Kursy • Poradniki • Inspirujące DIY • Forum





Wpisy z kategorii: Programowanie, strona 5
Programowanie pod Linuxem, zdalne przesyłanie programu
W poprzednich częściach opisałem jak można wykorzystać płytę netbooka do zainstalowania na niej Linuxa. Teraz czas napisać i uruchomić własny program.
Najpierw małe słowa wyjaśnienie. Nie będziemy instalować gcc, czyli naszego kompilatora na płytce docelowej!
Konwersja zmiennych integer na char/byte
Często zdarza się, że przez problemy z prostymi czynnościami nasze projekty zatrzymują się w miejscu na bardzo długo.
W moim przypadku dzieje się tak zazwyczaj na etapie programowania mikrokontrolera. Dlatego postanowiłem rozpocząć serię krótkich wpisów z opisami częstych problemów początkujących.
Sterowanie robotem mobilnym klasy (2,0)
Problem sterowania robota wyposażonego w dwukołowy napęd różnicowy, nazywanego też robotem mobilnym klasy (2,0), prawdopodobnie dosięgnie z czasem większość osób zajmujących się robotyką amatorską.
Do tej klasy robotów zalicza się bowiem dużą cześć tworzonych konstrukcji: linefollowery, micromouse i wszelkiej wielkości sumo.
Podstawy mikrokontrolerów PIC. Bity konfiguracyjne.
Projektowanie elektroniki wymaga nie lada umiejętności przewidywania problemów na różnych stadiach rozwoju urządzenia. Bardzo ważną kwestią jest sposób oprogramowania mikrokontrolera i sprzęgniętych z nim modułów.
W tym artykule zajmiemy się wybranymi bitami konfiguracji w układach PIC firmy Microchip.
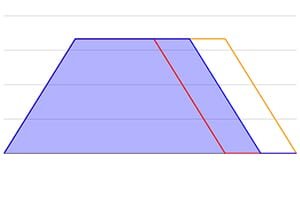
Filtr Alfa – Beta od teorii do praktyki – #2
W poprzednim artykule przedstawiłem teorię dotyczącą filtrów alfa-beta. Wykonałem również symulacje w Matlabie demonstrujące wpływ nastaw na zachowanie filtru. Teraz przyszła pora na implementację filtru na mikrokontrolerze.
W projekcie wykorzystałem płytkę STM32F4 Discovery i moduł MiniIMU v2 od Pololu.
Filtr Alfa – Beta od teorii do praktyki – #1
Zadaniem czujników jest dostarczanie informacji o położeniu robota oraz innych obiektów.
Dane te są przekazywane do algorytmów sterowania. Sygnały z czujników obarczone są błędem. Aby uzyskać dokładniejsze informacje na temat stanu obiektu należy dokonać jego estymacji na podstawie danych pomiarowych.
Systemy kontroli wersji – Mercurial
Pracowałeś nad większym projektem i bałeś się przystępować do większych zmian w kodzie?
Zaśmiecałeś dysk folderami typu projekt1, projekt2. Wykomentowywałeś duże bloki kodu, żeby dało się je szybko przywrócić jeśli coś przestanie działać? Czas na wprowadzenie systemu kontroli wersji Mercurial!
Jak unikać pułapek języka C?
Dobry programista powinien wiedzieć jakie aspekty języka są niebezpieczne i umiejętnie sobie z nimi radzić.
W artykule przybliżę kilka niebezpiecznych sytuacji. Niektóre będą oczywiste, albo wręcz śmieszne, inne mogą dotyczyć aspektów z których wiele osób nie zdaje sobie spawy.
Sekrety profesjonalnego programowania

Niniejszy artykuł różni się od większości materiałów dotyczących programowania z którymi mogliście mieć styczność.
Nie wyniesiecie z niego żadnej wiedzy dotyczącej konkretnego procesora czy modułu. Co więcej, kodu będzie tutaj bardzo mało, omówione zostaną tylko techniki jego tworzenia.

Dołącz do 20 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.




