Nie wiesz jak zacząć budowę pierwszego robota? Zacznij od naszego kursu składania światłoluba.
Jest to najprostszy robot, którego zadaniem jest podążanie w stronę źródła najsilniejszego światła. W praktyce zbudujesz pojazd, którym będziesz mógł sterować za pomoc zwyczajnej latarki!
Ze względu na spore problemy początkujących związane z budową tzw. "Waldemara Światłoluba", postanowiłem zaktualizować informacje ze starego artykułu (znajdującego się pod tym samym adresem), poprawić błędy w nim zawarte, wzbogacić treść o większą liczbą zdjęć i schematów. Dodatkowo zamieściłem FAQ obejmujące najczęściej pojawiające się pytania.
Do wszystkich czytających mam dużą prośbę - zanim napiszecie post z opisem problemu, jeszcze raz starannie przeanalizujcie ten tekst. Na 90%, odpowiedź na dany problem została już udzielona w samym artykule lub na forum, dlatego pamiętaj, aby używać wyszukiwarkę.
Przypominam również, że nie jest to artykuł o podstawach elektroniki! W przypadku pytań, proszę skierować uwagę na nasz darmowy kurs elektroniki!
Życzę miłej lektury, Damian Nowak (Nawyk)
Zaczynamy
Celem artykułu jest łagodne wprowadzenie w świat robotyki. Nawet najobszerniejsza wiedza teoretyczna nie wystarczy do budowy zaawansowanych robotów, jeśli nie zdobędziemy chociaż minimum doświadczenia i nie poznamy czysto praktycznych problemów (często pomijanych w najróżniejszych lekturach).
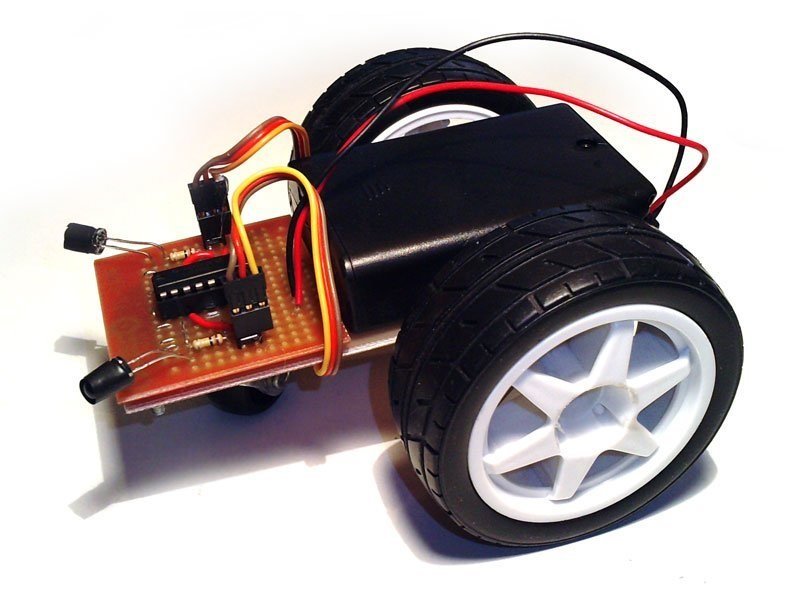
Aby zdobyć owo doświadczenie, zbudujemy naszego pierwszego robota! Jego zadaniem będzie podążanie w kierunku źródła światła (np. latarki w zaciemnionym pokoju), a do budowy wykorzystamy garść podzespołów. Od razu uspokajam - Waldemara Światłoluba nie trzeba programować, prawidłowo złożony i zasilony powinien zadziałać natychmiast po uruchomieniu.
Narzędzia
Aby zacząć budować roboty, musimy zaopatrzyć się w najpotrzebniejsze narzędzia. Bez nich nawet nie mamy co marzyć o karierze robotyka!
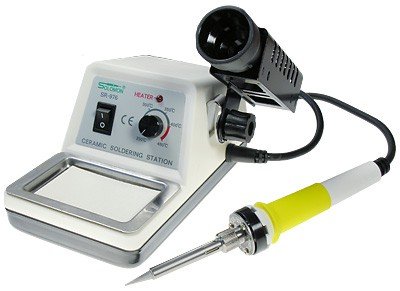
Lutownica - dla elektronika jest tym, czym piec dla piekarza. Kwestia wyboru lutownicy była wielokrotnie poruszana na forum: tutaj, tutaj, tutaj, tutaj, czy chociażby tutaj.
Podsumowując - odradzam lutownice transformatorowe, zdecydowanym "faworytem" są lutownice kolbowe. Na początek w zupełności wystarczą tanie kolbówki, jeśli natomiast planujecie iść dalej w kierunku robotyki/elektroniki, kupcie stację lutowniczą.
Więcej o wyborze sprzętu i samym lutowaniu
znajdziecie w osobnym kursie lutowania.
Lutownica transformatorowa.
Lutownica kolbowa.
Stacja lutownicza.
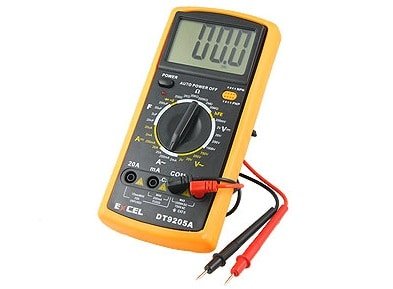
Multimetr - nawet nie próbujcie rozwiązywać problemów bez tego przyrządu. Przydaje się zawsze, gdy trzeba zmierzyć spadek napięcia na wybranym podzespole, rezystancję bliżej nieokreślonego opornika, szukać zwarć albo poznać np. maksymalny prąd pobierany przez silniki.
Na początek w zupełności wystarczy tania chińszczyzna (ok. 20zł), nie będzie też takiego miernika szkoda, jeśli w trakcie opanowywania podstaw pomiarów go uszkodzicie.
Przykładowy multimetr
Cyna - nie należy tej sprawy bagatelizować. Obecnie standardem są ołowiowe spoiwa lutownicze z rdzeniem zawierającym topnik, dlatego wystrzegam przed kombinowaniem i próbą "oszczędzania". Sama cyna nie wystarczy, ręczne "doprawianie" jej kalafonią na dłuższą metę nie ma sensu. Polecam firmę Cynel. Jaka średnica drutu? Na początek wystarczy fi=1mm (koszt ok. 2zł za fiolkę), chociaż cieńszą łatwiej się lutuje drobne, gęsto rozmieszczone elementy.
Fiolka cyny.
Odsysacz do cyny - ważna sprawa, jeśli bierzemy pod uwagę możliwość popełnienia błędu i chęć korekty (a to prędzej czy później każdemu się przytrafi). Do pierwszych prób polecam najtańszy.
Ja korzystam od kilku lat z popularnego OD-25 i regularnie czyszczony/smarowany spisuje się znakomicie. Odsysacza używa się w bardzo prosty sposób - naciągamy tłok, grzejemy niechciane łączenie lutownicą, aż spoiwo osiągnie postać płynną, a następnie przykładamy do spoiwa odsysacz i naciskamy guzik (pojawia się podciśnienie, które zasysa spoiwo do środka urządzenia).
Przykładowy odsysacz do cyny.
Cążki boczne - do odcinania końcówek przylutowanych elementów. W większości przypadków (małe średnice wyprowadzeń) można je zastąpić porządnymi nożyczkami.
Hotglue - pistolet klejowy z wkładami uniwersalnymi - idealny do łączenia przeróżnych elementów "na szybko". Wkład uniwersalny trzyma się niemal każdego materiału, może służyć jako wypełnienie (klejone powierzchnie nie muszą do siebie przylegać) oraz bardzo szybko wiąże (proces można przyspieszyć schładzając naniesiony klej np. zimnym nadmuchem z suszarki).
Pistolet klejowy.
Układ napędowy - silniki oraz koła
Kwestia wyboru i konstruowania napędu jest chyba najważniejszą i najbardziej czasochłonną częścią budowy tego robota. Należy wiedzieć, że same silniki nie wystarczą! Potrzebna nam jest przekładnia mechaniczna, która zredukuje obroty na korzyść momentu obrotowego. Bez zastosowania przekładni, w najlepszym wypadku, robot zacznie się bardzo wolno rozpędzać do bardzo dużych prędkości. Przy czym najczęściej w ogóle nie ruszy z miejsca (koła będą się obracać tylko, kiedy będziemy trzymać go w powietrzu).
Pomysłów na rozwiązanie tego problemu jest bardzo dużo - polecam przejrzenie działu "konstrukcje początkujących", można tam znaleźć ciekawe, niskobudżetowe inspiracje. Należy zwrócić szczególną uwagę na maksymalny prąd pobierany przez silniki przy zasilaniu ok. 5V - jeśli jest większy niż 600mA, to istnieje szansa na spalenie układu L293D, który będziemy używać.
Gorąco polecam jednak zakup dwóch serw modelarskich. Dobrym wyborem są mikroserwa HXT900 (hextronic), bardzo popularne na Allegro. Kosztują ok. 15zł/sztukę. Inna możliwość to zakup silników ze zintegrowaną przekładnią w różnych sklepach (sprawdź katalog firm). Zawsze warto rozglądać się również na Allegro pod hasłem "silnik DC z przekładnią" itp.
Mikroserwo z akcesoriami
Kupienie serw to nie wszystko - należy je nieco przerobić. W innym artykule bardzo szczegółowo opisałem jak tego dokonać: Serwa modelarskie w robotyce amatorskiej - Kompendium. Interesuje nas punkt II.1 ("Zdejmowanie blokady i obsługa jako zwykły silnik DC z przekładnią"), podpunkt "Przerabianie mikroserw".
Kwestię wyboru kół pozostawiam Waszej pomysłowości. Jeśli chodzi o sposób poruszania się robota, to będzie podobny, jak w czołgu (coś w rodzaju napędu różnicowego). Potrzebujemy koło podporowe, aby robot się nie przewracał - zachęcam do wyprawy do sklepu np. Leroy Merlin i odwiedzenia działu meblowego. Można tam dostać za ok. 2-3zł kółka/kulki podobne, jak te zaprezentowane na poniższych zdjęciach.
Koło obrotowe.
Podpora
Potrzebne podzespoły elektroniczne
Płytka uniwersalna PDU-21
Układ L293D lub L293DNE - należy zwrócić uwagę na literkę "D" w nazwie - oznacza zintegrowane diody zabezpieczające przed przepięciami.
Płytka uniwersalna.
Układ L293D
Podstawka DIP16 ochroni nasz cenny układ L293D przed przegrzaniem podczas lutowania i pozwoli później bez bólu użyć go również do innych projektów.
Dwa fototranzystory 5mm w przeźroczystej obudowie dostępne. Przeźroczysta obudowa sugeruje działanie w paśmie światła widzialnego (np. latarka). Można zastosować fototranzystory w czarnych/granatowych obudowach, ale wówczas robot będzie czulszy na światło z diody IR (świecącej w paśmie podczerwieni).
Podstawka DIP.
Fototranzystor.
Dwa rezystory 100kOhm 0,25W 5%. Jest to opcja dla robota działającego w niemal całkowitych ciemnościach. UWAGA! Warto zaopatrzyć się w kilka innych wartości rezystorów z zakresu 10kOhm - 100kOhm (np. 47kOhm, 22kOhm), żeby później wybrać wersję, przy której praca robota najbardziej nam odpowiada.
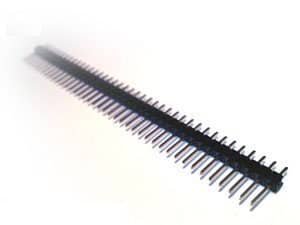
Jedna listwa goldpin 1x40, jeśli jako napęd wybraliśmy przerobione serwa modelarskie.
Rezystory.
Listwa goldpinów.
Koszyk na baterie, polecam zamykany z włącznikiem i miejscem na 3xAA.
Kawałki przewodów. Kolorowe przewody skutecznie można zastąpić przewodami z zabawek albo "rozebraną" tzw. skrętką komputerową.
Koszyk na baterie.
Przewody.
Komplet elementów elektronicznych dostępny jest w sklepie Botland >> ZestawŚwiatłolub <<
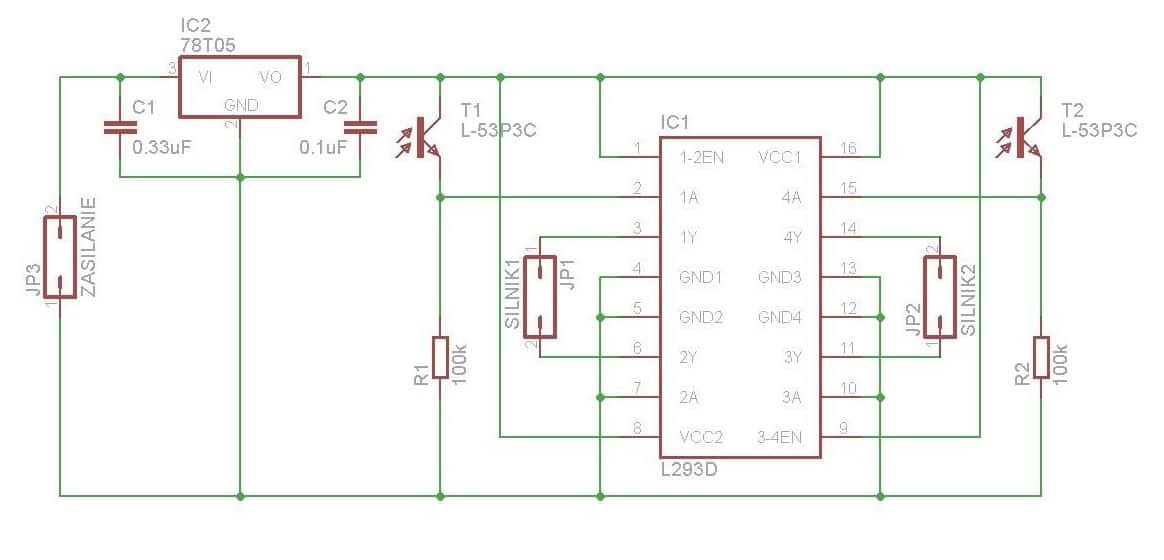
Schemat i zasada działania
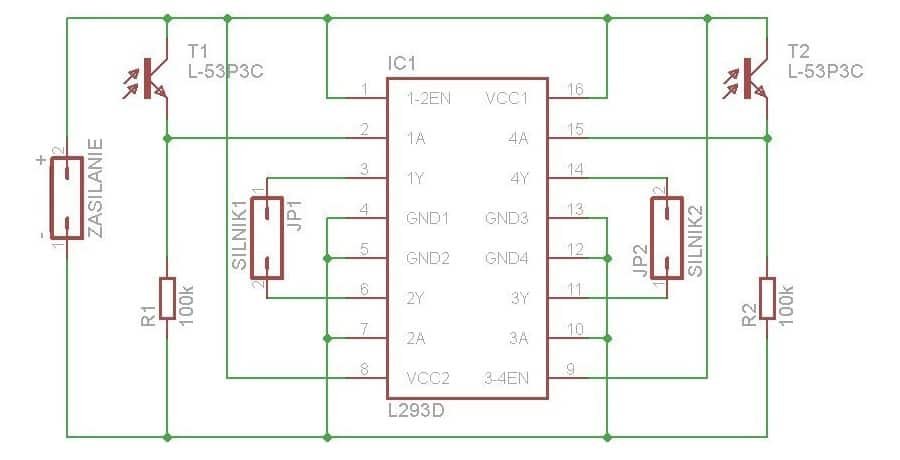
Schemat robota został uproszczony do minimum. Bardziej zaawansowane roboty buduje się w oparciu o mikrokontrolery, które trzeba zaprogramować. W tym przypadku całą funkcję "logiki" działania przejmuje układ L293. Jest on wyspecjalizowanym układem do niezależnego sterowania dwóch silników w oparciu o mostek H.
Fototranzystory wraz z rezystorami tworzą dzielniki napięcia, które "ustalają" napięcie na pinie 2 i 15 w zależności od natężenia światła padającego na odpowiedni fototranzystor. W momencie kiedy napięcie to przekracza 2.3V, układ "rozpoznaje" je jako stan wysoki (logiczne 1) i załącza silnik.
Aby lepiej zrozumieć pracę układu, wypada zapoznać się z jego notą katalogową (niestety, wymagana jest znajomość języka angielskiego).
W tym momencie warto założyć na komputerze specjalny folder, w którym będziecie gromadzić dokumentacje podzespołów tak, aby były zawsze pod ręką.
Dokumentacje znajdziecie bardzo łatwo, wpisując w google nazwę układu i słowo "datasheet" po spacji. Szukajcie plików w formacie PDF.
Schemat układu.
Przedstawiony układ jest przeznaczony do zasilania napięciem z zakresu 4.5V ÷ 7V. Ja wybrałem 3 baterie AA 1.5V połączone szeregowo, co daje sumaryczne napięcie 4.5V, ale nowe baterie często mają napięcie nieco wyższe - 1.6V ÷ 1.7V, czyli w moim przypadku maksymalne napięcie osiągnie ok. 5V. Możecie jednak wybrać dowolne źródło zasilania (np. baterię 4.5V, albo 4 baterie AA) w przedziale 4.5V ÷ 7V, warto też pamiętać o jakimś włączniku wlutowanym szeregowo w obwód zasilania.
Jeszcze raz zwracam uwagę na prąd pobierany przez silniki - nie może przekraczać 600mA na silnik, przy wybranym napięciu zasilania! Najlepiej, jak zachowana jest pewna "odległość" od tej wartości, tak na wszelki wypadek.
Pamiętajcie, że silnik z zatrzymanym mechanicznie wałem obrotowym pobiera znacznie więcej prądu niż podczas zwykłej pracy! Nieuwaga w tym wypadku może nas kosztować co najmniej 5zł, czyli tyle co nowy L293D.
Montaż elementów na płytce uniwersalnej PDU-21
Dla ułatwienia życia początkującym, postanowiłem rozrysować mój sposób rozmieszczenia elementów na płytce uniwersalnej. Na początku nie ma nic złego w korzystaniu z cudzych opracowań, ale jeśli chcecie się czegoś nauczyć, spróbujcie porównywać na bieżąco lutowane połączenia ze schematem, żeby zrozumieć dlaczego wygląda to tak, a nie inaczej. Być może następnym razem rozmieścicie elementy po swojemu i zrobicie to znacznie lepiej ode mnie. Mimo prostoty układu, możliwości jest tu całkiem sporo.
Nawet jeśli trzymaliście już wcześniej lutownicę w ręce, z doświadczenia wiem, że nie zawsze początkujący lutują prawidłowo. Wynika z tego sporo problemów i ciężko jest pomóc w dochodzeniu "dlaczego układ nie działa? Wszystko podłączyłem zgodnie ze schematem!".
Jeśli nie masz doświadczenie z lutownicą,
to koniecznie sprawdź nasz kurs lutowania!
Tzw. zimne luty/niedokładne połączenia potrafią zszargać nerwy i dlatego zawsze warto każdy lut robić na 200% pewności. Polecam uważnie obejrzeć poniższy film - zwróćcie uwagę na etap nagrzewania ścieżki i wyprowadzenia elementu, a następnie przykładania do nich cyny (od 3:00).
Nigdy, przenigdy nie przenoście cyny na grocie i nie "strącajcie"
jej przy elemencie (pierwsza część filmu)!
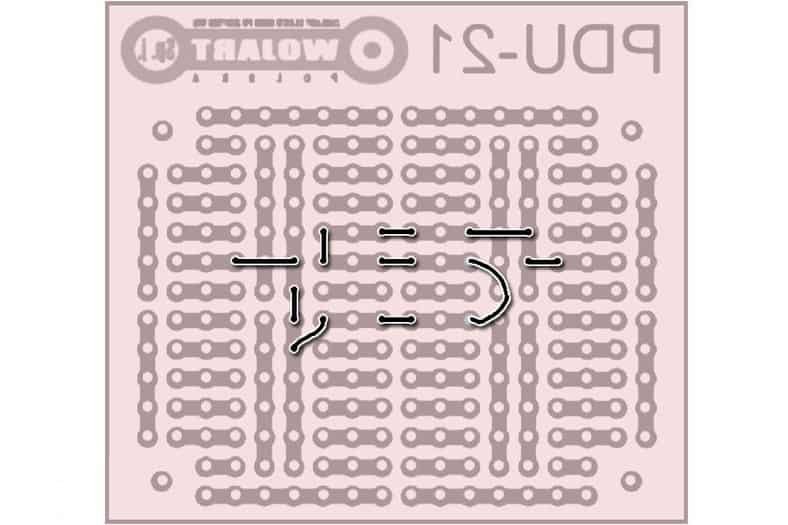
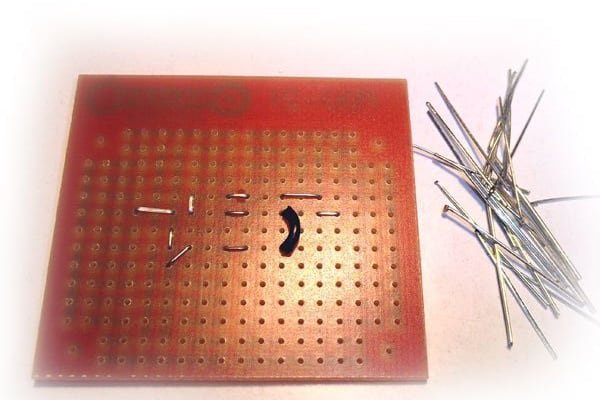
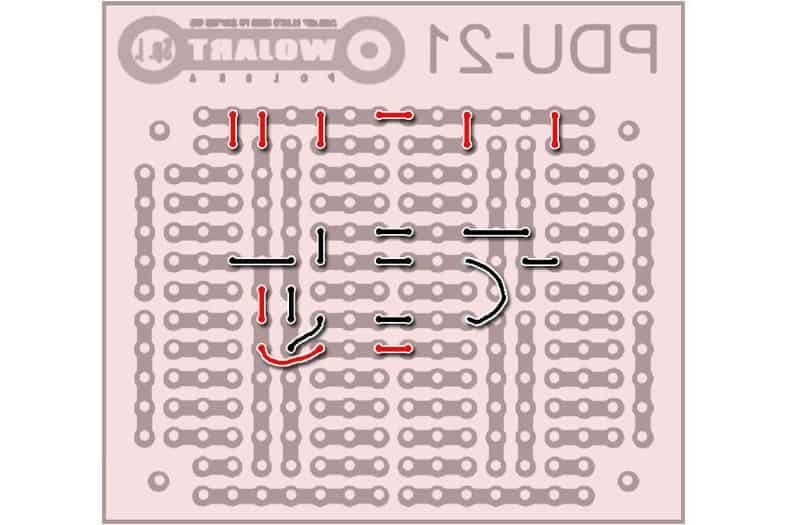
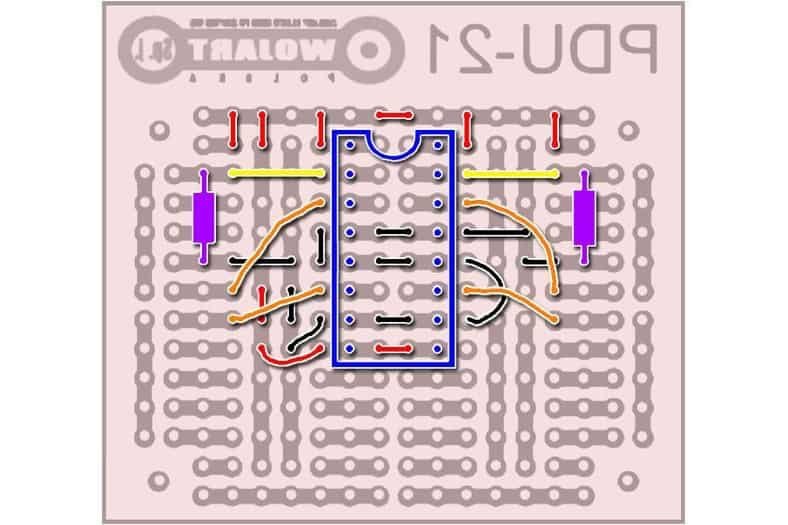
Poniższe instrukcje składają się z podwójnych plików graficznych. Rysunek przedstawia dokładnie to samo ujęcie, co zdjęcie. Warto unieść płytkę pod światło (ścieżkami po stronie swiatła) i wtykać elementy zgodnie ze schematami montażowymi.
1. Sygnał GND ("-")
Jak widać na zdjęciu, czasem zamiast przewodu w izolacji, opłaca się wykorzystać kawałki drutu (np. odcięte "nóżki" rezystorów, diod itp.). Celowo wybrałem na płytce większą liczbę krótszych zworek, poniważ w taki sposób lutuje się dużo łatwiej i szybciej. Oczywiście, dwa niezaizolowane przewody nie powinny się krzyżować (w przypadku zetknięcia nastąpi zwarcie).
Schemat montażowy
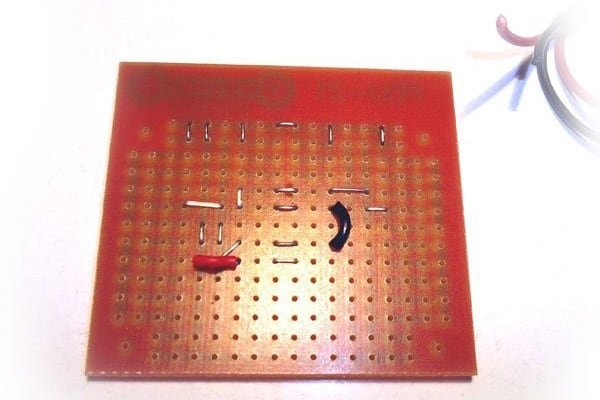
Postęp na płytce
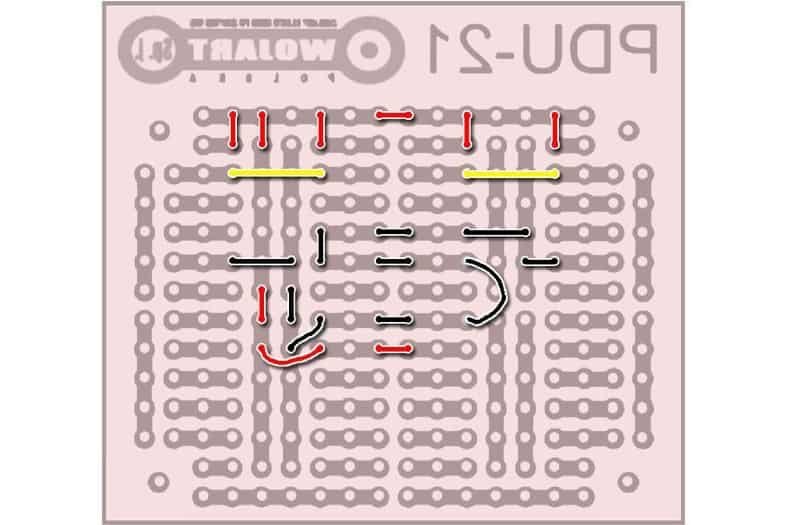
2. Sygnał VCC ("+")
Schemat montażowy
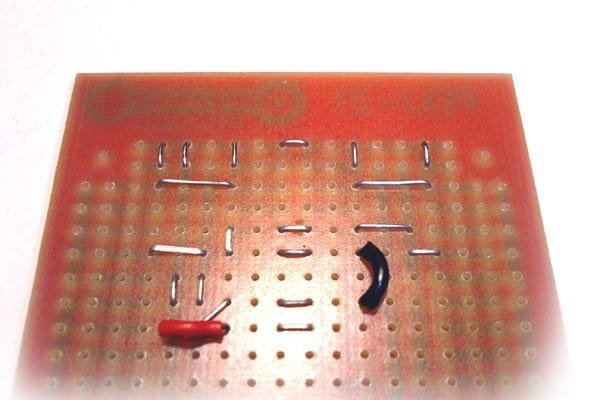
Postęp na płytce
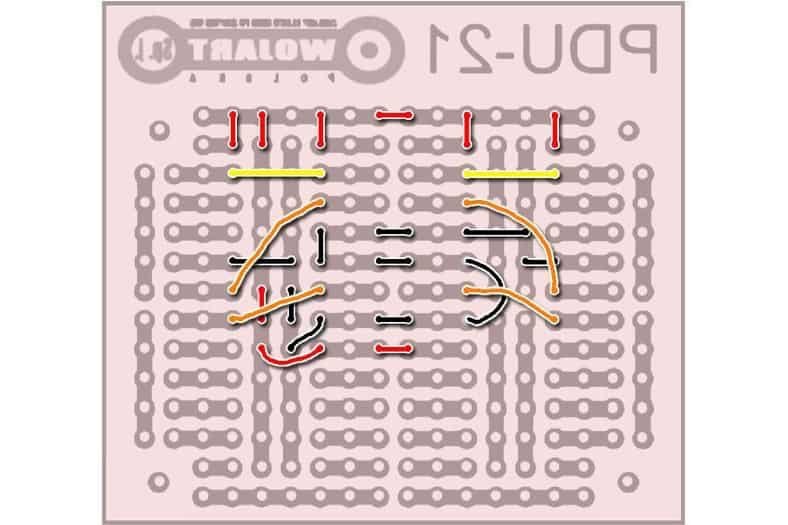
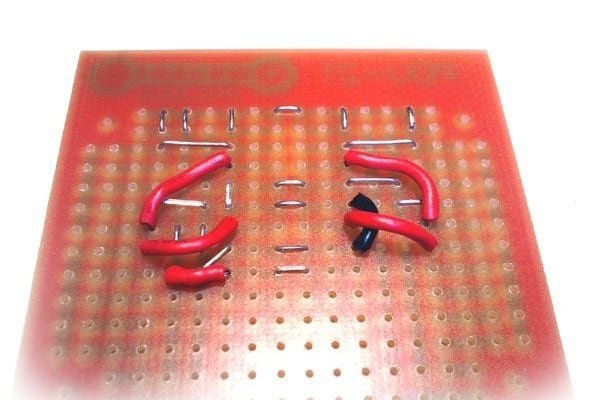
3. Sygnał z fototranzystorów
Schemat montażowy
Postęp na płytce
4. Sygnał zasilający silniki
Schemat montażowy
Postęp na płytce
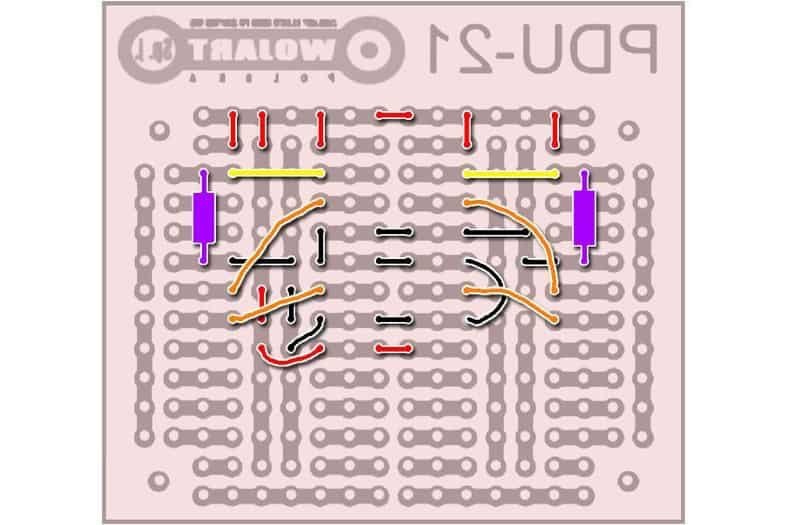
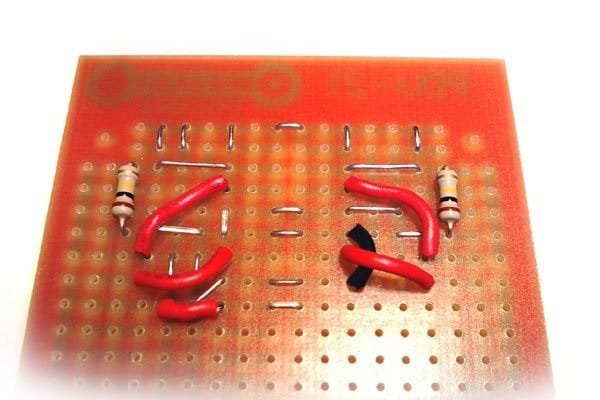
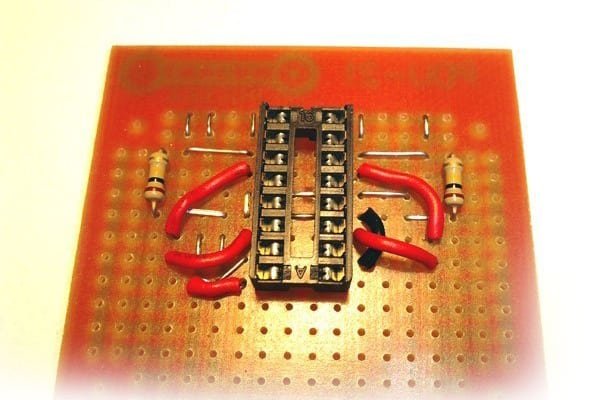
5. Rezystory 100kOhm
Schemat montażowy
Postęp na płytce
6. Podstawka pod układ
Zwróćcie uwagę na to, aby wgłębienie znajdowało się na górze (tak, jak na rysunku).
Schemat montażowy
Postęp na płytce
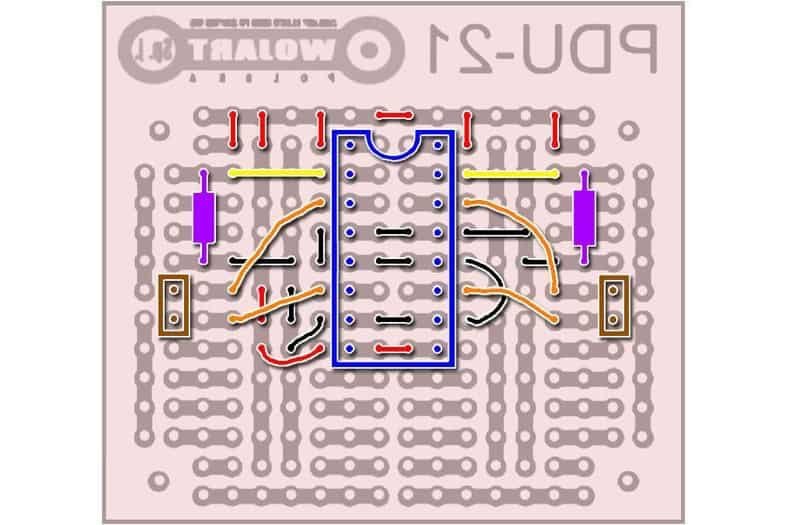
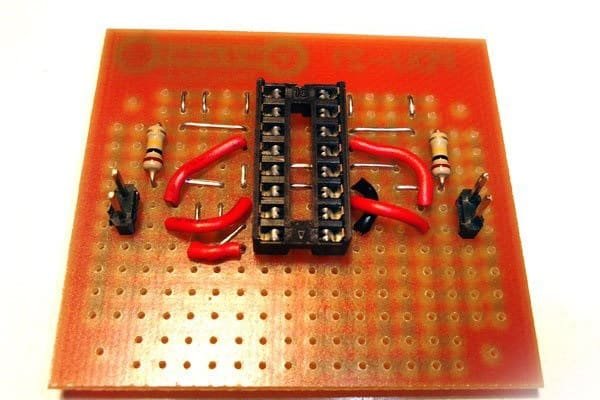
7. Wyprowadzenia goldpin
Należy je wlutować, jeśli korzystamy z przerobionych serwonapędów modelarskich. Jeśli chcemy użyć silników z przekładniami, których przewody nie kończą się pasującym złączem, to można owe przewody wlutować bezpośrednio w płytkę.
Schemat montażowy
Postęp na płytce
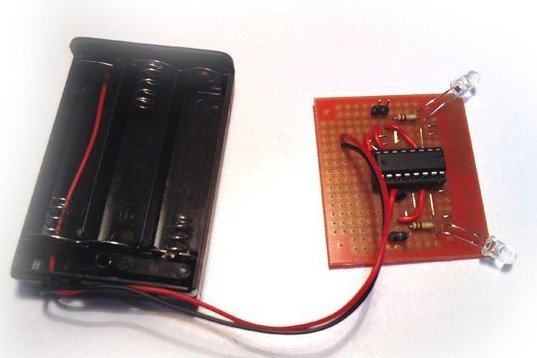
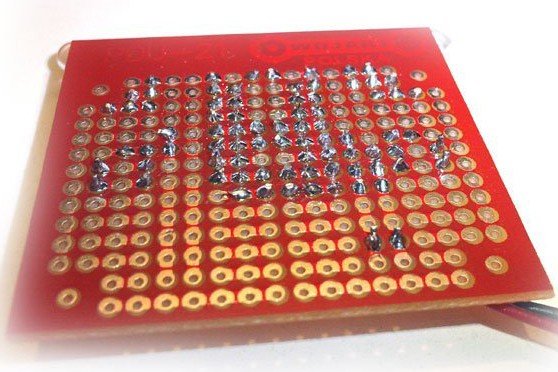
Polutowany układ powinien wyglądać mniej-więcej jak poniższy:
Widok od strony elementów
Widok od spodu
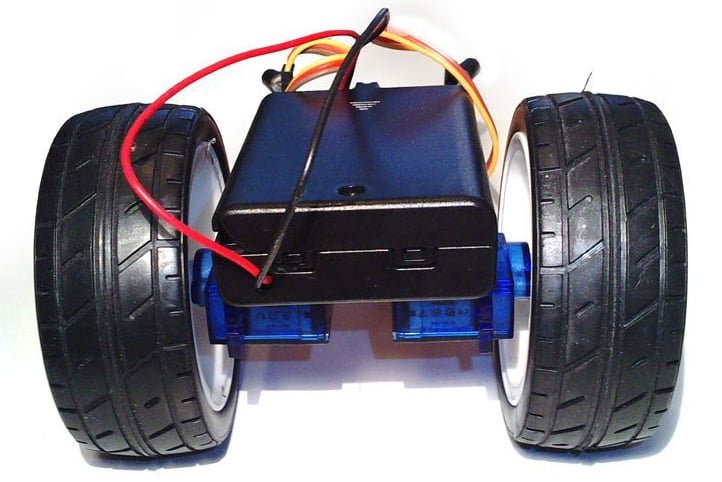
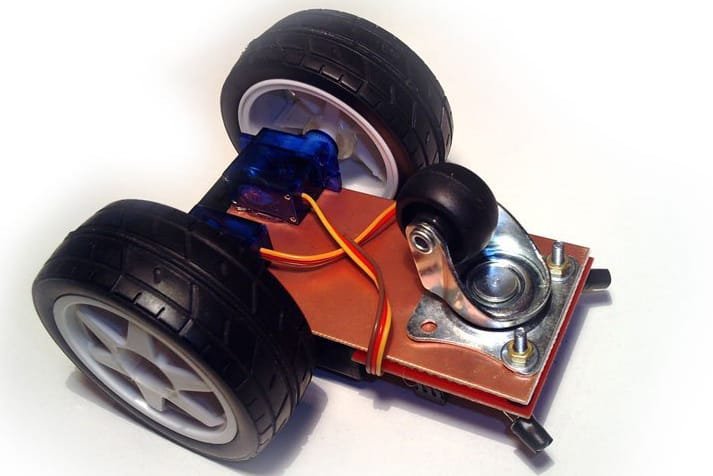
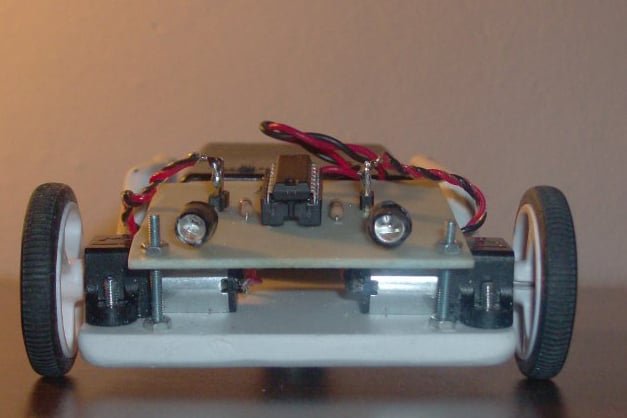
Podwozie
Układ napędowy zbudowałem bazując na wspomnianych wcześniej mikroserwach (Hextronic HX900), kołach od zabawki (a konkretniej od modelu samochodu 1:10, można użyć również np. nakrętek od słoika - tak jak to zrobiłem w tym artykule o budowie programowalnego linefollowera) oraz kółku podporowym z działu meblowego w Leroy Merlin.
Kurs budowy światłoluba
Rama robota to po prostu podłużny kawałek laminatu (do kupienia w sklepach elektronicznych), ale skutecznie można go zastąpić np. deseczką. Połączenia wykonałem przy pomocy śrub (widocznych z przodu) oraz dużej ilości kleju typu "hotglue". Jeśli ktoś nie ma pistoletu klejowego, to z powodzeniem może użyć śrubek, opasek montażowych, taśmy klejącej dwustronnej itp.
Budowa robota w oparciu o gotowe PCB
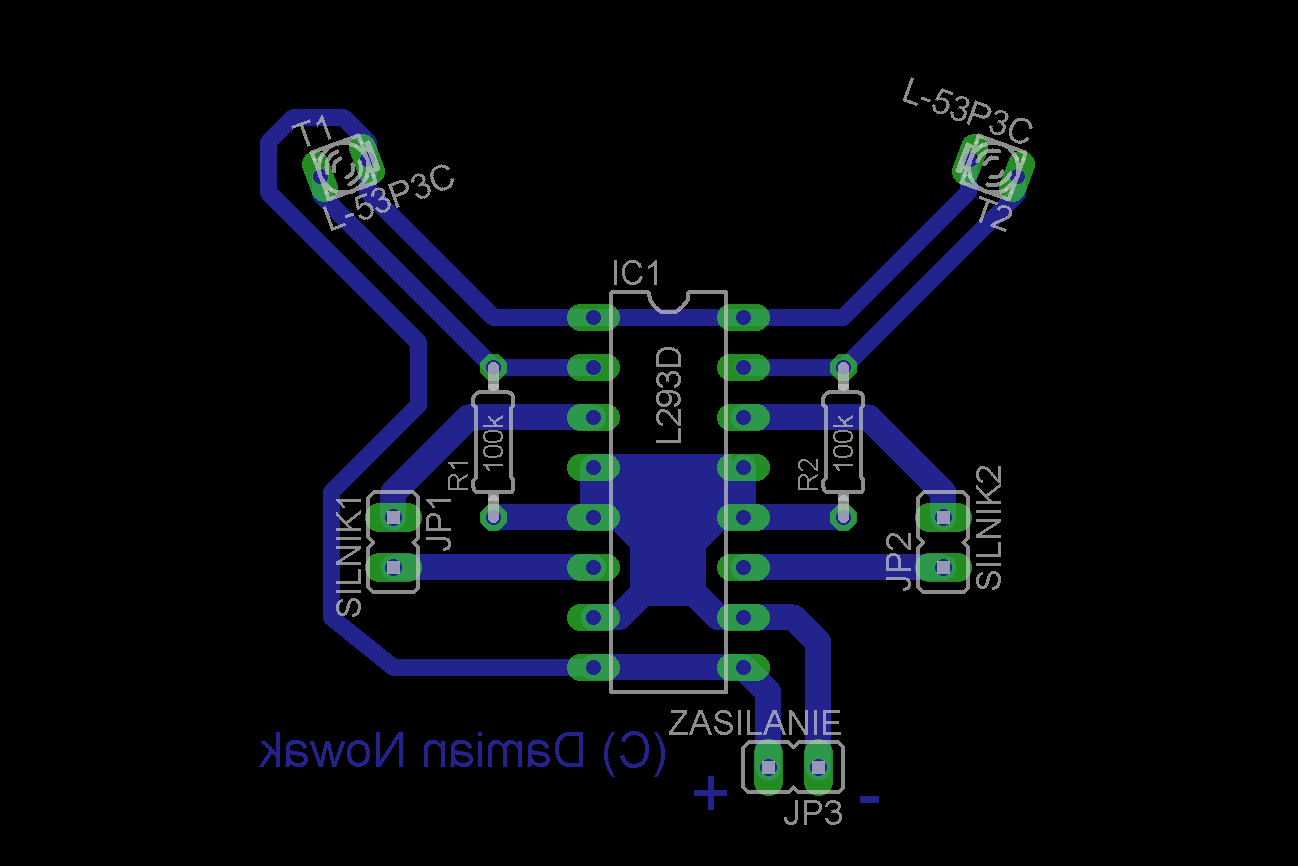
Osoby z większym doświadczeniem mogą zbudować tego robota bazując na wytrawionej we własnym zakresie płytce drukowanej. W załączniku znajduje się plik PDF gotowy do wydruku na papierze kredowym/folii. Rozmieszczenie elementów:
Projekt przykładowej PCB
Więcej o tworzeniu schematów oraz PCB
znajdziesz w naszym kursie EAGLE.
Temat trawienia i wykonywania płytek był już dokładnie omawiany na forum np.: tutaj, tutaj lub tutaj.
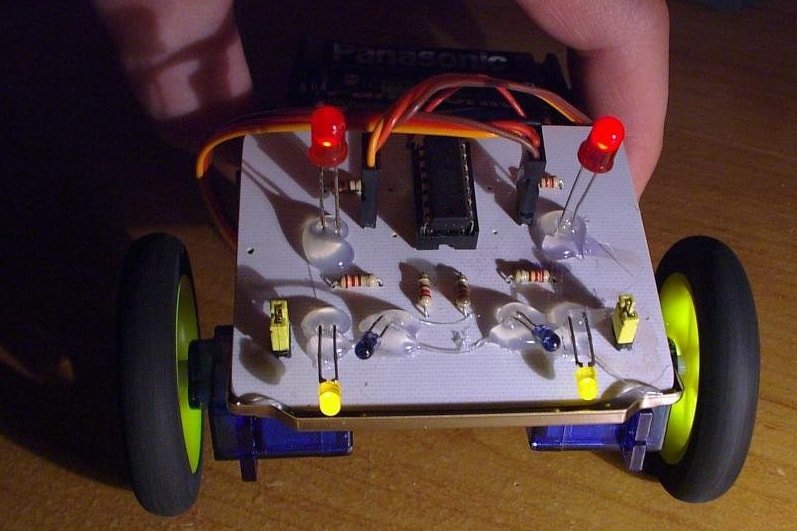
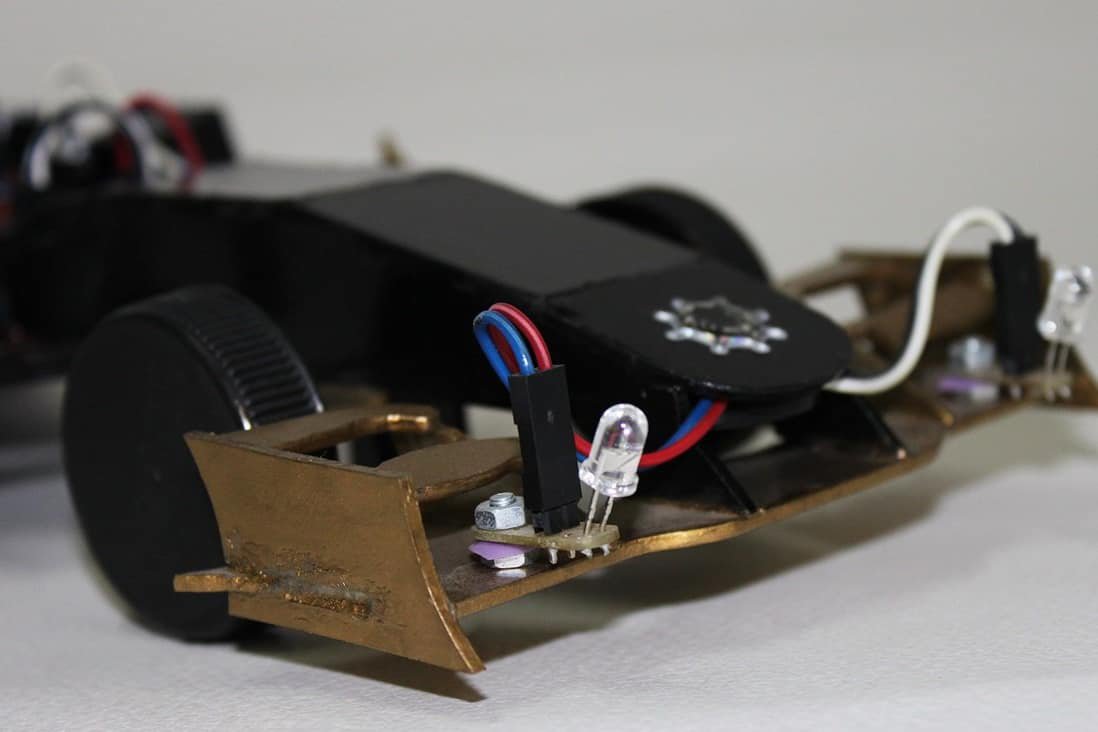
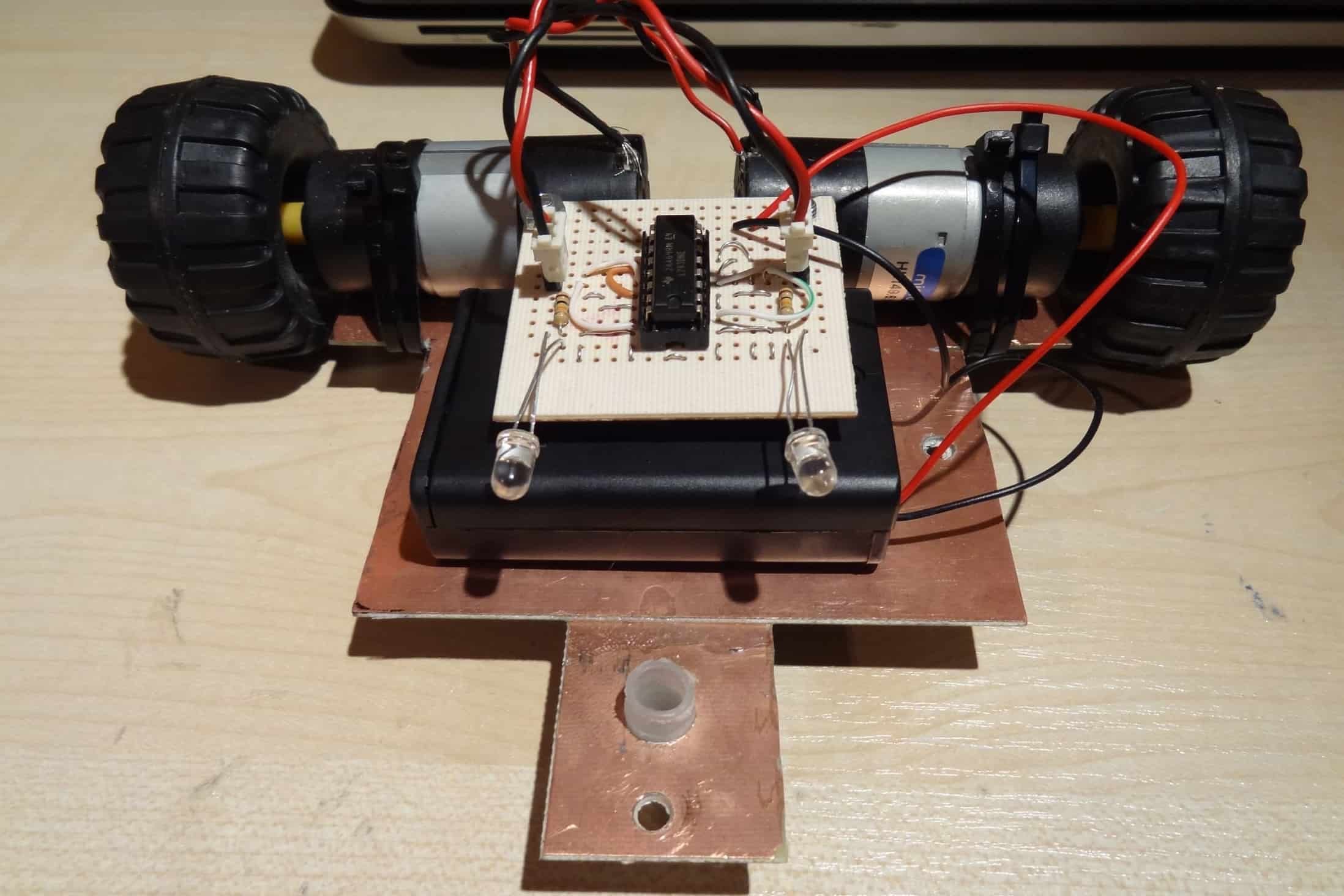
Przykładowe realizacje
Poniżej kilka przykładowych, podobnych robotów, którzy stworzyli nasi użytkownicy:
Pytanie 1: Czy mogę zasilić robota akumulatorem 7.2V (bez zmian w schemacie)? Pytanie 2: Chciałbym zasilać silniki napięciem wyższym niż 7V, co muszę zrobić? Odpowiedź: Bezwzględnie nie można zasilać robota napięciem wyższym od 7V bez zmian w schemacie! Jest to napięcie określone przez producenta L293 jako "absolutnie maksymalną wartość" dla zasilania części logicznej (zachęcam do wyszukania tej informacji w nocie katalogowej układu). Trzeba też pamiętać, że napięcie w pełni naładowanego akumulatora jest zdecydowanie wyższe niż to przedstawione na naklejce/nadruku.
Można korzystać z częściowo zużytego akumulatora (przed podłączeniem należy zmierzyć napięcie na jego zaciskach), ale zdecydowanie lepszym rozwiązaniem jest zastosowanie stabilizatora. Schemat takiego rozwiązania ma dwa warianty:
a) Jeśli silniki chcemy zasilać razem z logiką, czyli 5V. Dobrym stabilizatorem do tego celu jest 78S05 lub 78T05 (wersja "T" jest na wyższy prąd pobierany przez silniki, ok. 3A).
Pierwsza modyfikacja schematu
b) jeśli silniki chcemy zasilać bezpośrednio z baterii/akumulatora (możliwe napięcia wyższe, jak np. 9V). Tutaj wystarczy stabilizator 78L05.
Druga modyfikacja schematu
UWAGA! Ogólnie mówiąc - im większa różnica napięć między źródłem zasilania a 5V, tym gorzej dla stabilizatora.
Należy zmierzyć prąd pobierany przez pracujący układ przy zasilaniu z 5V (dla schematu "a" z podłączonymi silnikami, dla schematu "b" bez podłączonych silników) i policzyć ciepło wydzielane na obudowie stabilizatora według wzoru:
Łatwo policzyć, że w temperaturze pokojowej 21°C, zasilaniu 24V i poborze prądu np. 200mA, stabilizator nagrzeje się do 247°C (21°C + Przyrost_temperatury), a układ jest w stanie pracować w temperaturze do 125°C - innymi słowy, ulegnie trwałemu uszkodzeniu.
W tym wypadku trzeba zastosować radiator, który jest w stanie znacznie poprawić odprowadzanie ciepła do otoczenia. Temat jest bardzo obszerny, zainteresowanym polecam tą lekturę: "Podstawy elektroniki", dział "Wyższa szkoła jazdy".
Pytanie 3:Mam inną płytkę uniwersalną, czy dam radę zbudować tego robota na niej? Odpowiedź: Oczywiście, że tak. Cała kwestia polega tylko na tym, żeby przenieść połączenia ze schematu na połączenia "fizyczne" między elementami wlutowanymi na Twojej płytce. Z tym problemem musisz sobie niestety poradzić sam.
Pytanie 4: Złożyłem robota i silniki nie reagują na zmiany oświetlenia. Odpowiedź: Po pierwsze - sprawdź czy połączenia faktycznie odpowiadają tym na schemacie. Szukaj wszelkich zwarć (cyna rozlana na dwa pady, stykające się "nóżki" elementów, błędy w montażu itp.) oraz przerw (podejrzanie wyglądające luty, zarysowane przypadkowo lub pęknięte ścieżki itp.). Użyj do tego celu multimetru ustawionego na badanie ciągłości obwodu (pikanie przy zetknięciu dwóch próbników).
Jeśli masz 200% pewności, że polutowałeś układ dobrze, to zewrzyj np. kawałkiem drutu nóżki fototranzystora - odpowiadający mu silnik powinien kręcić się bez przerwy. Możliwe, że wlutowałeś fototranzystory odwrotnie (kwestia prawidłowej polaryzacji), lub czułość jest zbyt duża - możesz zmienić rezystory przy fototranzystorach na mniejsze, np. 47kOhm.
Pytanie 5: Czy mogę zastosować inny fototranzystor, niż podany przez Ciebie? Odpowiedź: Tak, pod warunkiem, że ma on dwie "nóżki" i przejrzystą obudowę (przeźroczystą lub zabarwioną na niebiesko). Fototranzystory czarne będą reagować głównie na podczerwień, więc musiałbyś dysponować odpowiednim źródłem światła (np. latarka z diod IR). Różne firmy różnie mogą oznaczyć polaryzację fototranzystorów, więc należy uwzględnić możliwą konieczność zamienienia miejscami nóżek fototranzystora.
Pytanie 6: Czy zamiast fototranzystorów mogą być fotodiody lub fotorezystory? Odpowiedź: Teoretycznie można, ale układ będzie mniej czuły.
Pytanie 7: Czym jest GND i VCC? Odpowiedź: W tym przypadku GND to "-", a VCC to "+" zasilania.
Pytanie 8: Jeżeli podstawka pod uklad ma "wyżłobienie" z jednej strony i sam uklad też je ma, to czy te wyżłobienia mają byc później po tej samej stronie, czy jest to bez znaczenia? Odpowiedź: Powinny być po tej samej stronie.
Pytanie 9: Z czego zrobić obudowę do robota? Odpowiedź: Opcji jest bardzo dużo, wszystko zależy od Twojej wyobraźni oraz tego, co masz pod ręką. Może być kawałek deseczki, klocki lego, stara zabawka... Jeśli naprawdę nic nie przychodzi Ci do głowy, to:
Pytanie 10: Przy jakiej ilości godzin pracy dziennie projekt jest do zrealizowania w dwa tygodnie? Odpowiedź: "Dwa tygodnie" dotyczą głównie przygotowania merytorycznego - nauki podstaw elektroniki, czytania schematów, lutowania, przejrzenia ważnych artykułów - oraz zakupu części. Sam projekt można wykonać spokojnie w jedną godzinę.
Odnośniki do niektórych produktów umieszczone w tym wpisie prowadzą do głównego partnera serwisu – sklepu Botland. Nie są to linki afiliacyjne. Na tej podstronie opisaliśmy na czym dokładnie polega nasza współpraca.
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.








































Trwa ładowanie komentarzy...