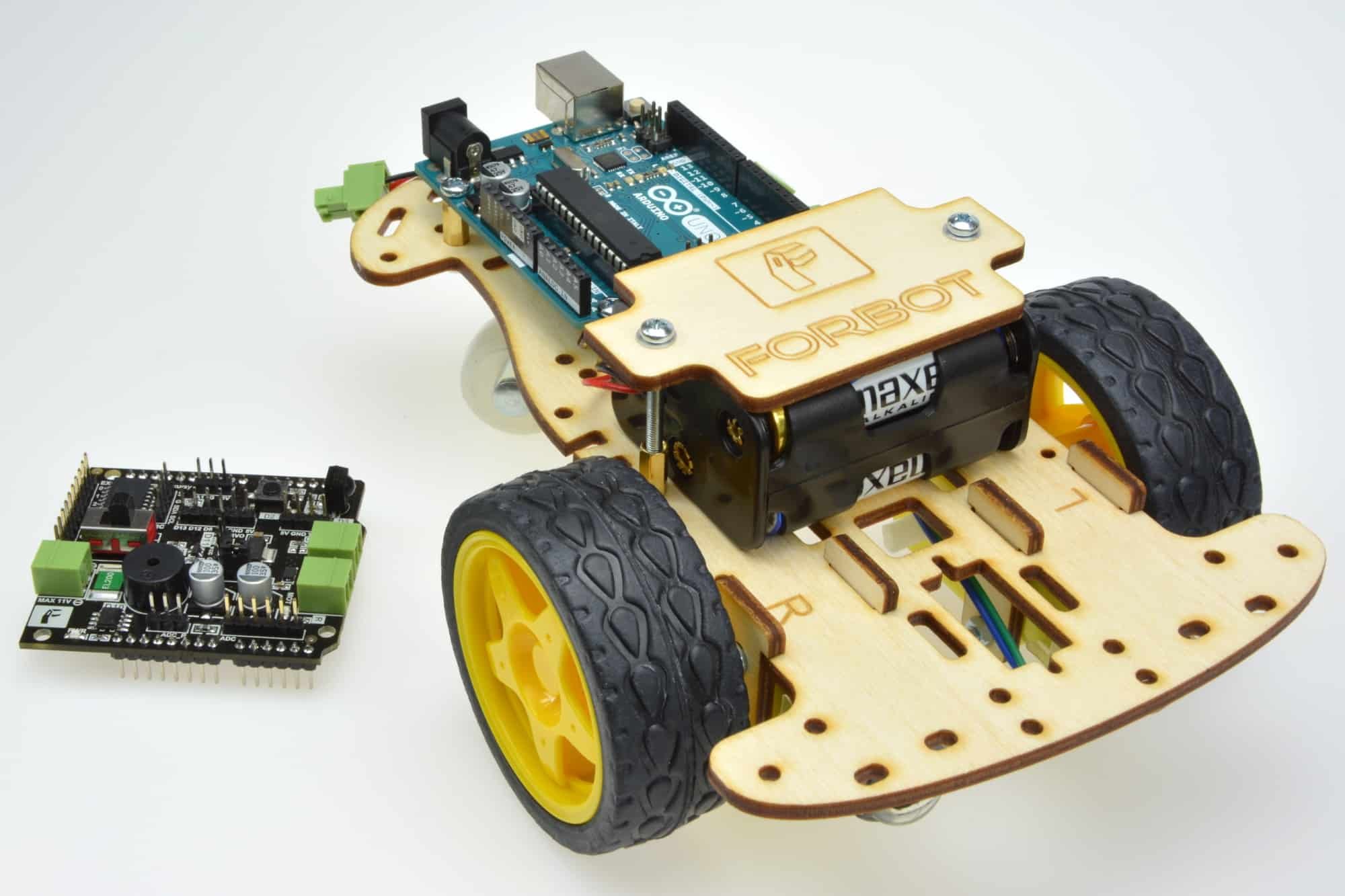
Po zapoznaniu się z wyposażeniem omówionego wcześniej shielda pora zająć się drugą, kluczową częścią tego projektu. Tym razem robot stanie na swoich (trzech) kołach.
Złożenie konstrukcji mechanicznej, to już ostatni krok przed programowaniem robota, czyli tym, co najważniejsze podczas tej serii artykułów.
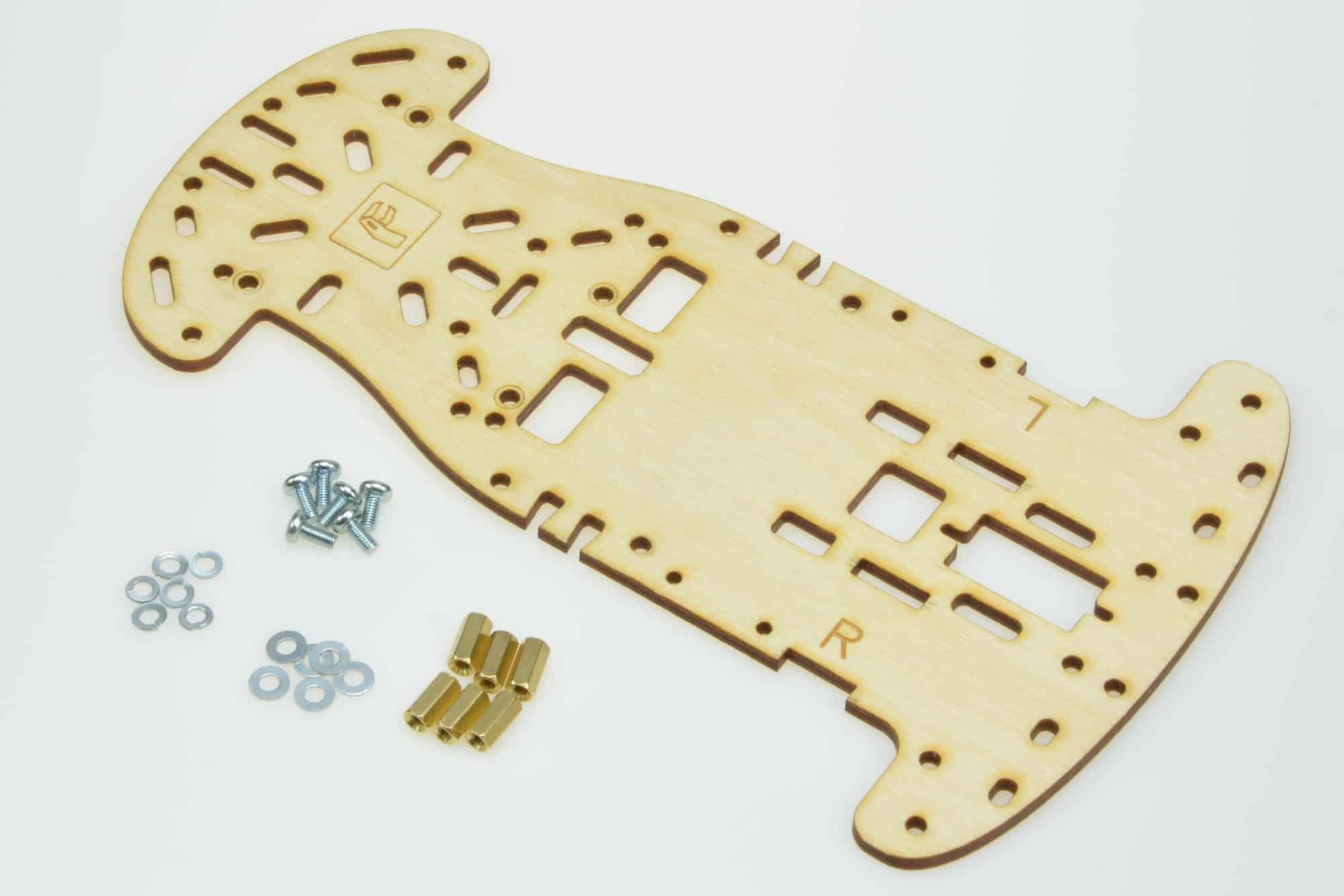
Na początku należy zamocować dystanse, do których docelowo zamontowane zostanie Arduino. Będą one również konieczne do przytrzymania na swoim miejscu koszyka z bateriami.
W tym celu potrzebujemy:
1x podwozie ze sklejki,
6x dystans 10 mm,
6x śrubka 6 mm,
6x podkładka M3,
6x podkładka sprężysta M3.
Elementy używane podczas kroku 1.
Gotowe zestawy do kursów Forbota
Komplet elementów Gwarancja pomocy Wysyłka w 24h
Części pozwalające wykonać ćwiczenia z kursu budowy robotów dostępne są w formie gotowych zestawów! W komplecie znajdują się elementy mechaniczne (w tym koła i silniki), baterie oraz shield!
Masz już zestaw? Zarejestruj go wykorzystując dołączony do niego kod. Szczegóły »
Podkładki sprężyste charakteryzują się nieregularnym kształtem, który zostaje wyrównany po ich mocnym ściśnięciu. Podkładki te sprawiają, że całość nie będzie się samoczynnie rozkręcać np. pod wpływem drgań.
Sposób wykorzystania podkładek sprężystych.
Na początku na każdą śrubkę należy nałożyć podkładkę sprężystą, a następnie zwykłą:
Kolejność nakładanych elementów.
Postępując zgodnie z powyższą ilustracją należy przygotować 6 śrubek z nałożonymi podkładkami:
Wstępne przygotowanie śrubek.
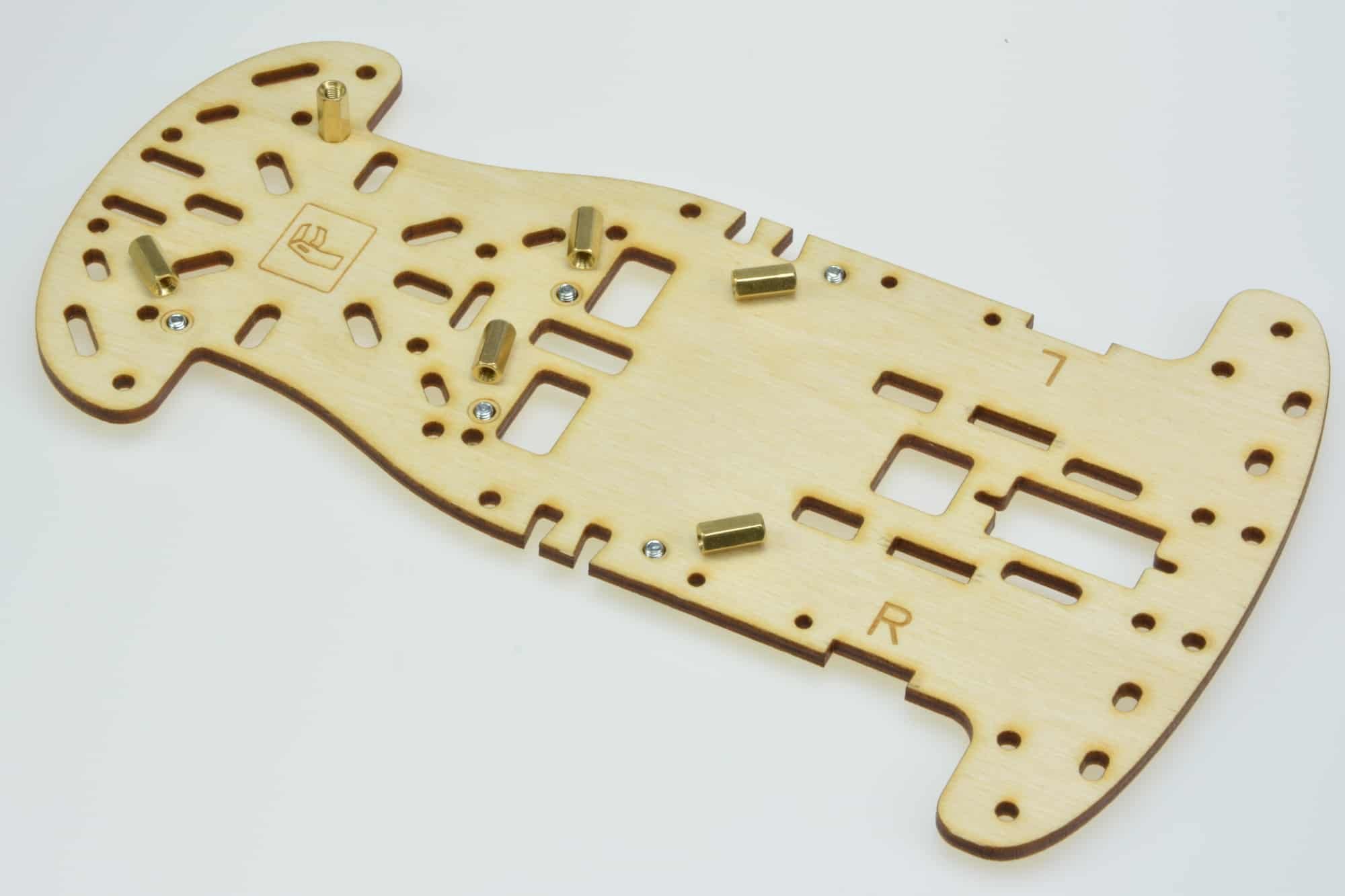
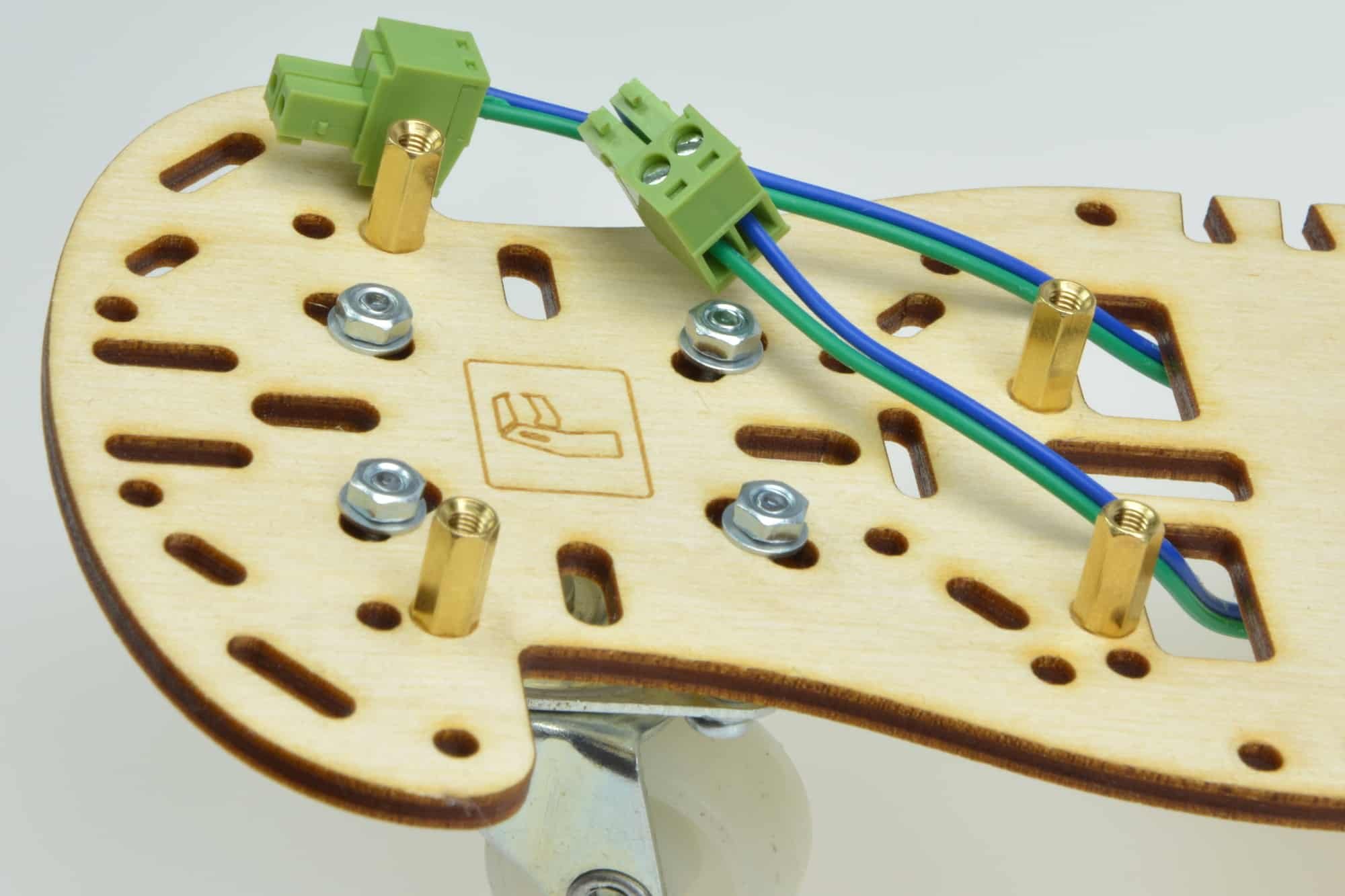
Następnie wkładamy je od spodu sklejki w odpowiednie otwory (widoczne na poniższym zdjęciu), a następnie od góry przykręcamy dystanse. W zupełności wystarczy tutaj dokręcić śrubki ręcznie, nie ma potrzeby robienia tego bardzo mocno za pomocą śrubokrętu.
Zwróć uwagę, aby dystanse znalazły się po stronie
z wygrawerowanym logotypem Forbota.
Śrubki przełożone przez odpowiednie otwory.
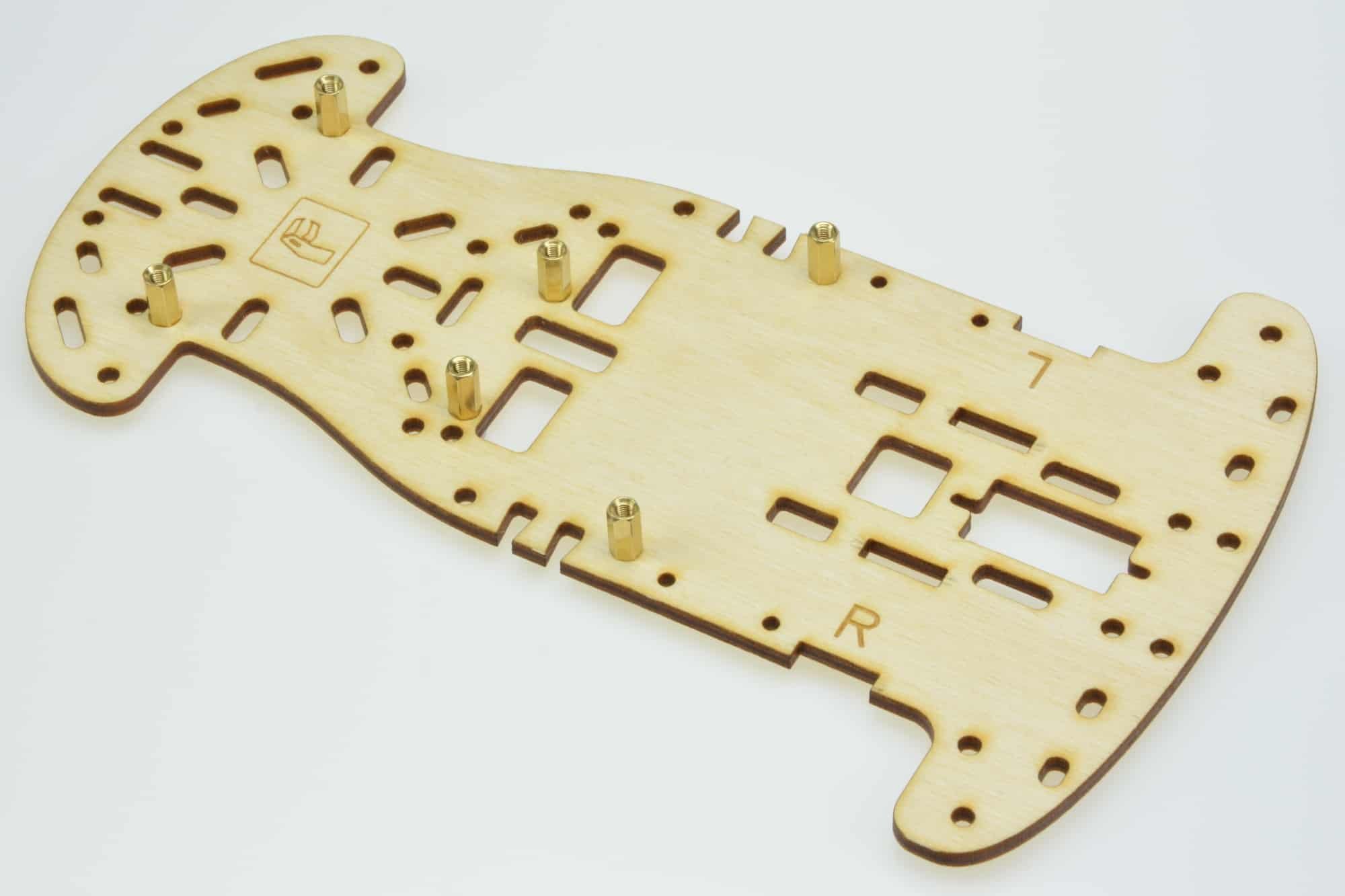
Przykręcone dystanse.
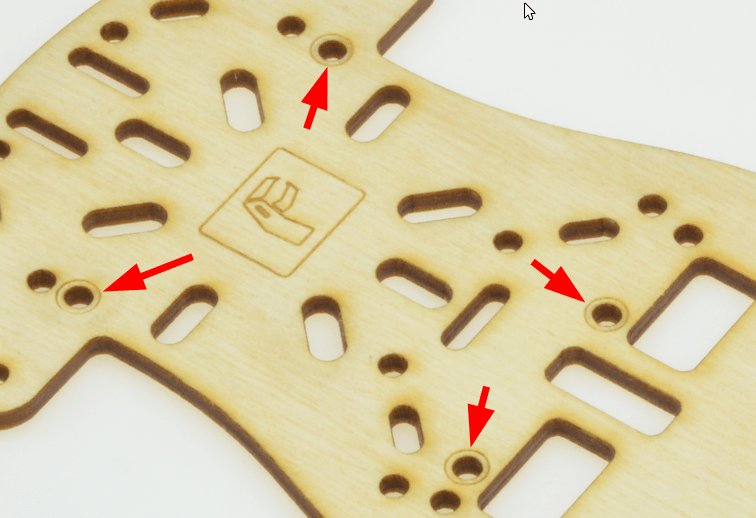
Dla łatwiejszej identyfikacji 4 miejsc pod dystanse, na których będzie się później opierało Arduino otwory te zostały dodatkowo zaznaczono grawerem.
Grawerowane oznaczenie otworów.
Krok 2: Montaż silników
Podczas tego etapu zamontujemy oba silniki. Ich wyprowadzenia są dość kruche. Warto obchodzić się z nimi delikatnie, aby nie ułamać przewodów. W takim wypadku konieczne będzie ich ponowne przylutowanie - wtedy może przydać się nasz kurs lutowania.
Zacznijmy od pierwszego silnika. W tym celu potrzebne będą:
1x silnik,
1x zielona wtyczka dla silnika (wyciągnięta z shielda),
2x mały element ze sklejki (zgodne z poniższym zdjęciem),
2x śrubka M3 o długości 30 mm,
2x nakrętka M3.
Przed rozpoczęciem montażu silnika należy na końcach jego przewodów założyć wtyczkę, która zostanie później wpięta w shield. Operację wykonujemy tak samo, jak w poprzedniej części kursu, gdy mocowaliśmy przewody od koszyka z bateriami.
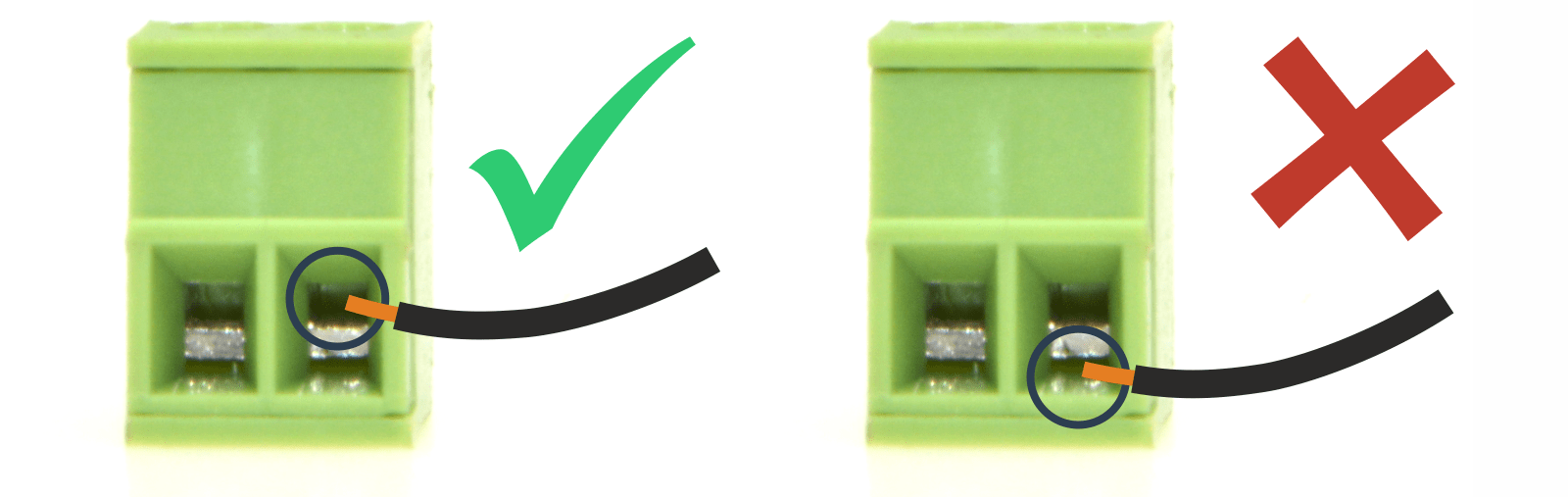
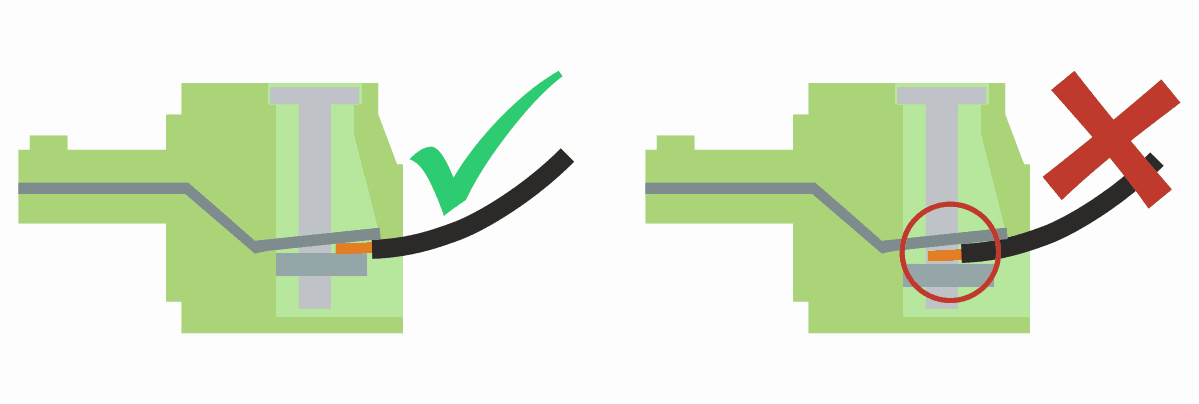
Trzeba pamiętać o umieszczeniu przewodu w odpowiednim miejscu wtyczki:
Poprawne umiejscowienie przewodu w złączu.
Uwaga! Do środka złącza należy włożyć jedynie odizolowaną część przewodu!
Do środka złącza wkładamy jedynie odizolowaną część przewodu.
Tym razem nie musimy się jednak przejmować kolejnością ułożenia przewodu we wtyczce. Można zrobić to dowolnie, w razie problemów całość poprawimy na etapie programowania robota.
Aby iść dalej potrzebny jest więc następujący zestaw elementów:
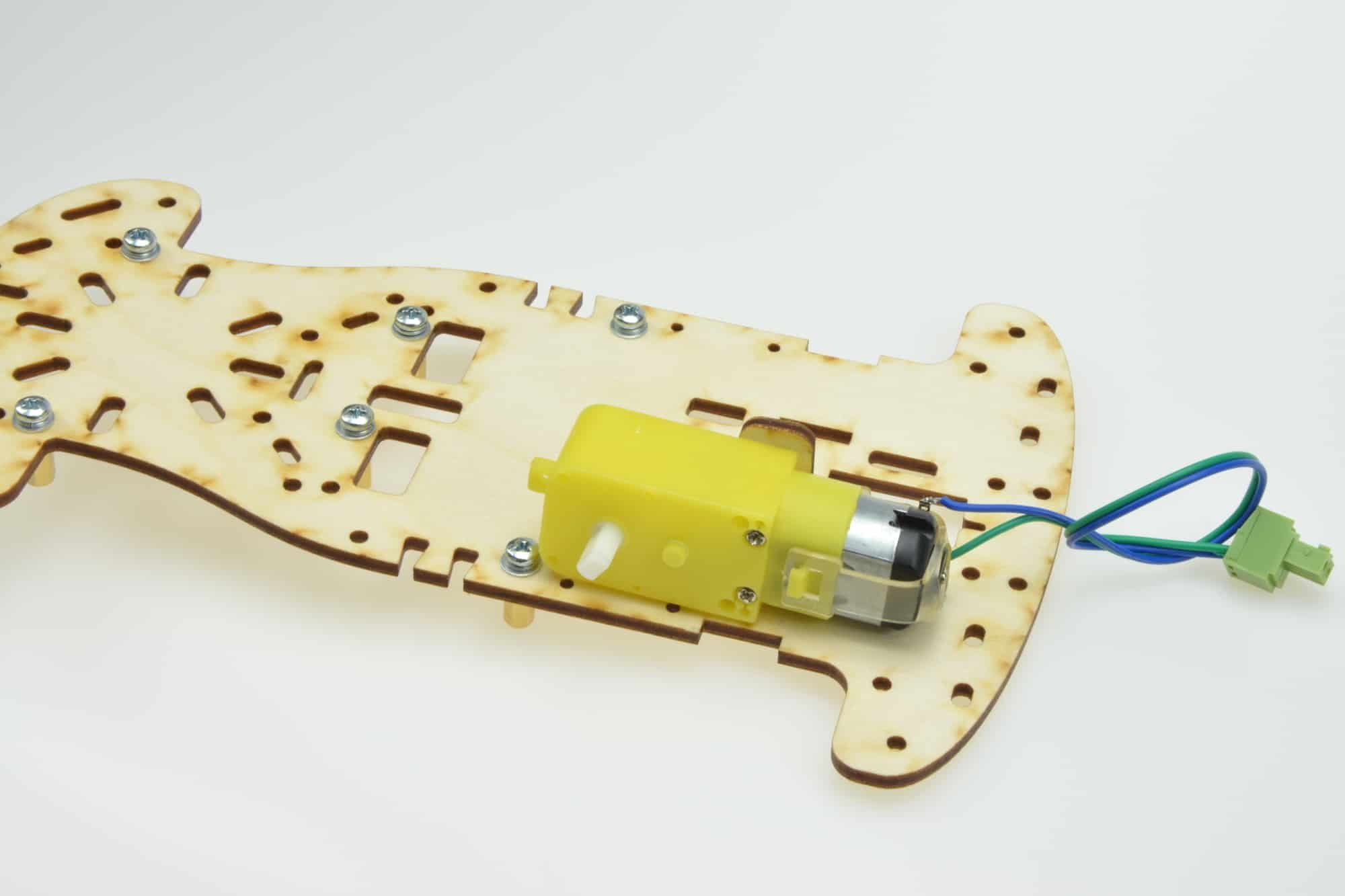
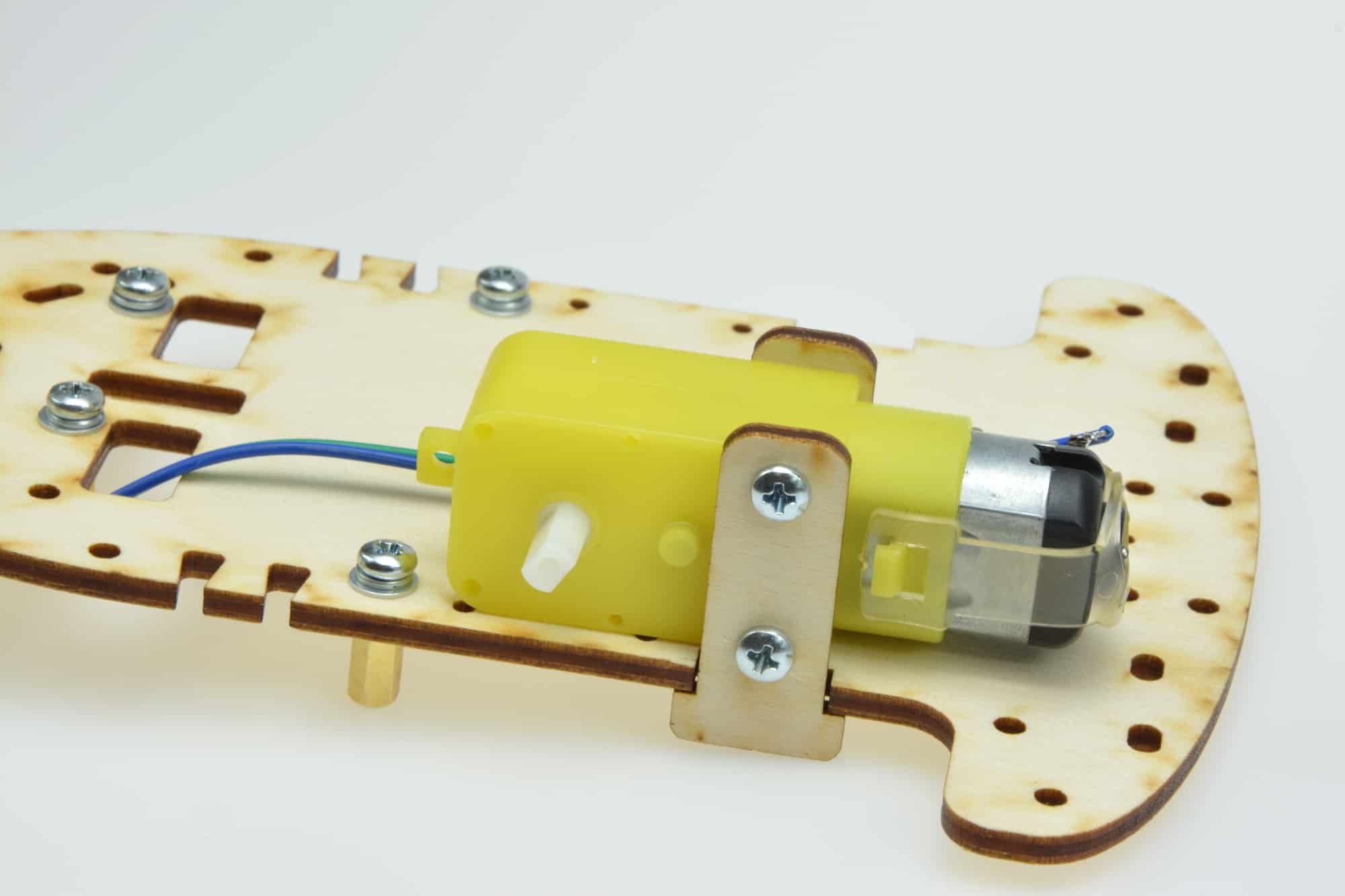
Montaż silnika polega na przełożeniu "grzybków" ze sklejki na drugą stronę płytki oraz skręcenie całości za pomocą dołączonych do zestawu długich śrub. Całość ilustrują poniższe zdjęcia.
Pierwszy element ze sklejki.
Przyłożenie silnika.
Drugi element ze sklejki.
Skręcone mocowanie.
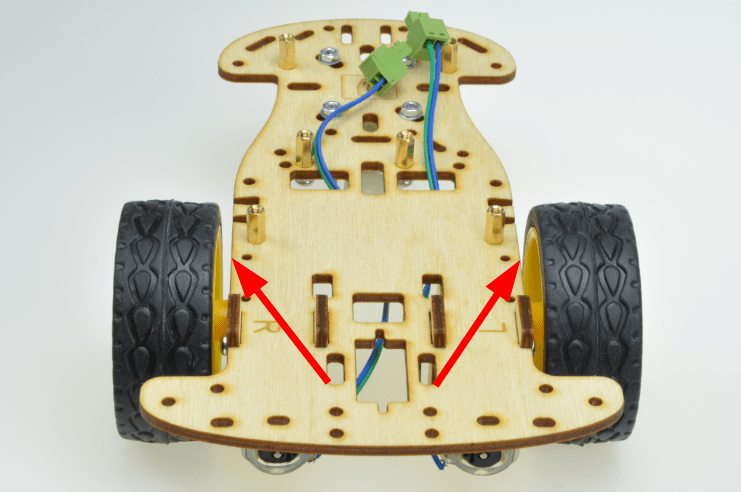
Zwróć uwagę, że silniki muszą znaleźć się po przeciwnej stronie,
niż wcześniej zamontowane dystanse.
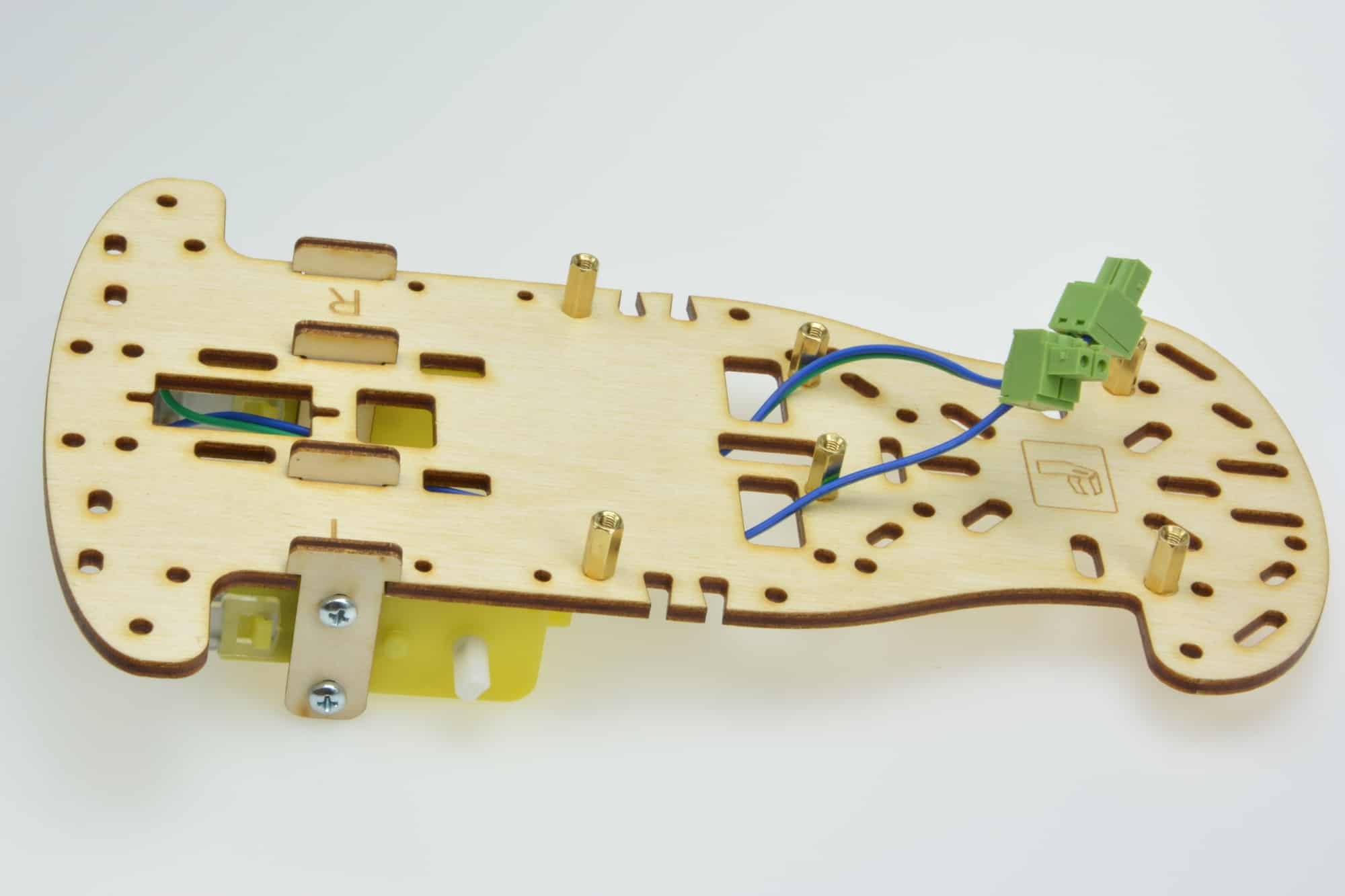
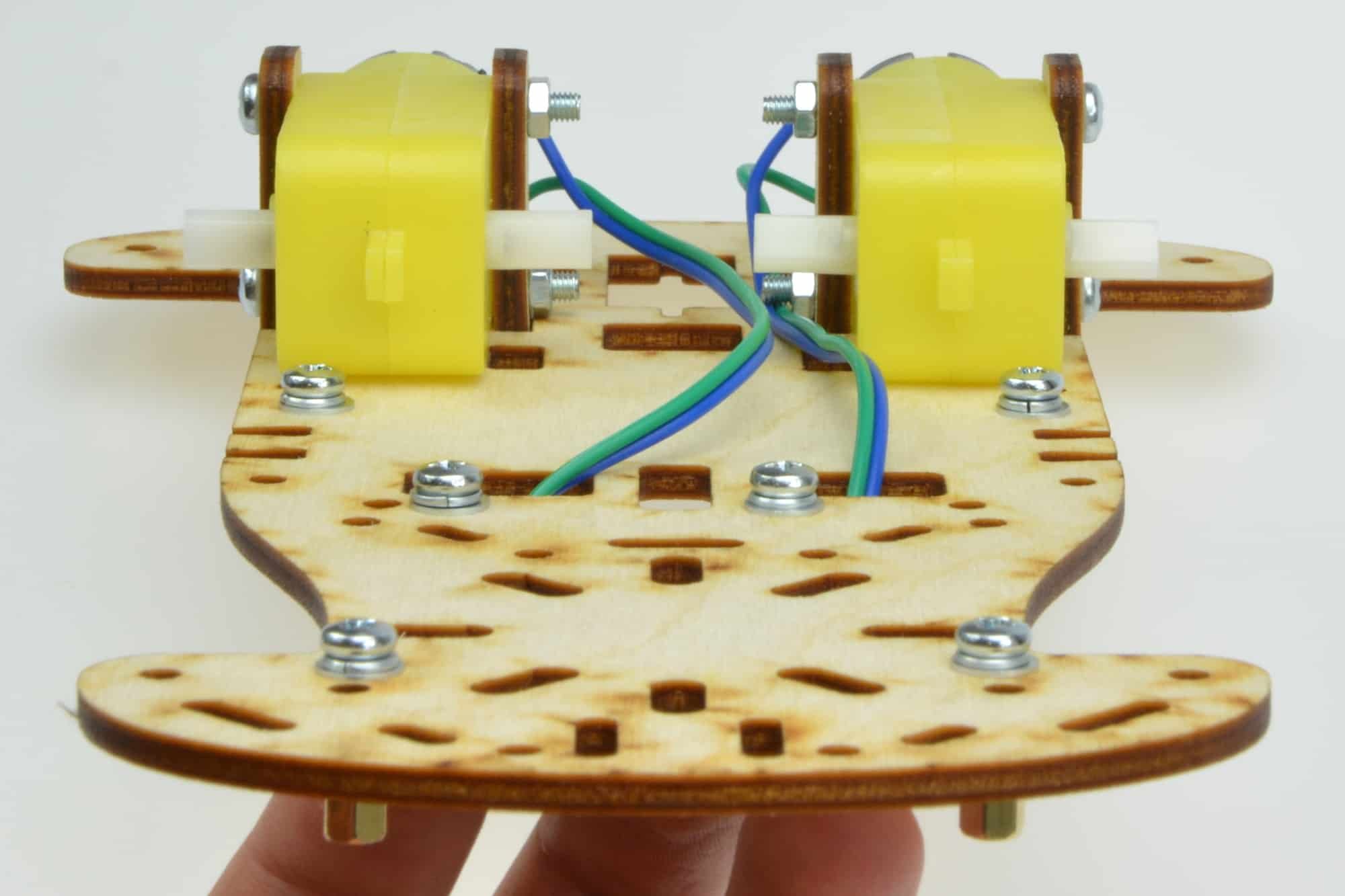
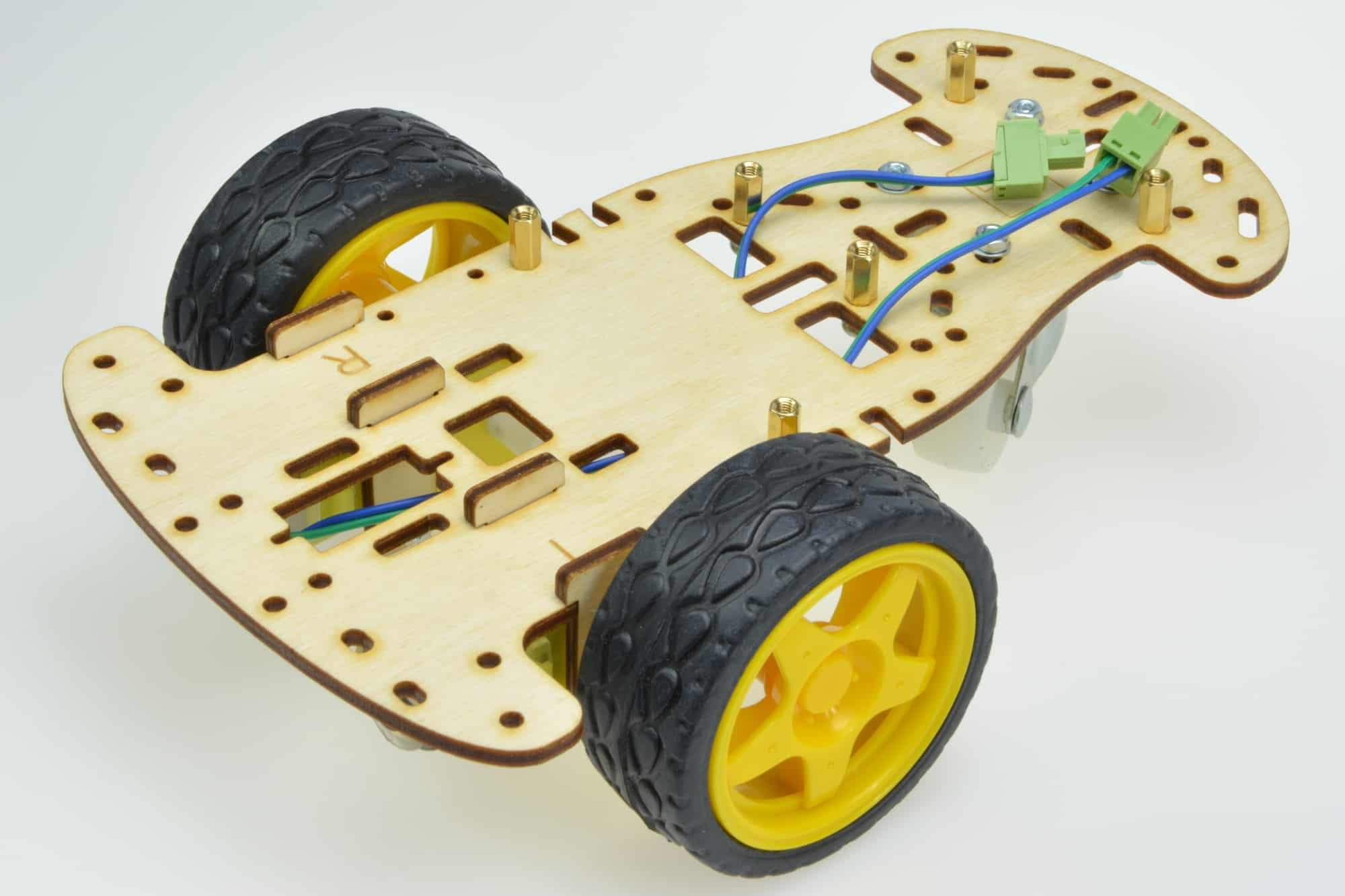
Operację powtarzamy analogicznie dla drugiego silnika. Ostatecznie po tym etapie całość powinna wyglądać następująco:
Zamontowane silniki – widok od góry.
Zamontowane silniki – widok od dołu.
Krok 3: Przygotowanie trzeciego punktu podparcia
Nasz robot za każdym razem będzie podpierał się na 3 punktach. Dwa z nich to gumowe koła, które przymocowane będą do silników. Trzeci punkt, który zapewni nam równowagę, to swobodne koło, które będzie mogło obracać się w dowolnym kierunku - mechanizm znany z wózków sklepowych.
Tym razem potrzebne będą:
1x koło swobodne,
8x podkładka zwykła,
4x podkładka sprężysta,
4x śrubka M3 o długości 20 mm,
4x dystans M3 o długości 10 mm.
Elementy potrzebne podczas tego kroku.
Na każdym narożniku podstawy koła swobodnego należy wykonać połączenie składające się kolejno z: śrubki, podkładki sprężystej, podkładki zwykłej, podstawy koła, podkładki zwykłej oraz dystansu. Cała kolejność widoczna jest na poniższym zdjęciu:
Kolejność elementów podczas tego kroku.
W efekcie powinniśmy uzyskać koło z następującymi mocowaniami:
Pojedyncze mocowanie.
Koło gotowe do dalszego montażu.
Krok 4: Postawienie robota "na kołach"
Podczas tego etapu połączymy przygotowane modułu, aby ustawić całego robota już na kołach. Na początek warto przykręcić koło swobodne. W tym celu konieczne będą:
1x przygotowane wcześniej koło swobodne z 4 mocowaniami,
8x podkładka M3,
4x nakrętka M3.
Na przygotowane wcześniej koło swobodne nakładamy 4 podkładki:
Dodanie brakujących podkładek.
Następnie całość wkładamy (od spodu) w podłużne otwory rozłożone promieniście dookoła logo Forbota. W zależności od konkretnego modelu koła może ono pasować w różne otwory. Na pewno jednak wszystkie 4 śrubki powinny przejść na drugą stronę sklejki.
Na tak przełożone śrubki nakładamy kolejne podkładki, a całość skręcamy nakrętkami:
Dodatkowe podkładki.
Skręcenie całości nakrętkami.
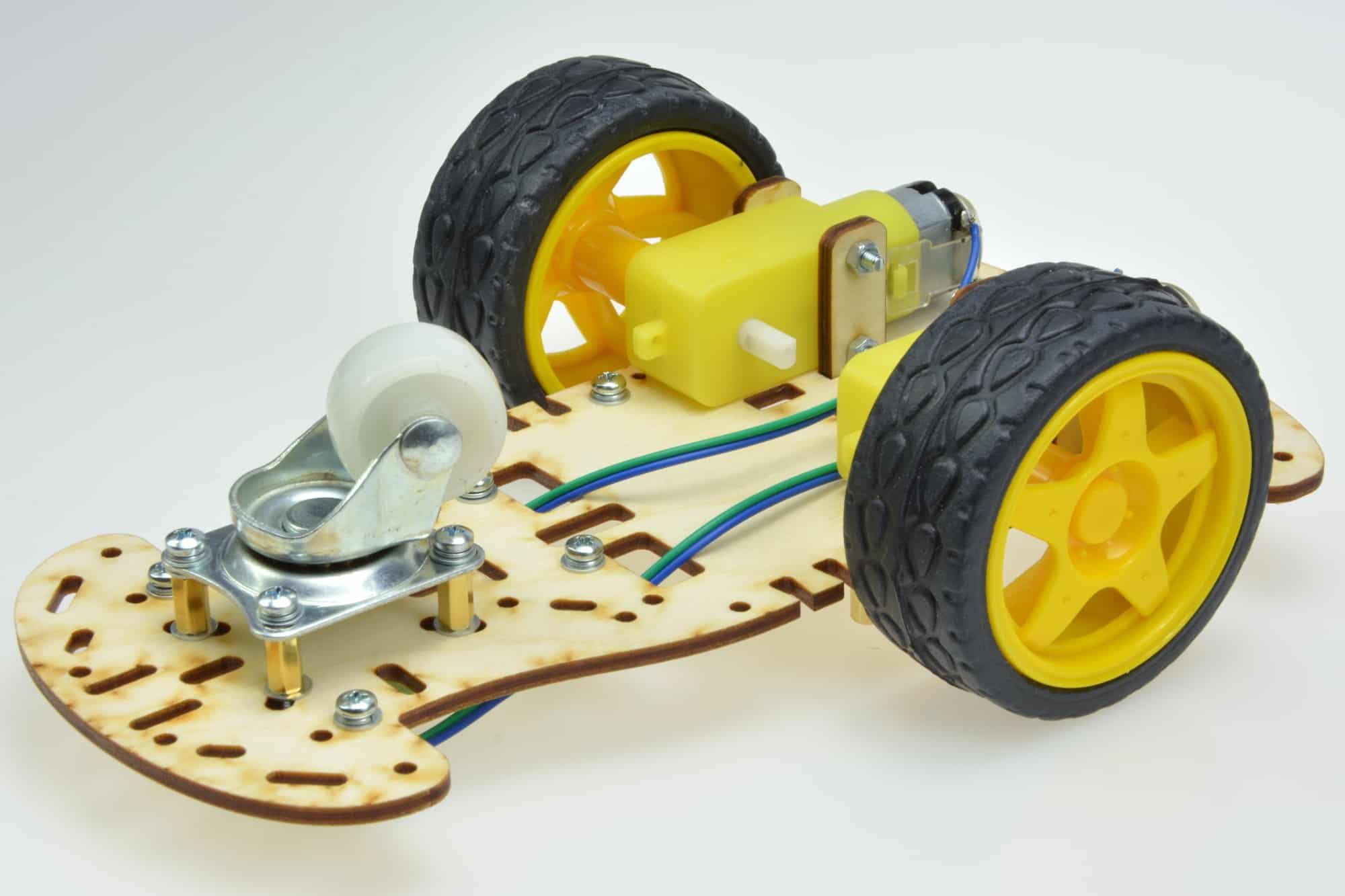
Następny etap, to wciśnięcie na osie silników kół, co nie wymaga dużej siły. Po tej operacji całość powinna prezentować się następująco:
Robot postawiony na kołach.
Kół nie należy dociskać do końca osi silników! Konieczne jest pozostawienie
małego odstępu, aby koła nie tarły o ramę ze sklejki!
Odstępy między kołami i sklejką.
Widok na całą konstrukcję od spodu:
Widok robota od dołu.
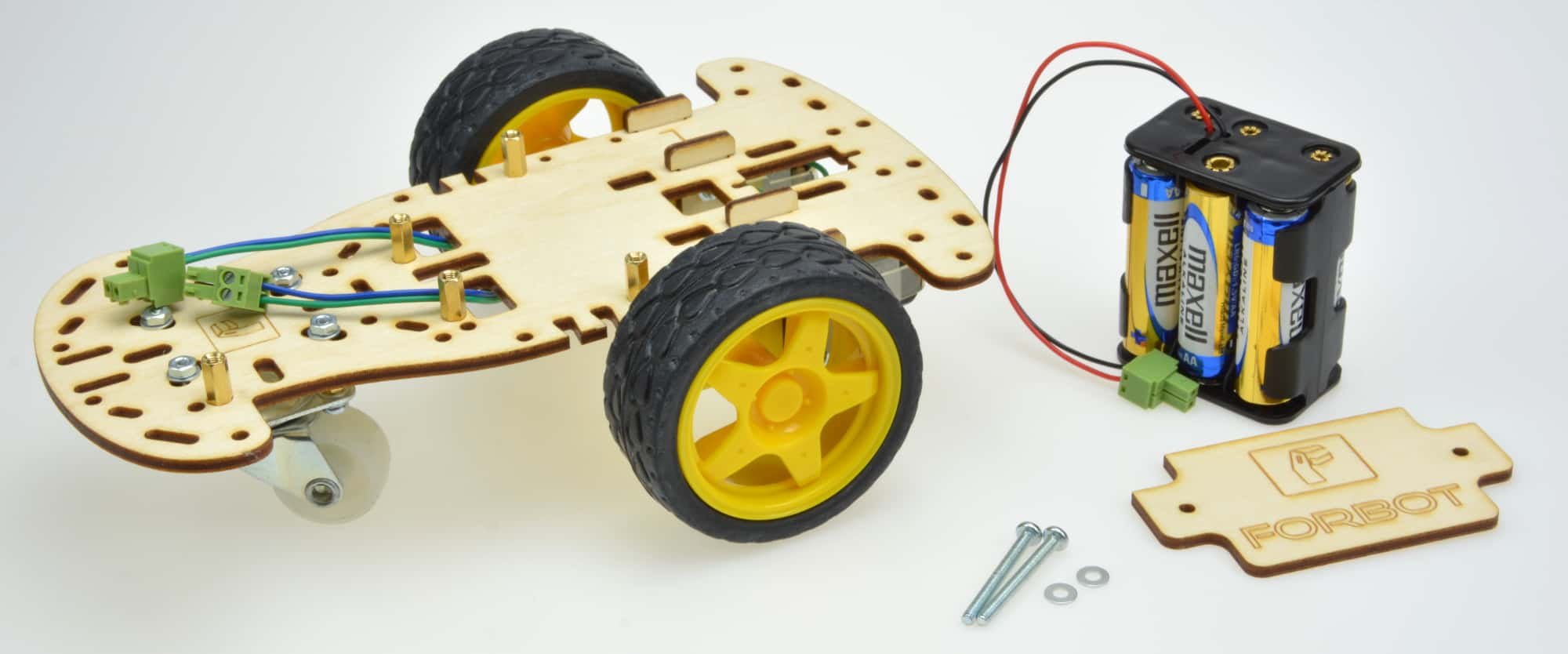
Krok 5: Zamocowanie baterii
Przedostatni krok, to montaż koszyka z bateriami, potrzebne elementy:
1x koszyk z 6 bateriami AA,
1x element ze sklejki z logo Forbota,
2x śrubka M3 o długości 30 mm,
2x podkładka M3 zwykła.
Elementy potrzebne podczas tego kroku.
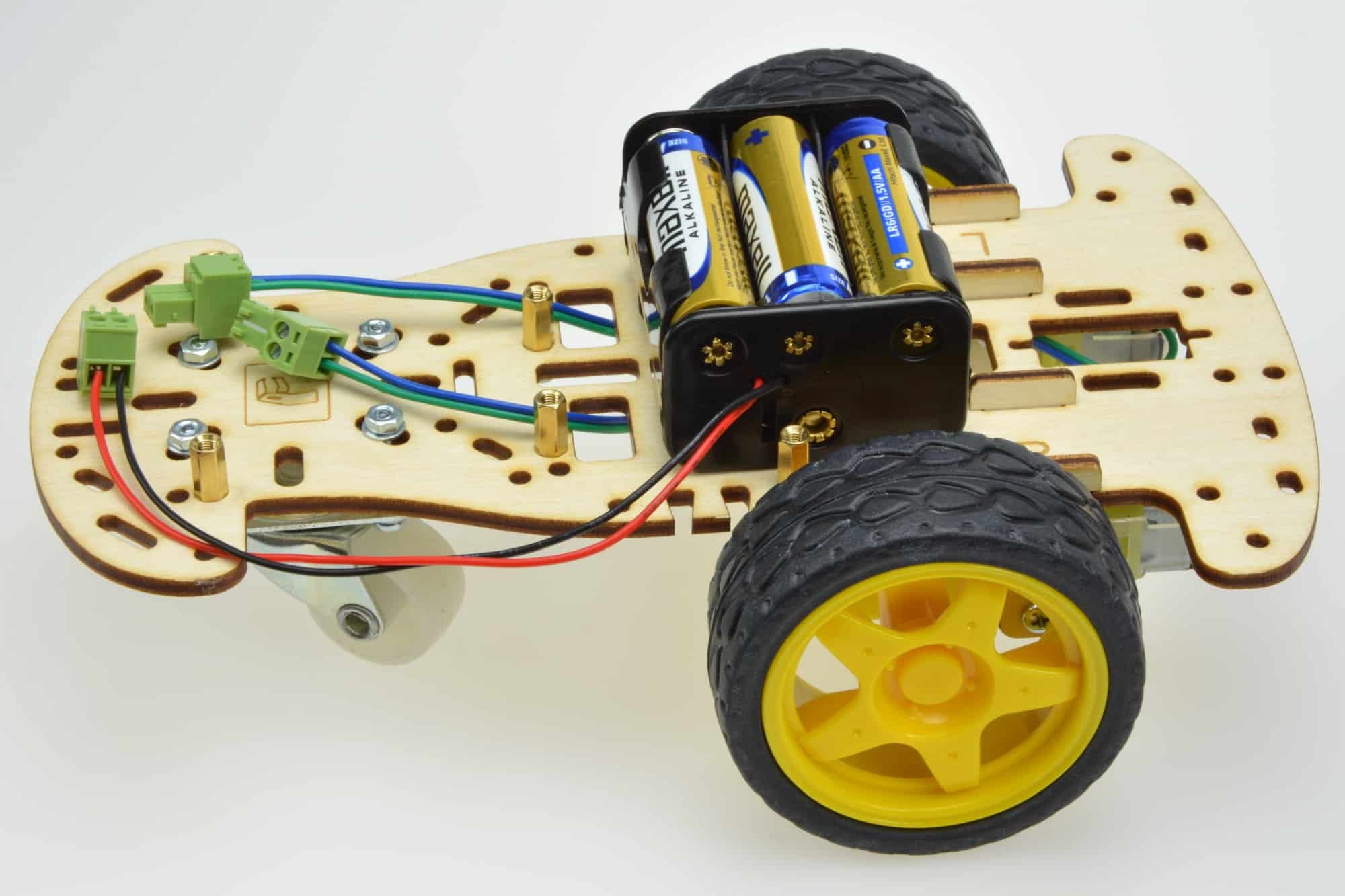
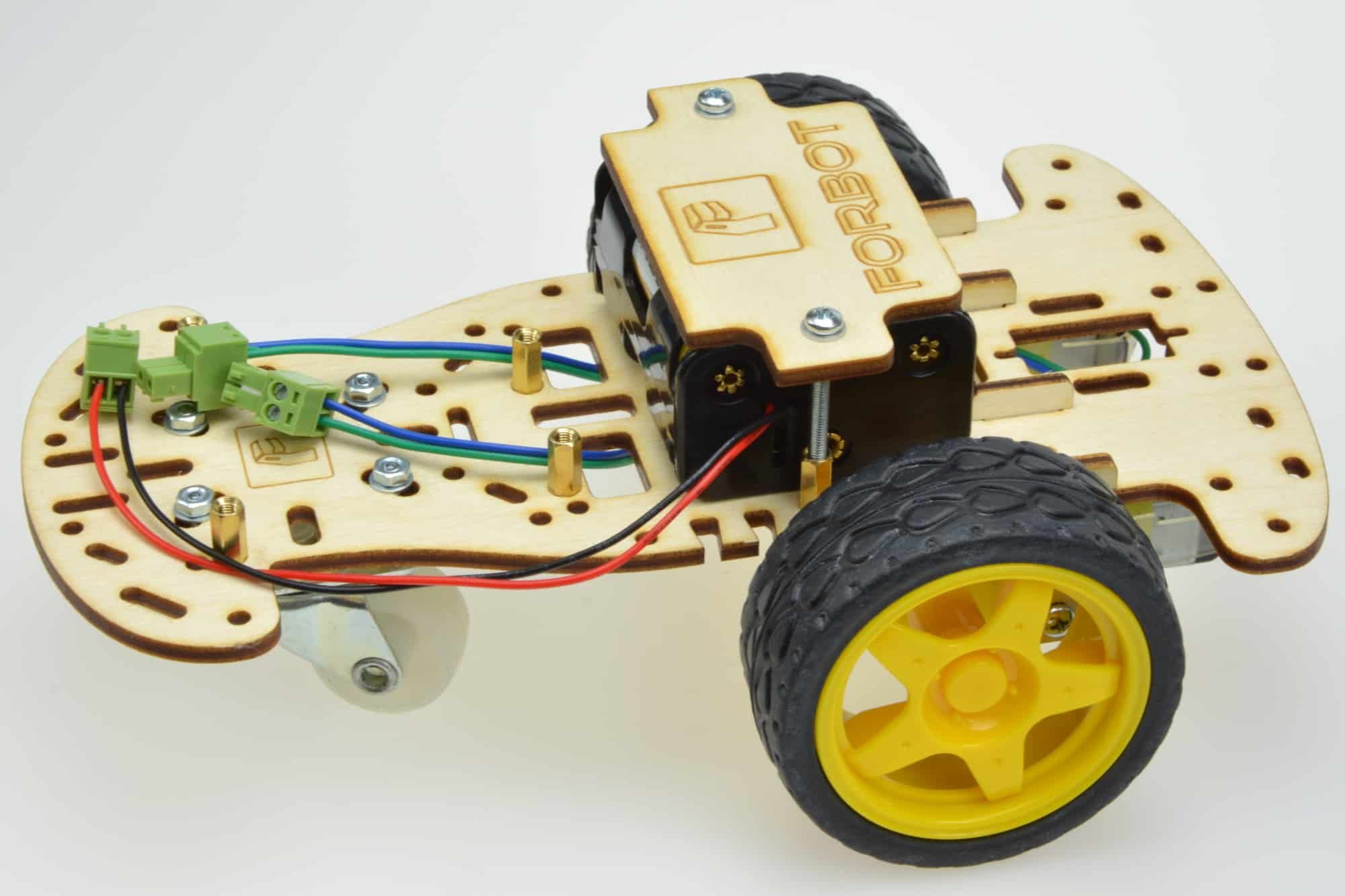
Koszyk z bateriami należy położyć na robocie przewodami w stronę logo Forbota, a następnie od góry przykręcić dodatkowy fragment sklejki. Uwaga! Przykręcamy go delikatnie, tak, aby koszyk z bateriami nie był luźny. Nie ma jednak potrzeby, aby mocno go ściągać.
Śrubki mocujące powinny wejść w dystanse,
które były mocowane już podczas 1 kroku tej instrukcji.
Umieszczenie baterii.
Zamocowania koszyka.
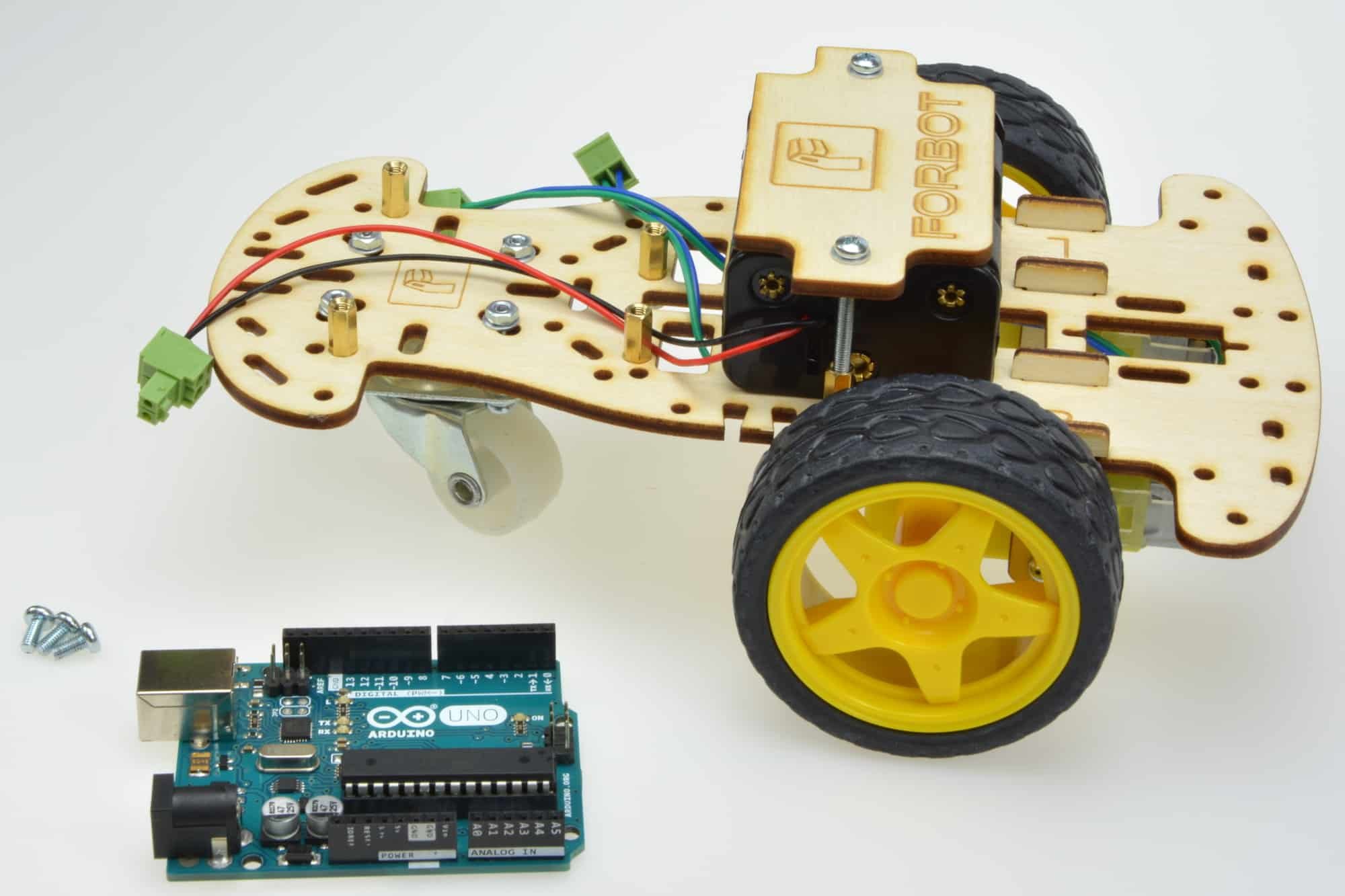
Krok 7: Montaż Arduino
Ostatni krok składania części mechanicznej, to montaż Arduino oraz naszego shielda. W tym celu potrzebne będą:
1x Arduino,
3x śrubka M3 o długości 6 mm.
Elementy potrzebne podczas tego kroku.
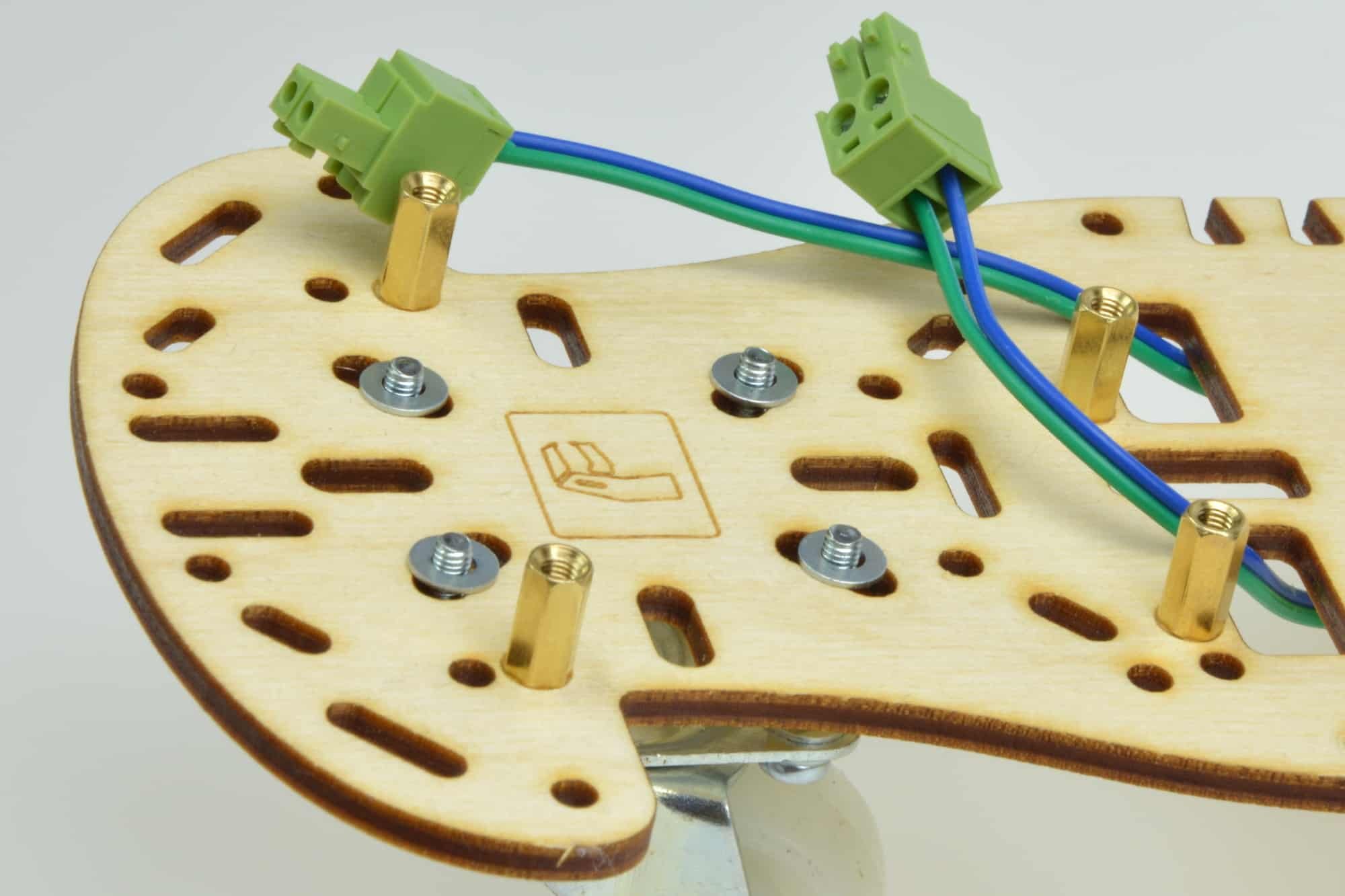
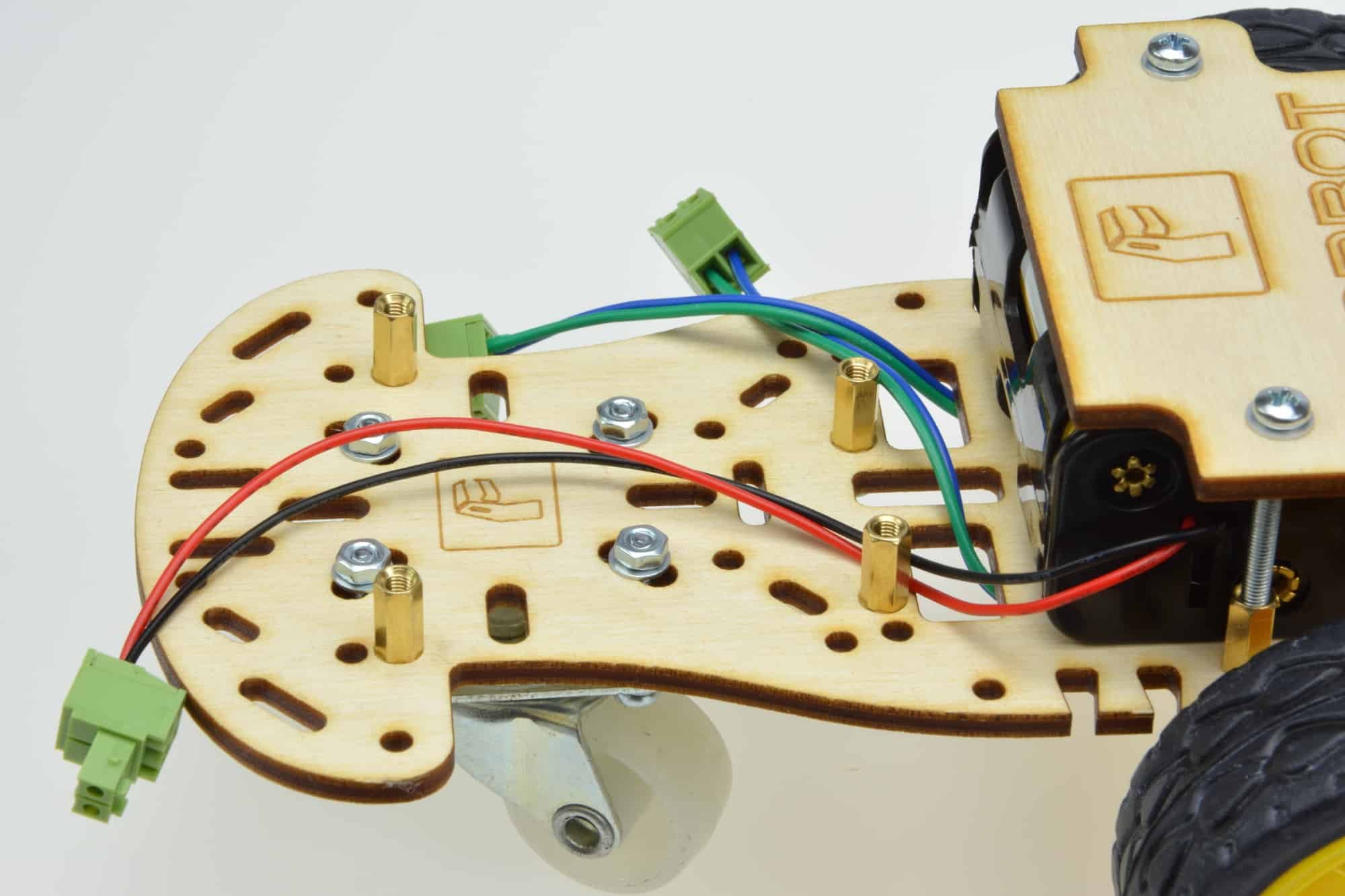
Ważne jest odpowiednie umiejscowienie przewodów, te od zasilania powinny znaleźć się pod naszą płytką Arduino. Natomiast pozostałe (od silników) chwilowo można odłożyć na bok.
Odpowiednie ułożenie przewodów.
Przykręcone Arduino.
Arduino przykręcamy jedynie na 3 śrubki - nie wykorzystujemy otworu obok złącza USB. Niestety projektanci tej płytki przewidzieli tam bardzo mało miejsca na śrubkę, dlatego najwygodniej będzie pominąć ten otwór. Wystarczy, że Arduino będzie się opierać w tym miejscu na dystansie.
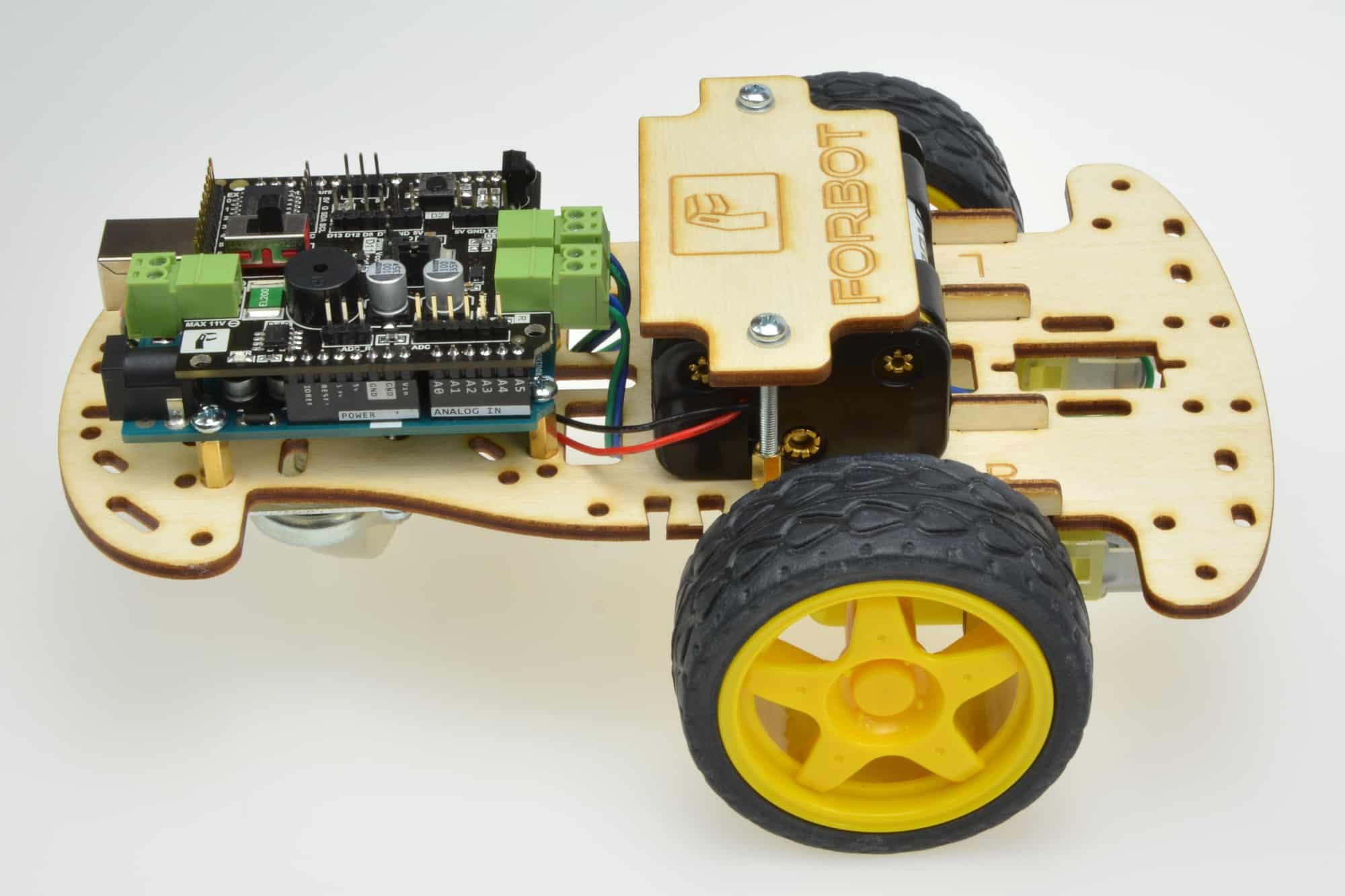
Na koniec pozostaje wykorzystać nasz shield i podłączyć do niego przewody:
Krok 8: Gotowe!
Najważniejsza część mechaniki naszego robota jest już gotowa. Podczas kolejnych artykułów będziemy ją jeszcze rozbudowywać poprzez dodawanie odpowiednich czujników. Na ten moment cała konstrukcja powinna wyglądać następująco:
Gotowa część mechaniczna robota!
Podsumowanie
W kolejnej części kursu budowy robotów zajmiemy się napisaniem pierwszego programu, który ożywi robota. Na początku bez czujników - zajmiemy się jazdą po zaprogramowanej "na sztywno" trasie. Będzie to wprowadzenie do rozwijania bardziej zaawansowanych algorytmów.
Co o tym sądzisz? Oceń ten wpis:
Średnia ocena 4.8 / 5. Głosów łącznie: 121
Nikt jeszcze nie głosował, bądź pierwszy!
Artykuł nie był pomocny? Jak możemy go poprawić? Wpisz swoje sugestie poniżej. Jeśli masz pytanie to zadaj je w komentarzu - ten formularz jest anonimowy, nie będziemy mogli Ci odpowiedzieć!
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.



































Trwa ładowanie komentarzy...