Owady są inspiracją dla wielu twórców robotów. Niestety jedna cecha insektów jest zazwyczaj pomijana – ich miniaturowe rozmiary.
Naukowcy z Uniwersytetu w Maryland stworzyli roboty kroczące ważące mniej niż 2 g. Następnie posłużyły one do sprawdzenia, który styl chodu będzie najefektywniejszy dla takich konstrukcji.
Kilkugramowe roboty, np. RoACH i HAMR, istnieją od lat. Do tej pory jednak nie były one przeznaczone do przeprowadzania eksperymentów dotyczących dynamiki robotów.
Ryan St. Pierre i Sarah Bergbreiter oparli swój pomysł na sześcionożnym robocie RHex. Jego zaletą jest fakt, że każdą z nóg można sterować niezależnie. Z początku miał być on po prostu pomniejszony w skali, ale szybko okazało się, że cztery nogi są lepszym rozwiązaniem w przypadku tak małego urządzenia.
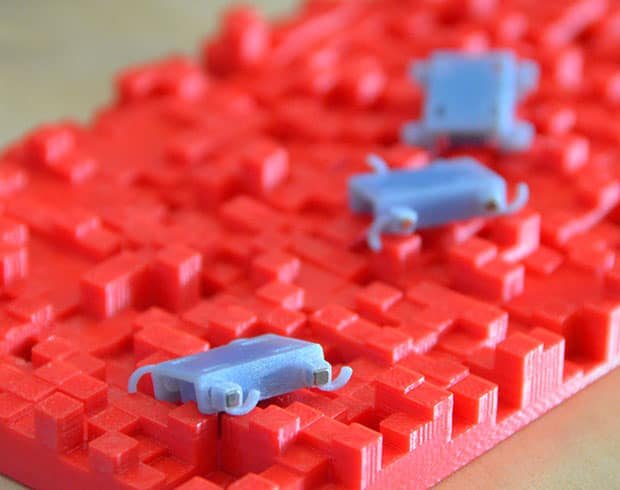
Mały robot kroczący na torze przeszkód.
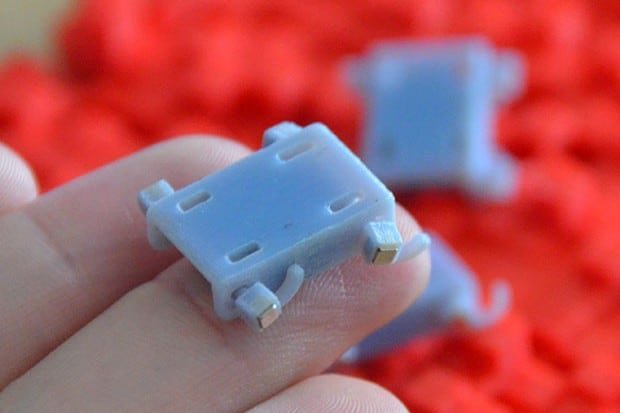
Cały robot może być wydrukowany w 3D za jednym razem. Ma 20 mm długości i 5,6 mm wysokości, waży jedynie 1,6 g.
Taka wielkość nie pozwala na zastosowanie silników ani baterii, więc urządzenie jest uruchamiane przy użyciu zewnętrznie generowanego pola magnetycznego. Każda kończyna robota posiada 2-milimetrowy magnes. Rotacja dużego magnesu, który znajduje się w pobliżu, powoduje obrót nogi.
Zmiana orientacji biegunów w magnesach powoduje zmianę rodzaju chodu. Najciekawszym z nich jest pronking – wybicie się w taki sposób, że wszystkie nogi równocześnie odrywają się od podłoża. Ten rodzaj chodu jest najlepszy do poruszania się po umiarkowanie wyboistym terenie, a jego prędkość z częstotliwością 10 Hz na równym podłożu dochodzi do 78 mm/s.
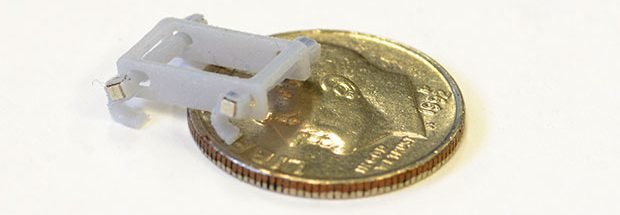
Mały robot kroczący bez obudowy.
Budowa robota pozwala na jego ciągłe ulepszanie, ponieważ wszystkie części mogą być wymienione na nowsze. Nie ma też ograniczeń jeśli chodzi o rozmiar urządzenia, o ile można w nim umieścić magnes. W tej chwili jego twórcy pracują nad 2,5-milimetrową wersją.
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.






















Trwa ładowanie komentarzy...