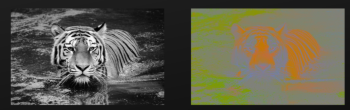
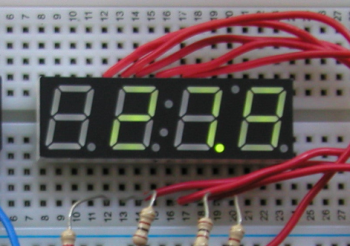
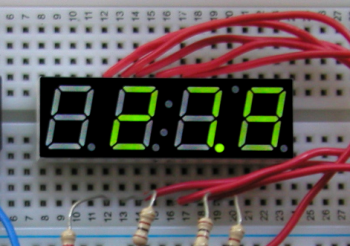
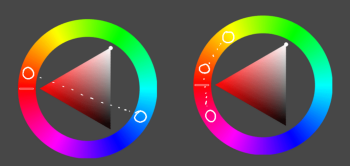
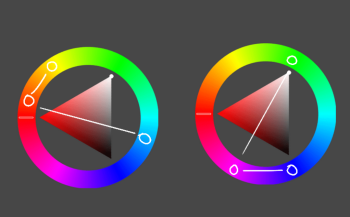
Jak można projektować estetyczne urządzenia? Projekty hobbystów często są robione z tego co jest pod ręką, na zasadzie że "ma działać", a rozwiązania tymczasowe stają się trwałe. To, co zauważyłem, to że z pomocą niewielkiej wiedzy spoza zupełnie innej dziedziny niż elektronika, można projektować urządzenia tak aby wyglądały one wręcz profesjonalne. Pomysł na artykuł wziął się stąd że nie znalazłem do tej pory poradnika który by pokazywał jak się "powinno" projektować obudowy, pisać dokumentację itp. Oczywiście - o gustach się nie dyskutuje - lecz zwykle dąży się do uzyskania produktu takiego, jaki by można kupić ze sklepu. W tym artykule postaram się przybliżyć pewne ogólne zasady i wskazówki, dzięki którym produkt najczęściej wygląda automatycznie "lepiej". Konkretnie, postaram się przybliżyć jak powinno się projektować obudowy urządzeń elektronicznych, a artykuł ten kieruję szczególnie użytkownikom początkującym. Przy odrobinie chęci można stworzyć produkt faktycznie porównywalny z tym sklepowym! Materiały Najpopularniejsze materiały wśród hobbystów to plastik, metal, oraz drewno. Wybór materiału jest ważny i powinien być dokonany we wczesnym etapie projektowania, ponieważ ma to wpływ na samą konstrukcję (ograniczenia technologiczne, założenia samego projektu itp). Drewno Drewno jest chyba teraz najrzadszym wyborem, po wkroczeniu na rynek drukarek 3D. Do odpowiedniej obróbki drewna potrzebne są konkretne narzędzia, oraz miejsce gdzie można to drewno obrobić. Nie każdy sobie na to może pozwolić. Ogólnie, wyróżniłbym dwie metody produkcji: obróbkę manualną surowca, oraz cięcie laserowe sklejki. Pierwsza metoda pozwoli uzyskać czasem bardzo ciekawy wygląd (np. steampunk, stare radia, dzisiejsze wyroby luksusowe). Niestety elementy z laserowo wycinanej sklejki najczęściej są spotykane w tanich zestawach, zabawkach itp. - stąd nie należy się spodziewać bardzo dobrego wyglądu produktu. Drewno powinno się też pokryć warstwą ochronną. Jednak jeżeli ktoś ma laser to warto pokusić się o grawerkę! Zalety: łatwość obróbki (najczęściej), łatwa grawerka, tani materiał Wady: łatwopalność, potrzebne narzędzia i miejsce do obróbki Przykładowy projekt w drewnianej obudowie Metal Myślę że dość wielu hobbystów lekceważy opcję wykonania elementów z metalu, a szczególnie z aluminium. Obudowy wykonane z metalu będą wyglądały "najbliżej" tym ze sklepu, będą wytrzymałe a sposobów na obróbkę jest wiele. Blaszkę aluminiową łatwo można obrobić tzw. dremelem i wygiąć, a jeżeli jest grubsza - można ją nawet nagwintować. Ponadto można pokusić się o sprawdzenie usług obróbki metalu w okolicy, bo wówczas opcji do obróbki jest znacznie więcej: wyginanie prasą, frezowanie, toczenie... Do tego metal można pokryć na wiele sposobów. Pomijając farby i lakiery, warto pomyśleć o usłudze anodowania aluminium jeżeli bardzo nam zależy na wyglądzie. Warstwa anody jest nie tylko ładna i przyjemna w dotyku, ale również twarda (a zatem odporna na ścieranie). Jeżeli do dyspozycji jest laser to już można bawić się na całego, i wykonywać "nadruki" które wyglądają niczym sitodruk. Napisy można jednak wykonać innymi sposobami! Jedną z nich jest dość popularny termotransfer napisów na płytę czołową, i lakierowanie; jeszcze inni wolą nakleić cały kawałek zalaminowanego wydruku. Jeżeli chodzi o dostępność materiału, jest różnie; blacha może pochodzić z recyklingu, można kupić kawałek na popularnym serwisie aukcyjnym, lub może ktoś z rodziny ma jakieś odpadki. Oczywiście można również kupić gotowe obudowy w internecie i dokonać przeróbek pod własną konstrukcję; przykład poniżej. Zalety: łatwa dostępność, wiele sposobów obróbki, wytrzymałość względem rozmiaru/wagi Wady: koszta, potrzebne narzędzia i miejsce, korekta błędów jest utrudniona po wykonaniu obudowy Aluminiowa obudowa z Ali za 40zł, frezowanie, grawerka laserowa, szybka z pleksi. Jedyne co "zdradza" projekt to tanie/standardowe pokrętło oraz elementy z drukarki 3D. Plastik W przypadku plastiku temat jest dość uproszczony dzięki drukarkom 3D. Wcześniej popularne było kupienie gotowej obudowy np. firmy Kradex, wykonanie w niej otworów, przytwierdzeniu naszej elektroniki i ewentualnie zrobienie frontu wedle uznania. Teraz jednak znacznie lepiej jest kupić drukarkę 3D i zaprojektować obudowę konkretnie pod dane urządzenie. Wiąże się to jednak z ograniczeniami - bo podczas modelowania trzeba pamiętać o ograniczeniach technologicznych - oraz tym że wydruk będzie wyglądać z bliska jak... wydruk. Jednak podczas druku np. z ABSu możliwość dalszej obróbki jest duża; tworzywo to można wygładzać mechanicznie, chemicznie, dobrze nadaje się na grawerkę laserową. Co jednak gdy potrzebny jest element przezroczysty? Lub obudowa powinna być duża, i wydruk przestaje się opłacać? Również na popularnym serwisie aukcyjnym są usługi taniego cięcia pleksi, którą można albo wkomponować do wydruku, albo z niej samej zrobić obudowę (bardzo podobnie jak ze sklejki). Połączenia oczywiście najlepiej stosować rozłączne: śruby z insertami, wkręty do plastiku, połączenia kształtowe, a w ostateczności pozostaje zawsze klejenie. Druk 3D jest również świetny do prototypowania, nawet jeżeli docelowo obudowa będzie wykonana z innego materiału. Zalety: niska cena, różnorodność materiałów i kolorów, możliwość dalszej obróbki Wady: pewne ograniczenia technologiczne, charakterystyczny wygląd Dopiero zbliżenie, lub wzięcie produktu do ręki, pokazuje defekty druku 3D Pozostałe opcje Oczywiście powyższe materiały to nie wszystko co jest do dyspozycji; w zasięgu hobbysty są również kompozyty, gięty plastik, spawanie, a nawet glina - jednak myślę że są to już tak specyficzne przypadki że jeżeli Czytelnik wie że takiego materiału potrzebuje, to jest świadomy tego wyboru. Trzeba jeszcze powiedzieć że powoli w Polsce rozwijają się Hackerspace'y, warto sprawdzić czy w pobliżu nie ma jakiegoś! Elementy wzornictwa Samo wykonanie obudowy to jedno, i prawdopodobnie poprzedni akapit był tylko powtórzeniem dla Czytelnika. Jeżeli została podjęta decyzja z czego obudowa będzie wykonana, to trzeba ją teraz zaprojektować. Zastanówmy się zatem nad przykładową obudową. Chyba najprościej jest wyobrazić sobie prostopadłościan. Trzeba zatem określić wymiary tego prostopadłościanu, tak aby montaż był komfortowy ale też aby nie marnowało się za dużo miejsca. Proporcje również odgrywają ważną rolę! Proporcjonalna obudowa powinna być nie tylko funkcjonalna ale i przyjemna dla wzroku; przykładami mogą być telefony które są płaskie i cienkie (smartfony), wąskie i grube (starsze telefony), tablety (charakterystyczne proporcje ekranu względem smartfonów). Widok telefonu nienaturalnie wąskiego, grubego bądź szerokiego jest cóż, nienaturalny. Jak te proporcje można dobrać? Pomijając intuicję, są ogólne zasady które zaraz będą przedstawione. Po dobraniu gabarytów obudowy można zastanowić się nad płytą czołową. Jest to miejsce gdzie prawdopodobnie będą osadzone kontrolki, przyciski, złącza, cokolwiek nasz projekt potrzebuje. Te również trzeba rozmieścić z pewnym porządkiem, tak aby korzystanie ze sprzętu było możliwie komfortowe, a sprzęt wyglądał tak abyśmy sami chcieli zaprosić sąsiada i się pochwalić. Dobrym sposobem tutaj jest podzielenie powierzchni siatką na równe części - a kontrolki rozmieścić w punkty przecięcia tej siatki. Nie musi być ona globalna (na całą powierzchnię), ważne jest aby zachować marginesy a konkretne kontrolki pogrupować (np. przyciski z jednej strony, złącza z drugiej). Warto pomyśleć czy korzystanie z wymyślonego przez nas projektu będzie dobre - np. umieszczenie ekranu na dole a przycisków na górze, powodowałoby że ręką zasłonięta będzie treść ekranu podczas klikania. Przykład: miernik 34410A ma elementy pogrupowane zgodnie z ich funkcją: już na pierwszy rzut oka można wizualnie rozróżnić trzy sekcje. Poszczególne elementy są rozmiszczone w siatce, z czego klawiatura jest mniej-więcej wyśrodkowana względem wyświetlacza. Sam wyświetlacz również nie zajmuje ani za dużo, ani za mało miejsca względem przycisków; sprawia to wrażenie urządzenia kompaktowego, a jednak nie miniaturowego. Niektórzy również są fanami wklejania spirali Fibonacciego tam gdzie tylko można, więc uznałem że i tutaj można się doszukać pewnego wzoru. A już szczególnie jest ona obecna w iPodzie: Co jednak gdyby się takiego "klasycznego" podejścia nie trzymać? Bardzo interesujący jest design produktów firmy Rigol: W porównaniu do poprzedniego urządzenia, tutaj można zadać bardzo wiele pytań. Co się stało z klawiaturą, czy to jest telefon? Dlaczego wyświetlacz jest taki czerwony? Czy to moda na retro? Dlaczego jeden przycisk jest poza główną sekcją a na siłę włączony do sekcji wyświetlacza, dlaczego po lewej stronie złącz jest celowa nieregularność w nadruku? Myślę że odpowiedzenie sobie samemu na takie pytania jest dobrym ćwiczeniem, czy jak kto woli, gimnastyką umysłową. Zanim jednak przejdziemy dalej, warto poświęcić chwilę czasu na przemyślenie jak obrobione mają zostać krawędzie. Opcji ponownie jest wiele, jednak najczęściej się je pozostawia ostre, sfazowane (ścięte pod kątem 45 stopni) lub zaokrąglone. Nie warto pozostawiać ostrych krawędzi jako że te niszczą się bardzo szybko i są nieprzyjemne w dotyku. Jeżeli mamy do czynienia z drukiem 3D, polecam zastosować minimalne promienie na krawędzie zewnętrzne (R1-R3) a na wewnętrzne takie jak ramki wyświetlaczy, przycisków itd - fazki. Najczęstszy błąd, i to taki że zasługuje na osobny paragraf, to zostawianie odsłoniętych ramek wyświetlacza. Dość wielu hobbystów lubi je pokazywać, podczas kiedy wszystkie urządzenia jakie można kupić komercyjnie pokazują tylko sam ekran! Ogólnie, jeżeli już mowa o estetyce, można zainspirować się sztuką i fotografią. W końcu wzornictwo przemysłowe to osobna dziedzina sztuki! Tak też można próbować zastosować zasadę trójpodziału (rule of thirds) i sugerować się taką uproszczoną siatką. Marginesy od krawędzi może z kolei zastosować ze złotą proporcją? Zasady te można stosować również przy pisaniu dokumentacji (do czego gorąco zachęcam) czy nawet materiałów "promocyjnych"! Całkiem dobrym wprowadzaniem do tematu jest ten krótki artykuł. A co jeżeli potrzebne są również kolory? Z pomocą przychodzi teoria kolorów; i te najprostsze zasady dobrze jest zapamiętać wizualnie. Kolor jaki widzimy można dzielić na wiele różnych sposobów (RGB, CMYK, HSL itp) jednak pewne zależności dobrze będzie przedstawić modelem HSV, czyli Hue, Saturation i Value. Po polsku powiemy że składowe światła to odcień, nasycenie i jasność. Na palecie kolorów tak będzie się to prezentować: Odcień (kolor) wybieramy wprost z koła kolorów. Nasycenie przechodzi od najbardziej nasyconego, do najmniej nasyconego (wówczas operujemy na przeciwległej krawędzi, w skali szarości). Podobnie jest z jasnością. Prowadzi to do bardzo ciekawych wniosków. Po lewej obrazek jest w skali szarości, a zatem wycinamy barwę (hue) oraz nasycenie (saturation). Obrazek po prawej co prawda ma już barwy, jednak wszystkie piksele są jednakowo jasne. Oznacza to, że w grafice najważniejsza jest jasność! Inny przykład wzięty z życia: Specjalnie zdjęcie to najpierw pokazałem w skali szarości. Okazuje się że zdjęcie jest "płaskie" pod względem jasności, i wizualnie wszystkie segmenty, nawet zapalone, są jednakowo "jasne". Zatem nawet pokolorowane, dalej trudno jest odczytać cyfry, choć odrobinę łatwiej (i jest to zdjęcie źródłowe): Aby uniknąć czegoś takiego nie tylko podczas projektowania ale i wykonywania dokumentacji (czyli po prostu zdjęć), polecam poniższy poradnik: Nawet jeżeli zdjęcia nie wyjdą idealne, z wiedzą z powyższego filmu spokojnie można spróbować samodzielnie skorygować kolory w zdjęciu tak aby wszystko było wyraźne i ładne: A jak samemu dobierać kolory, np. do projektu? Zasad jest kilka. Produkt może mieć stylistykę monochromatyczną - to jest, jeden kolor motywu, a pozostałe to jego odcienie. Przykładem mogą być laptopy serii ThinkPad - całe czarne, ale z czerwonymi akcentami. Następnie możemy dobierać kolory w pary. Patrząc się ponownie na koło, możemy je wybierać na dwa sposoby: Pierwszym sposobem jest dobranie kolorów komplementarnych. Są to kolory "naprzeciw siebie" na kole odcieni. Tak też czerwony się komponuje z niebieskim, fioletowy z zielonym, itd. Logo Firefoxa ma niebieskie i pomarańczowe kolory. Drugim sposobem jest wzięcie sąsiedniego koloru - dla czerwonego będzie to albo żółty (np. logo Shell) bądź różowego. Kolejnym krokiem jest wzięcie trzech kolorów: Są to tzw. triady, i wybiera się je łącząc poprzednie metody - wybieramy parę komplementarną, i sąsiada jednego z wybranych kolorów. Najpopularniejsze kombinacje to błękitny-czerwony-żółty (Burger King) bądź fioletowy-niebieski-zielony (Fanta). Jeden z kolorów powinien być głównym, drugi pomocniczy, a trzeci robić akcenty. Mimo że najczęściej urządzenia nie są tak kolorowe, warto mieć taką wiedzę z tyłu głowy. Kolejną ważną rzeczą są czcionki. Przez wielu projektantów jest to sprawa bagatelizowana, bądź robiona "na czuja" i przez to wychodzą takie rzeczy jak Comic Sans MS w sprzęcie medycznym, czy Times New Roman w zabawkach dla dzieci. Czcionka potrafi przekazać pewne emocje sobą. Oczywiście czcionkę należy zatem dobrać do projektu, więc i tutaj są pewne metody i sztuczki. Przede wszystkim należy unikać domyślnej czcionki - Arial (czasem Calibri) - aby pozbyć się efektu "ktoś zapomniał zmienić czcionki". Arial to czcionka która została stworzona jako klon czcionki Helvetica. Ta ostatnia była była często łączona z Paneuropą; szczególnie wiele starych polskich urządzeń używało tych czcionek. Wciąż przynoszą one neutralny, jednak porządny, elegancki wygląd. Helvetica dalej jest domyślna na urządzeniach firmy Apple. Bardzo dobrą czcionką która obecnie jest dołączana do systemu Windows jest Bahnschrift (stworzona na podstawie DIN1451), czcionka używana m. in. w znakach drogowych, grach studia Valve, i jak nazwa wskazuje - w kolejnictwie. Co jednak gdy potrzebna jest czcionka o bardzo konkretnym wyglądzie? Jest wiele stron oferujących darmowe czcionki jak Google Fonts czy Adobe Fonts, gdzie wiele czcionek można przetestować i następnie pobrać. Podczas projektowania urządzeń proponuję sprawdzić czy czcionka Helvetica Bold się nada (lub Bahnschrift), ze zmniejszonym odstępem między literami. Traci się niewiele na czytelności, a zyskuje wiele miejsca. Oczywiście zaproponowane czcionki też nie sprawdzą się w każdym przypadku, powiedziałbym nawet że Segoe UI może być przyjemniejsze w czytaniu długiego tekstu niż Helvetica. Jeżeli ktoś kiedyś próbował rozróżnić czcionkę Arial od Helvetici, prawdopodobnie 2 czy 3 logotypy wyglądają lepiej napisane Arialem. Co więcej, można się kłócić że Comic Sans MS może być używany w sprzęcie medycznym jako że jest to czcionka dobra dla dyslektyków. Niestety w medycynie częściej są używane czcionki pokroju Calibri czy Frutiger (to właśnie od nazwy tej czcionki wzięło się pojęcie Frutiger Aero). Inspiracje Żyjemy w takich czasach że już bardzo dużo wymyślono, i wymyślić coś nowego jest trudno. Stąd też inspirowanie się - czyli nie kopiowanie, a parafrazowanie - jest nie tylko złe, ale nawet wskazane! Jako ludzie bez doświadczenia w projektowaniu należy posiłkować się wzorem. Zatem jeżeli np. podoba mi się wygląd wzmacniacza w pokoju, nie ma problemu abym zrobił coś w podobnym stylu. Jeszcze raz powtórzę: jeżeli chcemy zrobić dobry produkt, najlepiej jest się wzorować na czymś co jest udane. Skoro wiadomo już z czego i jak wykonać nasz projekt, pozostało omówić jakich narzędzi użyć. To już zależy czysto od preferencji Czytelnika, i czasem budżetu, jednak do popularnych programów należą: - Fusion 360 od autodeska, ewentualnie OnShape do modelowania, ostatecznie FreeCAD - Inkscape (otwartoźródłowy) i CorelDraw do grafiki - GIMP (^), Krita (^), Photoshop do obróbki grafiki - Scribus (^) i InDesign od Adobe do broszurek - być może LaTeX, Word do pisania krótkiej dokumentacji? Jednak zalecam aby te pierwsze kroki, kiedy trzeba sobie wyobrazić najogólniejszy zarys przedmiotu, zrealizować na kartce. Wbrew pozorom daje to największą swobodę myślenia. I oczywiście sam ekspertem w tej dziedzinie jestem żadnym, chciałem jednak przybliżyć chociaż odrobinę tego tematu osobom które mają zapał i chęci na tworzenie własnych wynalazków. Stąd też ten artykuł jest luźnym zestawieniem uniwersalnych porad i sztuczek jakie można stosować w projektach. Powodzenia! Chciałbym szczególnie podziękować panu Salamonowi za ten artykuł, który mnie samego zainspirował lata temu do zgłębienia tego tematu. Źródła: https://simplifier.neocities.org/materials https://simplifier.neocities.org/edges https://www.youtube.com/@YTartschool Zdjęcia: https://www.proshop.pl/Images/1600x1200/2789301_25c8ddda0b3e.jpg (zdjęcie Switch Lite) https://www.reddit.com/r/raspberry_pi/comments/1btju9b/internet_kitchen_radio_i_built_using_moode_audio (zdjęcie drewnianej obudowy) https://www.sglabs.it/public/SgLabs_HP Agilent 34410A_1.jpg (zdjęcie 34410A) https://rigol.com.pl/environment/cache/images/productGfx_c6969dbf60d651666379c09404b5ed89_0_0.jpg (Rigol) https://msalamon.pl/nigdy-nie-rob-tak-z-wyswietlaczem/ (wyświetlacz z ramką) https://botland.com.pl/produkty-wycofane/903-ladowarka-li-pol-z-balanserem-redox-alpha-v2-zasilacz.html (Redox) https://content.instructables.com/F0O/EGPF/GO8DCAIF/F0OEGPFGO8DCAIF.jpg?auto=webp (wyświetlacz 7 seg) https://en.wikipedia.org/wiki/Comic_Sans#Defense (defibrylator) https://en.wikipedia.org/wiki/Frutiger_(typeface) https://m.media-amazon.com/images/I/61NJL4nUpwL.jpg (ipod) https://www.deviantart.com/practiceimagination/art/The-FASTEST-way-to-get-better-Tutorial-929107002 (tygrysy)












-
- 2
-

-
- wzornictwo
- poradnik
- (i 1 więcej)
-
 Cześć! Nazywam się Mateusz (Mati) i jestem pasjonatem elektroniki oraz programowania. Tworzę różnorodne projekty, a w tym worklogu pokażę Wam, jak stworzyć mikrokomputer od podstaw. Projekt ten ma na celu edukację, ale także możliwość stworzenia zestawu, który będzie inspiracją dla innych twórców. Dla kogo jest ten projekt: Projekt skierowany jest do osób, które chcą nauczyć się, jak od podstaw zbudować swój własny mikrokomputer o funkcjonalnościach zbliżonych do popularnych platform, ale oparty o własne rozwiązania. Zawiera zarówno szczegóły techniczne, jak i wskazówki praktyczne. Idealny dla osób zainteresowanych elektroniką, programowaniem i tworzeniem własnych urządzeń. Cel projektu: Celem projektu jest stworzenie mikrokomputera, który będzie edukacyjnym narzędziem do nauki elektroniki i programowania. Będę dokumentować cały proces: od wyboru komponentów po montaż, projektowanie PCB, instalację systemu operacyjnego oraz tworzenie prostych aplikacji. Projekt jest otwarty – możecie śledzić postępy, zadawać pytania i dzielić się swoimi pomysłami! Spis treści: Etap 1: Wybór komponentów Wybór procesora Pamięć RAM i Flash Wyświetlanie, zasilanie, interfejsy itd. Etap 2: Projektowanie schematu Procesor Pamięć operacyjna Zasilanie Pamięć Flash Wyświetlanie(HDMI) Wi-Fi Pozostałe Poprawki i weryfikacja Etap 3: Projektowanie PCB Rozmieszczenie elementów Tworzenie połączeń oraz ścieżek Weryfikacja płytki i generowanie plików produkcyjnych Zamówienie prototypu płytki oraz elementów(możliwa opcja "PCB Assembly") Etap 4: Montaż i testowanie Montowanie komponentów na płytce Testowanie stabilności Etap 5: Oprogramowanie Inicjacja Uboot(lub inne) Konfiguracja Linuxa Instalacja systemu Implementacja podstawowych aplikacji (np. edytor tekstu, terminal) Etap 6: Finalizacja projektu Ostateczne testy i poprawki Podsumowanie Koszty, czas realizacji, plany rozwoju Oszacowanie czasu: Początkujący -> 1-2 miesiące Średnio zaawansowany -> 3-6 tygodni Zaawansowany -> 2-4 tygodnie Czas całkowity: 8–12 tygodni (3–4 miesiące) Oszacowanie kosztów: Procesor -> 15-50zł Pamięć RAM -> 15-30zł Pamięć Flash -> 20-50zł Pozostałe -> 50-100zł Koszt całkowity: 150–300 zł (zależnie od wybranych komponentów) Komponenty które najpewniej użyje w moim projekcie(każdy może dostosować dla siebie): Procesor: Allwinner H3(link) Pamięć RAM: 1GB(potem zostanie dobrany odpowiedni model) Pamięć Flash: NAND Flash 8GB(potem zostanie dobrany odpowiedni model) Reszta elementów: zostaną dobrane w późniejszym etapie Podsumowanie: Ten projekt ma na celu pokazanie procesu budowy mikrokomputera od podstaw. Będę dzielił się swoimi postępami, problemami i rozwiązaniami. Jeśli chcesz się dowiedzieć, jak stworzyć coś takiego, śledź ten temat! Na bieżąco będę informować o nowościach, dodając kolejne etapy realizacji projektu.
Cześć! Nazywam się Mateusz (Mati) i jestem pasjonatem elektroniki oraz programowania. Tworzę różnorodne projekty, a w tym worklogu pokażę Wam, jak stworzyć mikrokomputer od podstaw. Projekt ten ma na celu edukację, ale także możliwość stworzenia zestawu, który będzie inspiracją dla innych twórców. Dla kogo jest ten projekt: Projekt skierowany jest do osób, które chcą nauczyć się, jak od podstaw zbudować swój własny mikrokomputer o funkcjonalnościach zbliżonych do popularnych platform, ale oparty o własne rozwiązania. Zawiera zarówno szczegóły techniczne, jak i wskazówki praktyczne. Idealny dla osób zainteresowanych elektroniką, programowaniem i tworzeniem własnych urządzeń. Cel projektu: Celem projektu jest stworzenie mikrokomputera, który będzie edukacyjnym narzędziem do nauki elektroniki i programowania. Będę dokumentować cały proces: od wyboru komponentów po montaż, projektowanie PCB, instalację systemu operacyjnego oraz tworzenie prostych aplikacji. Projekt jest otwarty – możecie śledzić postępy, zadawać pytania i dzielić się swoimi pomysłami! Spis treści: Etap 1: Wybór komponentów Wybór procesora Pamięć RAM i Flash Wyświetlanie, zasilanie, interfejsy itd. Etap 2: Projektowanie schematu Procesor Pamięć operacyjna Zasilanie Pamięć Flash Wyświetlanie(HDMI) Wi-Fi Pozostałe Poprawki i weryfikacja Etap 3: Projektowanie PCB Rozmieszczenie elementów Tworzenie połączeń oraz ścieżek Weryfikacja płytki i generowanie plików produkcyjnych Zamówienie prototypu płytki oraz elementów(możliwa opcja "PCB Assembly") Etap 4: Montaż i testowanie Montowanie komponentów na płytce Testowanie stabilności Etap 5: Oprogramowanie Inicjacja Uboot(lub inne) Konfiguracja Linuxa Instalacja systemu Implementacja podstawowych aplikacji (np. edytor tekstu, terminal) Etap 6: Finalizacja projektu Ostateczne testy i poprawki Podsumowanie Koszty, czas realizacji, plany rozwoju Oszacowanie czasu: Początkujący -> 1-2 miesiące Średnio zaawansowany -> 3-6 tygodni Zaawansowany -> 2-4 tygodnie Czas całkowity: 8–12 tygodni (3–4 miesiące) Oszacowanie kosztów: Procesor -> 15-50zł Pamięć RAM -> 15-30zł Pamięć Flash -> 20-50zł Pozostałe -> 50-100zł Koszt całkowity: 150–300 zł (zależnie od wybranych komponentów) Komponenty które najpewniej użyje w moim projekcie(każdy może dostosować dla siebie): Procesor: Allwinner H3(link) Pamięć RAM: 1GB(potem zostanie dobrany odpowiedni model) Pamięć Flash: NAND Flash 8GB(potem zostanie dobrany odpowiedni model) Reszta elementów: zostaną dobrane w późniejszym etapie Podsumowanie: Ten projekt ma na celu pokazanie procesu budowy mikrokomputera od podstaw. Będę dzielił się swoimi postępami, problemami i rozwiązaniami. Jeśli chcesz się dowiedzieć, jak stworzyć coś takiego, śledź ten temat! Na bieżąco będę informować o nowościach, dodając kolejne etapy realizacji projektu.- 2 odpowiedzi
-
- 3
-
-
- mikrokontroler
- podstawy
- (i 2 więcej)
-
Cześć wszystkim! Chciałem się z Wami podzielić pomysłem na kanał YouTube, który planuję stworzyć. Chciałbym dokumentować krok po kroku proces tworzenia mikrokomputera – od zaprojektowania schematu, przez tworzenie systemu, aż po produkcję PCB i składanie gotowego urządzenia. Moim celem jest pokazanie całego procesu, aby inni, którzy interesują się elektroniką i projektowaniem, mogli zobaczyć, jak to wygląda w praktyce. Zanim ruszę z pierwszymi materiałami, chciałem zapytać Was, czy taki pomysł wydaje się ciekawy. Co sądzicie o tworzeniu filmów, które szczegółowo przedstawiają cały proces, w tym projektowanie, lutowanie, programowanie i testowanie mikrokomputera? Myślicie, że to coś, co mogłoby zainteresować społeczność, czy lepiej skupić się na innych tematach? Myślę o krótkich filmach typu shorts, które szybko wprowadzają w temat, a później o pełnych materiałach z dłuższym omówieniem szczegółów. Czekam na Wasze opinie i sugestie!
-

Początkujący Programowanie w Python. Podstawy dla początkujących
mcsw_02 opublikował temat w Artykuły użytkowników
Języki programowania przechodziły i nadal przechodzą ewolucję – od asemblerowych instrukcji, aż po złożone systemy abstrakcji pozwalające pisać kod bliższy ludzkiemu myśleniu niż mechanicznej logice procesora. Każdy etap tego rozwoju był ukierunkowany na zwiększenie intuicyjności i efektywności procesu programowania. Wraz z rozwojem technologii zaczęto też dążyć do tworzenia języków wysokopoziomowych, w których programista mógł skupić się na rozwiązywaniu problemów zamiast na szczegółach technicznych działania sprzętu. W tym kontekście narodził się Python - język, który łączy prostotę składni z potężnymi możliwościami, zyskując popularność wśród programistów na całym świecie. W tym artykule przedstawię Ci: Historię Pythona. Zastosowanie. Filozofię i Zen Pythona. Podstawową składnię i słowa kluczowe. Czy wiedziałeś, że nazwa języka nie nawiązuje do zwierzęcia, lecz do brytyjskiego serialu komediowego Monty Python’s Flying Circus? Źródło zdjęcia. Historia języka Python Historia sięga końca lat 80., kiedy Guido van Rossum, holenderski programista, rozpoczął prace nad nowym językiem, który miał być łatwiejszy w użyciu niż dostępne wówczas alternatywy. Van Rossum czerpał inspirację z języka ABC, ale chciał stworzyć narzędzie bardziej elastyczne i wszechstronne. W 1991 roku opublikował pierwszą wersję Pythona (0.9.0), który zawierał takie elementy jak obsługa wyjątków, funkcje i podstawowe typy danych: lista, słownik, łańcuchy znaków i inne. Python 2 (wydany w 2000 roku) oraz Python 3 (w 2008 roku) – przynosiły nowe funkcje i usprawnienia. Choć Python 2 przez wiele lat był szeroko stosowany, jego wsparcie zakończyło się w 2020 roku na rzecz Pythona 3. Python został stworzony, aby ułatwić programowanie i uczynić je bardziej intuicyjnym. Źródło zdjęcia. Zastosowanie języka Python Obecnie Python znajduje zastosowanie w różnych dziedzinach – od analizy danych i sztucznej inteligencji po tworzenie stron internetowych i automatyzację. Bogaty ekosystem bibliotek i funkcjonalności języka sprawiają, że Python dynamicznie się rozwija, pozostając jednym z kluczowych języków współczesnej informatyki. 1. MicroPython i CircuitPython Python, jako język o szerokim zastosowaniu, doczekał się licznych wersji i wariantów dostosowanych do różnych platform i urządzeń. Jednym z takich przykładów są MicroPython i CircuitPython – lekkie implementacje Pythona, przeznaczone do działania na mikrokontrolerach, takich jak ESP32 czy Raspberry Pi. Dzięki współczesnym technologiom możliwe jest programowanie mikrokontrolerów prostymi językami, takimi jak MicroPython. Źródło zdjęcia. 2. Sztuczna inteligencja Jednym z najważniejszych powodów, dla których Python zyskał tak dużą popularność w środowisku algorytmów sztucznej inteligencji, jest jego przejrzystość i prostota. Python oferuje szeroki wybór bibliotek i narzędzi wspierających uczenie maszynowe oraz sztuczną inteligencję, takich jak Tensorflow oraz Keras. Dzięki Pythonowi możecie zaprojektować własną architekturę konwolucyjnej sieci neuronowej lub zaimplementować różne algorytmy sztucznej inteligencji. Chciałbyś zaprojektować własną architekturę sieci neuronowej? Python się do tego nada! Źródło zdjęcia. 3. Analiza obrazów Dzięki Pythonowi można łatwo przetwarzać obrazy, tworzyć algorytmy do analizy wizualnej oraz integrować te rozwiązania z innymi aplikacjami. Przykładowo, OpenCV umożliwia implementację algorytmów do rozpoznawania twarzy, co znajduje zastosowanie w systemach bezpieczeństwa i monitoringu. Python oferuje biblioteki umożliwiające efektywną analizę obrazu. Źródło zdjęcia. Filozofia i Zen Pythona Przed rozpoczęciem nauki Pythona warto zapoznać się z jego filozofią, która przyświecała twórcom języka i społeczności programistycznej. Python został zaprojektowany z myślą o czytelności i prostocie. Te wartości są ujęte w Zen Pythona, czyli zestawie 19 zasad przewodnich sformułowanych przez Tima Petersa. Można je wyświetlić w konsoli Pythona, wpisując: import this Fragment Zen: Beautiful is better than ugly. Explicit is better than implicit. Simple is better than complex. Complex is better than complicated… Charakterystyka Pythona i narzędzia do pisania w Pythonie Python jest językiem interpretowanym, co oznacza, że jest wykonywany bezpośrednio przez interpreter, linia po linii, zamiast być kompilowanym do kodu maszynowego przed wykonaniem. Jest również dynamiczny. Nie wymaga deklarowania typu deklarowanej zmiennej. Istnieje kilka różnych podejść do pracy z Pythonem. Zależnie od osobistych preferencji oraz specyfiki projektu powinieneś dobrać narzędzie, które będzie Ci pasowało: Interaktywny interpreter: interaktywne programowanie i testowanie kodu w czasie rzeczywistym. Edytor tekstu: możliwe jest używanie klasycznych edytorów, takich jak Vim, Emacs, czy Nano. Notatnik typu Google Colab: to świetne połączenie skryptu, tekstu i wizualizacji w jednym miejscu. Wykorzystywany często do nauki programowania lub uczenia maszynowego. Zintegrowane Środowisko Programistyczne (IDE): środowiska takie jak Visual Studio Code oferują pełną integrację z Pythonem, wtyczki do debugowania i wsparcie w pisaniu kodu. Niezależnie jaką metodę wybierzesz, znajomość podstawowej składni jest niezbędna. Źródło zdjęcia. W tym artykule będę wykorzystywał Visual Studio Code. Instalacja Pythona została tu pominięta. Przystępując do poniższej treści, powinieneś już mieć zainstalowanego Pythona oraz skonfigurowany edytor tekstu lub ulubione IDE. Otwórzmy Terminal i włączmy interaktywny interpreter. Włączenie Terminala i interaktywnego interpretera. Terminal włącza się poprzez zakładkę lub skrót klawiszowy Ctrl + Shift + `. Po włączeniu należy wpisać komendę python. Podstawowa składnia i słowa kluczowe Składnia jest podstawowym elementem każdego języka programowania, ponieważ określa zasady, które rządzą tworzeniem poprawnego kodu. Przedstawię Ci najważniejsze funkcje i słowa kluczowe. Zrozumienie tych podstawowych elementów pomoże w efektywnym tworzeniu kodu, który jest nie tylko poprawny, ale także łatwy do zrozumienia i utrzymania. 1. Deklarowanie zmiennych i podstawowe operatory matematyczne Podobnie jak w innych językach programowania istnieje możliwość deklarowania zmiennych. Tak jak wspomniałem, Python jest językiem dynamicznym. Nie ma więc potrzeby podawania typu zmiennej. >>> a = 3 >>> b = 4.5 >>> c = 3.333 >>> a + b * c 17.9985 W Python występują podstawowe operatory matematyczne: Dodawanie: + Odejmowanie: - Mnożenie: * Dzielenie: / Reszta z dzielenia: % Potęgowanie: ** Dzielenie całkowite: // >>> 5 % 2 1 >>> 3 ** 4 81 >>> 10 // 3 3 Możemy zadeklarować łańcuch znaków (napis): >>> napis = "Hello Forbot!" >>> napis 'Hello Forbot!' Napisy możemy zawierać w cudzysłowie lub w apostrofie. Nie ma to znaczenia. Do zmiennej możemy przypisać wartość logiczną i wykonywać za pomocą niej operacje. >>> logika_1 = True >>> logika_2 = False >>> logika_1 + logika_2 1 >>> logika_1 * logika_2 0 Warto zauważyć, że True oraz False można reprezentować jako kolejno: 1 i 0. 2. Kontenery danych W Pythonie występują 4 główne kontenery danych: Lista (ang. list): deklaracja nawiasami kwadratowymi. Mutowalny (zmienny) kontener. Krotka (ang. tuple): deklaracja nawiasami okrągłymi. Niemutowalny (niezmienny) kontener. Zbiór (ang. set): deklaracja nawiasami klamrowymi. Niemutowalny, nieindeksowany i posortowany kontener. Jego główną zaletą jest usuwanie powtórzeń elementów. Słownik (ang. dictionary): deklaracja nawiasami klamrowymi. Nieindeksowany kontener, który zawiera pary klucz: wartość. Elementy w słowniku się nie powtarzają. Deklaracja kolejnych kontenerów danych: >>> lista = [1, 2, 'a', ['zagniezdzona', 'lista'], 3] >>> krotka = (1, 2, 'a', []) >>> zbior = {1, 3.14, 'abc'} >>> slownik = {"jablko":"czerwony", "marchewka":"pomaranczowy", "banan":"zolty"} Możemy odwołać się do elementów po indeksach w liście i krotce. W słowniku należy podać klucz, aby odwołać się do poszczególnej wartości. Przykłady odwołań: >>> lista[2] 'a' >>> krotka[1] 2 >>> slownik["jablko"] 'czerwony' 3. Skrypty i Hello World! Czas na skrypty. Stwórzmy plik main.py i wypiszmy w konsoli Hello World! korzystając z funkcji print(). Twój pierwszy program w Pythonie: Hello World! Jeżeli wszystko jest skonfigurowane dobrze, to w terminalu lub w konsoli powinien się wyświetlić napis Hello World! W Pythonie nie ma jawnie zadeklarowanej funkcji main(), jak w C/C++. Wszystkie polecenia piszemy z góry do dołu. Instrukcje wliczające się w pętle, instrukcje warunkowe i funkcje poprzedzamy wcięciem jednego tabulatora. Nie stosuje się średników na końcu instrukcji. 4. Instrukcje warunkowe Konstrukcja instrukcji warunkowych wygląda następująco: if warunek: instrukcje elif warunek_2: instrukcje else: instrukcje Po warunkach występuje dwukropek, który oznacza, że instrukcje poniżej tyczą się tego warunku. Dodatkowo przed instrukcjami występują wcięcia. Stwórzmy skrypt, który będzie sprawdzał, czy może istnieć trójkąt o podanych bokach. Należy także sprawdzić, czy podane wartości są poprawne, tj. Czy nie są ujemne lub zerowe. Instrukcje porównania logicznego obejmują operatory or oraz and. a = 5 b = 4 c = 6 if a <= 0 or b <= 0 or c <= 0: print("Blad! Wartosci sa niepoprawne!") elif a + b > c and a + c > b and b + c > a: print("Trojkat moze istniec") else: print("Trojkat NIE moze istniec") 5. Pętle Python posiada dwa rodzaje pętli: while warunek: dopóki warunek jest spełniony, instrukcje zawarte w pętli się wykonują. for element in zbior: instrukcje związane z pętlą wykonują się dla każdego elementu w zbiorze. Z obu pętli możemy wyjść poprzez zastosowanie komendy break lub przejść do następnej iteracji słowem continue. Zaletą pętli for w Pythonie jest bezpośrednie odwoływanie się do elementów w zbiorze. Dzięki temu nie musimy martwić się o indeksy i długość zbioru. Utwórzmy skrypt, który w pętli while będzie powtarzał potęgowanie, dopóki zmienna będzie mniejsza od stu. x = 2 while x < 100: x = x**2 Zastosujmy pętlę for do iterowania po liście. Jeżeli element w liście wyniesie 0, to zliczmy ją i na końcu podajmy ilość zer w tej liście. lista_liczb = [1, 2, 0, 56, 89, 0, -1, 12, 0] licznik_zer = 0 for liczba in lista_liczb: if liczba == 0: licznik_zer = licznik_zer + 1 print(licznik_zer) Jeżeli jednak potrzebujemy iteratora, to możemy zrobić to na dwa sposoby: Chcąc iterować po konkretnych liczbach, możemy zastosować poniższą składnię: for iterator in range(start, stop, krok) Stosujemy polecenie range(), które zawiera indeks początkowy, indeks końcowy oraz krok, z jakim iterator będzie przeskakiwał po kolejnych liczbach. Pętla wykona się w zakresie od start do stop-1. Potrzebując iteratora przy liście elementów możemy zastosować polecenie enumerate(): for iterator, element in enumerate(lista_elementow) Wtedy do zmiennej iterator zostanie wpisany aktualny indeks, a do zmiennej element aktualna wartość ze zbioru lista_elementow. Skrypt wypisujący w konsoli liczby od 0 do 9: for i in range(0, 10): print(i) 6. Funkcje Funkcje służą do zwiększenia czytelności kodu niejako chowając powtarzający się kod. Definicja funkcji z dwoma parametrami odbywa się zgodnie z poniższą składnią: def nazwa_funkcji(arg_1: typ, arg_2:typ) -> typ_zwracanej_zmiennej Strzałka i typ zwracannej zmiennej jest opcjonalny. Jeżeli nie musimy podawać argumentów do funkcji, to je też możemy pominąć. Przydatnym słowem kluczowym jest pass. Stosuje się go, jeżeli będziemy implementować funkcję, ale jeszcze nie chcemy budować jej ciała. Na zakończenie parę słów o komentarzach. Standardowym komentarzem jednowierszowym jest napis poprzedzony znakiem #. Komentarze wielowierszowe poprzedzamy i kończymy trzema znakami apostrofa (‘ ‘ ‘ komentarz ‘ ‘ ‘) lub cudzysłowami (“ “ “ komentarz “ “ “). W języku Python możemy dodać opis funkcji, umieszczając go na początku jej ciała w postaci tzw. docstringa. Aby to zrobić, należy otoczyć opis potrójnymi apostrofami (''') lub cudzysłowami ("""). def wylicz_pole(bok_1: int, bok_2: int) -> int: ‘’’tu bedzie opis funkcji wylicz_pole‘’’ pass def wylicz_prad(napiecie: float, rezystancja: float) -> float: prad = napiecie / rezystancja # wyliczenie pradu return prad aktualne_napiecie = 5.45 rezystancja = 1000 aktualny_prad = wylicz_prad(aktualne_napiecie, rezystancja) print(aktualny_prad) # wypisanie pradu Oprócz wszystkich wymienionych przeze mnie funkcji i słów kluczowych istnieje jeszcze wiele przydatnych elementów języka Python, takie jak lambda, with, yield. Gorąco zachęcam Cię do szczegółowego zapoznania się z tym językiem, bo znajdzie zastosowanie w wielu projektach. Podsumowanie Python to wszechstronny język programowania, który zyskał popularność dzięki swojej prostocie i czytelnej składni. Python jest używany w wielu dziedzinach, w tym w analizie danych, sztucznej inteligencji, web development i automatyzacji. Dzięki bogatej bibliotece standardowej oraz licznym zewnętrznym modułom Python jest idealnym narzędziem zarówno dla początkujących, jak i zaawansowanych programistów. Warto się z nim zapoznać, ponieważ jego elastyczność i wsparcie społeczności sprawiają, że jest jednym z najważniejszych języków programowania na świecie.







- 2 odpowiedzi
-
- 1
-
-
- Programownie
- python
- (i 2 więcej)
-
Pneumatyka odgrywa kluczową rolę w dzisiejszym przemyśle, będąc podstawą wielu systemów automatyzacji, robotyki oraz procesów produkcyjnych. Zrozumienie zasad działania układów pneumatycznych nie tylko pomaga w projektowaniu wydajnych i niezawodnych systemów, ale również otwiera drzwi do innowacyjnych rozwiązań technicznych. Pneumatyka znajduje zastosowanie w branżach, gdzie kluczowe znaczenie ma szybkie i niezawodne działanie systemów, a także tam, gdzie użycie energii elektrycznej lub hydraulicznej jest mniej efektywne, lub niebezpieczne. Jednym z narzędzi, które mogą Ci przybliżyć pneumatykę oraz jej zastosowanie jest program FluidSIM pozwalający na symulację schematów i systemów pneumatyki, hydrauliki i elektryki. W tym artykule przedstawię Ci: Do czego służy pneumatyka? Czym jest FluidSIM? Funkcjonalności FluidSIM. Komponenty dostępne w FluidSIM. Przykład symulacji. Pneumatyka to ciekawa i względnie łatwa dziedzina, która może urozmaicić wiele twoich projektów! Źródło zdjęcia. Do czego służy pneumatyka? Pneumatyka to dziedzina inżynierii, która zajmuje się wykorzystaniem sprężonego powietrza do wykonania pracy mechanicznej. Stosuje się ją w różnych branżach do napędzania, sterowania i automatyzacji procesów. Na liniach produkcyjnych znajdziemy maszyny przemysłowe, którymi mogą być prasy pneumatyczne korzystające z powietrza do generowania siły przy docisku. Roboty przemysłowe korzystają z pneumatycznych przyssawek, którymi podnoszą i transportują elementy produkcyjne. Technologia sprężonego powietrza znajduje zastosowanie w wielu branżach. Poniżej przedstawiam ciekawe i praktyczne zastosowanie pneumatyki: 1) Pneumatyczne mięśnie, które poruszają się kołami. Miękka robotyka to dział robotyki, który zajmuje się tworzeniem robotów przy użyciu rozciągliwych materiałów. W tej dziedzinie bardzo użyteczna jest pneumatyka, dzięki której można poruszać kończynami robotów. Grupa badawcza Mazzeo stworzyła miękkiego robota mobilnego wykorzystującego powietrze do napędzania kół w robocie. Robot jest w całości elastyczny, co sprawia, że nie ma żadnych sztywnych części, dzięki czemu może bezpiecznie upadać z wysokości. Mobilny robot pneumatyczny. Źródło zdjęcia. 2) Miękki robot wydrukowany w 3D. Podobnym zastosowaniem robotyki miękkiej jest wykorzystanie jej przy stworzeniu czworonożnego robota kroczącego. Zespół z Uniwersytetu Kalifornijskiego w San Diego zastosował pneumatykę w zginaniu kończyn robota, który potrafi poruszać się po nierównym terenie. Pneumatyczny robot kroczący. Źródło zdjęcia. 3) Roboty przemysłowe z pneumatycznymi przyssawkami. Pneumatykę chętnie stosuje się w robotyce przemysłowej. Roboty wyposażone w przyssawki pneumatyczne precyzyjnie podnoszą i przenoszą elementy, dzięki zastosowaniu sprężonego powietrza. Robot może efektywnie manipulować ładunkami o różnych kształtach. Robot przemysłowy wyposażony w przyssawki pneumatyczne. Źródło zdjęcia. 4) Siłowniki pneumatyczne Jednym z najpopularniejszych zastosowań pneumatyki jest zastosowanie sprężonego powietrza w siłownikach pneumatycznych. Poprzez doprowadzenie lub odprowadzenie powietrza do odpowiedniej komory w konstrukcji tego urządzenia, siłownik wykonuje liniowy ruch mechaniczny, co można wykorzystać do manipulacji obiektami lub generacją siły nacisku. Siłowniki to bardzo ważne elementy wykorzystywane w rozwiązaniach pneumatycznych. Źródło zdjęcia. Pneumatyka umożliwia konstrukcji takich jak elastyczne roboty kroczące czy mobilne. W przemyśle pozwala na precyzyjne manipulowanie obiektami za pomocą przyssawek pneumatycznych. Istotnym elementem pracy z takimi urządzeniami jest także symulacja tych systemów. Jednym z narzędzi, które służy do symulacji układów pneumatycznych jest FluidSIM. Czym jest FluidSIM? Jest to oprogramowanie od Festo, które służy do symulacji układów pneumatycznych, hydraulicznych i elektrycznych. Dzięki niemu możemy zaprojektować i zasymulować układ pneumatyczny ze sterowaniem elektrycznym. Oprogramowanie jest bardzo proste i intuicyjne. Jednym z głównych atutów programu jest jego przejrzysty interfejs i metoda projektowania oparta na symbolach, które można łatwo łączyć, tworząc funkcjonalne układy. To sprawia, że FluidSIM jest idealnym narzędziem zarówno dla początkujących, którzy dopiero uczą się zasad działania systemów pneumatycznych i elektrycznych, jak i dla bardziej zaawansowanych użytkowników, chcących szybko prototypować swoje rozwiązania. Program FluidSIM dysponuje szeregiem elementów, których zachowanie można symulować. Źródło logo Festo: FluidSIM Pneumatics V 4.0. Ponadto elementy dostępne w oprogramowaniu posiadają zmienne parametry. Pozwala to na symulację rzeczywistych parametrów urządzeń. Funkcjonalności FluidSIM W artykule opisano funkcjonalności związane z wersją czwartą oprogramowania. FluidSIM oferuje nie tylko możliwość rysowania schematów, ale także ich symulację, co pozwala na pełne testowanie zaprojektowanych układów. Symulację można zatrzymywać i wykonywać krok po kroku. W parametrach symulacji dostępna jest zmiana kolorystyki niektórych elementów (kolor linii ze sprężonym powietrzem/bez, kolor wskazań elementów pod napięciem, kolor próżni). Oprócz tego można modyfikować szybkość symulacji i kompatybilność z Siemens LOGO!Soft. Parametry symulacji. Przykład prostej symulacji. Zgodnie z kolorystyką możemy założyć, że linie, które symbolizują przewody pneumatyczne, są pod ciśnieniem. Po załączeniu zaworu rozdzielającego powietrze znalazło się w komorze siłownika, skutkując wysunięciem tłoczyska. Podczas symulacji istnieje możliwość zapisywania stanów urządzeń w poszczególnych chwilach. Umożliwia to State Diagram. Wygenerowany podczas symulacji diagram funkcyjny. Diagramy funkcyjne można rysować ręcznie za pomocą Functional diagram. Przykład narysowanego diagramu funkcyjnego. Możliwa jest konfiguracja i zmiana parametrów elementów i urządzeń. Oprócz tego w oknie konfiguracyjnym dostosujemy zewnętrzne obciążenia oraz profile siły. Konfiguracja siłownika. W prawym dolnym rogu okna jest widoczny podgląd elementu po zmianie. Parametry siłownika. Znajdziemy tutaj między innymi średnicę tłoka, kąt montażu lub pozycję początkową tłoka. Ustawienie parametrów jest ważne pod kątem testu układu, gdy chcemy zaimplementować rozwiązanie z określonymi urządzeniami. To oczywiście nie są wszystkie dostępne funkcjonalności programu. Oprogramowanie oferuje również materiały edukacyjne na temat pneumatyki oraz wiele więcej, w tym bogatą bibliotekę komponentów. Komponenty FluidSIM FluidSIM oferuje bogaty zestaw urządzeń i komponentów, które umożliwiają tworzenie oraz testowanie zaawansowanych układów. Poniżej znajdziesz listę elementów, które mogą okazać się przydatne podczas projektowania. 1. Źródła oraz elementy związane z doprowadzaniem powietrza. Źródła oraz elementy zasilające w FluidSIM zapewniają dostęp do sprężonego powietrza oraz jego odpowiednie przygotowanie. Dzięki temu możliwe jest tworzenie kompletnych układów, które można następnie odwzorować w rzeczywistych warunkach. Źródło sprężonego powietrza. Zespół przygotowania powietrza. Zespół przygotowania powietrza. Filtr. Chłodnica. Dostępne elementy źródła zasilania pneumatycznego i elementy pokrewne. 2. Urządzenia wykonawcze Pneumatyczne urządzenia wykonawcze to elementy układów pneumatycznych, które przekształcają energię sprężonego powietrza na ruch mechaniczny. Odpowiadają za realizację określonych czynności, takich jak przesuwanie, podnoszenie, dociskanie czy obracanie elementów. Siłownik pneumatyczny jednostronnego działania ze sprężyną. Siłownik pneumatyczny dwustronnego działania. Silnik pneumatyczny o dwóch kierunkach przepływu. Dostępne elementy wykonawcze. Należy pamiętać, że można zmieniać parametry urządzeń i elementów. Na przykład siłownik jednostronnego działania ze sprężyną można przekształcić na dwustronnego działania bez sprężyny i na odwrót. 3. Zawory Istnieje wiele zaworów pneumatycznych, które mają zastosowanie w pneumatyce. Jedne z najpopularniejszych to rozdzielające, dławiąco zwrotne i logiczne. FluidSIM je implementuje i umożliwia za ich pomocą sterowanie pośrednie układami. Zawór rozdzielający 3/2. Zawór dławiąco zwrotny. Zawór podwójnego sygnału (logiczne AND). Część dostępnych zaworów. Dostępnych jest o wiele więcej. Podobnie jak elementy wykonawcze zawory są w pełni konfigurowalne. Konfiguracja zaworu rozdzielającego. 4. Układy elektryczne FluidSIM oferuje symulację elektrycznych układów sterowania. Biblioteka symboli zawarta w programie zawiera bogatą kolekcję elementów, takich jak: przyciski, sensory, przekaźniki, styki, a nawet sterownik PLC oraz regulator PID. Zasilanie elektryczne. Generator funkcyjny. Przycisk. Cewka elektryczna. Moduł logiczny (coś w rodzaju PLC). Regulator PID. Jak widzisz, istnieje wiele elementów i modułów, z których możesz skorzystać. Każdy z nich pełni określoną rolę i może zostać użyty do budowy złożonych symulacji. Kluczem jest ich odpowiednie połączenie i wykorzystanie, aby stworzyć coś funkcjonalnego i interesującego. Zastanówmy się, jak połączyć te moduły w spójną całość i stwórzmy symulację pewnego układu. Przykład symulacji Stwórzmy uproszczoną symulację obrabiarki detali. Urządzenia ma działać z następującym algorytmem: Urządzenie po włączeniu nie wykonuje żadnych ruchów. Po wciśnięciu przycisku START rozpoczyna się proces obrabiania. Jeżeli w którymkolwiek momencie działania algorytmu zostanie wciśnięty przycisk STOP, to wszystkie urządzenia się wyłączają. Siłownik dociska detal do stołu. Po dociśnięciu detalu włącza się silnik elektryczny i zaczyna obrabiać detal. 3 sekundy po załączeniu silnika rozpoczyna się proces wyłączania. W tym momencie wyłącza się silnik. Po 2 sekundach od wyłączenia silnika siłownik wraca na swoją początkową pozycję. Jeżeli masz dostęp do FluidSIM, to spróbuj wykonać taki układ i przeprowadzić kilka symulacji. Jedno z rozwiązań problemu. Powyżej znajduje się jedno z możliwych rozwiązań tego zadania. Po wciśnięciu przycisku START załączy się stycznik K1 podtrzymujący cały proces oraz cewkę K2, która załącza siłownik pneumatyczny. Siłownik ma dwie pozycje. Pozycja ‘A’ to pozycja początkowa, a ‘B’ to pozycja końcowa. Dojazd tłoczyska do pozycji ‘B’ powoduje załączenie się styku ‘B’, który jest stykiem wyłącznika drogowego, co powoduje dołączenie zasilania na silnik. Silnik zaczyna się obracać i obrabiać materiał. W tym momencie załącza się czasówka K3, która po 3 sekundach rozwiera styk NC K3. W rezultacie silnik się zatrzyma. W tym samym czasie zwiera się styk NO K3, który załącza przekaźnik czasowy K4. Ten odlicza 2 sekundy i po tym czasie tłok wraca do swojej pierwotnej pozycji przez rozwarcie styku NC K4 w układzie po lewej stronie. Jeżeli wciśniemy przycisk STOP podczas działania układu, to cały proces zakończy się przed jego ukończeniem. Przykład działania rozwiązania. Podsumowanie Pneumatyka jest kluczową dziedziną inżynierii, mającą szerokie zastosowanie w automatyce przemysłowej, robotyce oraz wielu innych branżach. Współczesne narzędzia, takie jak FluidSIM, umożliwiają modelowanie i testowanie układów pneumatycznych, hydraulicznych i elektrycznych bez potrzeby fizycznej budowy prototypów. Dzięki temu można nie tylko sprawdzać poprawność działania projektów, ale także optymalizować je pod kątem wydajności i oszczędności energii. Warto pamiętać, że nauka symulacji i projektowania w FluidSIM to nie tylko sposób na lepsze zrozumienie pneumatyki, ale także doskonała okazja do rozwijania umiejętności inżynierskich.



































-
- 1
-

-
- automatyka
- Robotyka
- (i 2 więcej)
-

Poradnik Połączenia zasilaczy - szeregowo? równolegle?
H1M4W4R1 opublikował temat w Artykuły użytkowników
Wstęp Ten artykuł jest skierowany do użytkowników, którzy chcieliby połączyć kilka zasilaczy razem, aczkolwiek zastanawiają się jak to zrobić bezpiecznie. Autor nie ponosi odpowiedzialności za wszelkie usterki i szkody wynikające ze stosowania zamieszczonych tu treści. Fotografia 1: Zdjęcie poglądowe zasilacza typu SMPS (Flickr, Marco Verch, CC BY 2.0) Rodzaje połączeń Zasilacze możemy łączyć szeregowo i równolegle – i zanim ktokolwiek powie, że to niebezpieczne: jest to bezpieczne o ile zachowa się pewne środki ostrożności. Wyróżniamy trzy główne rodzaje połączeń: PP (Parallel Power) – równoległe połączenie w celu zwiększenia mocy wyjściowej PR (Parallel Redundancy) – równoległe połączenie w celu zabezpieczenia układu w przypadku uszkodzenia jednego (lub większej ilości) zasilaczy SC (Series Connection) – połączenie szeregowe w celu zwiększenia napięcia wyjściowego. Parallel Power Rysunek 2: połączenie równoległe zasilaczy W teorii możemy wykorzystać ten rodzaj połączenia z każdym zasilaczem, aczkolwiek rezultaty mogą nie być satysfakcjonujące. Niektórzy dostawcy oznaczają zasilacze jako kompatybilne z PP, aczkolwiek tak zdecydowanie nie jest (pozdrawiamy przyjaciół z Chin). Problemem w tym trybie jest to, by prąd między zasilaczami był dzielony jak najrówniej – co innymi słowy przekłada się na identyczną impedancję i napięcie wyjściowe obu zasilaczy w danej chwili. Znając nasz świat możesz łatwo się domyślić, że nie jest to proste zadanie – wpływ na te czynniki ma np. tempratura czy wiek zasilacza. Dodatkowo w czasie rozruchu i przeciążenia zasilacze mogą zachowywać się nieprzewidywalnie. Niezbalansowany pobór prądu może spowodować przedwczesne starzenie się niektórych zasilaczy w układzie, a co za tym idzie zmniejszyć niezawodność systemu. Producenci wprowadzili wiele różnych technik, by zapobiec takim efektom np. LSB (Load Share Bus) – zasilacze komunikują się między sobą (dostępne najczęściej w najbardziej zaawansowanych modelach) – np. NPS2400 SRA (Specific Regulation Algorithms) – tanie rozwiązanie, które pozwala na dopasowanie parametrów wyjściowych na bazie algorytmów, co przekłada się na naturalny podział prądu między jednostkami – np. NPST501 ARM (Active Redundancy Module) – zewnętrzny moduł redundancyjny pozwala na zbalansowanie impedancji wyjściowej zasilaczy – każdy zasilacz powinien móc być zastosowany z tym rozwiązaniem, aczkolwiek najlepiej to przetestować Zasady implementacji połączenia PP: Uwzględnij dostępną moc systemu (nie powinieneś sumować mocy wyjściowej zasilaczy, ale sumę pomnożyć przez 0.75-0.8 – nie ma idealnych połączeń). Używaj identycznych modeli zasilaczy – najlepiej z tej samej serii fabrycznej Używaj tylko zasilaczy z trybem Constant Current (inne mogą powodować problemy) Niektóre zasilacze posiadają opcję CC, która jest wyłączona. Zalecane jest jej włączenie. Ogranicz ilość zasilaczy w układzie (najlepiej < 4) Umieść zasilacze możliwie blisko siebie (w takich samych warunkach wilgotności / temperatury, by zredukować wpływ otoczenia) Przed połączeniem ustaw napięcie wyjściowe zasilaczy – podłącz je do obciążenia w wysokości ok. 10% nominalnego. Napięcia powinny być ustawione z dokładnością +/- 20mV. Użyj takich samych przewodów (długość i grubość) między każdą jednostką i obciążeniem. Przewody powinny skupiać się przy obciążeniu, a nie przy zasilaczach – to poprawia symetrię obciążenia. NIE STOSUJ TOPOLOGII DAISY-CHAIN! Po 30 minutach działania zweryfikuj obciążenie prądowe i dostosuj napięcia, by je zbalansować. Parallel Redundancy Rysunek 3: połączenie redundancyjne zasilaczy z diodami Rysunek 4: połączenie redundancyjne zasilaczy z modułem ORing Redundancja jest istotna w przypadku urządzeń krytycznych dla danej architektury. Zabezpiecza ona przed niezapowiedzianą awarią modułu, który może spowodować zagrożenie – zarówno dla ludzi jak i dla maszyn. Dzięki tej technice połączenia maksymalny prąd jest dostępny nawet po wystąpieniu awarii zasilacza, co zapobiega ewentualnym wyłączeniom sprzętu – co za tym idzie należy wykorzystać w tym celu kilka zasilaczy. Oprócz tych zasilaczy należy dodać też zasilacze "nadmiarowe" (redundancyjne) – przynajmniej jeden. Im więcej ich użyjemy tym większe będzie nasze zabezpieczenie przed awariami. By osiągnąć niezawodny system redundancyjny wyprowadzenia zasilaczy powinny być odseparowane modułem ORing (redundancji) lub odpowiednimi obwodami (diodami / tranzystorami MOSFET). Jeżeli jeden z zasilaczy ulegnie uszkodzeniu i zacznie stanowić zwarcie, to obwody te zabezpieczą przed przepływem prądu do uszkodzonego zasilacza, a co za tym idzie spadkowi napięcia i maksymalnej mocy układu. Zasady implementacji połączenia "PR": Ustal ile potrzebujesz nadmiarowych zasilaczy, by osiągnąć zadowalający poziom redundancji. Uwzględnij, iż w danym momencie tylko jeden zasilacz może przyjąć na siebie całe obciążenie (jest to istotne w przypadku modułów Oring, które posiadają określone limity natężenia i napięcia). Zawsze używaj identycznych zasilaczy (najlepiej z tej samej serii). Postaraj się zbalansować napięcie wyjściowe zasilaczy do +/- 20mV – wydłuży to żywotność systemu. Umieść wszystkie zasilacze w tych samych warunkach środowiskowych (temperatura, wilgotność etc.) Użyj identycznych przewodów (długość / grubość), które skupiają się przy obciążeniu – to poprawia symetrię obciążenia. Series Connection Rysunek 5: Połączenie szeregowe zasilaczy Niektóre zastosowania jak np. moduły EuroRack mogą wymagać zastosowania połączenia szeregowego zasilaczy. Takie połączenie pozwala uzyskać napięcie, bądź moc niedostępną dla pojedynczego modułu. Warto mieć na uwadze: Największy dostępny prąd jest równy najmniejszemu prądowi nominalnemu zasilacza w układzie Maksymalna moc jest efektem iloczynu sumy napięć i najmniejszego prądu nominalnego zasilaczy. Jednostki o różnej impedancji / źródłach zasilania / napięciach wyjściowych / mocy mogą być połączone szeregowo. Zasady implementacji połączenia SC: Postaraj się użyć identycznych jednostek (najlepiej z tego samego źródła) Zwróć uwagę na niezbędne dostępne natężenie prądu (by zapobiec przeciążeniu zasilaczy) Niektóre jednostki mogą mieć inny czas rozruchu. By zapobiec odwrotnej polaryzacji należy zastosować diody zabezpieczające (maksymalne napięcie diody powinno być większe niż suma napięć zasilaczy, a maksymalny prąd impulsowy diody powinien być większy niż największe nominalne natężenie zasilacza w układzie). Uważaj, gdy pracujesz z napięciami >60V, które mogą być niebezpieczne dla człowieka. Dopasuj przewody do parametrów układu i połącz je w topologię DAISY-CHAIN w stronę obciążenia. Unikaj używania zbyt dużej ilości zasilaczy (aka. > 4). Inne uwagi Warto sprawdzić, czy zasilacze są odizolowane (czy uziemienie i linia neutralna nie są połączone z masą napięcia DC) – czasami zdarzają się zasilacze, które nie spełniają tych wymogów (mimo, iż naruszają tym przepisy bezpieczeństwa) - jeżeli nie są, to nie należy ich stosować w żadnym z powyższych połączeń! O ile to możliwe unikaj konfiguracji PP, gdyż potrafi ona być bardzo nieprzewidywalna. Jeżeli tworzysz systemy, których działanie jest istotne zastosuj układ redundancyjny.




-
Poradnik Mikrokontroler i Ty - jak wybrać układ do projektu?
H1M4W4R1 opublikował temat w Artykuły użytkowników
Wstęp Ten artykuł porusza tematykę doboru mikrokontrolerów do Twojego projektu. Nie jest istotne czy tworzysz prosty sterownik LED, narzędzie do pracy, czy zaawansowane urządzenie pomiarowe. Z tymi wskazówkami bez problemu znajdziesz odpowiedni komponent dla siebie. Artykuł jest kierowany do osób stawiających swoje pierwsze kroki w projektowaniu własnych systemów, które potrzebują podstawowych informacji "na co zwrócić uwagę" podczas wyboru elementu do potrzeb projektowych oraz listy potencjalnych alternatyw. Mikroprocesor, mikrokontroler, FPGA Zanim zgłębimy detale, warto zrozumieć główne rodzaje komponentów, które są kluczowymi jednostkami obliczeniowymi w projektach. Mikroprocesory: To stosunkowo złożone komponenty, które nie posiadają wbudowanej pamięci RAM ani ROM (w kontekście pamięci programu). Były popularne w komputerach domowych, takich jak Commodore 64 czy Atari 2600 pod koniec XX wieku. Charakterystyczne dla nich jest posiadanie magistrali równoległej do podłączenia pamięci i innych układów pomocniczych – nie posiadają wbudowanych peryferiów. Mikrokontrolery: To podzespoły elektroniczne, które zawierają wbudowaną pamięć RAM, a często także pamięć programu (ROM). Istnieją również wersje bez wbudowanej pamięci ROM, takie jak RP2040 lub ESP32D0/ESP32S0. W przypadku braku pamięci programu użytkownik musi dołączyć zewnętrzną pamięć, zazwyczaj wykorzystując interfejs QSPI. FPGA (Field-Programmable Gate Array): To zaawansowane układy do równoległego przetwarzania danych i prototypowania układów scalonych. W projektach hobbystycznych są powszechnie wykorzystywane przy obsłudze wyświetlaczy o dużej rozdzielczości lub w konstrukcji urządzeń diagnostycznych. Ich charakterystyczną cechą jest zdolność do wykonywania wielu operacji jednocześnie, co przewyższa możliwości mikrokontrolerów i mikroprocesorów. SoC (System on a Chip): To samodzielne układy zawierające pamięć RAM i ROM. Nie zawsze możliwe jest zapisywanie w pamięci ROM (czasem zawiera tylko instrukcje bootloadera, a program wgrywamy na kartę SD lub pamięć EMMC). Mimo, że niektóre mikrokontrolery można określić jako SoC, ten termin zazwyczaj odnosi się do zaawansowanych układów, które spotykamy w minikomputerach SBC (Single-Board Computers). Poniższa fotografia 1 przedstawia przykładowy mikrokontroler w obudowie TQFP: Fotografia 1 (Wikipedia, Public Domain) Podstawowe cechy mikrokontrolerów Przed wyborem układu właściwego dla naszego projektu, warto zwrócić uwagę na kilka kluczowych cech. Nie ma tu sztywnej hierarchii, ponieważ ich istotność zależy od konkretnych potrzeb projektowych: Rodzina / architektura: Określa używane środowisko programistyczne oraz narzędzia, takie jak kompilatory i debuggery. Często producenci mikrokontrolerów prześcigają się w udostępnianiu coraz bardziej zaawansowanych narzędzi dla projektantów urządzeń i programistów. Package / Obudowa: Określa liczbę wyprowadzeń i sposób montażu (w tym jak bardzo przy tym będziemy się denerwować) Peryferia: Lista wewnętrznych podzespołów mikrokontrolera, takie jak dostępne magistrale, wsparcie dla protokołów, zegary, DMA czy przetworniki ADC/DAC. RAM i ROM (Flash): Określają dostępną przestrzeń dla programu i zmiennych. Niektóre układy wymagają zewnętrznej pamięci Flash (np. RP2040, ESP32, ESP8266) ADC / DAC: Wbudowane peryferia do obsługi sygnałów analogowych – ADC dla wejść analogowych, a DAC dla wyjść analogowych. Zasługują na osobną sekcję, gdyż często wpływają na wybór układu. Taktowanie i zestaw instrukcji: Określa szybkość działania mikrokontrolera. Niektóre nowsze rdzenie mogą być wydajniejsze, nawet przy niższym taktowaniu, dzięki nowszym zestawom instrukcji. Napięcie zasilania: Definiuje pobór prądu mikrokontrolera, a również konieczność zastosowania konwerterów poziomów logicznych między układem, a zewnętrznymi peryferiami. Architektury mikrokontrolerów Obecnie na rynku wyróżnia się cztery główne „rodziny” mikrokontrolerów: ARM: Te mikrokontrolery, zasilane głównie napięciem 3,3V, są niezwykle wszechstronne i popularne. Bez względu na projekt z pewnością znajdziesz odpowiedni model dla siebie. AVR: Starsza rodzina mikrokontrolerów, wykorzystywana głównie tam, gdzie kluczowa jest niezawodność. Osiągają pełną wydajność przy zasilaniu 5V. Xtensa (ESPressif ESP32/ESP8266): Chińska rodzina mikrokontrolerów na bazie architektury Xtensa, zaprojektowana głównie dla aplikacji IoT. Warto zauważyć, że nie wszystko, co pochodzi z Chin, jest złej jakości, co udowadnia ten układ. RISC-V: To dość nowa otwarta architektura, wykorzystywana do tworzenia zarówno mikrokontrolerów, jak i procesorów. Układy oparte na tej architekturze są podobne do ARM, ale znajdują się w niższym przedziale cenowym ze względu na brak opłat licencyjnych. Jak dokonać wyboru? Często warto zacząć od tego, co już znamy. Jeśli mieliśmy do czynienia z mikrokontrolerami STM32, sensownym krokiem będzie znalezienie w tej rodzinie układu spełniającego nasze potrzeby, a jeżeli go nie znajdziemy to poszukiwanie innego mikrokontrolera na bazie architektury ARM. Jeżeli używaliśmy Arduino Uno to bliżej nam może być do AVR. W innym przypadku, dobieramy układ z dowolnej rodziny, która odpowiada nam pod względem pozostałych kryteriów. Package / Obudowa Mikrokontrolery występują w różnych rodzajach obudów, od tradycyjnych do montażu przewlekanego po nowoczesne, przeznaczone wyłącznie dla montażu powierzchniowego. Wybór obudowy najczęściej zależy od umiejętności lutowniczych. DIP – obudowy przewlekane, najprostsze do przylutowania (wystarczy lutownica transformatorowa, aczkolwiek znacznie wygodniej jest pracować z lutownicą kolbową) SOP, QFP, TQFP, LQFP – obudowy SMT z wyprowadzonymi nóżkami, proste do lutowania z wykorzystaniem grotu typu „minifala” QFN – obudowy SMT z wyprowadzeniami na boku obudowy (bez nóżek) – dość skomplikowane do lutowania grotem minifala (wykonalne, lecz czasochłonne). Najlepiej lutować je gorącym powietrzem lub w specjalistycznym piecu do lutowania rozpływowego. BGA – obudowy SMT z kulkami pod układem. Bardzo trudne do lutowania amatorskiego (wymagają wprawy). Układy te należy lutować wyłącznie z użyciem gorącego powietrza lub pieca do lutowania rozpływowego. Weryfikacja jakości spoin jest praktycznie niemożliwa. Istnieją również gotowe moduły np. ESP32 WROOM czy Arduino Nano, aczkolwiek w tym zestawieniu omawiamy wyłącznie tematykę mikrokontrolerów jako układów scalonych, a powyższe moduły do takich nie należą, ale warto ich używać w fazie prototypowania, gdyż znacząco skracają czas lutowania. Fotografia 2 przedstawia układy logiczne w obudowach DIP, a fotografia 3 zaś pamięć RAM z układami scalonymi w obudowach BGA. Fotografia 2 (Wikipedia, Public Domain) Fotografia 3 (Wikipedia, Smial, CC BY-SA 2.0) Dobrą praktyką jest wybór obudowy z większą liczbą wyprowadzeń niż potrzebujemy (czasem w trakcie projektu okazuje się, że ich brakuje). W bardziej optymistycznym scenariuszu, większa ilość nóżek ułatwi nam wyprowadzenie ścieżek z układu podczas projektowania płytki PCB, jednakowoż należy mieć na uwadze, iż ze wzrostem ilości wyprowadzeń znacząco wzrasta cena układu. Peryferia? Rozważenie potrzebnych peryferii jest kluczowe. Na przykład, jeśli chcesz stworzyć kontroler PID do sterowania grzałkami, potrzebujesz interfejsu do termopary - to może być wejście analogowe albo magistrala, jak np. SPI do podłączenia wzmacniacza MAX6675. Dodatkowo będziesz potrzebować licznika sprzętowego do generowania sygnałów sterujących grzałką. Na powyższym przykładzie widać, iż to, czego potrzebujesz, zależy od konkretnego projektu. W prostych projektach jak ten wymieniony wyżej wystarczy zwykły, najprostszy mikrokontroler - np. CH32V003. Jeśli zaś marzysz o stworzeniu konsoli do gier, potrzebne będzie coś znacznie bardziej potężnego, np. STM32H7*, który ma większą moc obliczeniową i bardziej zaawansowane funkcje, jak wbudowany układ graficzny czy obsługa pamięci zewnętrznej SDRAM. Jakie peryferia i parametry warto mieć na uwadze? Ilość pinów/wyprowadzeń mikrokontrolera (GPIO): Związana z potrzebnymi wyprowadzeniami, jak i zajętymi pinami przez magistrale (I2C, SPI itp.). Magistrale komunikacyjne (I2C, SPI, UART/USART/LIN, CAN, USB): Pomagają w sprzętowej obsłudze komunikacji z innymi modułami, oszczędzając moc obliczeniową mikrokontrolera. Przetworniki ADC: Potrzebne, gdy chcesz mierzyć sygnały analogowe, np. temperaturę na termistorze. I2S/SAI: Jeśli chcesz, by twoje urządzenie miało wbudowany dźwięk (warto zauważyć, że potrzebny będzie zewnętrzny układ do obsługi dźwięku – tzw. „kodek”). Przetworniki DAC: Wbudowany przetwornik cyfrowo-analogowy, który pozwala generować sygnały analogowe bez zewnętrznych układów. DMA – służy do sprzętowego przesyłania danych z pamięci RAM do konkretnego rejestru (nie musi tego robić program), co jest znacznie szybsze, a zarazem oszczędza moc obliczeniową RTC(C) – niektóre mikrokontrolery posiadają wbudowany zegar czasu rzeczywistego i kalendarz, które w przypadku zasilania bateryjnego są w stanie określić aktualną datę. Przydatne w projektach automatycznych zraszaczy czy lampek zapalanych o konkretnej godzinie. To tylko fragment listy, aczkolwiek pokazuje, jak duży wpływ na projekt ma wybór odpowiednich peryferii. Jak widać na 11 stronie niniejszego dokumentu niektóre mikrokontrolery posiadają naprawdę rozbudowane peryferia, a to jest układ „z niższej półki”. Dobrą praktyką jest stworzenie projektu systemu (w formie diagramu funkcjonalności urządzenia), który następnie określi nam jakie elementy sprzętowe będą nam niezbędne (również pozwoli określić pomocnicze układy scalone, lecz jest to temat na inny artykuł). Pomocne mogą być również podobne projekty zrealizowane przez inne osoby oraz dokumentacja układów w nich zastosowanych. Przykładowy projekt systemu ukazuje rysunek 4. Rysunek 4 (źródło własne) RAM/ROM Każdy mikrokontroler ma swoje ograniczenia, szczególnie jeśli chodzi o pamięć programu. Z reguły, tańsze mikrokontrolery mają mniej pamięci programu lub w ogóle jej nie posiadają, wymagając zewnętrznego układu. Dla większości projektów, minimalna ilość pamięci ROM wystarcza. Jednak w bardziej skomplikowanych projektach, jak wspomniana wcześniej konsola do gier, może okazać się, że standardowa pamięć nie wystarczy. Wybór odpowiedniej ilości pamięci ROM jest często kwestią doświadczenia - po prostu nabiera się wprawy. Tu sprawa jest jeszcze trudniejsza. Wiele zmiennych można przenieść poza pamięć RAM, co może znacząco ułatwić życie. Zazwyczaj ilość pamięci RAM rośnie wraz z ilością peryferii w mikrokontrolerze. Oczywiście, jeśli wybraliśmy mikrokontroler bazując tylko na peryferiach, bez uwzględnienia pamięci, to może okazać się, że tej pamięci nam zabraknie (szczególnie w rodzinie AVR, gdzie jest jej mniej), aczkolwiek jest to bardzo rzadko spotykane zjawisko. Warto mieć na uwadze, że bardziej zaawansowane mikrokontrolery posiadają możliwość rozbudowania pamięci RAM za pomocą zewnętrznego układu scalonego (np. W25Q128 lub MT48LC4M32B2B5). Sygnały analogowe – DAC/ADC Czasem chcemy zbudować proste urządzenie diagnostyczne bez używania zewnętrznych przetworników. Tutaj pomocne są peryferia analogowe (o których już wspomnieliśmy). Istotne w ich przypadku są dwa parametry: Rozdzielczość: To, jak dokładnie jest przekształcany sygnał cyfrowy na analogowy. Na przykład, przetwornik 8-bitowy z napięciem referencyjnym 1V ma skok równy 0,0039V między kolejnymi wartościami, zaś przetwornik 16-bitowy o identycznym napięciu referencyjnym ma znacznie dokładniejszy skok w wysokości 0,000015V. Istnieją również przetworniki o wyższej dokładności (24bit, 32bit), które są dedykowane głównie systemom audio. Sample Rate (SPS): To, jak często przetwornik dokonuje odczytów lub zmiany. Przykładowo, 1MSPS oznacza, że przetwornik może odczytywać lub zmieniać swój stan około milion razy na sekundę. W diagnostyce sygnałów o wysokiej częstotliwości (np. w oscyloskopach) potrzebujemy około 10-krotnie większego Sample Rate'a niż częstotliwość sygnału. Innymi słowy, dla sygnału 100MHz potrzebujemy około 1GSPS, aby był wyraźnie widoczny na ekranie urządzenia i nie był nadmiernie przekłamany – przykładowo na jeden okres sinusoidy 100MHz powyższy przetwornik dokona maksymalnie 10 pomiarów, co może spowodować znaczne zniekształcenie sygnału. Staramy się wybierać przetworniki o jak najwyższych parametrach zachowując jednocześnie umiar kosztowy, chyba że budujemy urządzenie do pracy z wysokimi częstotliwościami, jednakowoż wtedy często potrzebny jest sprzęt specjalistyczny – FPGA czy dedykowane przetworniki różnicowe. Dobrym wyborem na start jest układ z przetwornikiem 12-bitowym z szybkością 1MSPS, który spełnia większość potrzeb w projektach hobbystycznych, aczkolwiek w wielu przypadkach 10bit z szybkością liczoną w SPS lub kSPS też wystarczy (np. do odczytywania wartości potencjometru). Inne istotne cechy Jak już zauważyłeś ten artykuł opisuje wyłącznie najbardziej podstawowe parametry wpływające na wybór mikrokontrolera. W rzeczywistości należy brać pod uwagę również te bardziej złożone – np. w przypadku architektury ARM uwzględnić rodzaj rdzenia – np. rdzeń M3 nie posiada wbudowanej sprzętowej akceleracji obliczeń na liczbach zmiennoprzecinkowych (FPU), co już występuje w przypadku rdzenia M4. Tak samo rdzenie o niższej numeracji posiadają np. wolniejsze zestawy instrukcji względem tych o numeracji wyższej. W wielu przypadkach taktowanie mikrokontrolera nie ma znaczenia, aczkolwiek w przypadku systemów, które działają „w czasie rzeczywistym” należy brać pod uwagę czas reakcji takiego mikrokontrolera na określone zdarzenie, który definiowany jest przez ilość cykli od wystąpienia zdarzenia do reakcji oraz właśnie wspomniane taktowanie rdzenia – jeżeli ilość cykli będzie identyczna to mikrokontroler o wyższym taktowaniu szybciej je przetworzy. Oprócz tego są też inne parametry: temperatura pracy, standard wykonania (automotive – przeznaczony dla branży samochodowej, mil-spec – standard wojskowy, industrial – standard przemysłowy), pobór prądu, dostępność stanów uśpienia, to czy mikrokontroler posiada wbudowany moduł RF czy nawet niezbędne komponenty pasywne lub interfejs debuggera (JTAG, SWD, SWIO, ISP...). Dobór mikrokontrolera nie jest wbrew pozorom taki łatwy, a jest to jeden z najbardziej istotnych komponentów, które wpływają na pracę całego urządzenia, więc warto poświęcić na niego dość dużo czasu. Appendix Jeżeli masz problem z doborem mikrokontrolera do projektu przedstaw schemat poglądowy (lub opis) założeń w osobnym wątku, a bardziej doświadczeni użytkownicy forum chętnie podzielą się swoimi opiniami i propozycjami.



-
Słowem wstępu Niniejszy poradnik jest przeznaczony dla osób, które nie miały dotąd styczności z programowaniem aplikacji wizualno-obiektowych przy użyciu języka C# oraz platformy .NET (czytane jako dotnet). Skupimy się tu na podstawach języka oraz na tym, jak krok po kroku napisać wybrane aplikacje. Na początek trochę teorii Język C# jest odpowiedzą firmy Microsoft na obiektowy język Java. Struktura obu języków jest podobna, a więc osoba programująca do tej pory w Javie szybko będzie mogła stosować w C# znane już sobie mechanizmy. Platforma .NET pozwala na pisanie programów nie tylko w C#, ale także w F#, C++, Visual Basic'u, Pythonie, HTML-u, Javascript’cie czy Node.js - .NET zakłada, że wszystkie języki programowania są równe, jednak to, że Microsoft stworzył język C# oraz platformę .NET sprawiło, że programowanie w tym środowisku przy użyciu języka C# jest najbardziej wydajne. C# oraz platforma .NET pozwala także na pisanie aplikacji sieciowych, jednak ten temat nie zostanie tutaj poruszony. Ten artykuł bierze udział w naszym konkursie! Na zwycięzców czekają karty podarunkowe Allegro, m.in.: 2000 zł, 1000 zł i 500 zł. Potrafisz napisać podobny poradnik? Opublikuj go na forum i zgłoś się do konkursu! Czekamy na ciekawe teksty związane z elektroniką i programowaniem. Sprawdź szczegóły » Podstawowa wiedza Zakładam, że część osób czytająca ten poradnik miała już w swoim życiu styczność z jakimś językiem programowania wysokiego poziomu, mimo to zachęcam do zapoznania się z tą częścią poradnika, a także wracania do niej w razie potrzeb. Informacje na temat środowiska oraz zapoznania się z nim będą w oddzielnej części, przeznaczonej tworzeniu aplikacji wizualno-obiektowej. Osobom, które nie wiedzą jednak czym jest język wysokiego poziomu spróbuję wyjaśnić za pomocą skrótu myślowego i odpowiedniego rysunku: W dużym skrócie: istnieją języki wysokiego i niskiego poziomu. Język wysokiego poziomu to ten zrozumiały dla człowieka, mający postać zmiennych, ich nazw, pętli, instrukcji warunkowych itd. Natomiast język niskiego poziomu to ten najbliższy komputerowi, mający postać zer i jedynek, operacji na pamięci itd. Dawno temu ludzie programowali maszyny za pomocą kart perforowanych z wyciętymi dziurami. Było to swoistym językiem niskiego poziomu, dochodziło do błędów i było nieprzystępne dla ludzi. To właśnie było powodem powstania języków wysokiego poziomu oraz kompilatorów/interpreterów tłumaczących je na kod maszynowy. Język C# pozwala nam pracować z poniższymi typami danych byte – przyjmuje wartości od 0 do 255 char – znaki w Unicode bool – prawda / fałsz sbyte – wartości od -128 do 127 short – wartości od -32,765 do 32,767 ushort – wartości od 0 65,535 int – wartości od -2,147,483,648 do 2,147,483,647 uint – wartości od 0 do 4,294,967,295 long – wartości od 18,446,744,073,709,551,615 ulong – wartości od 0 do 18,446,744,073,709,551,615 float – wartości od -3.402823e38 do 3.402823e38 double – wartości od -1.79769313486232e308 do 1.79769313486232e308 decimal – wartości +/- od 1.0 x 10e-28 do 7.9 x 10e28 string – sekwencja znaków Unicode DateTime – format daty i czasu (0:00:00am 1/1/01 do 11:59:59pm 12/31/9999) Oprócz tych typów danych są także typy skalarne enum oraz struct, jednak ich temat nie będzie teraz rozwijany. W wymienionych powyżej typach danych, niektóre posiadają przedrostek u- i oznacza on, że typ jest unsigned czyli nieprzypisany. To z kolei oznacza, że wartości ujemne zostały przeniesione na plus w celu zwiększenia pojemności typu. Środowisko programistyczne W tej części zajmiemy się pobieraniem środowiska oraz jego wstępną konfiguracją. Pobieranie środowiska Środowisko, w którym będziemy programować to Visual Studio Community 2019 i można je pobrać na stronie https://visualstudio.microsoft.com/pl/vs/community/, to środowisko jest darmowe. Wejdź pod podany przed chwilą adres, pobierz instalator i uruchom go na swoim komputerze. Instalacja środowiska jest prosta, więc poruszymy tylko niektóre aspekty z nią związane. Ekran instalatora Visual Studio Installer W tym poradniku potrzebne będzie nam pobranie dodatku Programowanie aplikacji klasycznych dla platformy .NET, znajduje się on w części Komputery i urządzenia przenośne. Instalator powinien sam zaznaczyć wymagane pakiety opcjonalne, jednak dla pewności sprawdź, czy w prawym okienku Szczegóły instalacji są zaznaczone opcje jak na powyższym zdjęciu. W przyszłości oczywiście możesz doinstalować kolejne pakiety przy użyciu programu, który instaluje się razem z Visual Studio (jest to Visual Studio Installer), jednak teraz potrzebne nam będą tylko te domyślnie zaznaczone. Po zaznaczeniu wciskamy przycisk Instaluj znajdujący się w prawym dolnym rogu. Po instalacji może być wymagane zalogowania się do konta Microsoft. Tworzenie projektu Po uruchomieniu Środowiska wybieramy opcję Utwórz nowy projekt. Ekran użytkownika po uruchomieniu środowiska Najpierw skupimy się na aplikacji konsolowej. Znajdź szablon "Aplikacja Konsolowa", upewnij się że wybrana opcja ma tag C# Nadajmy projektowi nazwę np. Hello World. W informacjach dodatkowych na razie nic nie zmieniamy. Wybieramy Utwórz i naszym oczom powinno pokazać się środowisko, w którym będziemy pracować. Domyślnie wygenerowana aplikacja konsolowa będzie miała już napisany kod programu Hello World, skupimy się więc na jego analizie oraz dodatkowych informacjach, które mogą się przydać. using System; namespace Hello_World { class Program { static void Main(string[] args) { Console.WriteLine("Hello World!"); } } } Na początek zaczniemy od funkcji Main. Znajdująca się w niej metoda WriteLine może odstraszać początkującego programistę, jednak spokojnie. Pracujemy z aplikacją konsolową, a co za tym idzie, jeśli chcemy wypisać coś w konsoli, musimy odwołać się do metody wypisz linie (WriteLine). Metoda ta należy do klasy konsola (Console). Metody oraz klasy można zrozumieć skrótem myślowym, w tym wypadku będzie to Konsola wypisz linie „Hello World!” class Program (klasa Program) jest klasą wygenerowaną, więc możemy napisać dla niej metodę, do której później będziemy mogli się odwołać, podobnie jak przy użyciu Console.WriteLine(); namespace Hello_World może wyglądać znajomo osobom, które pisały już w C++, gdzie dla ułatwienia stosowały using namespace std; w C# namespace deklaruje zakres (proste wytłumaczenie, czym jest zakres znajdzie się na końcu poradnika) jednak ten temat rozwiniemy za chwilę przy użyciu przykładu. W celu zademonstrowania i ułatwienia zrozumienia wiedzy zdobytej do tej pory, napisałem poniższy kod: using System; namespace Hello_World { class Klasa_HelloWorld { public static void Hello() { Console.WriteLine("Hello World!"); } } } namespace wypisywanie { class Klasa_Wypisywanie { static void Main(string[] args) { Hello_World.Klasa_HelloWorld.Hello(); } } } Aby uruchomić program klikamy przycisk oznaczony zielonym trójkątem Działanie kodu wygląda następująco: Wyjaśnię więc, co dzieje się po uruchomieniu programu. Funkcja Main znajdująca się w klasie Wypisywanie z namespace wypisywanie ma w sobie odwołanie do Metody Hello() klasy o nazwie Klasa_HelloWorld zakresu Hello_World. Sama klasa metoda jest publiczna (public static void). Z kolei metoda Hello() nie należy to klasy, w której jest wywoływana, jednak modyfikator dostępu public pozwala na jej wykorzystanie. Instrukcje wejścia/wyjścia Zanim przejdziemy dalej, trzeba wspomnieć o tym jak wyglądają instrukcje wejścia/wyjścia w C#. namespace wypisywanie { class Wypisywanie { static void Main(string[] args) { String input = Console.ReadLine(); Console.WriteLine(input); } } } Dwa podstawowe polecenia wejścia i wyjścia to Console.ReadLine() oraz znane nam już Console.WriteLine(), w tym wypadku utworzyłem zmienną input, która jest ciągiem znaków (String) i przekazałem programowi, że zawiera w sobie to, co użytkownik wpisze w konsoli. Wykonywanie działań w języku C# Jak pewnie się domyślasz, w języku C# można wykonywać działania arytmetyczne, operatory arytmetyczne. Wyniki ich działań pokazuje poniższy kod. namespace wypisywanie { class Wypisywanie { static void Main(string[] args) { double a = 10; double b = 4; Console.WriteLine(a + b); //dodawanie wynikiem będzie 14 Console.WriteLine(a - b); //odejmowanie wynikiem będzie 6 Console.WriteLine(a * b); //mnożenie wynikiem będzie 40 Console.WriteLine(a / b); //dzielenie wynikiem będzie 2,5 Console.WriteLine(a % b); //reszta z dzielenie wynikiem będzie 2 } } } Dla ułatwienia przekazu posłużyłem się zdefiniowanymi wartościami a oraz b, by w komentarzu (czym jest komentarz, wyjaśnię na końcu poradnika) pokazać przykładowe wyniki działań. W swoim kodzie możesz oczywiście wpisywać te zmienne przy użyciu polecenia Console.ReadLine(). Instrukcje warunkowe Pierwszą instrukcją warunkową, której działaniu się przyjrzymy jest if. Instrukcja warunkowa if przyjmuje jeden argument i wykonuje odpowiedni kod, jeśli argument jest spełniony. Warto także wspomnieć o słowie kluczowym else, które wykonuje inny kod, jeśli warunek nie został spełniony. Z połączenia obu tych poleceń wychodzi else if, który pozwala na doprecyzowanie kolejnego warunku. namespace wypisywanie { class Wypisywanie { static void Main(string[] args) { String input = Console.ReadLine(); if(input == "hello") { Console.WriteLine("Hello World!"); } else if (input == "poradnik") { Console.WriteLine("Witamy w poradniku programowania w C#"); } else { Console.WriteLine("podano błędną wartość"); } } } } Powyższy kod sprawdza, czy użytkownik wpisał w konsoli słowo hello lub poradnik, i wykonuje odpowiednie polecenia. Jeśli zaś użytkownik wpisał coś innego, kod wyświetli komunikat o podaniu błędnej wartości. Drugą instrukcją warunkową, którą poznamy jest switch. Słowa kluczowe switch oraz case działają na podobnej (lecz nie identycznej) zasadzie co if i else. Różnica polega na wygodzie pisania oraz czasie wykonywania instrukcji (nie będzie tu poruszana szczegółowa analiza różnic w działaniu obu instrukcji). namespace Hello_World { class Program { static void Main(string[] args) { String input = Console.WriteLine(); switch (input) { case "hello": Console.WriteLine("Hello World!"); break; case "poradnik": Console.WriteLine("Poradnik programowania w C#"); break; default: Console.WriteLine("podano błędną wartość"); break; } } } } Powyższy kod działa identycznie jak ten z wykorzystaniem if oraz else. Słowo kluczowe break przerywa działanie funkcji oraz pętli. Pętle w języku C# Teraz spróbujmy wypisać w konsoli napis „Hello World!” 10 razy, można oczywiście w tym celu skopiować fragment kodu odpowiedzialny za to 10 razy. Jednak co w wypadku, gdy stwierdzimy, że 10 razy to za mało? Wtedy kopiowanie kodu nie ma sensu. Do uproszczenia tego procesu posłużą nam pętle. Osobom, które są już zapoznane z pętlami, ten fragment nie wniesie nic nowego, można więc go pominąć. Osobom, które chcą sobie powtórzyć lub nie wiedzą nic o pętlach warto powiedzieć że istnieją cztery różne pętle: for foreach while do while Pętla for namespace wypisywanie { class Wypisywanie { static void Main(string[] args) { for(int i = 0; i<10; i++) { Console.WriteLine( i + " Hello World!"); } } } } Pętla for przyjmuję trzy argumenty, na obrazku są to kolejno: int i = 0 - ten argument wykonuje się tylko raz na początku wykonywania pętli; jest to zmienna, z którą pętla rozpoczyna swoje działanie; i<10 - to warunek pętli, w tym wypadku pętla będzie się wykonywała tak długo, aż wartość zdefiniowanej przed chwilą zmiennej będzie mniejsza od 10; i++ - to inkrementacja zmiennej czyli podniesienie jej wartości o 1 z każdym wykonaniem pętli. Pętla foreach namespace wypisywanie { class Wypisywanie { static void Main(string[] args) { int[] tablica = { 1, 2, 3, 4, 5, 6, 7, 8, 9, 10}; foreach(int i in tablica) { Console.WriteLine( i + " Hello World!"); } } } } Pętla foreach wykonuje się dla każdego elementu tablicy. W tym wypadku zdefiniowałem tablicę liczb całkowitych int[], jako tablicę zawierającą 10 elementów. Pętla foreach przyjmuje dwa argumenty w tym wypadku int i inny, będący dowolnym elementem tablicy oraz in tablica, będący wskazaniem tablicy. While i do while namespace wypisywanie { class Wypisywanie { static void Main(string[] args) { int i = 0; while (i < 10) { Console.Write(i + " Hello World!"); i++; } } } } Pętla while przyjmuje jeden warunek i będzie się wykonywać do momentu, kiedy warunek zostanie spełniony. namespace wypisywanie { class Wypisywanie { static void Main(string[] args) { int i = 0; do { Console.Write(i + " Hello World!"); i++; }while (i < 10); } } } Pętla do while jest podobna do pętlu while, z tym że wykona się przynajmniej raz, niezależnie od prawdziwości warunku. namespace wypisywanie { class Wypisywanie { static void Main(string[] args) { int i = 11; do { Console.Write(i + " Hello World!"); i++; }while (i < 10); } } Na powyższym obrazku widać, że do while wykonało się raz, mimo iż warunek nie jest spełniony. Ćwiczenie Przy użyciu zdobytej wiedzy spróbuj napisać prosty kalkulator obsługujący działania na dwóch liczbach. Wskazówka do Ćwiczenia W razie problemów z pisaniem postaraj się wyobrazić sobie albo narysować schemat działania twojego programu. Czy ma najpierw wypisać komunikat i oczekiwać na wybranie danego działania? Ma poprosić o podanie liczb na których ma operować, czy w inny sposób ma poprowadzić użytkownika do wykonania działania? Pierwsza aplikacja wizualno-obiektowa W tej części poradnika zajmiemy się pisaniem twojej pierwszej aplikacji z interfejsem użytkownika. Na początku skoncentrujemy się na potrzebnych nam elementach środowiska i podstawowych kontrolkach, które będziemy wykorzystywać, potem zajmiemy się pisaniem prostego kalkulatora. Tworzenie nowego projektu W tej części poradnika dalej będziemy pracować ze środowiskiem Visual Studio Community. W poprzedniej części zainstalowaliśmy wszystkie potrzebne nam elementy tego środowiska, które będą nam potrzebne podczas tworzenia projektu. Po uruchomieniu Visual Studio wybieramy opcję „Utwórz nowy projekt”. Następnie z listy wybieramy „Aplikacja Windows Forms”, jeśli masz problem ze znalezieniem odpowiedniej opcji, możesz wpisać ją w wyszukiwarce szablonów. Klikamy „Dalej” i nadajemy naszemu projektowi odpowiednią nazwę. Po nadaniu nazwy i kliknięciu „Dalej” pojawi się okienko proszące nas o wybranie wersji .NET, z którą chcemy pracować. W tym poradniku pracujemy z .NET Core 3.1. Po upewnieniu się, że wybraliśmy odpowiednią opcję, klikamy „Utwórz”. Po utworzeniu projektu pokaże nam się takie okno. Znajduje się na nim puste okienko aplikacji, którą teraz tworzymy. Możemy uruchomić projekt w taki sam sposób jak robiliśmy to z aplikacją konsolową. Klikamy nazwę naszego projektu, która jest obok zielonej strzałki i po chwili pojawi nam się takie same okienko jak w środowisku. Możemy to okienko zamknąć w taki sam sposób jak inne aplikacje komputerowe - krzyżykiem znajdującym się w prawym górnym rogu. Jednak lepiej zamykać projekt z poziomu środowiska, ponieważ przy bardziej rozbudowanych projektach zamknięcie okienka nie musi oznaczać końca działania aplikacji. Znajdź czerwony kwadrat w w górnej części środowiska, będzie w tym samym miejscu, co przycisk odpowiedzialny za uruchomienie aplikacji. Czerwony kwadrat zatrzyma działanie aplikacji, opcję po lewej i prawej stronie czerwonego kwadratu odpowiadają kolejno za wstrzymanie działania programu oraz za ponowne uruchomienie. Potrzebne informacje o środowisku Teraz skupimy się na elementach środowiska, których będziemy potrzebować. Po lewej stronie będzie zwinięty pasek o nazwie Przybornik. Na górze listy Przybornika znajduje się wyszukiwarka, pozwala w szybki sposób znaleźć potrzebne nam elementy interfejsu. Skupimy się teraz na kontrolce „Button” oraz „TextBox”. Na powyższych zdjęciach znajdują się potrzebne nam kontrolki znalezione przy użyciu wyszukiwarki. Po znalezieniu odpowiednich kontrolek przeciągamy je na obszar roboczy. W związku z tym, że w poradniku zajmujemy się pisaniem aplikacji „Kalkulator”, potrzebne nam będzie 16 przycisków (10 numerycznych i 6 funkcyjnych) oraz jeden TextBox do wyświetlania wyniku. Dla ułatwienia sobie pracy, po przeciągnięciu pierwszego przycisku ustaw jego wymiary na takie, które chcesz mieć w projekcie końcowym. Późniejsza zmiana rozmiarów wielu elementów może być czasochłonna i nieprzyjemna. Aby zmienić rozmiar przycisku kliknij go i rozciągnij używając charakterystycznych punktów, które się pojawią. Gdy już nadasz kontrolce odpowiednie wymiary, możesz ją skopiować skrótem klawiszowym ctrl + c i wkleić kolejne przyciski o tych samych wymiarach. Wymiary kontrolki TextBox zmienia się w identyczny sposób, jednak jeśli chcesz ustawić jej wysokość, musisz wybrać opcję MultiLine klikając kolejno trójkącik nad wybranym TextBox’em, a następnie opcję MultiLine. Po dodaniu wszystkich potrzebnych kontrolek, moja propozycja wyglądu aplikacji prezentuje się następująco: Po napisaniu kodu aplikacja byłaby funkcjonalna, jednak jej wygląd oraz podpisy nie są przyjazne użytkownikowi, dlatego aby to zmienić, możemy dostosować wszystkie elementy interfejsu. Po wybraniu dowolnego elementu w prawym dolnym rogu środowiska pojawią nam się właściwości, które dla tego elementu możemy zmienić. Zachęcam do samodzielnego zapoznania się ze wszystkimi elementami, dlatego teraz skupmy się tylko na podstawowych, które będą nam potrzebne. Na początek zmienimy nazwę przycisku oraz tekst, jaki jest w nim wyświetlany. By zmienić nazwę w segmencie Design zmienimy właściwość (Name) na liczba_7 oraz w segmencie Wygląd właściwość text na 7. Możemy tez dostosować wygląd, zmieniając właściwości z segmentu Widok, takie jak BackColor (kolor tła), BorderSize z listy FlatApperance (grubość ramki wokół przycisku) oraz FlatStyle (ogólny wygląd przycisku. Zachęcam do samodzielnej zabawy tymi ustawieniami i zobaczenia jak wpływają na wygląd kontrolki. W ten sam sposób możesz również zmienić ustawienia okienka klikając na nie i zmieniając np. kolor tła albo rodzaj ramki. Teraz zmienimy ustawienia TextBox’a. Zmień właściwość Text na przykładowy ciąg liczb, TextAlign na Right oraz rozmiar czcionki właściwością Font, dostosuj czcionkę do rozmiaru kontrolki (pamiętaj, żeby usunąć wybrany przez siebie ciąg liczb po dobraniu satysfakcjonujących ustawień czcionki) . Zaproponowany przeze mnie wygląd aplikacji jest teraz taki: Teraz dodajmy naszemu kalkulatorowi kod, by zapewnić mu pewną funkcjonalność. Po podwójnym kliknięciu na kontrolkę, środowisko wygeneruje nam fragment kodu odpowiedzialny za wykonanie poleceń mających miejsce po kliknięciu przycisku w programie. Kliknij dwukrotnie na wszystkie przyciski. using System; using System.Collections.Generic; using System.ComponentModel; using System.Data; using System.Drawing; using System.Linq; using System.Text; using System.Threading.Tasks; using System.Windows.Forms; namespace WinFormsApp1 { public partial class Form1 : Form { public Form1() { InitializeComponent(); } private void liczba_1_Click(object sender, EventArgs e) { } } } Na powyższym obrazku widać wygenerowany kod. Zauważ, że funkcja void przyjmuje nazwy takie jak nazwy kontrolek, które przed chwilą stworzyłeś. W programie potrzebne będą nam trzy zmienne globalne: jedna przechowująca znak działania, jedna przechowująca wynik i jedna zmienna kontrolna. Double wynik = 0; //wynik działania String operacja = ""; //zmienna przechowująca znak działania bool czyPrzeprowadzaOperacje = false; //zmienna kontrolna do sprawdzania czy można przeprowadzić operacje Żeby móc wykonywać działania, potrzebne będą nam liczby. W tym celu dla każdej kontrolki w kodzie musimy przypisać wartość liczbową. private void liczba_7_Click(object sender, EventArgs e) { czyPrzeprowadzaOperacje = false; Button przycisk = (Button)sender; textBox1.Text = textBox1.Text + przycisk.Text; } Powyższy kod zadziała dla każdej kontrolki, można by go użyć nawet bez wklejania do każdej funkcji _Click, jednak dla ułatwienia skupimy się na prostszej wersji. Zanim wkleisz kod do wszystkich funkcji, wyjaśnię ci, w jaki sposób on działa. Na samym początku zmienna czyPrzeprowadzaOperacje jest ustawiona na fałsz. Użyjemy tej zmiennej, żeby upewnić się, że kod będzie działał dokładnie tak jak tego chcemy. Kolejna linijka “Button button = (Button)sender” na niewtajemniczonych robi wrażenie, jednak jest to bardzo proste. Ta linijka tworzy nowy obiekt typu Button o nazwie przycisk, zaś (Button)sender w uproszczeniu tworzy nadawcę. Cała funkcja należy do przycisku 7, który jest nadawcą, więc ta linijka sprawia, że nasz przycisk może „odebrać” informacje sam od siebie. Ostatnia linijka jest łatwa do zrozumienia. Chcemy przypisać tekst dla pola tekstowego i, aby to zrobić, wywołujemy Text z textBox1, a następnie przypisujemy mu tekst zawarty w przycisku (w tym wypadku jest to 7). Teraz możesz skopiować ten kod dla innych liczb. Nie martw się, nic złego się nie stanie . Jak już skopiujesz ten kod w odpowiednie miejsca, uruchom program i upewnij się, że wszystkie liczby wyświetlają się poprawnie. Następnie potrzebny nam będzie kod sprawdzający, jaka operacja została wybrana. private void dzielenie_Click(object sender, EventArgs e) { Button button = (Button)sender; if (wynik != 0) { rownosc.PerformClick(); operacja = button.Text; czyPrzeprowadzaOperacje = true; } else { operacja = button.Text; wynik = Double.Parse(textBox1.Text); textBox1.Text = " "; czyPrzeprowadzaOperacje = true; } } Pozwoli na to powyższy kod. Podobnie jak poprzednio, ten sam kod możesz zastosować dla każdego przycisku osobno. Zanim jednak go powklejasz tam gdzie trzeba - trochę wyjaśnień. Zajmę się rzeczami, które wykorzystujemy po raz pierwszy. Linijka rownosc.PerformClick() ta linijka odwołuje się do kontrolni o nazwie rownosc, a PerformClick() to metoda, która wykona kod w przycisku równości bez jego kliknięcia. Stanie się tak, tylko jeśli wynik będzie różny od zera. Linijka wynik = Double.Parse(textBox1.Text) przypisze zmiennej wynik wartość z textbox1 nie możemy tego jednak zrobić bezpośrednio, w tym celu użyjemy metody Parse by zmienić string zawierający ciąg liczbowy na typ Double. Niezależnie od spełnienia instrukcji warunkowej if, zmieniamy zmienną czyPrzeprowadzaOperację naprawdę. Teraz potrzebna nam funkcja, która wykonuje obliczenia. private void rownosc_Click(object sender, EventArgs e) { switch (operacja) { case "+": textBox1.Text = (wynik + Double.Parse(textBox1.Text)).ToString(); break; case "-": textBox1.Text = (wynik - Double.Parse(textBox1.Text)).ToString(); break; case "*": textBox1.Text = (wynik * Double.Parse(textBox1.Text)).ToString(); break; case "/": textBox1.Text = (wynik / Double.Parse(textBox1.Text)).ToString(); break; default: break; } wynik = Double.Parse(textBox1.Text); } Powyższy kod wykorzystuje instrukcję switch case w celu sprawdzenia jaką operację chcemy wykonać. Jeśli spełnimy jeden z warunków, wtedy wykona się odpowiednie działanie. Skupimy się teraz na tym, co nowe. W każdej instrukcji case możesz zauważyć metodę ToString(), w tym wypadku używamy jej, żeby wyświetlić wynik obliczeń w textBox’ie. Zauważ, że wykonujemy obliczenia na typach liczbowych, których nie możemy bezpośrednio wyświetlić, właśnie dlatego używamy metody ToString(). Na koniec zostało nam tylko zajęcie się przyciskiem CE. Dla zapewnienia jego funkcjonalności wykorzystamy poniższy kod. private void CE_Click(object sender, EventArgs e) { textBox1.Text = " "; wynik = 0; } Dodatkowe objaśnienia pojęć, które wystąpiły w poradniku Zakres – dla ułatwienia przekazu posłużymy się przykładem static void Main(string[] args) { //to jest zmienna x z tego zakresu int x = 3; } void InnaFunkcja() { //to jest zmienna x z tego zakresu String x = "Hello"; } W powyższym fragmencie kodu znajdują się dwie funkcje, każda z tych funkcji jest ograniczona przez „agrafki” (otwarcia „{„ oraz zamknięcia „}”) te agrafki są zakresem tej funkcji, co sprawia, że wszystko co się w nim znajduje, jest widziane tylko w tym zakresie i nie jest dostępne poza nim. Komentarz – w języki C# możemy „zakomentować” fragmenty kodu, oznacza to, że kompilator nie będzie brał tego fragmentu pod uwagę przy kompilowaniu naszego kodu. Istnieją dwa rodzaje komentarza: jednoliniowy oraz wieloliniowy, pokazane na poniższym obrazku: static void Main(string[] args) { //to jest komentarz jednoliniowy /** to jest komentarz wieloliniowy */ } Praca domowa Chciałbym, abyś po ukończeniu tego poradnika samodzielnie zapoznał się z właściwościami kontrolek i zmieniał ich wygląd. Postaraj się także dodać dodatkową funkcjonalność w postaci obsługi liczb dziesiętnych, potęg oraz pierwiastków. Powodzenia .


























- 3 odpowiedzi
-
- 4
-
-
- programowanie
- C#
- (i 3 więcej)
-
Cześć, jesteśmy grupą studentów, którzy na swój projekt inżynierski postanowili stworzyć niedużego robota sterowanego za pomocą interaktywnej maty. Robot sterowany jest za pomocą sekwencji, które wprowadzamy na wyżej wymienionej macie. Możemy dawać mu proste komendy pozwalające na poruszanie się. Alternatywnym trybem jest jazda swobodna pozwalająca na sterowanie robotem w czasie rzeczywistym. Mata jest urządzeniem posiadającym układ przycisków 4x4 i ekran pokazujący aktualnie wpisywaną sekwencję. Posiadając podstawową wiedzę na temat programowania i elektroniki, będziesz mógł skonstruować taki zestaw sam, w zaciszu swojego domu. Bardziej szczegółowe informacje na temat samego projektu znajdziesz w samym poradniku. Repozytorium jest podzielone na pięć folderów. Dzielą się one na: Kod robota - znajduje się tu gotowy kod, dzięki któremu robot będzie w stanie się poruszać. Kod maty - znajduje się tu gotowy kod, dzięki któremu będziemy w stanie wysyłać komendy z maty do robota. Schemat robota - wymagane pliki do zamówienia płytki pcb do robota. Schemat maty - wymagane pliki do zamówienia płytki pcb do robota. Instruktaż - szczegółowy poradnik zawierający wymagane materiały oraz opis budowy robota i maty. Zalecamy z zapoznaniem się dokładnie z poradnikiem przed próbą konstrukcji. Spis treści znajdziesz w pliku README w folderze "Instruktaż". Powodzenia! Chcielibyśmy tutaj jeszcze dodać, że wykonując projekt trzeba liczyć się z pewnymi wydatkami. Orientacyjne koszty na dzień 16 stycznia 2020: Robot - koszt wszystkich części robota to około 130zł, jeśli kupujemy na botlandzie. Można zmniejszyć koszta kupując części na przykład na aliexpress, jednak wydłuży to czas w jakim części do nas przyjdą. Mata - koszt wszystkich części maty wynosi około 205zł, podobna sytuacja jak z częściami u robota, koszty można zmniejszyć kupując części na przykład z allegro lub aliexpress. Zdjęcia końcowe produktów: Robot Mata Więcej informacji na temat projektu oraz poradnik ze wszystkimi potrzebnymi plikami znajdują się w repozytorium PS. Schemat do robota zostanie jeszcze zaktualizowany w ciągu kilku najbliższych dni, ponieważ wykryliśmy błąd. Mogą również nastąpić mniejsze zmiany w samych opisach.