Przeszukaj forum
Pokazywanie wyników dla tagów 'Zasilanie'.
Znaleziono 47 wyników
-
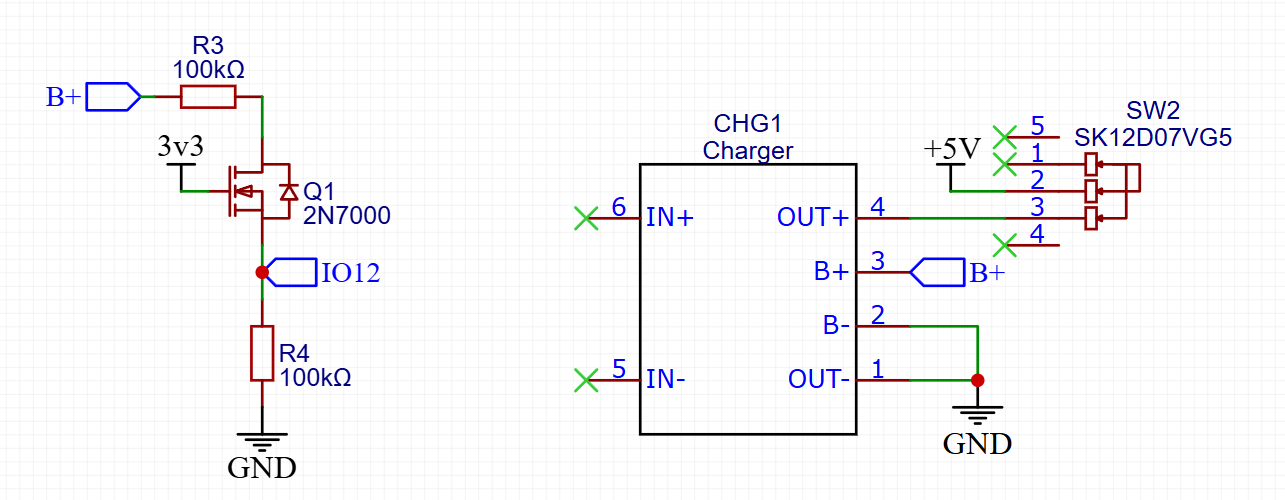
 Cześć! Mam pytanie związane z pomiarem napięcia baterii Li-Pol 3,7V przez ADC w ESP32, konkretnie pin IO12.Chciałbym, aby bateria była odłączany pinu IO12, kiedy ESP32 jest wyłączone (nie ma 3.3V). Robię to dlatego, ponieważ gdy ESP32 jest wyłączone to jak będzie widniało zasilanie na pinie IO12 to może nastąpić prądowy „backfeed", chyba że się mylę, co może uszkodzić esp32. Bateria jest podpięta do układu TP4056. Obecnie testuję układ z dzielnikiem 2×100k (B+ → 100k → IO12 → 100k → GND) oraz próbowałem użyć MOSFET-a 2N7000, żeby rozłączać napięcie z baterii, ale nie jestem pewien czy dobrze to robię. Pytanie: Jak najlepiej wstawić tranzystor (np. N-MOSFET THT, 2N7000), żeby: Gdy ESP32 ma 3.3V – pomiar napięcia baterii przez IO12 działa normalnie. Gdy ESP32 jest wyłączone – napięcie z baterii NIE trafia na IO12 (żeby nie zakłócać pomiaru, nie ciągnąć prądu przez dzielnik, itd.). Mój aktualny pomysł to: Czy to ma sens? A może da się to zrobić lepiej? Zależy mi na prostym i pewnym rozwiązaniu – może być z dodatkowymi elementami (pull-down, pull-up itp.). Z góry dziękuję za pomoc!
Cześć! Mam pytanie związane z pomiarem napięcia baterii Li-Pol 3,7V przez ADC w ESP32, konkretnie pin IO12.Chciałbym, aby bateria była odłączany pinu IO12, kiedy ESP32 jest wyłączone (nie ma 3.3V). Robię to dlatego, ponieważ gdy ESP32 jest wyłączone to jak będzie widniało zasilanie na pinie IO12 to może nastąpić prądowy „backfeed", chyba że się mylę, co może uszkodzić esp32. Bateria jest podpięta do układu TP4056. Obecnie testuję układ z dzielnikiem 2×100k (B+ → 100k → IO12 → 100k → GND) oraz próbowałem użyć MOSFET-a 2N7000, żeby rozłączać napięcie z baterii, ale nie jestem pewien czy dobrze to robię. Pytanie: Jak najlepiej wstawić tranzystor (np. N-MOSFET THT, 2N7000), żeby: Gdy ESP32 ma 3.3V – pomiar napięcia baterii przez IO12 działa normalnie. Gdy ESP32 jest wyłączone – napięcie z baterii NIE trafia na IO12 (żeby nie zakłócać pomiaru, nie ciągnąć prądu przez dzielnik, itd.). Mój aktualny pomysł to: Czy to ma sens? A może da się to zrobić lepiej? Zależy mi na prostym i pewnym rozwiązaniu – może być z dodatkowymi elementami (pull-down, pull-up itp.). Z góry dziękuję za pomoc!
-
 Dzień dobry, potrzebuję porady odnośnie doboru zasilania. Układ, który zamierzam poskładać na płytce uniwersalnej potrzebuje napięcia 5V oraz prądu co najmniej 6A. Zależy mi, żeby układ był przenośny (ale jeśli nie będzie się dało to się nie będę przy tym upierać ). Jakie zasilanie do takiego układu możecie polecić: jakiś akumulator, zasilacz, czy w ogóle coś innego? I jak dane zasilanie mogę przylutować do płytki uniwersalnej? Czy przylutować jakieś wtyki lub gniazda do płytki i podłączać do nich przewody od zasilania? Czy proponujecie coś innego, mądrzejszego? Czego będę potrzebować? Mile widziane są linki do proponowanych elementów, abym wiedziała czego szukać. Proszę nie bić, jeśli to głupie pytania, ale potrzebuję zasięgnąć porady od kogoś bardziej doświadczonego ode mnie
Dzień dobry, potrzebuję porady odnośnie doboru zasilania. Układ, który zamierzam poskładać na płytce uniwersalnej potrzebuje napięcia 5V oraz prądu co najmniej 6A. Zależy mi, żeby układ był przenośny (ale jeśli nie będzie się dało to się nie będę przy tym upierać ). Jakie zasilanie do takiego układu możecie polecić: jakiś akumulator, zasilacz, czy w ogóle coś innego? I jak dane zasilanie mogę przylutować do płytki uniwersalnej? Czy przylutować jakieś wtyki lub gniazda do płytki i podłączać do nich przewody od zasilania? Czy proponujecie coś innego, mądrzejszego? Czego będę potrzebować? Mile widziane są linki do proponowanych elementów, abym wiedziała czego szukać. Proszę nie bić, jeśli to głupie pytania, ale potrzebuję zasięgnąć porady od kogoś bardziej doświadczonego ode mnie -
Witam, Dziś zakupiłem głośnik bluetooth z wejściem zasilającym DC-5V (jak to dokładnie wygląda - przesyłam załączniki foto). Niestety gdy wkładam zasilacz do prądu, stosowny kabelek do głośnika, aby go ładować... zupełnie nic się nie dzieje. Zero reakcji na głośniku, jakby to wejście było zepsute. Czy da się to w jakiś sposób naprawić? Z góry dziękuję za rady i wszelką pomoc!




-
Witam. Przyszedł mi dzisiaj oscyloskop który kupiłem przez internet. Po włączeniu nic się nie dzieje. Właściwie to prawie nic bo na wyświetlaczu nic się nie pojawia, dioda power się nie świeci, ale zauważyłem że przy włączaniu dioda triggered bardzo delikatnie świeci i po chwili przestaje. Zacząłem kręcić pokrętłem przy włączonym oscyloskopie i odkryłem że ustawienie pokrętła na bardzo dokładną pozycje powoduje miganie diody triggered ze stałą częstotliwością i jak zakładam pełną jasnością. Próbowałem parę razy, czasem częstotliwość migania jest większa, czasem mniejsza. Ale raczej nie ma to znaczenia. Pomimo braku zasilania ono jednak jest? Nie rozumiem tego. Nie wiem jak zabrać się za naprawę tego oscyloskopu. Pani która mi go sprzedała twierdzi że na pewno działał jeszcze przed wysłaniem. Dodam że w temacie oscyloskopów jestem totalnie zielony. Mam pełne wyposażenie, oscyloskop miał jeszcze plomby. Szkoda jakby taki sprzęt się zmarnował. Byłbym wdzięczy za jakiekolwiek porady, schematy i informacje. Z góry dzięki za pomoc.
-
 Dzień dobry, nie dawno kupiłem sobie wyświetlacz LCD TFT SPI ST7735S ze slotem SD. Można ten wyświetlacz podłączyć do Arduino, ale czy jest możliwość włożenia karty SD do slotu i podłączenia pinów VCC i GND do plusa i minusa baterii? Jeśli tak to proszę podać jakie zasilanie do niego podłączyć Z góry dziękuję za odpowiedź.
Dzień dobry, nie dawno kupiłem sobie wyświetlacz LCD TFT SPI ST7735S ze slotem SD. Można ten wyświetlacz podłączyć do Arduino, ale czy jest możliwość włożenia karty SD do slotu i podłączenia pinów VCC i GND do plusa i minusa baterii? Jeśli tak to proszę podać jakie zasilanie do niego podłączyć Z góry dziękuję za odpowiedź. -
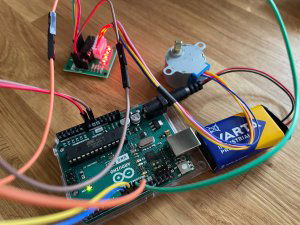
Witam, Zrobiłem sterownik do dwóch silników krokowych w oparciu o Arduino+Iduino ST1113 i 2x TB6660, wszystko działa jak należy do momentu przejścia na zasilanie arduino z przetwornicy napięcia StepDown 34>>5v. Co ciekawe całość działa poprawnie, tzn. silniki reagują na sterowanie przyciskami na LCD keypad shield ale nie wyświetlają się dane na wyświetlaczu (jest czysty i podświetlony). Gdy ten sam układ zasilę z komputera przez wejście USB w arduino znaki na wyświetlaczu są prawidłowe. Proszę o pomoc, czy do podłączenia zasilania z przetwornicy impulsowej potrzebuję jakiegoś dodatkowego modułu?
-
 Witam serdecznie, Borykam się z dziwnym dla mnie problemem, otóż zbudowałem sobie pojazd rc składający się z czterech silników, arduino, nakładki od iduino i modułu esp32 wroom do komunikacji wifi z telefonem. Do sterowania użyłem aplikacji z google play, który wysyła 5 zapytań GET; "GET /?State=F", "GET /?State=B","GET /?State=L","GET /?State=R", "GET /?State=S". Kolejno są to : przód, tył, lewo, prawo i stop. Sygnały schodzą na esp jak i są przekazywane na arduino dopóki układ jest zasilany z kabla usb. Niestety gdy uruchomię z zasilania bateryjnego, to silniki na sygnały nie reaguję, podobnie jest gdy obwód jest zasilany z kabla usb, a przełączę przycisk zasilania bateryjnego, to wywala komunikację z komputerem. Kod sterujący silnikami w zależności od otrzymanej komendy, a pod nim kod z esp32, który odbiera sygnały z telefonu i przekazuje na arduino. Wydaje mi się, że jest kwestia zasilania, ale nie dam sobie ręki uciąć, może ktoś miał podobny problem? Z góry dziękuję za odpowiedzi. #include <AFMotor.h> // Inicjalizacja motor shield AF_DCMotor motor1(1); // Motor 1 podłączony do kanału M1 AF_DCMotor motor2(2); // Motor 2 podłączony do kanału M2 AF_DCMotor motor3(3); // Motor 3 podłączony do kanału M3 AF_DCMotor motor4(4); // Motor 4 podłączony do kanału M4 void setup() { Serial.begin(9600); // Komunikacja z ESP32 Serial.println("Arduino is ready to receive commands"); } void loop() { if (Serial.available()) { char command = Serial.read(); Serial.print("Received command: "); Serial.println(command); switch (command) { case 'F': // Ruch do przodu Serial.println("Moving forward"); motor1.setSpeed(255); // Maksymalna prędkość motor1.run(FORWARD); motor2.setSpeed(255); motor2.run(FORWARD); motor3.setSpeed(255); motor3.run(FORWARD); motor4.setSpeed(255); motor4.run(FORWARD); break; case 'B': // Ruch do tyłu Serial.println("Moving backward"); motor1.setSpeed(255); motor1.run(BACKWARD); motor2.setSpeed(255); motor2.run(BACKWARD); motor3.setSpeed(255); motor3.run(BACKWARD); motor4.setSpeed(255); motor4.run(BACKWARD); break; case 'R': // Skręt w prawo Serial.println("Turning right"); motor1.setSpeed(255); motor1.run(FORWARD); motor2.setSpeed(255); motor2.run(BACKWARD); motor3.setSpeed(255); motor3.run(FORWARD); motor4.setSpeed(255); motor4.run(BACKWARD); break; case 'L': // Skręt w lewo Serial.println("Turning left"); motor1.setSpeed(255); motor1.run(BACKWARD); motor2.setSpeed(255); motor2.run(FORWARD); motor3.setSpeed(255); motor3.run(BACKWARD); motor4.setSpeed(255); motor4.run(FORWARD); break; case 'S': // Stop Serial.println("Stopping"); motor1.setSpeed(0); motor1.run(RELEASE); motor2.setSpeed(0); motor2.run(RELEASE); motor3.setSpeed(0); motor3.run(RELEASE); motor4.setSpeed(0); motor4.run(RELEASE); break; default: Serial.println("Unknown command"); break; } } } #include <WiFi.h> // Nazwa i hasło sieci Wi-Fi const char* ssid = "RC_CONNECTION"; const char* password = "12345678"; // Inicjalizacja serwera WiFiServer server(80); // Piny dla Serial1 const int RX_PIN = 16; const int TX_PIN = 17; void setup() { Serial.begin(115200); Serial1.begin(9600, SERIAL_8N1, RX_PIN, TX_PIN); // Używamy Serial1 do komunikacji z Arduino // Ustawienie ESP32 jako Access Point WiFi.softAP(ssid, password); Serial.println("Access Point utworzony:"); Serial.print("SSID: "); Serial.println(ssid); Serial.print("IP address: "); Serial.println(WiFi.softAPIP()); // Uruchomienie serwera server.begin(); } void loop() { WiFiClient client = server.available(); // Sprawdzenie, czy są klienci if (client) { Serial.println("New connection"); String currentLine = ""; // do trzymania danych z klienta while (client.connected()) { if (client.available()) { char c = client.read(); Serial.write(c); // Wysyła komendę do komputera przez Serial if (c == '\n') { // Przetwarzanie żądania GET Serial.println("Processing request:"); Serial.println(currentLine); // Wysłanie komendy do Arduino przez Serial1 if (currentLine.indexOf("GET /?State=F") >= 0) { Serial1.println("F"); } else if (currentLine.indexOf("GET /?State=B") >= 0) { Serial1.println("B"); } else if (currentLine.indexOf("GET /?State=R") >= 0) { Serial1.println("R"); } else if (currentLine.indexOf("GET /?State=L") >= 0) { Serial1.println("L"); } else if (currentLine.indexOf("GET /?State=S") >= 0) { Serial1.println("S"); } // Wysłanie odpowiedzi do klienta client.println("HTTP/1.1 200 OK"); client.println("Content-type:text/html"); client.println(); client.println("Komenda otrzymana"); client.println(); break; } else if (c != '\r') { currentLine += c; } } yield(); // Dodanie yield() w celu uniknięcia resetowania przez watchdog } client.stop(); Serial.println("Client Disconnected"); } delay(10); // Dodanie niewielkiego opóźnienia, aby odciążyć procesor }
Witam serdecznie, Borykam się z dziwnym dla mnie problemem, otóż zbudowałem sobie pojazd rc składający się z czterech silników, arduino, nakładki od iduino i modułu esp32 wroom do komunikacji wifi z telefonem. Do sterowania użyłem aplikacji z google play, który wysyła 5 zapytań GET; "GET /?State=F", "GET /?State=B","GET /?State=L","GET /?State=R", "GET /?State=S". Kolejno są to : przód, tył, lewo, prawo i stop. Sygnały schodzą na esp jak i są przekazywane na arduino dopóki układ jest zasilany z kabla usb. Niestety gdy uruchomię z zasilania bateryjnego, to silniki na sygnały nie reaguję, podobnie jest gdy obwód jest zasilany z kabla usb, a przełączę przycisk zasilania bateryjnego, to wywala komunikację z komputerem. Kod sterujący silnikami w zależności od otrzymanej komendy, a pod nim kod z esp32, który odbiera sygnały z telefonu i przekazuje na arduino. Wydaje mi się, że jest kwestia zasilania, ale nie dam sobie ręki uciąć, może ktoś miał podobny problem? Z góry dziękuję za odpowiedzi. #include <AFMotor.h> // Inicjalizacja motor shield AF_DCMotor motor1(1); // Motor 1 podłączony do kanału M1 AF_DCMotor motor2(2); // Motor 2 podłączony do kanału M2 AF_DCMotor motor3(3); // Motor 3 podłączony do kanału M3 AF_DCMotor motor4(4); // Motor 4 podłączony do kanału M4 void setup() { Serial.begin(9600); // Komunikacja z ESP32 Serial.println("Arduino is ready to receive commands"); } void loop() { if (Serial.available()) { char command = Serial.read(); Serial.print("Received command: "); Serial.println(command); switch (command) { case 'F': // Ruch do przodu Serial.println("Moving forward"); motor1.setSpeed(255); // Maksymalna prędkość motor1.run(FORWARD); motor2.setSpeed(255); motor2.run(FORWARD); motor3.setSpeed(255); motor3.run(FORWARD); motor4.setSpeed(255); motor4.run(FORWARD); break; case 'B': // Ruch do tyłu Serial.println("Moving backward"); motor1.setSpeed(255); motor1.run(BACKWARD); motor2.setSpeed(255); motor2.run(BACKWARD); motor3.setSpeed(255); motor3.run(BACKWARD); motor4.setSpeed(255); motor4.run(BACKWARD); break; case 'R': // Skręt w prawo Serial.println("Turning right"); motor1.setSpeed(255); motor1.run(FORWARD); motor2.setSpeed(255); motor2.run(BACKWARD); motor3.setSpeed(255); motor3.run(FORWARD); motor4.setSpeed(255); motor4.run(BACKWARD); break; case 'L': // Skręt w lewo Serial.println("Turning left"); motor1.setSpeed(255); motor1.run(BACKWARD); motor2.setSpeed(255); motor2.run(FORWARD); motor3.setSpeed(255); motor3.run(BACKWARD); motor4.setSpeed(255); motor4.run(FORWARD); break; case 'S': // Stop Serial.println("Stopping"); motor1.setSpeed(0); motor1.run(RELEASE); motor2.setSpeed(0); motor2.run(RELEASE); motor3.setSpeed(0); motor3.run(RELEASE); motor4.setSpeed(0); motor4.run(RELEASE); break; default: Serial.println("Unknown command"); break; } } } #include <WiFi.h> // Nazwa i hasło sieci Wi-Fi const char* ssid = "RC_CONNECTION"; const char* password = "12345678"; // Inicjalizacja serwera WiFiServer server(80); // Piny dla Serial1 const int RX_PIN = 16; const int TX_PIN = 17; void setup() { Serial.begin(115200); Serial1.begin(9600, SERIAL_8N1, RX_PIN, TX_PIN); // Używamy Serial1 do komunikacji z Arduino // Ustawienie ESP32 jako Access Point WiFi.softAP(ssid, password); Serial.println("Access Point utworzony:"); Serial.print("SSID: "); Serial.println(ssid); Serial.print("IP address: "); Serial.println(WiFi.softAPIP()); // Uruchomienie serwera server.begin(); } void loop() { WiFiClient client = server.available(); // Sprawdzenie, czy są klienci if (client) { Serial.println("New connection"); String currentLine = ""; // do trzymania danych z klienta while (client.connected()) { if (client.available()) { char c = client.read(); Serial.write(c); // Wysyła komendę do komputera przez Serial if (c == '\n') { // Przetwarzanie żądania GET Serial.println("Processing request:"); Serial.println(currentLine); // Wysłanie komendy do Arduino przez Serial1 if (currentLine.indexOf("GET /?State=F") >= 0) { Serial1.println("F"); } else if (currentLine.indexOf("GET /?State=B") >= 0) { Serial1.println("B"); } else if (currentLine.indexOf("GET /?State=R") >= 0) { Serial1.println("R"); } else if (currentLine.indexOf("GET /?State=L") >= 0) { Serial1.println("L"); } else if (currentLine.indexOf("GET /?State=S") >= 0) { Serial1.println("S"); } // Wysłanie odpowiedzi do klienta client.println("HTTP/1.1 200 OK"); client.println("Content-type:text/html"); client.println(); client.println("Komenda otrzymana"); client.println(); break; } else if (c != '\r') { currentLine += c; } } yield(); // Dodanie yield() w celu uniknięcia resetowania przez watchdog } client.stop(); Serial.println("Client Disconnected"); } delay(10); // Dodanie niewielkiego opóźnienia, aby odciążyć procesor }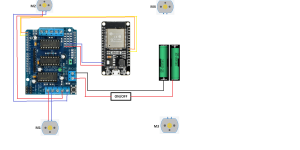
-
Cześć:) Planuję budowę urządzenia opartego o esp32 oraz moduł gsm SIM800. Zadaniem urządzenia ma być zebranie kliku prostych informacji z czujników (stan niski/wysoki), przesłanie ich przez gsm na serwer, a następnie uśpienie esp32 i SIM800 na 5 min. Całość musi być zasilana z baterii AA. Najważniejsze w projekcie jest to, by jak najrzadziej wymieniać baterie. W dokumentacji technicznej wyczytałem, że moduł SIM800 potrzebuje nawet 2A w piku. Zastanawiałem się czy w związku z tym, musze stosować przetwornicę o wydajności 2A (która jest dość droga), czy mogę zastosować przetwornicę np. 1A, ale przed uruchomieniem modułu gsm ładować kondensatory, z których sim800 pobierałby energię. Czy w moich rozmyślaniach jest sens? Czy muszę się pchać w drogą przetwornicę 2A? Jeżeli tak to jaką polecacie?
-
Witam serdecznie ponownie, Udało mi się ukończyć poprzedni projekcik - SDK + alarm, więc przyszła kolej na kolejny. Celem projektu jest dobrze znana automatyczna pompa wody, która będzie mierzyć poziom wilgotności gleby. Jeśli chodzi o stronę programowalną to pestka, ale z kolei mam niepewność względem podłączenia. Na schemacie poniżej został stworzony układ w jaki połączyłem elementy, i chciałem zapytać czy jest to poprawne podłączenie, czy nie brakuje tutaj jakiegoś elementu. Na forum gdzieś znalazłem schemat podłączenia, ale była tam zainstalowana pompka bodajże 6V, która zasilało się baterią. Tutaj mam zasilacz 240/12V, 2,5A oraz pompkę 12V z poborem 300 mA więc jest w miarę podobnie. Pomiędzy zasilaczem a przekaźnikiem wstawiłem przełącznik i wpiąłem go do wejścia COM, a przewód zasilający(+) z pompki do NO. Problem mi przysporzyło zrozumienie działania przekaźnika, i jeżeli dobrze rozumiem działa to w ten sposób, że jeżeli obwód przechodzi przez wejście NO, to pompka uruchomi się dopiero wtedy gdy przez przekaźnik poleci napięcie z Arduino(sygnał sterujący), a NC jest to obwód który działa od razu w momencie otrzymania zasilania z sieci(nie wymaga sygnału sterującego). Czy ten wywód jest poprawny? Ponownie mam nadzieję, że temat w dobrym miejscu, Z góry dziękuje za odpowiedzi, pozdrawiam.

-
Dobra a więc tak robie swój pierwszy projekt czyli mój gameboy i żeby jakoś zasilić arduino kupiłem baterie lipo 1000mah 3,7v i moduł solar charger shield od seeed naładowałem baterie i podłączyłem moduł do arduino wgrałem kod na gameboya i włączyłem zasilanie a dioda na arduino sie zaswieciła na zielono lecz arduino nie wykonuje kodu czy ktoś może mi coś poradzić?
-
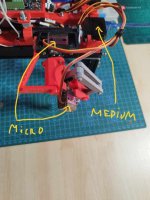
Cześć, zbudowałem robota kroczącego składającego się z 12 serw. 4x serwo typu medium (Power HD HD-1160A z plastikowymi przekładniami) i 8x serwo typu micro (MG-90S z metalowymi przekładniami), serwa zasilane są battery Packiem (4x bateria AA 1,5V) 6V oraz Arduino mega, które zasilam 5V. Po wykonaniu dwóch kroków robot się zapada i serwa medium się wyłączają (serwa umieszczone na ramie robota) a serwa micro działają i wykonują dalsze ruchy nogi. Podejrzewam, że problem leży przy zasilaniu robota, battery pack dodaje masy do robota i może być niezbyt optymalnym źródłem prądu. Po podłączeniu woltomierza, miernik pokazywał ~5V zamiast wymaganego 6V. Drugim problemem mogą być serwera medium, jakich używam, przy 6V ruch obrotowy serwa wynosi 2,7 kg*cm a serwa micro nogi mają 2,2 kg*cm również przy 6V. Po ściągnięciu battery packa, robot działał dobrze do pewnego momentu, gdy się zawalił, serwa przestały być „naprężone” co wynikało by z braku odpowiedniego zasilania. Czy ktoś z Was wie, gdzie może leżeć przyczyna problemu? Z góry dziękuje. Film z działania robota oraz zdjęcie nogi w załącznkiu poniżej:
.thumb.gif.c2c9bb5f5555557ab50711a524a00ad6.gif)
-

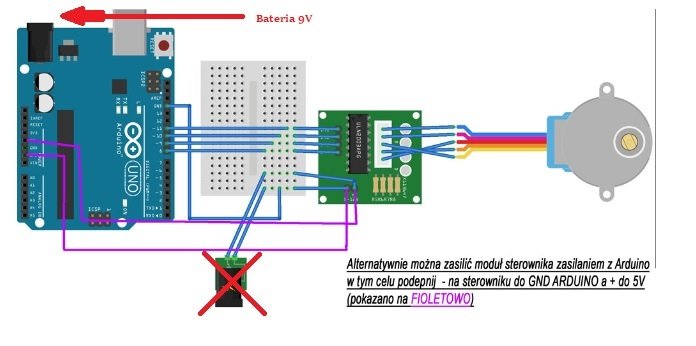
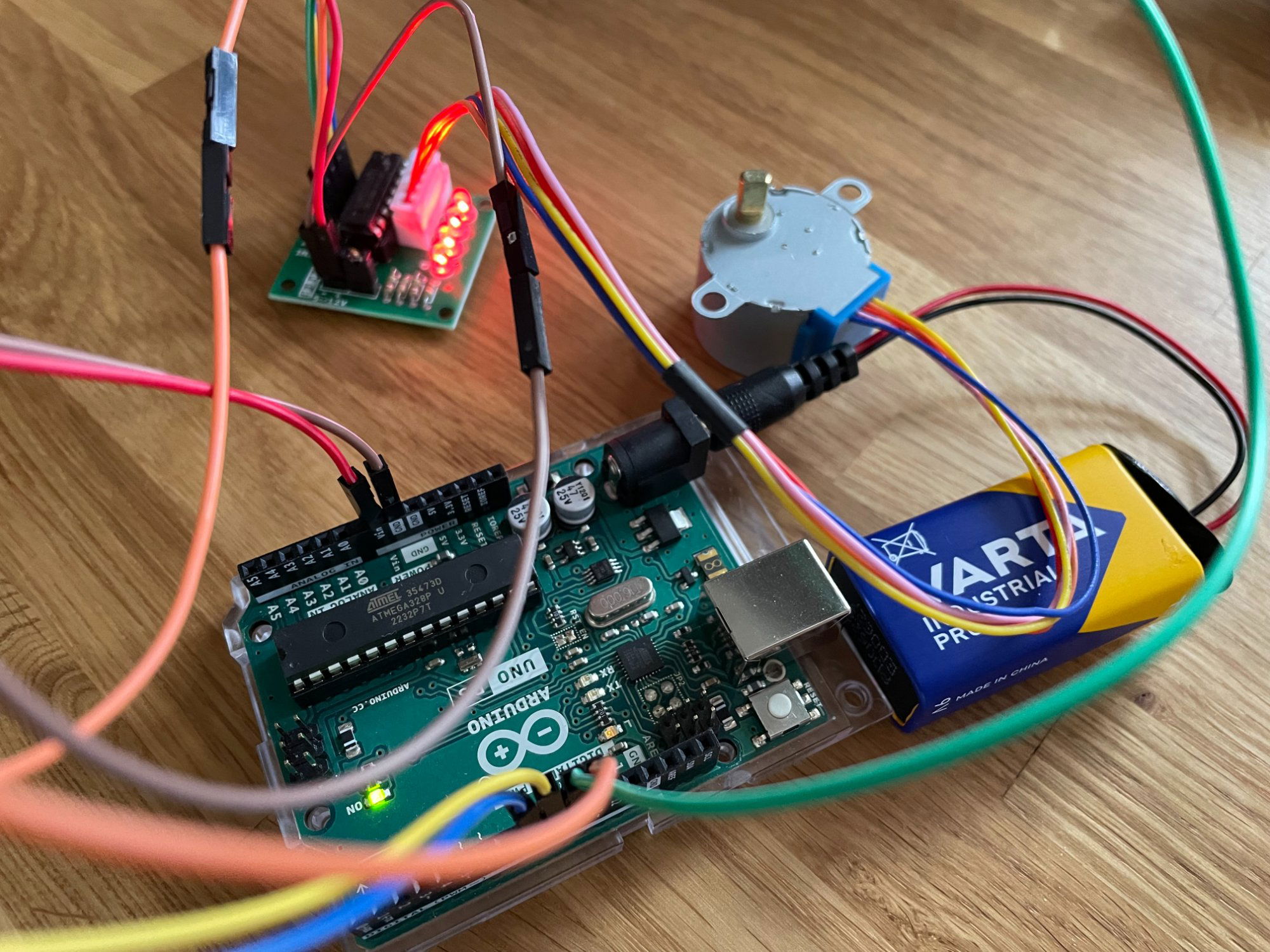
Czy moge zasilic plytke Arduino i silniki z jednej baterii 9V?
takazabazrowu opublikował temat w Arduino i ESP
Dz ień dobryChciałbym się dowiedzieć czy mogę zasilać z baterii 9V plytkę arduino UNO i silniki 5V? Robięaktualnie projekt z dwoma silnikami i plytka arduino, chcę to zasilac z jednej bateri 9V i chcę to zrobić tak że podłączę do bateri plytkę i stabilizatory napięcia ktore z 9v beda robic 5v (dla silnikow) a stabilizatory do tranzystorow a tranzystory do plytki i silnikow. (Bede sterował napieciemdla silnikow poprzez płytkę) -

Poradnik Połączenia zasilaczy - szeregowo? równolegle?
H1M4W4R1 opublikował temat w Artykuły użytkowników
Wstęp Ten artykuł jest skierowany do użytkowników, którzy chcieliby połączyć kilka zasilaczy razem, aczkolwiek zastanawiają się jak to zrobić bezpiecznie. Autor nie ponosi odpowiedzialności za wszelkie usterki i szkody wynikające ze stosowania zamieszczonych tu treści. Fotografia 1: Zdjęcie poglądowe zasilacza typu SMPS (Flickr, Marco Verch, CC BY 2.0) Rodzaje połączeń Zasilacze możemy łączyć szeregowo i równolegle – i zanim ktokolwiek powie, że to niebezpieczne: jest to bezpieczne o ile zachowa się pewne środki ostrożności. Wyróżniamy trzy główne rodzaje połączeń: PP (Parallel Power) – równoległe połączenie w celu zwiększenia mocy wyjściowej PR (Parallel Redundancy) – równoległe połączenie w celu zabezpieczenia układu w przypadku uszkodzenia jednego (lub większej ilości) zasilaczy SC (Series Connection) – połączenie szeregowe w celu zwiększenia napięcia wyjściowego. Parallel Power Rysunek 2: połączenie równoległe zasilaczy W teorii możemy wykorzystać ten rodzaj połączenia z każdym zasilaczem, aczkolwiek rezultaty mogą nie być satysfakcjonujące. Niektórzy dostawcy oznaczają zasilacze jako kompatybilne z PP, aczkolwiek tak zdecydowanie nie jest (pozdrawiamy przyjaciół z Chin). Problemem w tym trybie jest to, by prąd między zasilaczami był dzielony jak najrówniej – co innymi słowy przekłada się na identyczną impedancję i napięcie wyjściowe obu zasilaczy w danej chwili. Znając nasz świat możesz łatwo się domyślić, że nie jest to proste zadanie – wpływ na te czynniki ma np. tempratura czy wiek zasilacza. Dodatkowo w czasie rozruchu i przeciążenia zasilacze mogą zachowywać się nieprzewidywalnie. Niezbalansowany pobór prądu może spowodować przedwczesne starzenie się niektórych zasilaczy w układzie, a co za tym idzie zmniejszyć niezawodność systemu. Producenci wprowadzili wiele różnych technik, by zapobiec takim efektom np. LSB (Load Share Bus) – zasilacze komunikują się między sobą (dostępne najczęściej w najbardziej zaawansowanych modelach) – np. NPS2400 SRA (Specific Regulation Algorithms) – tanie rozwiązanie, które pozwala na dopasowanie parametrów wyjściowych na bazie algorytmów, co przekłada się na naturalny podział prądu między jednostkami – np. NPST501 ARM (Active Redundancy Module) – zewnętrzny moduł redundancyjny pozwala na zbalansowanie impedancji wyjściowej zasilaczy – każdy zasilacz powinien móc być zastosowany z tym rozwiązaniem, aczkolwiek najlepiej to przetestować Zasady implementacji połączenia PP: Uwzględnij dostępną moc systemu (nie powinieneś sumować mocy wyjściowej zasilaczy, ale sumę pomnożyć przez 0.75-0.8 – nie ma idealnych połączeń). Używaj identycznych modeli zasilaczy – najlepiej z tej samej serii fabrycznej Używaj tylko zasilaczy z trybem Constant Current (inne mogą powodować problemy) Niektóre zasilacze posiadają opcję CC, która jest wyłączona. Zalecane jest jej włączenie. Ogranicz ilość zasilaczy w układzie (najlepiej < 4) Umieść zasilacze możliwie blisko siebie (w takich samych warunkach wilgotności / temperatury, by zredukować wpływ otoczenia) Przed połączeniem ustaw napięcie wyjściowe zasilaczy – podłącz je do obciążenia w wysokości ok. 10% nominalnego. Napięcia powinny być ustawione z dokładnością +/- 20mV. Użyj takich samych przewodów (długość i grubość) między każdą jednostką i obciążeniem. Przewody powinny skupiać się przy obciążeniu, a nie przy zasilaczach – to poprawia symetrię obciążenia. NIE STOSUJ TOPOLOGII DAISY-CHAIN! Po 30 minutach działania zweryfikuj obciążenie prądowe i dostosuj napięcia, by je zbalansować. Parallel Redundancy Rysunek 3: połączenie redundancyjne zasilaczy z diodami Rysunek 4: połączenie redundancyjne zasilaczy z modułem ORing Redundancja jest istotna w przypadku urządzeń krytycznych dla danej architektury. Zabezpiecza ona przed niezapowiedzianą awarią modułu, który może spowodować zagrożenie – zarówno dla ludzi jak i dla maszyn. Dzięki tej technice połączenia maksymalny prąd jest dostępny nawet po wystąpieniu awarii zasilacza, co zapobiega ewentualnym wyłączeniom sprzętu – co za tym idzie należy wykorzystać w tym celu kilka zasilaczy. Oprócz tych zasilaczy należy dodać też zasilacze "nadmiarowe" (redundancyjne) – przynajmniej jeden. Im więcej ich użyjemy tym większe będzie nasze zabezpieczenie przed awariami. By osiągnąć niezawodny system redundancyjny wyprowadzenia zasilaczy powinny być odseparowane modułem ORing (redundancji) lub odpowiednimi obwodami (diodami / tranzystorami MOSFET). Jeżeli jeden z zasilaczy ulegnie uszkodzeniu i zacznie stanowić zwarcie, to obwody te zabezpieczą przed przepływem prądu do uszkodzonego zasilacza, a co za tym idzie spadkowi napięcia i maksymalnej mocy układu. Zasady implementacji połączenia "PR": Ustal ile potrzebujesz nadmiarowych zasilaczy, by osiągnąć zadowalający poziom redundancji. Uwzględnij, iż w danym momencie tylko jeden zasilacz może przyjąć na siebie całe obciążenie (jest to istotne w przypadku modułów Oring, które posiadają określone limity natężenia i napięcia). Zawsze używaj identycznych zasilaczy (najlepiej z tej samej serii). Postaraj się zbalansować napięcie wyjściowe zasilaczy do +/- 20mV – wydłuży to żywotność systemu. Umieść wszystkie zasilacze w tych samych warunkach środowiskowych (temperatura, wilgotność etc.) Użyj identycznych przewodów (długość / grubość), które skupiają się przy obciążeniu – to poprawia symetrię obciążenia. Series Connection Rysunek 5: Połączenie szeregowe zasilaczy Niektóre zastosowania jak np. moduły EuroRack mogą wymagać zastosowania połączenia szeregowego zasilaczy. Takie połączenie pozwala uzyskać napięcie, bądź moc niedostępną dla pojedynczego modułu. Warto mieć na uwadze: Największy dostępny prąd jest równy najmniejszemu prądowi nominalnemu zasilacza w układzie Maksymalna moc jest efektem iloczynu sumy napięć i najmniejszego prądu nominalnego zasilaczy. Jednostki o różnej impedancji / źródłach zasilania / napięciach wyjściowych / mocy mogą być połączone szeregowo. Zasady implementacji połączenia SC: Postaraj się użyć identycznych jednostek (najlepiej z tego samego źródła) Zwróć uwagę na niezbędne dostępne natężenie prądu (by zapobiec przeciążeniu zasilaczy) Niektóre jednostki mogą mieć inny czas rozruchu. By zapobiec odwrotnej polaryzacji należy zastosować diody zabezpieczające (maksymalne napięcie diody powinno być większe niż suma napięć zasilaczy, a maksymalny prąd impulsowy diody powinien być większy niż największe nominalne natężenie zasilacza w układzie). Uważaj, gdy pracujesz z napięciami >60V, które mogą być niebezpieczne dla człowieka. Dopasuj przewody do parametrów układu i połącz je w topologię DAISY-CHAIN w stronę obciążenia. Unikaj używania zbyt dużej ilości zasilaczy (aka. > 4). Inne uwagi Warto sprawdzić, czy zasilacze są odizolowane (czy uziemienie i linia neutralna nie są połączone z masą napięcia DC) – czasami zdarzają się zasilacze, które nie spełniają tych wymogów (mimo, iż naruszają tym przepisy bezpieczeństwa) - jeżeli nie są, to nie należy ich stosować w żadnym z powyższych połączeń! O ile to możliwe unikaj konfiguracji PP, gdyż potrafi ona być bardzo nieprzewidywalna. Jeżeli tworzysz systemy, których działanie jest istotne zastosuj układ redundancyjny.




-
Jestem laikiem i niestety nie udało mi się znaleźć w internecie odpowiedzi na moje pytanie. Mam 1m taśmy LED czerwonej i 8m taśmy LED białek. Taśmy 10W/m. Chcę to zasilić z jednego zasilacza 100W. 1) Czy 100W wystarczy? 2) Jak podłączyć zasilanie do taśm? Wiem, że nie powinno się łączyć szeregowo różnych kolorów i nie wiem jak to obejść... Nie mogę skopiować linku do allegro więc wrzucam screena zasilacza. Będę wdzięczny za pomoc, Łukasz

-
Witam Mam pytanie odnośnie doboru części do robota. Sytuacja wygląda tak mam zakupione podwodzie do robota z kołami mecanum, silnikami DC z przekładnią jeden do 1:48, Napięcie zasilania 3V-6V, Pobór prądu 170 mA. W robocie mam zamiar użyć Arduino i sterować nim z telefonu przez Bluetooth. Pytanie pierwsze: Czy jeśli chce użyć sterowników L298N do sterowania silnikami to potrzebuję jakiś przetwornic step down, żeby nie spalić silników i sterowników, jeżeli wymagane źródło napięcia okazałoby się większe niż 6V? Pytanie drugie: Jakiego źródła zasilania najlepiej użyć do tego przedsięwzięcia? Pytanie Trzecie: Jakiego modułu Bluetooth użyć do tego najlepiej (chodzi mi o to żeby sterować silnikami z telefonu)? Widziałem że większość projektów z Arduino, bo korzysta z HC-05. Czy HC-05 to dobory wybór dla laika?
-

Podłączenie silnika krokowego i wyświetlacza LCD do Arduino
JakubKozak opublikował temat w Arduino i ESP
Mam pytanie dotyczące podłączenia wyświetlacza LCD i silnika krokowego. Czy mogę zasilać wyświetlacz LCD z 5v a silnik krokowy z Vin? Czy lepiej podłączyć baterie bezpośrednio do płytki stykowej a wyświetlacz LCD zasilać z portu usb? Nie do końca rozumiem jak działa Vin.

-
Robot który zbudowałem na sobotnie zawody okazało się że w losowych momentach na trasie przestaje jechać. Zatrzymuje się na kilka sekund i czasem rusza znowu a czasem słychać tylko pyknięcie, robot minimalnie drgnie i dalej się zawiesza. Podczas tych zawieszeń diody rx, tx i wbudowana przestają migać, świeci się dioda ON oraz diody sygnalizujące prawidłowy przepływ prądu w 2 miejscach na 2 płytkach. Zwykle pomaga reset ale muszę rozwiązać problem jak najszybciej bo zawody są już w tą sobotę a muszę jeszcze przeprowadzić testy. Więcej o robocie: Typowa konstrukcja z dwoma kołami z tyłu i platformą z 8 czujnikami z przodu Silniki to polulu hp micro z przekładnią file:///C:/Users/Admin/Downloads/Photo-1.jpeg1:10 Zasilane akumulatorem lipo 500mah 11,1V po stabilizatorze na 6V Użyty jest sterownik silników 2-kanałowy sparkfun Algorytm to zwykły PID (po odkryciu problemu zredukowany do samego P i sprawdzony, problem raczej nie leży po stronie programu) Sprawdziłem: po podpięciu przez kabel (bez akumulatora) - działa gdy koła są w powietrzu- działa gdy zablokuję koła- działa gdy zablokuję koła i przyłożę do podłoża czujniki- nie działa PS testy powyżej są dla bardzo niskiej prędkości, około 25% maksymalnej prędkości silników. Po zwiększeniu zadanej prędkości silniki kompletnie odmawiają współpracy.

-
Cześć, zrobiłem taki układ: Jednak, gdy podłączam silniki, niezależnie czy z podłączoną baterią czy bez, Arduino przestaje wykonywać kod i zanika pomarańczowa dioda. Gdy odłączę silnik lub go zatrzymam wszystko wraca do normy. Moje silniki to MT84. Używam dokładnie tego samego mostka H jak na rysunku: L293D. Miał ktoś może podobny problem i mógłby się podzielić swoją wiedzą?
-

Przerwania i spadki napięcia przy dotknięciu pinu Arduino Nano
maksz42 opublikował temat w Arduino i ESP
Cześć, w moim projekcie miałem losowe przerwania. Rozkładając problem na czynniki pierwsze doszedłem do (chyba) źródła. Na Arduino Nano (chińskie na ch340) wrzuciłem ten kod (proszę nie prawić morałów o digitalPinToInterrupt(), nie w tym problem ) void blink(){ digitalWrite(LED_BUILTIN, HIGH); } void setup() { pinMode(2, INPUT_PULLUP); pinMode(LED_BUILTIN, OUTPUT); attachInterrupt(0, blink, FALLING); } void loop(){} Gdy czymś metalowym (zaizolowanym lub nie) dotykam pinu 2, +5V lub masy wyzwala się przerwanie, a oscyloskop widzi szpilkę na linii +5V. Próbowałem zewnętrznego pull-up 2k, kondensatorów na pinie 2 i na zasilaniu, ale to nic nie dało. Na zasilaniu z baterii (4xAA; 4,9v) bezpośrednio do +5V jest to samo. Sprawdziłem na kilku Nano (wszystkie chińskie na ch340). Jak to możliwe że dotykając nożem masy wyzwala się przerwanie? Co to w ogóle za zjawisko fizyczne, jakaś pojemność? I jak zapobiec? -
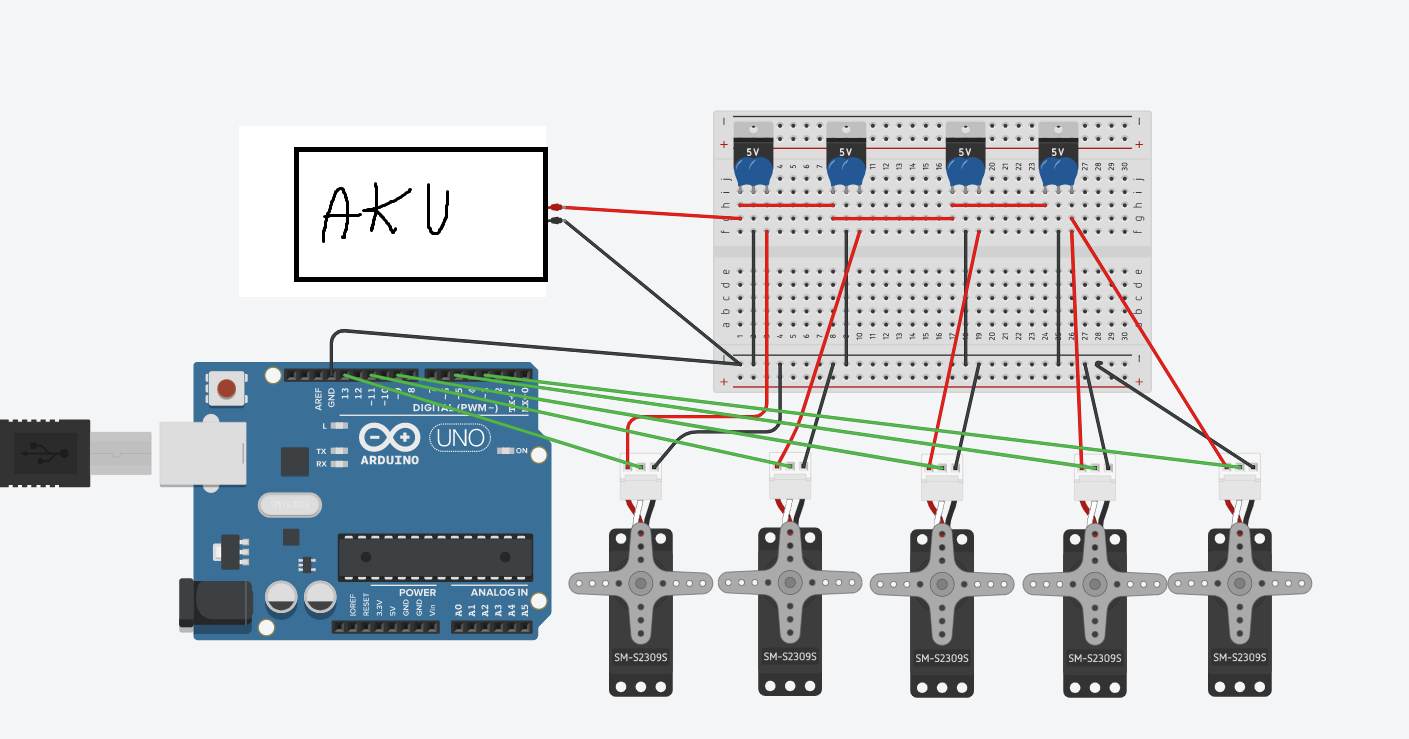
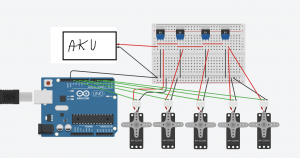
Witam, chcąc połączyć arduino uno, klawiaturę i 5 serwomechanizmów MG996R występują dziwne wariacje niektórych serwomechanizmów (nie zawsze tych samych).Po kilkukrotnym szybkim kliknięciu przycisków, zaczynało wariować. Miałem zaprogramowany przycisk, w którym wszystkie 5 serw pracuje w jednym momencie, wtedy jest największe zapotrzebowanie na prąd i po kilkukrotnej pracy serwomechanizmów, któreś (lub dwa) zawsze zaczynało się kręcić wokół własnej osi, bez końca. Początkowo zasilałem to baterią 9V (poprzez regulator napięcia 5V), wariowały. Stwierdziłem że potrzebny jest większy prąd, to podpiąłem to wszystko pod akumulator od ciągnika (oczywiście przez regulatory 5V), nadal to samo [w załączniku wstawiam zdjęcie połączenia, mam nadzieję że dobrze podłączam, albo tu tkwi problem?]. Potem, aby wyeliminować błędny kod, podpiąłem jedno serwo i potencjometr, na nowym kodzie (prostym) kręcąc potencjometrem, wszystko działało pięknie, lecz po jakichś 2 minutach zaczęło się kręcić w kółko. Nie mam pojęcia co może być przyczyną. Koncepcją główną jest sterowanie serwomechanizmami za pomocą zmiany rezystancji, więc w jednej chwili zazwyczaj będą pracowały wszystkie na raz. Potrzebuję pomocy i z góry dziękuję!
-
Cześć, potrzebuję zasilić układ EMG napięciem symetrycznym -9 i 9V. Najlepiej jakby napięcie ujemne było stabilizowane. Przez chwilę używałem układu NE555 do otrzymania napięcia ujemnego ale zwykle dostaje z tego od -7,5V do -8V. Układy z wirtualną masą też odpadają. Znalazłem układ Lmc 7660 ale nie jestem pewien czy się nada do tego. Czy jeżeli ustabilizuje napięcie wejściowe na taki scalak dajmy na to układem 7809 do 9V to czy ujemne napięcie wyjściowe z tego układu też będzie ustabilizowane, tzn czy będę miał spadki napięcia jak podłączę układ EMG? Może wie ktoś coś o jakimś innym scalaku, który od razu da mi na wyjściu ustabilizowane napięcie ujemne? Wszystkie płytki/układy większe niż 1cmx1cm odpadają.
-
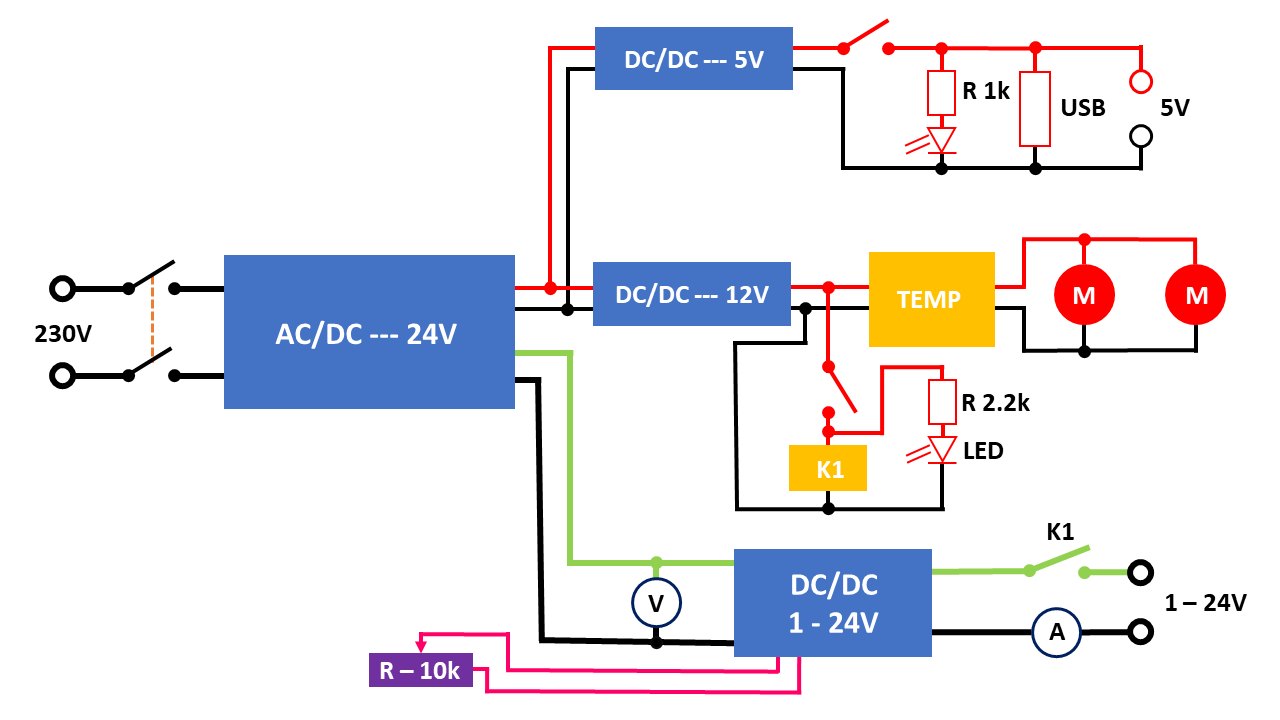
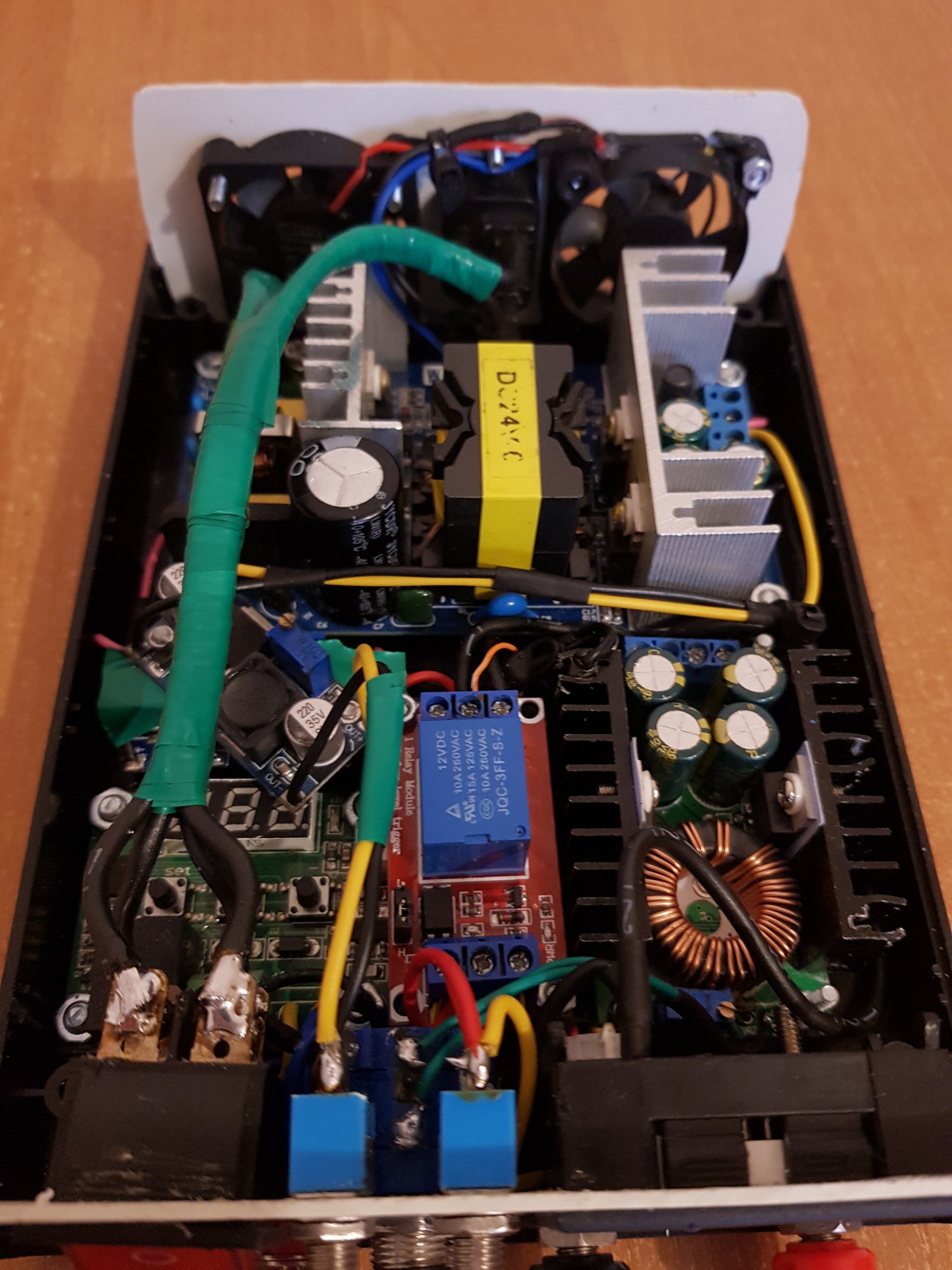
 Cześć, Chciałbym Wam zademonstrować, jak niewielkim kosztem można zbudować wydajny zasilacz warsztatowy. Prezentowany zasilacz został oparty o gotowe moduły dostępne na AliExpres. Celem zasilacza nie jest dostarczanie zasilania, do układów wymagających stabilnego źródła zasilania, a jedynie zasilanie urządzeń prototypowych oraz elektronarzędzi. W głównym założeniu projektu to zasilacz uniwersalny. Założenia projektowe: Zasilanie urządzeń/prototypów realizowanych przeze mnie prywatnych projektów. Tu jest dla mnie bardzo istotny zakres regulowanego napięcia oraz wydajność prądowa, Maksymalnie niski koszt budowy i eksploatacji, Maksymalnie niewielkie rozmiary i waga. Dlatego m.in rezygnowałem z klasycznego transformatora, Aktywny system chłodzenia składający się z dwóch wentylatorów sterowanych termostatem. Zadaniem jednego wentylatora jest wtłaczanie powierza a drugiego wypychanie, Odłączane wyjścia za pomocą przekaźnika. W zasilaczu można najpierw ustawić napięcie, a dopiero później załączyć je na wyjście układu, Diody LED sygnalizujące pojawienie się napięcia na wyjściu. Technicznie sygnalizują stan pracy przekaźnika, Wyjście USB m.in. do podłączenia Arduino oraz dedykowane złącza bananowe dostarczające napięcie 5V i prąd 1A, Cyfrowy Amperomierz i Woltomierz. Paramtery techniczne: Regulacja napięcia w zakresie od 1 do 24V, Wydajność prądowa do 8A. Celowo rezygnowałem z funkcji regulacji natężenia prądu. Schemat blokowy: Na schemacie pominięto zasilanie mierników. Wykonanie: Powodzenia w konstruowaniu własnych wersji i ulepszaniu. W razie pytań zapraszam do dyskusji Wykorzystane gotowe moduły: https://www.aliexpress.com/item/1005001665864650.html https://www.aliexpress.com/item/4000411636926.html https://www.aliexpress.com/item/4000064597454.html https://www.aliexpress.com/item/1005001831017918.html https://www.aliexpress.com/item/32225252366.html https://www.aliexpress.com/item/4001018463151.html
Cześć, Chciałbym Wam zademonstrować, jak niewielkim kosztem można zbudować wydajny zasilacz warsztatowy. Prezentowany zasilacz został oparty o gotowe moduły dostępne na AliExpres. Celem zasilacza nie jest dostarczanie zasilania, do układów wymagających stabilnego źródła zasilania, a jedynie zasilanie urządzeń prototypowych oraz elektronarzędzi. W głównym założeniu projektu to zasilacz uniwersalny. Założenia projektowe: Zasilanie urządzeń/prototypów realizowanych przeze mnie prywatnych projektów. Tu jest dla mnie bardzo istotny zakres regulowanego napięcia oraz wydajność prądowa, Maksymalnie niski koszt budowy i eksploatacji, Maksymalnie niewielkie rozmiary i waga. Dlatego m.in rezygnowałem z klasycznego transformatora, Aktywny system chłodzenia składający się z dwóch wentylatorów sterowanych termostatem. Zadaniem jednego wentylatora jest wtłaczanie powierza a drugiego wypychanie, Odłączane wyjścia za pomocą przekaźnika. W zasilaczu można najpierw ustawić napięcie, a dopiero później załączyć je na wyjście układu, Diody LED sygnalizujące pojawienie się napięcia na wyjściu. Technicznie sygnalizują stan pracy przekaźnika, Wyjście USB m.in. do podłączenia Arduino oraz dedykowane złącza bananowe dostarczające napięcie 5V i prąd 1A, Cyfrowy Amperomierz i Woltomierz. Paramtery techniczne: Regulacja napięcia w zakresie od 1 do 24V, Wydajność prądowa do 8A. Celowo rezygnowałem z funkcji regulacji natężenia prądu. Schemat blokowy: Na schemacie pominięto zasilanie mierników. Wykonanie: Powodzenia w konstruowaniu własnych wersji i ulepszaniu. W razie pytań zapraszam do dyskusji Wykorzystane gotowe moduły: https://www.aliexpress.com/item/1005001665864650.html https://www.aliexpress.com/item/4000411636926.html https://www.aliexpress.com/item/4000064597454.html https://www.aliexpress.com/item/1005001831017918.html https://www.aliexpress.com/item/32225252366.html https://www.aliexpress.com/item/4001018463151.html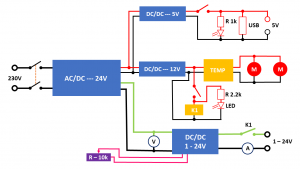




-

silnik DC 250W Jak zasilić 3 silniki DC 250W 24V równocześnie z kilku rodzajów akumulatorów?
Gość opublikował temat w Zasilanie
Tytuł dość długi, ale i sam projekt trzykołowej platformy do przewożenia ciężarów w bardzo trudnym terenie, też nie jest prosty. Każde koło z silnikiem DC 250W 24V posiada przekładnię zmniejszającą obroty, ale za to zwiększającą ich moment obrotowy. Materiały do wykorzystania: 1/- 3 silniki DC 250W 24V ze sterownikami, na moje szczęście, w wersji bez odzyskiwania energii, 2/- Akumulatory żelowe 12V 7 Ah, 3/- Akumulatory żelowe 12V 12 Ah, 4/- Akumulatory wysokoprądowe od elektronarzędzi 14V - 36V li-ion 18650 3Ah - 6Ah, 5/- Akumulatory średnioprądowe li-ion od deskorolek i rowerów 24V - 36V 18650 4,4Ah - 15Ah , 6/- Ogniwa średnioprądowe li-po 3,6V 10Ah - 14Ah (od rowerów elektrycznych) , 7/- Ogniwa średnioprądowe li-ion 3,7V 18650 2,0Ah - 3,4Ah (z rozbiórki bateri do laptopów) , 8/- Ogniwa średnioprądowe lifepo4 3,2V 3,5Ah - 7Ah, 9/- Przetwornice step-up od 300W do 1800W, 10/- Przetwornice step-down od 150W do 600W, 11/- Przetwornice step-up step-down 150W do 300W, 12/- Wszystko co okaże się niezbędne. Oryginalnymi źródłami zasilania dla tych silników są łączone w szereg po 2 akumulatory żelowe. 2x 7Ah zasila jeden silnik, a 2x12Ah zasila dwa pozostałe silniki. Oba układy pracują niezależnie, a ja chcę je połączyć, ale tak, żeby była możliwość podłączenia do nich, każdego innego akumulatora z już posiadanych lub, które wykonam z posiadanych ogniw. Oczywiście każdy nowy akumulator będzie wykonywany zgodnie z wszystkimi zasadami i z ogniw tego samego rodzaju i pojemności. Z uwagi na fakt teoretycznego rozwiązywania problemu, pomijam ciężar akumulatorów. Przyjąłem założenie, że średnim napięciem będzie 29V, a wszystkie źródła zasilania podzielę na 3 grupy, różniące się złączmi i sposobem podłączenia do układu: 1- akumulatory żelowe - podłączane bezpośrednio tak jak obecnie, złącza wsuwane 6,4mm 2- akumulatory do 7s o napięciu niższym od 28V, złącza EC3 i przetwornice step-up do 29V 3- akumulatory 10s o napięciu wyższym od 31V, złącza EC5 i przetwornice step-down do 29V Dlaczego 29V, bo założyłem, że to akumulatory żelowe, najlepiej przystosowane do pracy pod ciągłym ładowaniem, jako ostatnie będą mogły oddać całą nagromadzoną w sobie moc, gdy już wszystkie przetwornice zostaną odłączone przez BMS-y zabezpieczające akumulatory litowe przed nadmiernym rozładowaniem. Dodatkowo w drugim etapie, tym wykonawczym, dopuszczam z uwagi na ciężar całkowite wyeliminowanie akumulatorów żelowych i wtedy 29V wydaje się bezpiecznym wyborem zarówno dla li-ion i li-po 4s-7s i przetwornicy step-up, jak i dla li-ion i li-po 10s i przetwornicy step-down, zapewniając odpowiednią różnicę napięć niezbędną do prawidłowej pracy przetwornic. Przetwornice będą zabezpieczone diodami przed prądem zwrotnym, które dodatkowo o 0,6V zwiększą różnicę napięć, szczególnie przydatną przy strukturze 7s i przetwornicy step-up. Przy sterownikach silników, napisałem, że na moje szczęście, nie posiadają one funkcji odzyskiwania energii, bo na Forum Elektroda natrafiłem na burzliwą dyskusję, wywołaną napędem roweru elektrycznego z silnikiem BLDC, poprzez równoległe połączenie ze sobą dwóch akumulatorów, średnio i wysokoprądowego. Sednem dyskusji,był właśnie wpływ funkcji odzyskiwania energii, na działanie takiego układu. Okazywało się, że przy sinusuidalnym sterowniku, na oscyloskopie przebiegi były dalekie od sinusoidy i pomógł dopiero specjalnie dobrany dławik. Z uwagi na niższą cenę przetwornic step-up, akumulatory z posiadanych ogniw, będę w miarę możliwości budował w strukturze 5s-6s przy równoległym połączeniu 1p-5p. Największy kłopot mam z już posiadanymi akumulatorami li-ion 7s2p, bo takie z reguły były w deskorolkach, ale po prostu będę je ładować tylko do 28V, a dioda przy przetwornicy zwiększy minimalną różnicę napięć do 1,6V. Tyle tytułem bardzo długiego wprowadzenia, oczekuję od Was oceny mojego rozwiązania, wytknięcia popełnionych błędów oraz wskazówek jak to powinno prawidłowo wyglądać. Głównie chodzi mi o ocenę, czy ustalenie zasilania na 29V jest rzeczywiście dobrym rozwiązaniem oraz jakie warunki muszą spełniać akumulatory, żeby podłączyć je do jednej dużej przetwornicy step-up 1800W? -
Pojazd składa się z podanych elementów: Arduino UNO, MOTOR Shield L293D, Moduł Bluetooth HC-05, 4x silniki 5V 1:48 z podwójnym wałem /PLY153. Zbudowany jest na platformie ze sklejki, do tego ma dojść jeszcze cała obudować. Razem będzie ważył z 3 kg. Na ten moment zasilam go 3x 18650 i na wyjściu mam 11.95V - 12.15V. Kiedy trzymam go w powietrzu wszystko jest ok. Jednak jak dochodzi tarcie w czasie jazdy, to napięcie potrafi spaść do 8-9V i rozłącza mnie z nim. Tak się dzieje jeszcze z samą płytą dolną, a co dopiero jak dojdzie obciążenie. Na ten moment mój pomysł to, zrobienie koszyka na baterie 8x sztuk dzięki czemu wyjdzie mi 33V przy pełnym naładowaniu i ok 27V w normalnej jeździe. Czy jest to dobra koncepcja? Jak można ustabilizować napięcie do 12V by nie spalić płytki?
-
Witam Kupiłem ostatnio servomechanizm(https://botland.com.pl/pl/serwa-typu-standard/16493-serwo-powerhd-wh-65kg-standard-6929130065656.html). Chciałem uruchomić servo więc podłączyłem je do arduino przez wyjście "vin" i przez złącze DC podpiąłem 4 baterie aa (silnik jest zasilany od 6 - 8.4V) dla testu żeby zobaczyć jak działa. Servomechanizm nie drgnął tylko było słychać cichy terkot. Pomyślałem że 4 baterie AA są za słabe aby uciągnąć tak duże servo. Więc kupiłem akumulator SLA 6V 1.3Ah i podłączyłem do gniazda DC arduino. Sytuacja się powtórzyła i silnik tylko cichutko terkotał. Więc mam pytanie: czy coś jest nie tak z zasilaniem czy silnik jest zepsuty(jest nowy). Dodam że przy takim samym podłączeniu i programie w arduino inny servomechanizm(https://botland.com.pl/pl/serwa-typu-standard/6633-serwo-towerpro-mg-946r-standard.html) działa bez zarzutu przy podłączonych 4 bateriach AA. Z góry dziękuje













.gif.a32f88659a4becb301069b028c6ac40e.gif)