Kursy • Poradniki • Inspirujące DIY • Forum





Wpisy z kategorii: Komputery SBC, strona 2
Jetson TK1 okiem robotyka – #1 – Słowo wstępne
Zabrakło Wam kiedyś mocy obliczeniowej na Raspberry Pi lub BeagleBone Black? Jeśli tak, to poznajcie NVidia Jetson TK1 rozwiązanie z procesorem wyposażonym w 192 rdzenie CUDA!
Jeśli nie zajmowaliście się wcześniej komputerami jednopłytkowymi, to tym bardziej jest to artykuł dla Was. Może zaczniecie właśnie od Jetsona?
Kurs BeagleBone Black – #2- interfejs UART

W drugiej części kursu przedstawię konfigurację oraz obsługę interfejsu UART. Oprócz obsługi z konsoli, omówię także przykładowy program napisany w języku C, który umożliwi komunikację między BBB, a komputerem PC.
Na wstępie zaprezentuję kilka podstawowych informacji dotyczących interfejsu UART- jednego z podstawowych protokołów używanych w robotyce.
Kurs BeagleBone Black – #1- Pierwsze kroki

Niniejszy artykuł ma na celu przedstawienie podstawowych kroków związanych z obsługą płytki Beglebone Black oraz omówienie sposobu łączenia się z nią za pomocą SSH.
Artykuł skierowany jest do osób, które zaczynają swoja przygodę z Beglebone Black.
Przewodnik instalacji Linuxa na platformie embedded
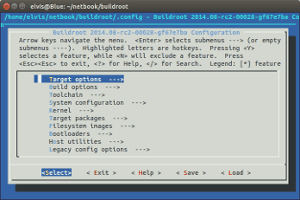
W pierwszej części artykułu opisałem możliwość użycia taniego netbooka w roli sterownika robota. Zgodnie z zapowiedzią w kolejnym wpisie przedstawiam instrukcję instalacji Linuxa na wybranej wcześniejszej platformie.
Do dalszej pracy niezbędne są: bootloader, jądro linuxa, system plików oraz kompilator (toolchain).

Dołącz do 20 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.




