Kursy • Poradniki • Inspirujące DIY • Forum





Wpisy z tagiem: profiler
Sterowanie robotem mobilnym klasy (2,0)
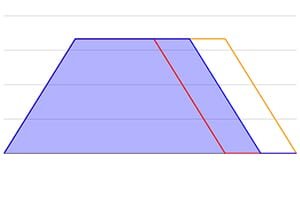
Problem sterowania robota wyposażonego w dwukołowy napęd różnicowy, nazywanego też robotem mobilnym klasy (2,0), prawdopodobnie dosięgnie z czasem większość osób zajmujących się robotyką amatorską.
Do tej klasy robotów zalicza się bowiem dużą cześć tworzonych konstrukcji: linefollowery, micromouse i wszelkiej wielkości sumo.
Kursy elektroniki i programowania
Popularne
Nowe posty z forum
Artykuły i projekty DIY czytelników






Newsletter - odbierz ściągi PDF
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.
Warto przeczytać