Sztuczna inteligencja to temat kojarzony głównie z komputerami PC lub chmurami obliczeniowymi. Jednak z AI można korzystać nawet na małych mikrokontrolerach (np. z popularnej serii STM32).
Wszystko za sprawą X-CUBE-AI, czyli pakietu od firmy STMicroelectronics, dzięki któremu każdy z łatwością przygotuje swoją sieć neuronową.
Algorytmy związane z szeroko pojętą sztuczną inteligencją (ang. artificial intelligence, AI) są ostatnio popularnym tematem. Na ogół AI kojarzy się z ogromnym zapotrzebowaniem na moc obliczeniową, wykorzystaniem GPU (ang. graphics processing unit) oraz obliczeniami w chmurze.
Jednak okazuje się, że sztuczna inteligencja znajduje też zastosowanie w świecie mikrokontrolerów. Powstał nawet termin na określenie takich zastosowań – Edge AI. O tym, jak popularny jest temat AI, świadczy też pojawienie się sprzętowych akceleratorów przeznaczonych dla urządzeń wbudowanych, tzw. TPU (ang. tensor processing unit). Przykładami takich platform są np. Google Coral albo Intel Neural Compute Stick. Dostępne są też mikrokontrolery z wbudowanym TPU, np. Kendryte K210. Ale to nie wszystkie możliwości –tym razem uruchomimy sztuczną sieć neuronową na STM32.
Celem artykułu jest przedstawienie (od strony praktycznej), jak wykorzystać prostą sieć neuronową na STM32 do wykrywania konkretnego gestu – podwójnego „machnięcia” płytką.
Sztuczna inteligencja na STM32
Firma STMicroelectronics, producent m.in. popularnych układów STM32, postanowiła dostarczyć swój produkt związany ze sztuczną inteligencją. Na razie brak tu sprzętowej akceleracji, ale możemy pobrać za darmo pakiet oprogramowania X-CUBE-AI, który pozwala na łatwe wykorzystanie AI.
X-CUBE-AI, czyli sztuczna inteligencja na STM32
W dalszej części tego wpisu przedstawię bardzo prosty przykład wykorzystania wspomnianej biblioteki na płytce ewaluacyjnej z układem STM32L475. Z góry proszę jednak o wyrozumiałość, bo temat ten był dla mnie nowy, a sztuczną inteligencją zajmuję się jedynie hobbystycznie. Artykuł ten warto więc potraktować jako opis moich eksperymentów, które mogą jednak zawierać pewne niedoskonałości. W razie wątpliwości zachęcam do dyskusji w komentarzach.
Wybór platformy sprzętowej
Jakiś czas temu na forum Forbota pojawił się opis projektu czujnika HRV w wersji DIY. Przedstawione tam wykrywanie bicia serca na podstawie zebranego sygnału jest jednym z przykładów, w których algorytmy sztucznej inteligencji mogą znaleźć zastosowanie.
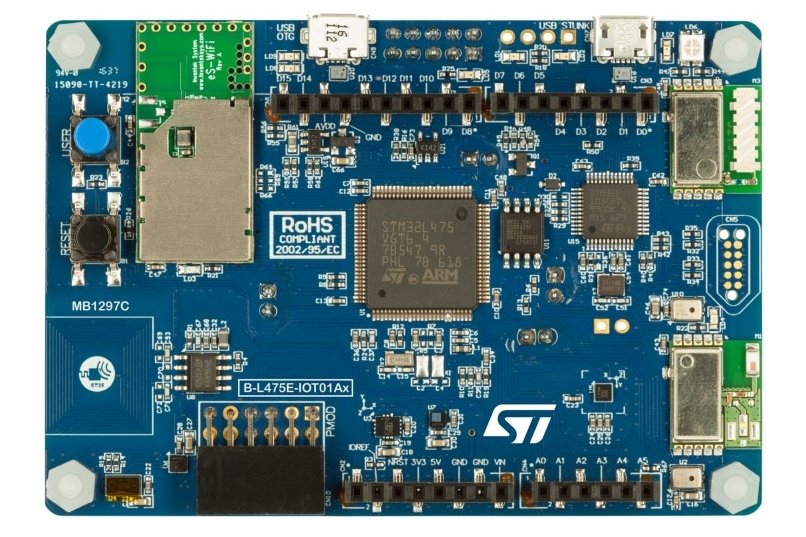
Osobiście nie jestem entuzjastą projektowania „urządzeń medycznych” metodami hobbystycznymi, ale wspomniany artykuł zachęcił mnie do wypróbowania X-CUBE-AI do wykrywania wzorca w innym sygnale. Jako platformę testową wybrałem zestaw uruchomieniowy B-L475E-IOT01A, wyposażony w układ STM32L475 oraz sporo interesujących modułów peryferyjnych (w tym akcelerometr LSM6DSL).
Płytka B-L475E-IOT01A, wyposażona w mikrokontroler STM32L475
Płytka posiada ogromny potencjał, ale w tym projekcie wykorzystam tylko mały jej fragment:
port UART – do komunikacji z PC, przede wszystkim do wysyłania danych,
akcelerometr – jako źródło sygnału,
przycisk – do uczenia sieci,
diodę LED – do sygnalizowania wykrycia gestu.
Zbieranie danych treningowych
Danymi źródłowymi w tym projekcie będą pomiary zebrane z akcelerometru. Podczas uczenia – po wykonaniu gestu, który chcę nauczyć sieć – będę naciskał przycisk na płytce. Dane treningowe mają więc postać czterech liczb: odczytu z akcelerometru dla osi XYZ oraz stanu przycisku.
Uczenie sieci wyglądało zatem w następujący sposób:
Moim celem było nauczenie sieci wykrywania dwukrotnego „machnięcia” płytką. W sumie to trenowanie nie wyszło mi do końca, bo wcale nie jest łatwo wielokrotnie wykonywać taki gest i się nie pomylić. Dlatego ostatecznie sieć ma wykrywać dwukrotne (lub więcej) „machnięcie” płytką. Pozostałe gesty oraz pojedyncze „machnięcia” mają być ignorowane.
Taką sieć można nauczyć właściwie dowolnego gestu – oczywiście pod warunkiem, że sami jesteśmy w stanie ten gest wielokrotnie wykonać (i nie stracimy cierpliwości).
W trakcie zbierania danych informacje z akcelerometru były odczytywane co 20 ms. Z obliczeń wyszło więc, że 128 pomiarów, które przekładają się na 2,56 s, w zupełności wystarcza do tego, aby zarejestrować odpowiedni gest.
Wyniki pomiarów wysyłane są przez port szeregowy
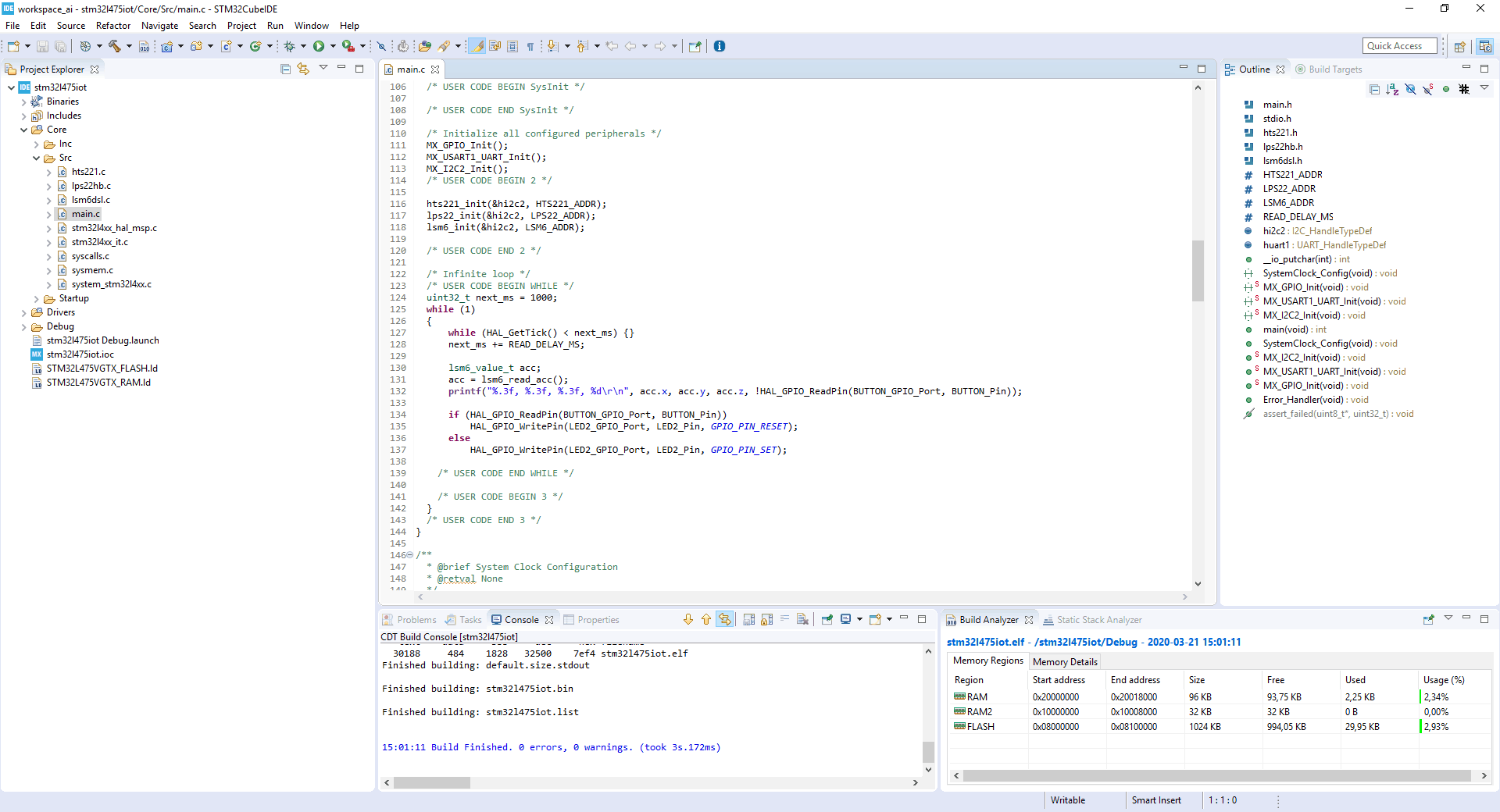
Całe uczenie polegało więc na włączeniu zapisu danych do pliku i cierpliwym „machaniu” płytką oraz naciskaniu przycisku po wykonaniu uczonego gestu. W rezultacie powstał plik data1.csv. Program do zbierania tych danych został napisany w środowisku STM32CubeIDE, dzięki czemu jego kod można było później wykorzystać do testowania wytrenowanej sieci.
Program do zbierania danych
Sam program jest bardzo prosty, do jego napisania wystarczy w zupełności materiał z kursu STM32F4. Mamy już dane treningowe, czas więc przystąpić do najważniejszego, czyli uczenia sieci.
Uczenie sieci dla STM32
Czas wykorzystać dane i przygotować właściwą sieć neuronową. Wspomniane X-CUBE-AI pozwala na użycie sieci zapisanych za pomocą różnych popularnych bibliotek. Tym razem użyłem biblioteki Keras, która jest nie tylko bardzo łatwa w użyciu, ale jeszcze całkiem dobrze opisana. Wydawnictwo Helion ma w swojej ofercie świetną książkę pt. Deep Learning. Praca z językiem Python i biblioteką Keras– bardzo ją polecam, intensywnie z niej korzystałem, przygotowując ten artykuł.
Książka wydawnictwa Helion na temat biblioteki Keras
Trzonem biblioteki Keras – i chyba większości innych związanych z AI– jest język Python, dlatego też poznanie przynajmniej jego podstaw jest niezbędne. Kolejny brakujący element to zainstalowanie interpretera języka Python3 oraz potrzebnych bibliotek. Znacznym ułatwieniem jest w tym przypadku wykorzystanie gotowej „dystrybucji” o nazwie Anaconda.
Strona domowa projektu Anaconda
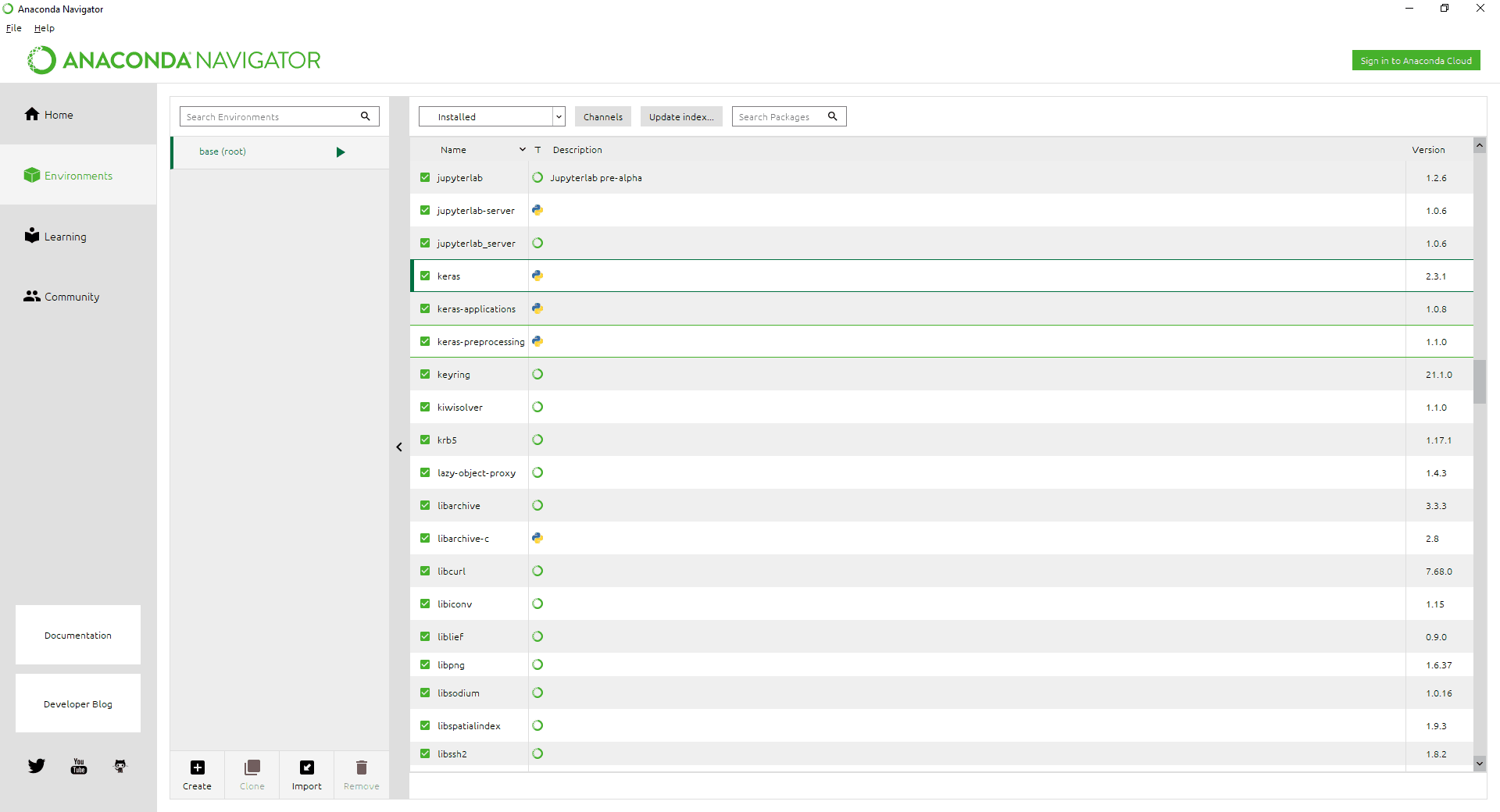
Wystarczy pobrać program i go zainstalować. Za jednym zamachem uzyskamy od razu dostęp do Pythona (w wersji 3) oraz mnóstwa narzędzi pomocnych przy przetwarzaniu danych. Domyślna instalacja niestety nie zawiera potrzebnych nam bibliotek, trzeba więc uruchomić program Anaconda Navigator i doinstalować pakiety: keras, tensorflow oraz matplotlib.
Skrypty używane do trenowania sieci możemy pisać w dowolnym edytorze tekstu, a następnie uruchamiać jak każdy inny program w Pythonie, ale jest to dość niewygodne. Znacznie lepszym (i polecanym w wielu książkach) rozwiązaniem jest wykorzystanie edytora Jupyter albo jego nowszego kuzyna –JupyterLab. W pakiecie Anaconda znajdziemy oczywiście obie aplikacje. Wystarczy uruchomić program Anaconda Navigator i dodać za jego pomocą odpowiedni edytor.
Aplikacja JupyterLab w programie Anaconda Navigator
Sam JupyterLab działa wewnątrz przeglądarki internetowej, co jest o tyle wygodne, że pozwala łatwo pracować na zdalnym komputerze – nie zawsze mamy bezpośredni dostęp do odpowiednio wydajnej maszyny, a pracując w narzędziach Jupyter, możemy wykorzystać moc zdalnej jednostki. Co więcej, możemy tak samo pracować i na płytce typu Jetson Nano, i na potężnej stacji roboczej w chmurze.
Analiza zebranych danych
Zanim przejdziemy dalej, warto nieco bliżej zapoznać się z zebranymi danymi. Napiszmy w Pythonie prosty skrypt, który wczyta oraz przedstawi graficznie pobrane dane. Już na pierwszy rzut oka widać, że dane nie są tak łatwe do analizy jak nieco wyidealizowany przykład z wykrywaniem uderzeń serca.
Na szczęście użycie sieci neuronowej zwalnia nas z obowiązku pisania programu, który będzie musiał te dane ręcznie przetwarzać.
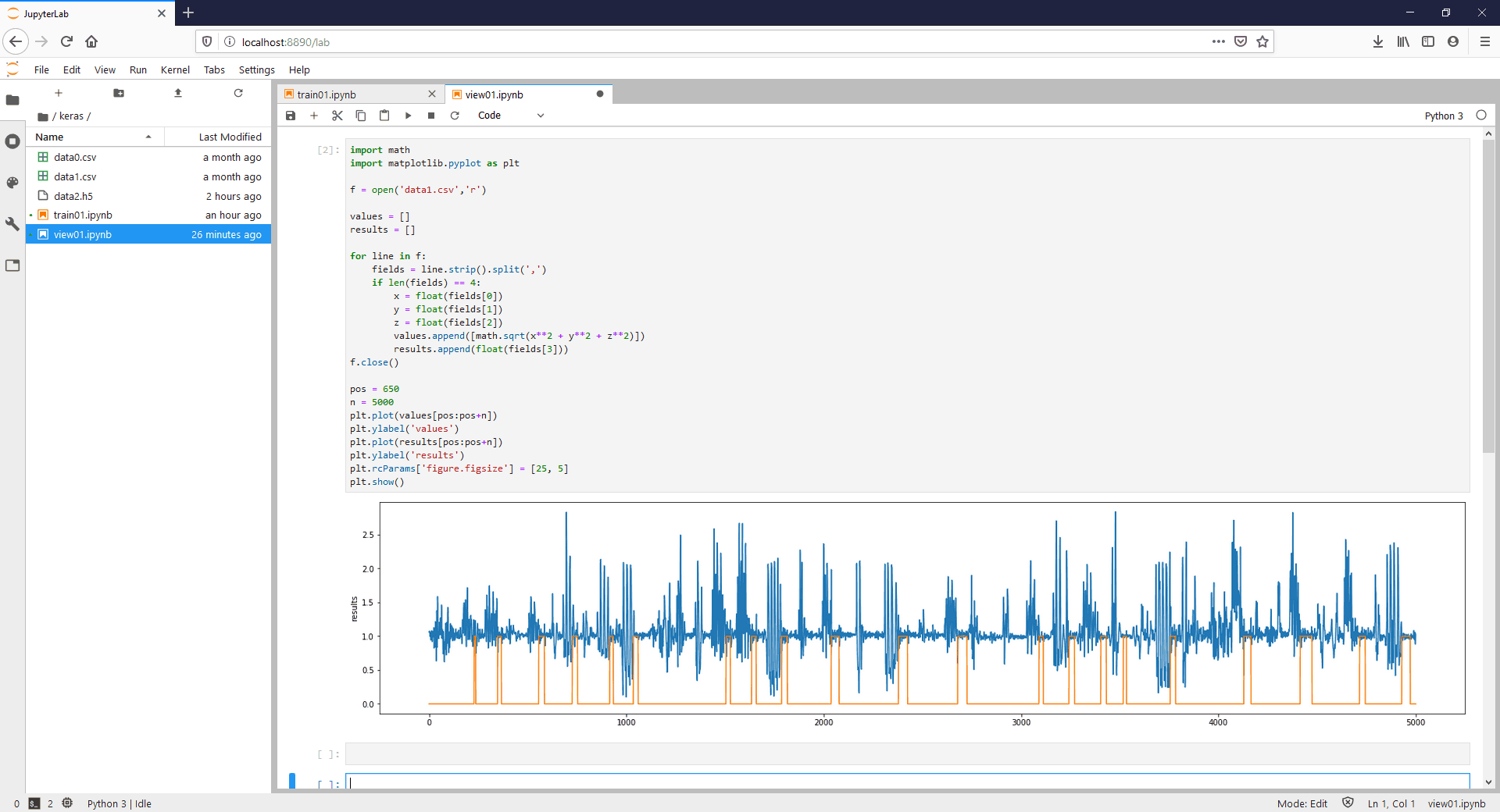
Efekt działania skryptu w Pythonie – wizualizacja zebranych danych
Jak pamiętamy, dane z akcelerometru to trzy liczby, które reprezentują wartości przyspieszenia względem osi XYZ. W przypadku rozpoznawania gestów możemy nieco uprościć sobie zadanie i obliczyć wypadkowe przyspieszenie. Jedna liczba to mniej danych i o wiele łatwiejsza prezentacja diagramów.
Oczywiście tworząc bardziej zaawansowane projekty, możemy wykorzystywać wszystkie dane.
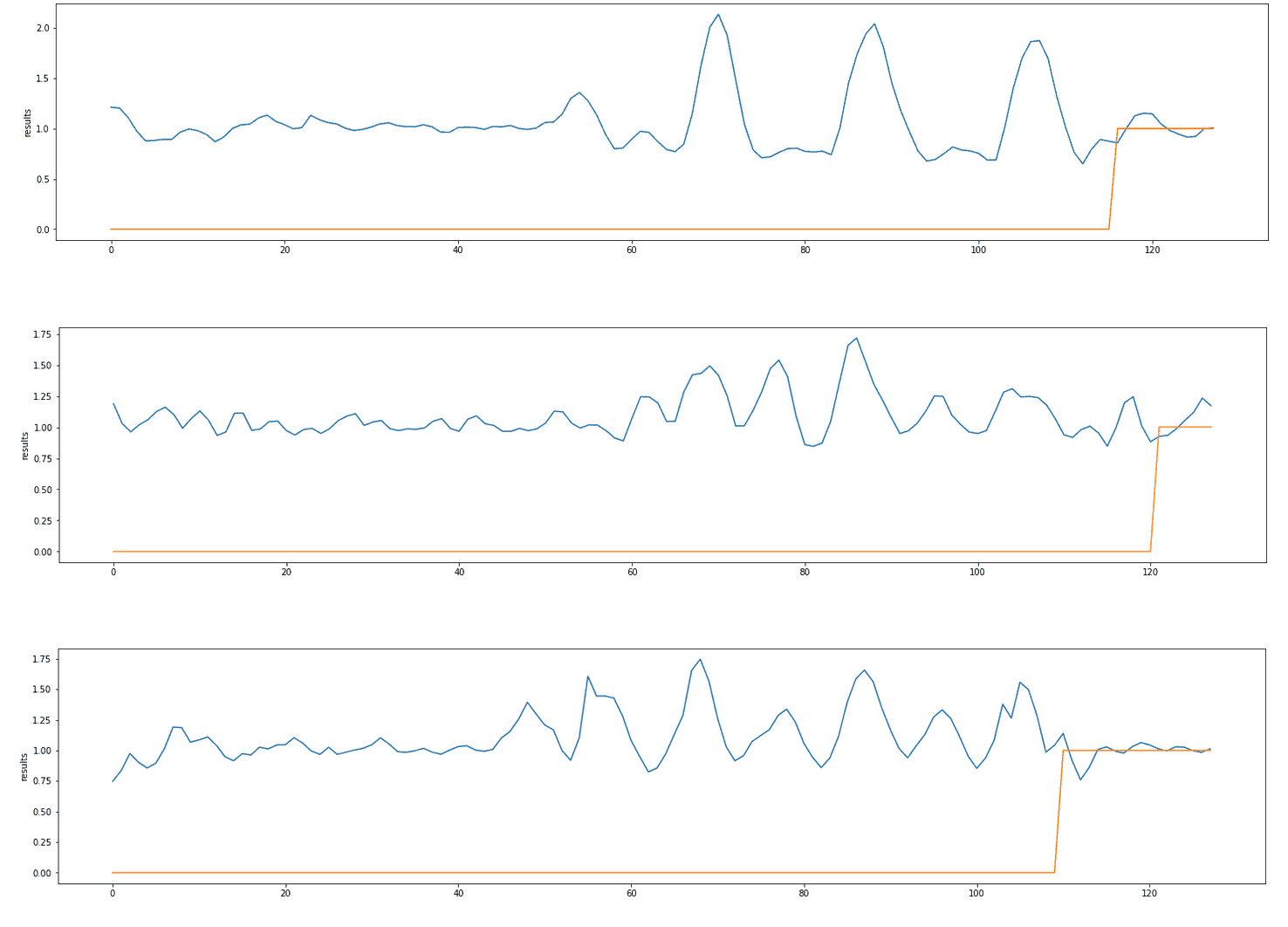
W każdym razie na wykresie widzimy, jak wyglądają nasze dane źródłowe oraz momenty, gdy podczas uczenia naciskany był przycisk. Poniżej jeszcze kilka przykładów, kiedy następowało wykrycie gestu:
Zebrane dane – moment wciśnięcia przycisku
Jak pamiętamy, pomiary wykonujemy co 20 ms, ale jeden wynik nie wystarczy do stwierdzenia, czy nastąpiło wykrycie poszukiwanego gestu. Musimy więc pamiętać historię pomiarów. Jak wspomniałem wcześniej, wybrałem pomiary co 20 ms, a wielkość okna pomiarowego to 128 wyników. Dlatego też nasza sieć na wejściu będzie dostawała ostatnie 128 pomiarów i na tej podstawie ma stwierdzić, czy nastąpiło wówczas „machnięcie” płytką, czy nie.
Teraz możemy utworzyć nowy projekt w JupyterLab i zacząć trenować naszą bazę.
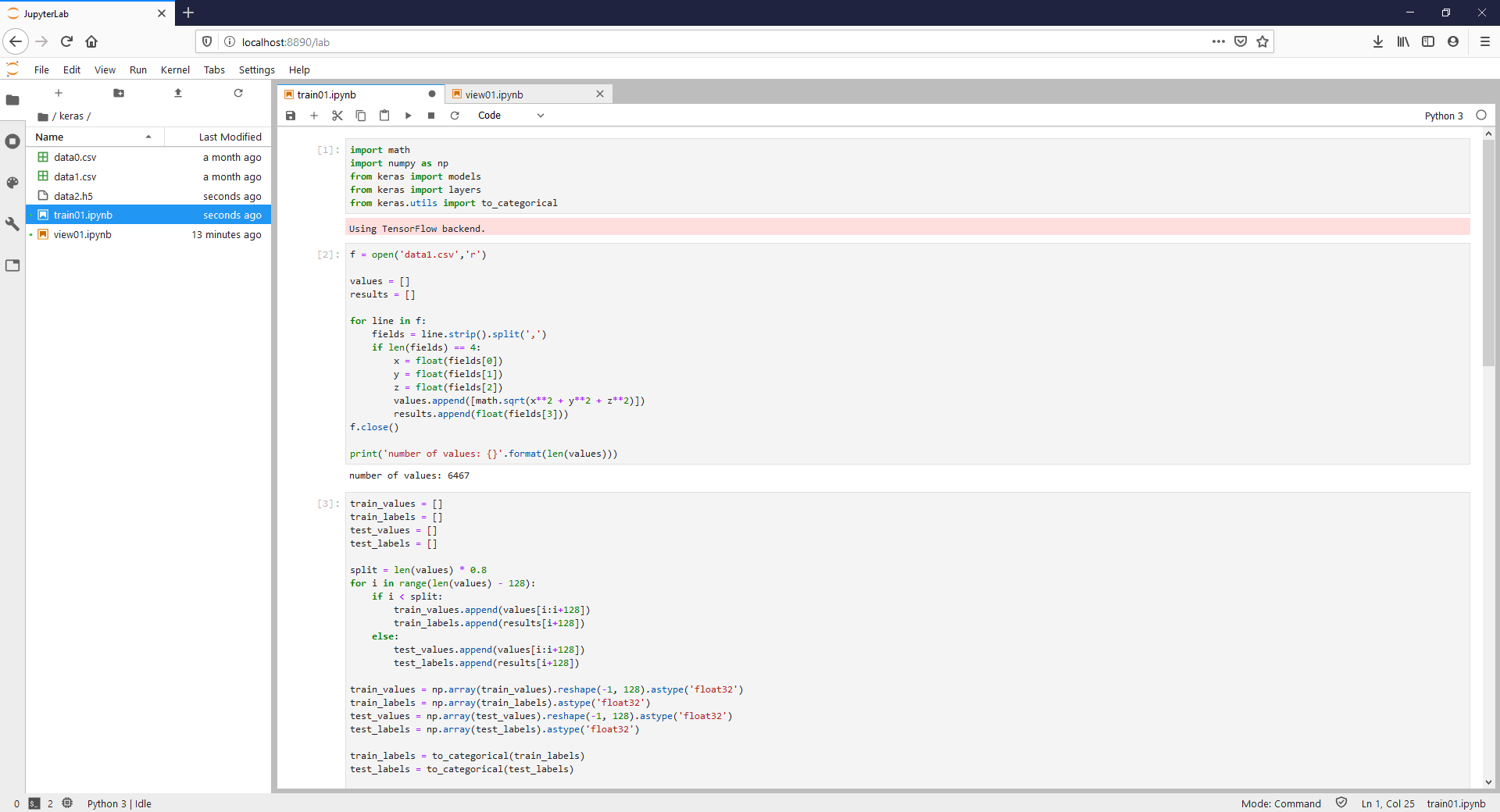
Nowy projekt JupyterLab
W JupyterLab nasz skrypt można podzielić na fragmenty, edytować i uruchamiać niezależnie. Dzięki temu jeśli np. dostroimy parametry sieci, nie musimy uruchamiać całego skryptu – wystarczy ponownie wykonać zmienioną część. To ogromne ułatwienie oraz oszczędność czasu.
Na początku mamy więc import używanych bibliotek:
import math
import numpy as np
from keras import models
from keras import layers
from keras.utils import to_categorical
Następnie wczytujemy dane treningowe i wykonujemy niezbędne obliczenia:
f = open('data1.csv','r')
values = []
results = []
for line in f:
fields = line.strip().split(',')
if len(fields) == 4:
x = float(fields[0])
y = float(fields[1])
z = float(fields[2])
values.append([math.sqrt(x**2 + y**2 + z**2)])
results.append(float(fields[3]))
f.close()
print('number of values: {}'.format(len(values)))
Teraz musimy zmienić trochę postać danych. Plik wejściowy to 6467 wierszy z wynikami. Do uczenia sieci chcemy jednak wykorzystać okna po 128 wyników, które dają na wyjściu odpowiedź, czy wykryto uczony wzorzec, czy nie.
Co więcej, dane powinniśmy podzielić na część treningową oraz testową – właściwie powinna być jeszcze trzecia część, przeznaczona do walidacji, jednak to tylko pierwszy, prosty przykład, więc tym razem mam tylko dwie części: trening i test.
train_values = []
train_labels = []
test_values = []
test_labels = []
split = len(values) * 0.8
for i in range(len(values) - 128):
if i < split:
train_values.append(values[i:i+128])
train_labels.append(results[i+128])
else:
test_values.append(values[i:i+128])
test_labels.append(results[i+128])
train_values = np.array(train_values).reshape(-1, 128).astype('float32')
train_labels = np.array(train_labels).astype('float32')
test_values = np.array(test_values).reshape(-1, 128).astype('float32')
test_labels = np.array(test_labels).astype('float32')
Muszę się przyznać do jeszcze jednego niedociągnięcia – dane powinny być również znormalizowane. Najpierw planowałem wykorzystać wszystkie składowe XYZ– wówczas normalizacja nie była konieczna. Przeliczenie przyspieszenia na wartość wypadkową wprowadziło stałą odpowiadającą przyspieszeniu ziemskiemu – a w skryptach już tego niestety nie uwzględniłem.
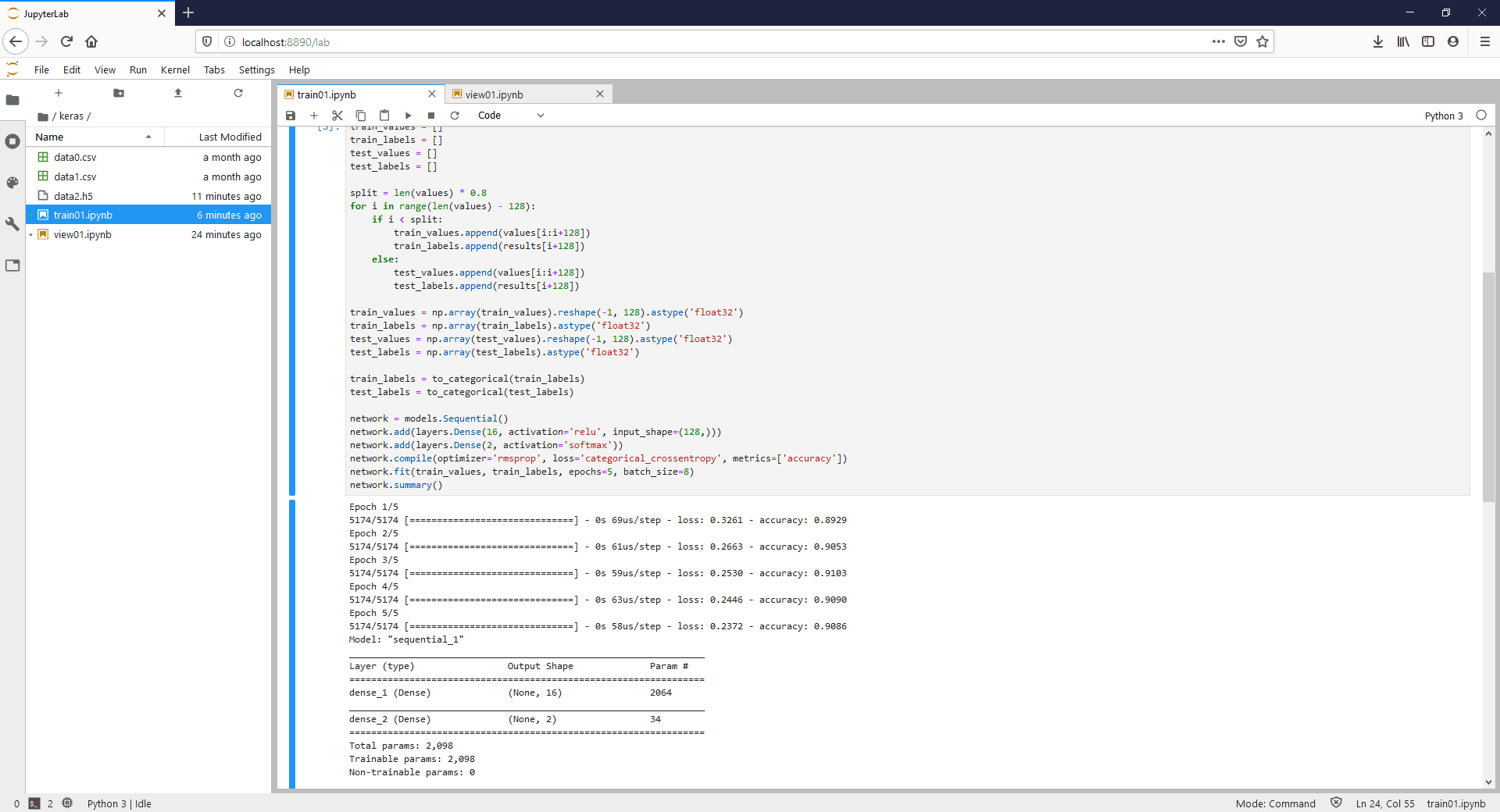
Po uruchomieniu kodu zobaczymy podsumowanie naszej sieci:
Wynik uczenia sieci
Jak widzimy, dokładność uczenia to 0,9086 – moglibyśmy uzyskać dużo lepsze rezultaty, tworząc bardziej wyszukaną sieć, ale przykład ten jest ogromnym uproszczeniem. Warto zwrócić uwagę na liczbę parametrów: 2064 dla pierwszej i 34 dla drugiej warstwy.
Musimy pamiętać, że te parametry trzeba będzie zapisać w pamięci mikrokontrolera – jednak niewiele ponad 2000 parametrów to mało i pewnie dałoby się uruchomić nawet na STM32F0.
Zanim zakończymy tworzenie sieci, jeszcze dwie ważne sprawy. Pierwsza to testowanie. Wynik, który widzieliśmy wcześniej, dotyczy danych, na których sieć była uczona – jednak ważniejsze jest, jak zachowa się z danymi, których jeszcze „nie widziała”.
Podczas przygotowywania danych 20% zostało zapisane w zmiennychtest_values i test_resultsi teraz mogą posłużyć do sprawdzenia, jak sieć radzi sobie z nowymi informacjami:
Sprawdzenie działania sieci zasilonej nowymi danymi
Uzyskujemy dokładność na poziomie 89,35%, czyli podobnie jak dla danych użytych do trenowania sieci. Ostatnia rzecz to zapisanie samej sieci do pliku, czyli wywołanie:
network.save('data2.h5')
Teraz mamy plik data2.h5, który jest gotowy do użycia z X-CUBE-AI.
Implementacja sieci neuronowej na STM32
Zostało ostatnie i najprzyjemniejsze, czyli napisanie końcowego programu. Jako punktu wyjścia używam programu w wersji wykorzystanej wcześniej do zbierania danych. Jest w nim już praktycznie wszystko, co potrzebne, czyli konfiguracja modułów peryferyjnych oraz odczyt danych z akcelerometru.
Program bazowy użyty w dalszej części
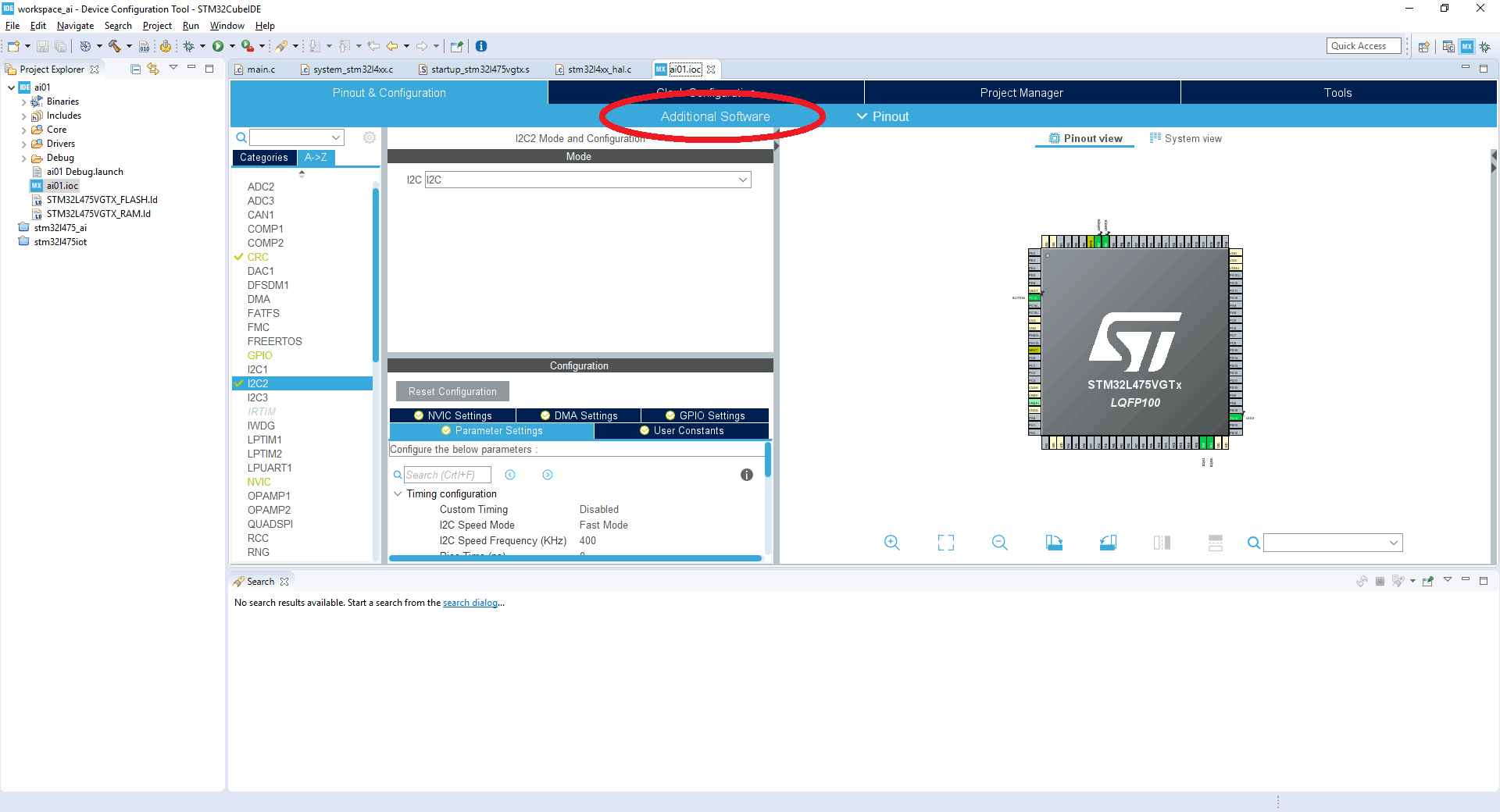
Przechodzimy do widoku CubeMX i odnajdujemy (słabo widoczny) przycisk Additional Software:
Dodawanie nowych modułów do projektu
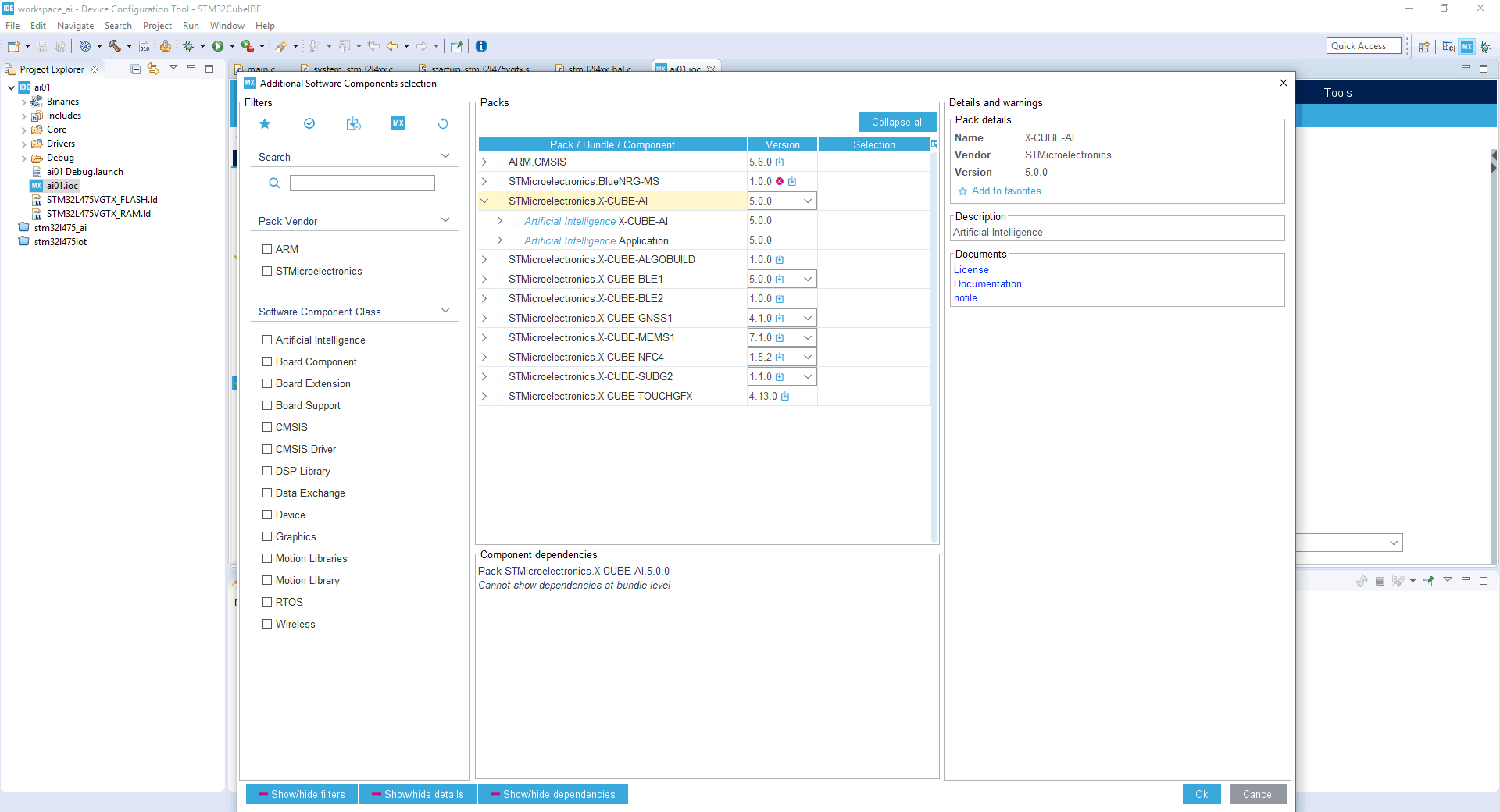
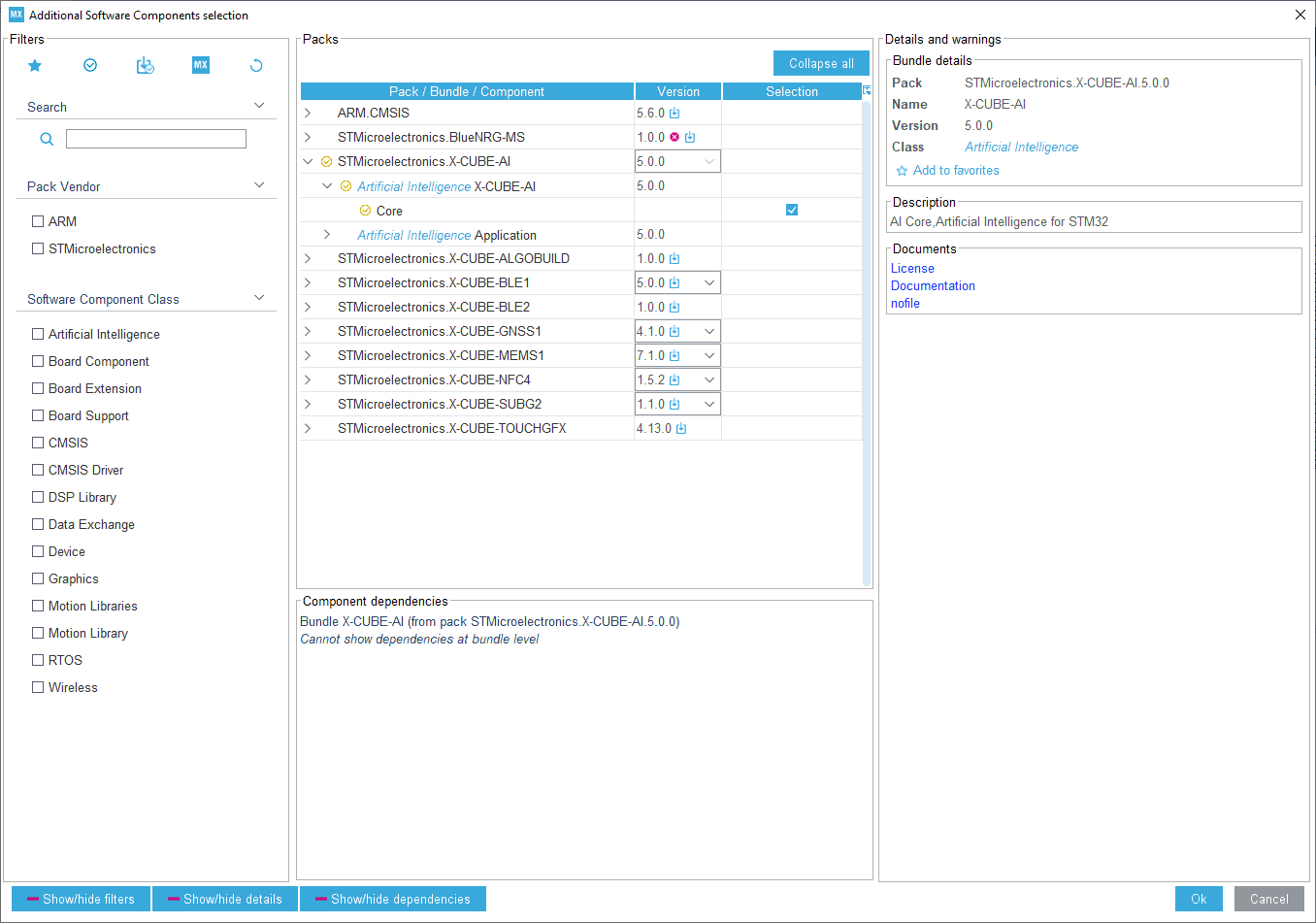
Po jego naciśnięciu zobaczymy okno pozwalające na dodawanie modułów do naszego projektu. Nas interesuje tym razem moduł STMicroelectronics.X-CUBE-AI. Jeśli wcześniej tego nie zrobiliśmy, to musimy najpierw ten moduł pobrać i zainstalować. Niezbędne opcje będą widoczne po prawej stronie.
Informacja na temat nowego modułu
Po instalacji modułu wystarczy zaznaczyć checkbox i użyć podstawowej funkcjonalności, czyli Core.
Wybór odpowiedniej funkcjonalności modułu
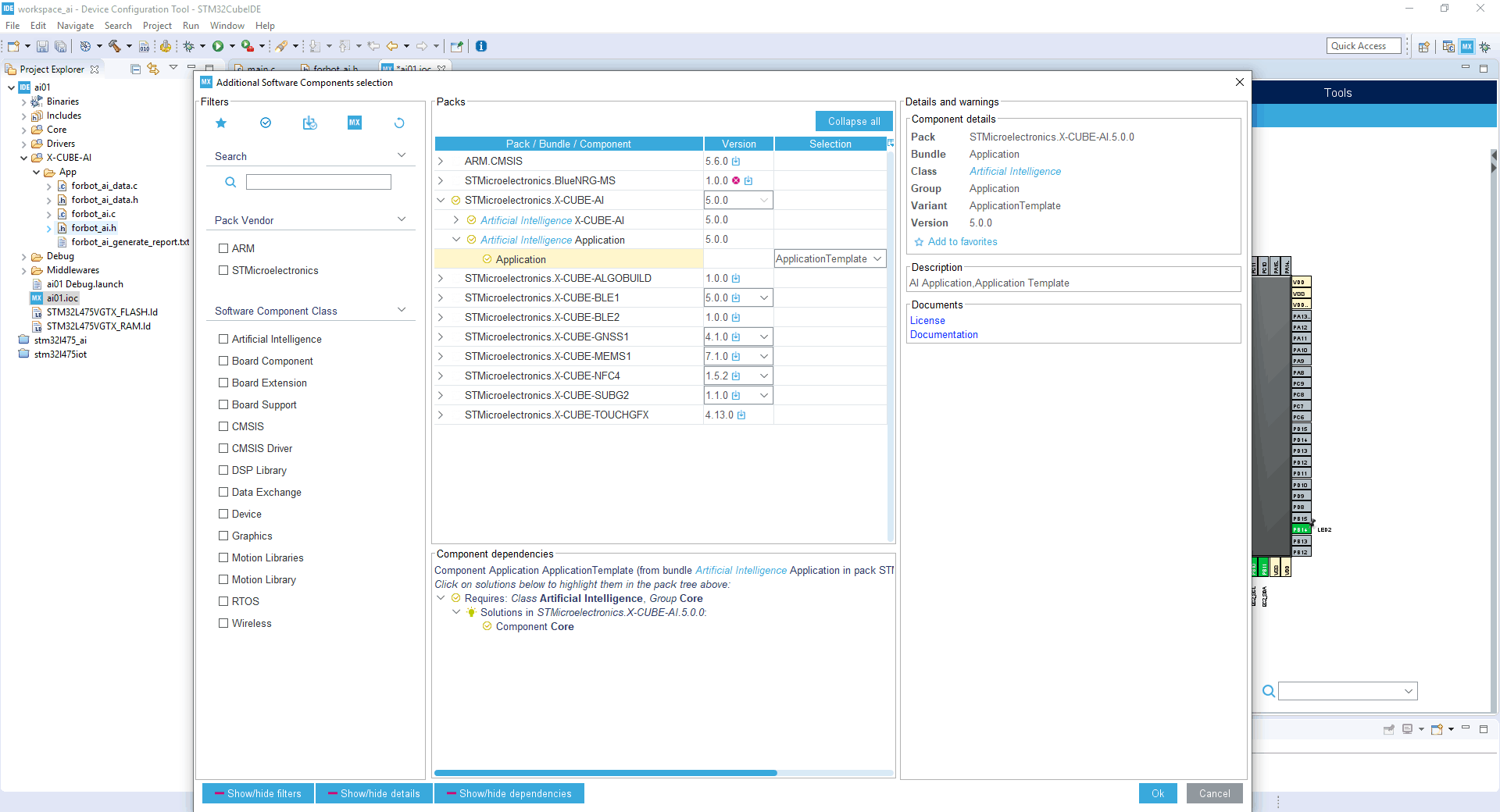
Gdybyśmy planowali wykorzystanie sieci neuronowej w poważniejszym programie, takie ustawienie byłoby chyba najlepszą opcją. Jednak na potrzeby nauki możemy wykorzystać gotowiec i dodać jeszcze opcję Application Template.
Dodawanie kolejnego modułu
Jakość kodu, który zostanie dodany jako „template”, jest delikatnie mówiąc… niezbyt imponująca. Dlatego napisałem, że lepiej chyba nie używać go w poważniejszych zastosowaniach – ale do nauki to bardzo wygodne rozwiązanie. Teraz możemy wrócić do głównego widoku, CubeMX, i odszukać moduł STMicroelectronics.X-CUBE-AI (znajdziemy go w kategorii Additional Software).
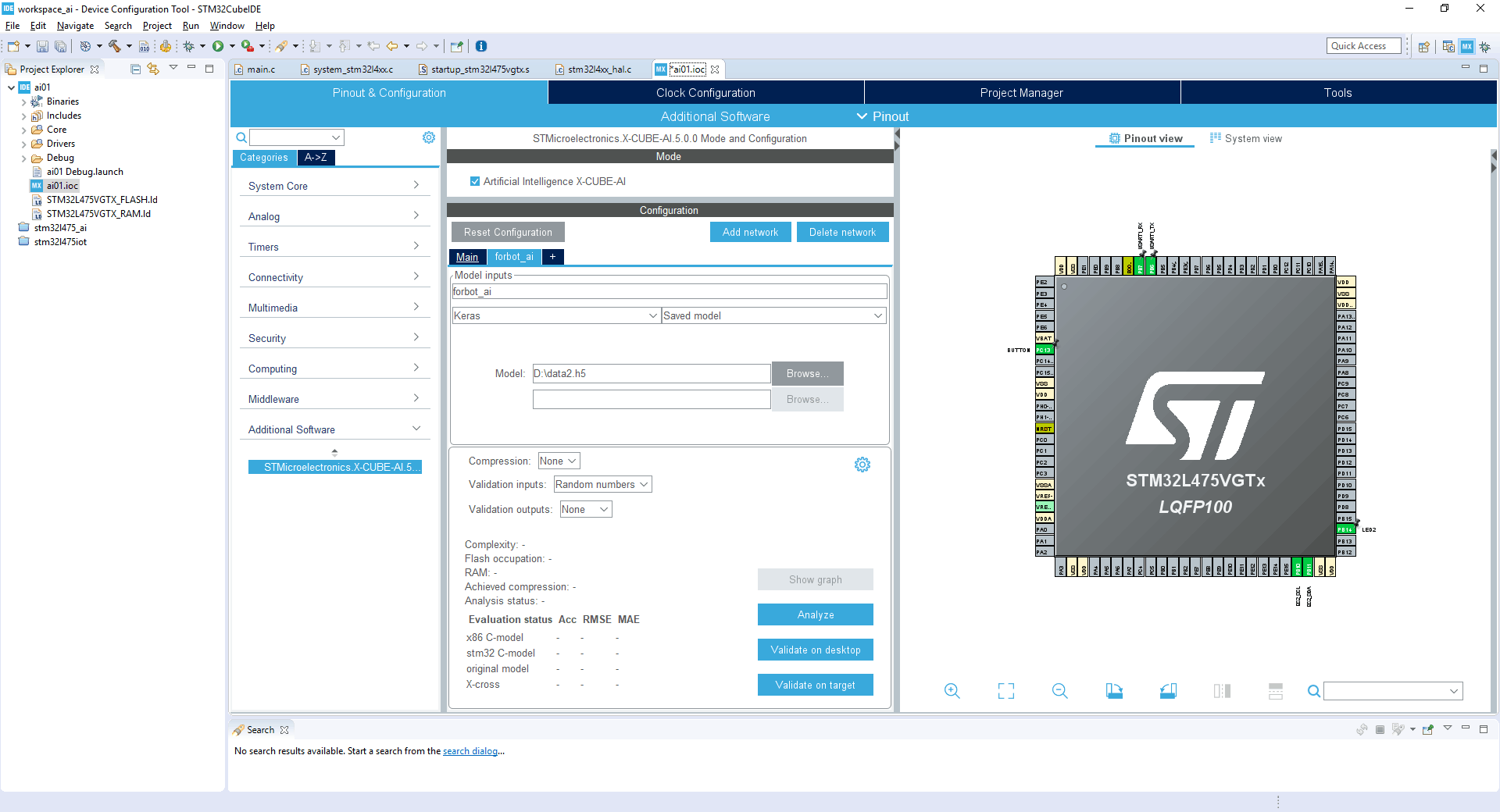
Korzystanie z nowego modułu
W środkowej części okna widzimy konfigurację modułu, naciskamy przycisk-zakładkę z symbolem +, po czym dodajemy naszą sieć. Domyślna nazwa to „network”, ale warto ją zmienić na coś bardziej opisowego – ja wybrałem „forbot_ai”. Następnie wybieramy typ modelu Keras i wskazujemy sam model, czyli nasz plik data2.h5, który utworzyliśmy wcześniej. Gdy wszystko jest już gotowe, możemy nacisnąć przycisk Analyze i poczekać, aż X-CUBE-AI sprawdzi, czy nasza sieć pasuje do wybranego mikrokontrolera.
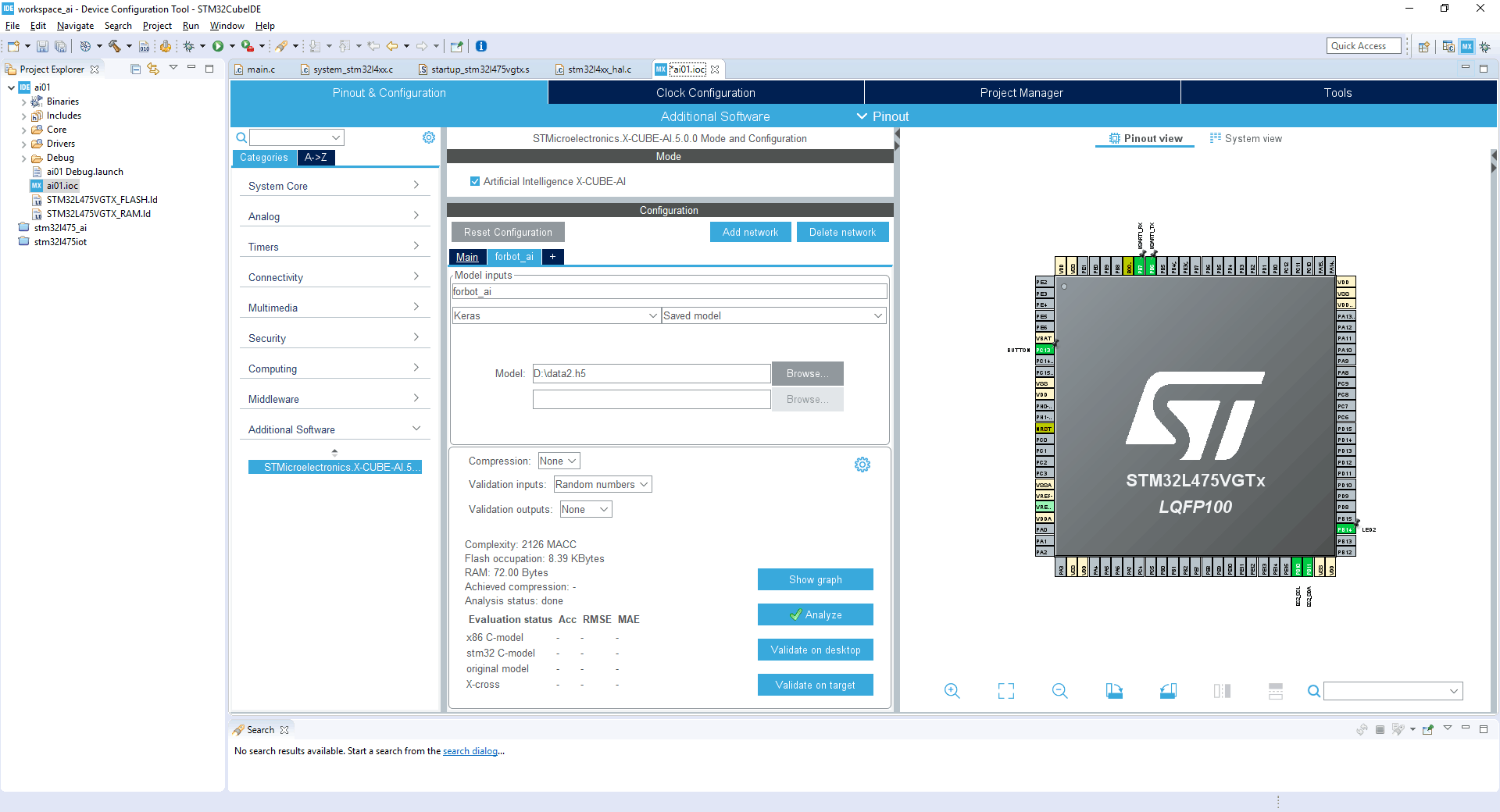
Wynik działania nowego modułu
Jak widzimy, cała skomplikowana sieć wykorzystuje 8,39 kB pamięci flash oraz 72 B RAM-u. To bardzo mało jak dla naszego STM32L475, więc nawet znacznie słabiej wyposażone mikrokontrolery mogą skorzystać z możliwości, jakie dają sieci neuronowe.
W przypadku większych sieci możemy wykorzystać jeszcze opcję kompresji.
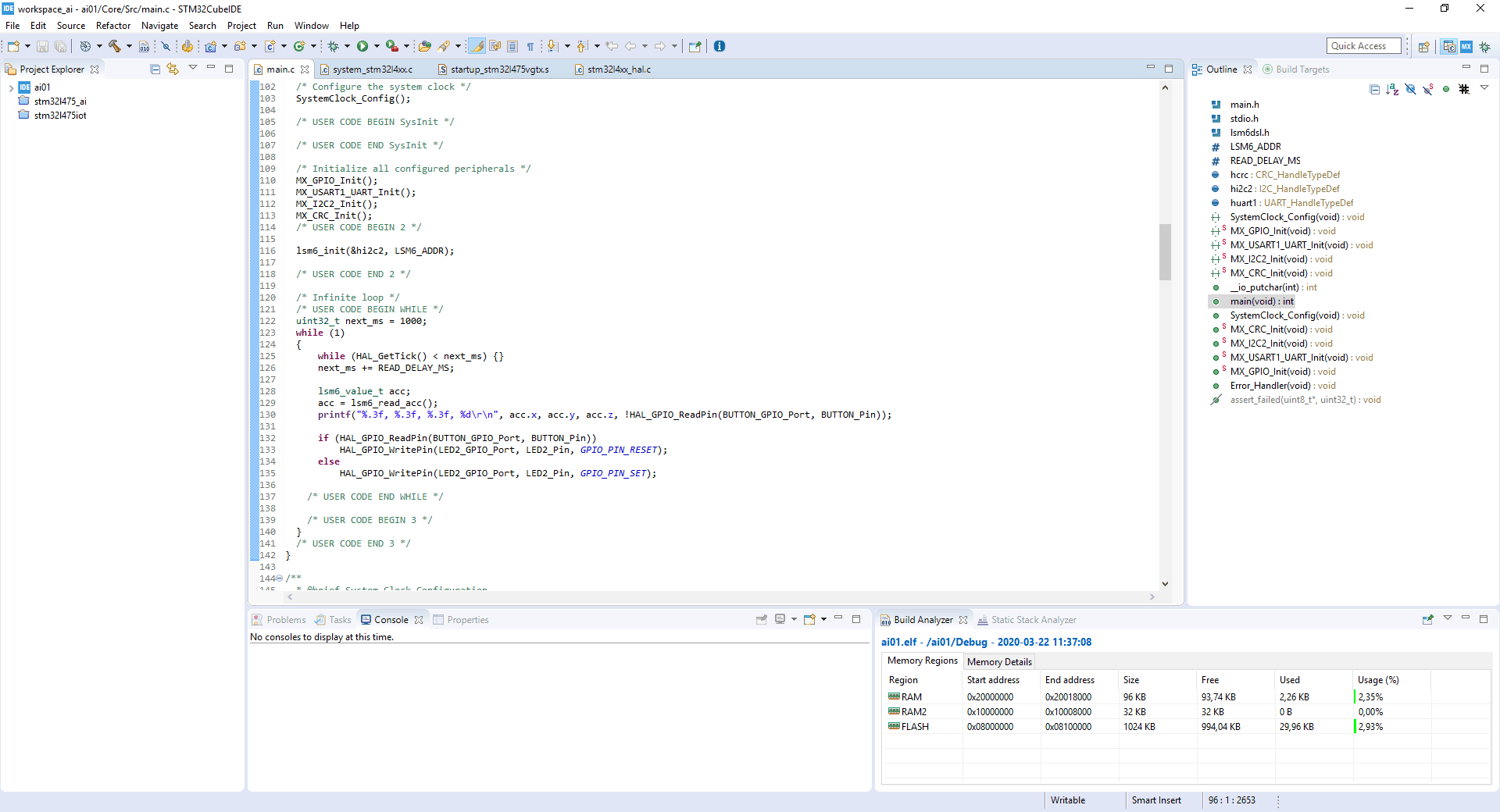
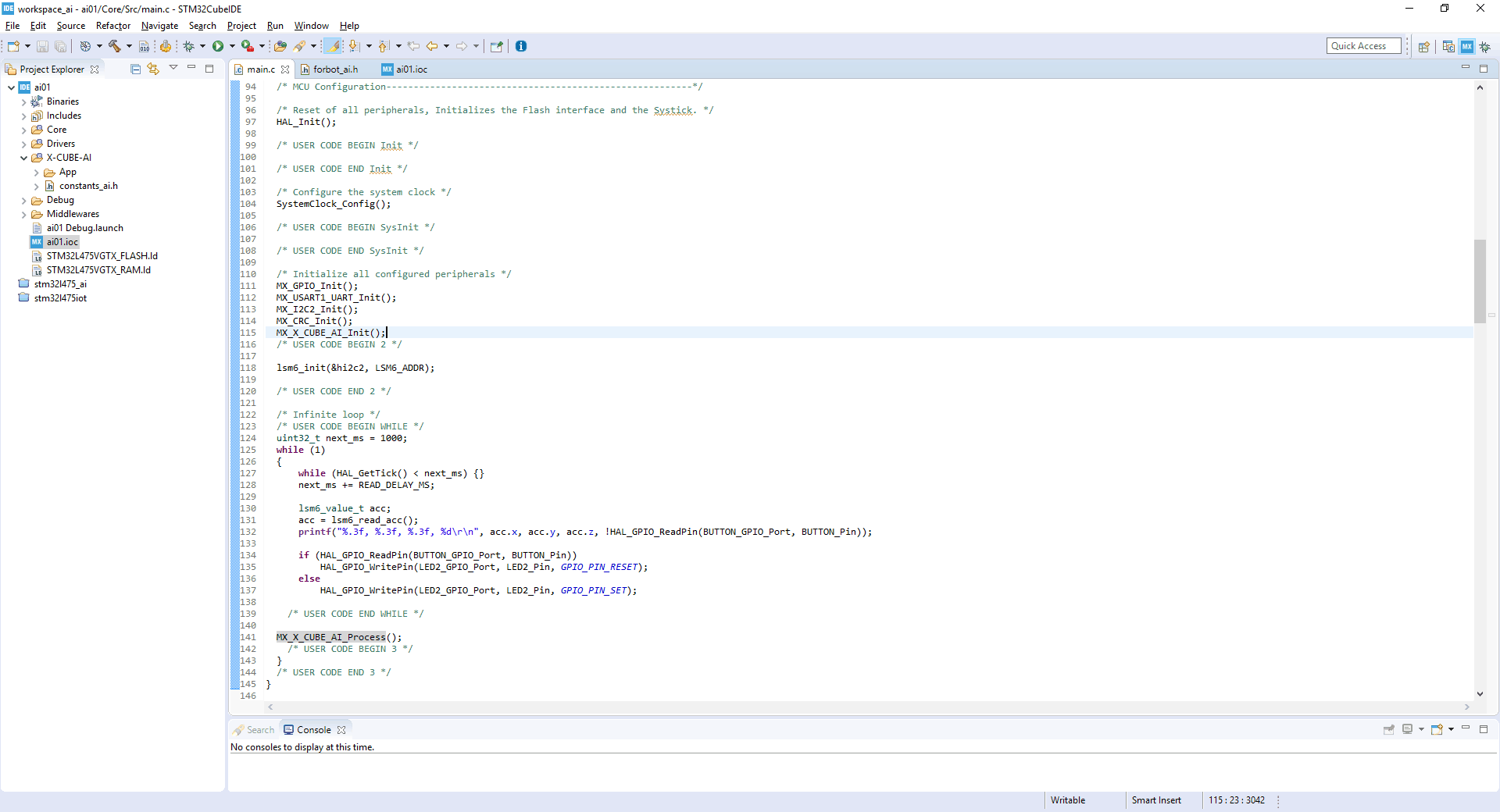
Po zapisaniu projektu i wygenerowaniu kodu zobaczymy dwie ważne zmiany w pliku main.c. Przed pętlą główną pojawi się MX_X_CUBE_AI_Init(), a w samej pętli znajdziemy MX_X_CUBE_AI_Process().
Wygenerowany program, który wykorzystuje sieć neuronową
Inicjalizacja nie będzie nas interesować, możemy zostawić wygenerowany kod bez zmian. Warto natomiast zapoznać się z treścią funkcji MX_X_CUBE_AI_Process().
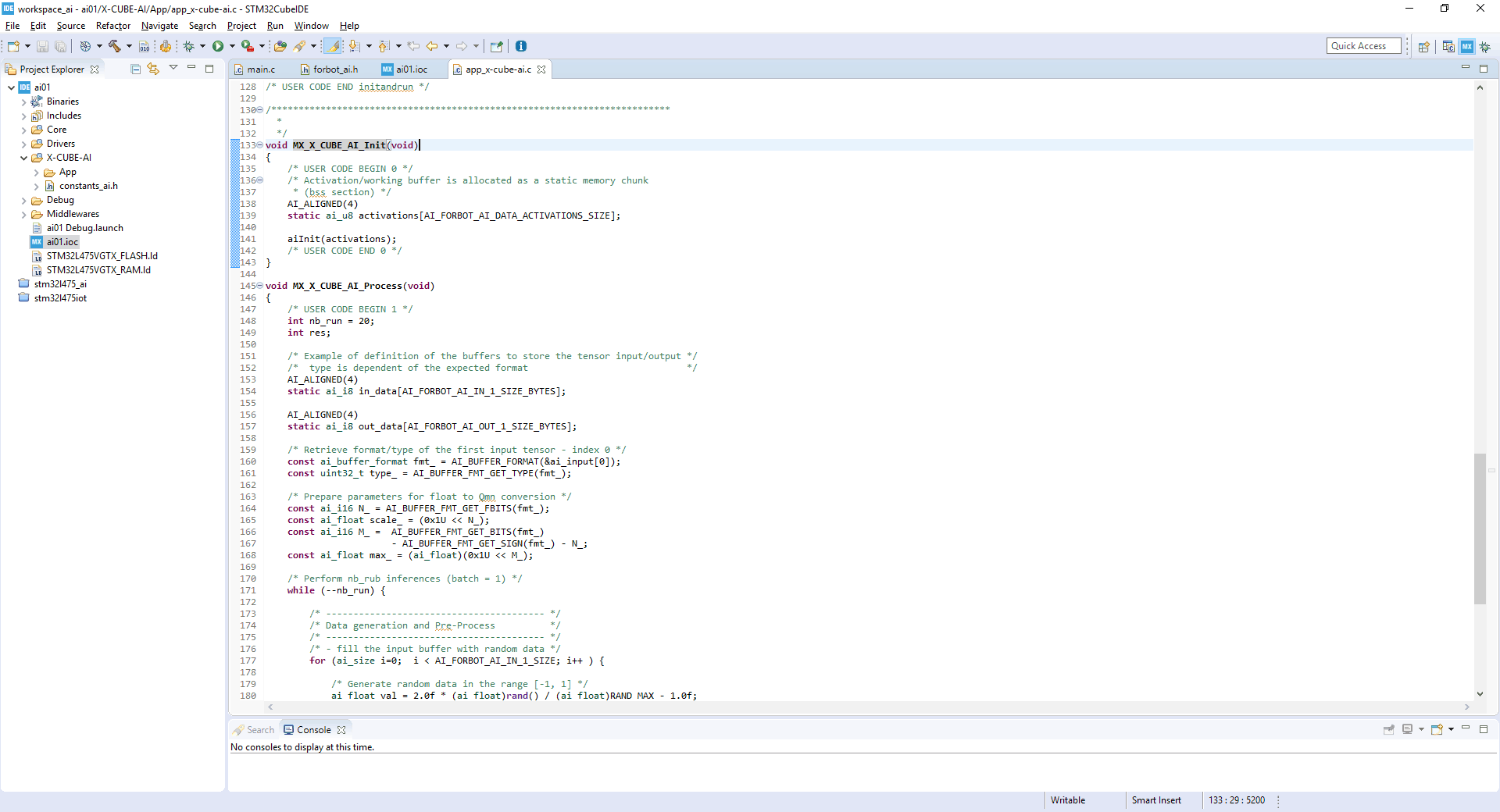
Funkcja, która nas interesuje
Kod, który w niej znajdziemy, może przyprawić o palpitację serca, ale na szczęście to tylko przykład, chociaż chyba niezbyt udany. Możemy więc spróbować zrozumieć, o co w tym kodzie chodzi – i szybko odkryjemy, że jedyne, co jest istotne, to wywołanie funkcji aiRun(), która przyjmuje dwa parametry: pierwszy to tablica z danymi wejściowymi dla sieci, a drugi to tablica z wynikami.
Warto jeszcze odszukać, jakie są wymiary tych tablic: AI_FORBOT_AI_IN_1_SIZE ma wartość 128; jest to wielkość zdefiniowana podczas trenowania sieci, właśnie tyle danych musimy podać na wejście. Wielkość danych wynikowych znajdziemy w stałej AI_FORBOT_AI_OUT_1_SIZE, która ma wartość 2. Przykładowy kod wykonuje mnóstwo dziwnych operacji na typach danych, ale w rzeczywistości dane wejściowe i wyjściowe to zwykłe floaty.
Możemy więc skasować wszystko, co automat nam wygenerował, i napisać pierwszy kod:
void MX_X_CUBE_AI_Process(void)
{
/* USER CODE BEGIN 1 */
float nn_input[AI_FORBOT_AI_IN_1_SIZE];
float nn_output[AI_FORBOT_AI_OUT_1_SIZE];
aiRun(nn_input, nn_output);
/* USER CODE END 1 */
}
Taki program oczywiście nic nie robi ani nie działa poprawnie, ale umieściłem go, aby pokazać, jak łatwe jest używanie sieci neuronowej. Musimy wypełnić tablicę nn_inputdanymi do przetworzenia, następnie wywołujemy aiRun() i w nn_output mamy wyniki. Poniżej wstawiam już pełny kod:
Tablica nn_input jest definiowana jako statyczna, aby zachować historię pomiarów. Pomiary są wykonywane co 20 ms, stąd czekanie w pętli while. Następnie odczytywana jest wartość przyspieszeń z akcelerometru. Wyniki przechowywane w tablicynn_inputsą przesuwane o jedną pozycję, a najnowszy pomiar dodawany jest na końcu.
Następnie wywoływana jest funkcja aiRun() i przetwarzane są wyniki. Tablica nn_ouputzawiera dwie wartości – pierwsza pozycja to prawdopodobieństwo, że nie wykryto gestu; druga – że go wykryto. Ich suma wynosi 1, więc wystarczyłaby jedna wartość, ale tak była trenowana sieć. Na podstawie obliczonego prawdopodobieństwa gaszona lub zapalana jest dioda LED.
Poniżej efekt działania programu (z drobną poprawką, o której za moment):
Uczenie sieci wymaga dużej ilości danych treningowych – w sumie im więcej, tym lepiej. Niestety przykładowa sieć była trenowana na bardzo małej próbce. Efekty były i tak bardzo dobre, ale po wykryciu gestu pojawiały się pewne „zakłócenia”. Po pierwsze czas zapalenia diody był bardzo różny, po drugie czasem dioda zapalała się kilka razy.
Oczywiście najlepiej byłoby spędzić więcej czasu, ucząc sieć, ale ja zastosowałem pewne obejście. W programie po wykryciu „machania” płytką dioda jest zapalana na 1 s – sieć mogłaby to robić sama, ale o wiele łatwiej było zmienić program w ten prosty (i skuteczny) sposób.
Co o tym sądzisz? Oceń ten wpis:
Średnia ocena 4.9 / 5. Głosów łącznie: 42
Nikt jeszcze nie głosował, bądź pierwszy!
Artykuł nie był pomocny? Jak możemy go poprawić? Wpisz swoje sugestie poniżej. Jeśli masz pytanie to zadaj je w komentarzu - ten formularz jest anonimowy, nie będziemy mogli Ci odpowiedzieć!
Podsumowanie
Projekt opisany w tych artykułach miał być jedynie pierwszym krokiem – taką próbą użycia X-CUBE-AI. Planowałem poprawić opisywane przykłady, dodać bardziej rozbudowany projekt z innym czujnikiem oraz wykorzystać bardziej zaawansowaną topologię sieci. Ale jak to z planami często bywa – pozostały niezrealizowane. Mam tylko nadzieję, że opisane tutaj możliwości zachęcą Czytelników do eksperymentowania ze sztuczną inteligencją i do dzielenia się swoimi doświadczeniami na forum!
Chyba wszyscy entuzjaści elektroniki słyszeli już o mikrokontrolerach STM32. W naszych kursach opisaliśmy podstawy F1 i F4, dzięki czemu... Czytaj dalej »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.



























Trwa ładowanie komentarzy...