Pan Tadeusz Mikołajczyk, emerytowany starszy wykładowca Akademii Górniczo Hutniczej (AGH), jest dowodem na to, że TERRINet to doskonała okazja także dla starszych naukowców. Pan Tadeusz zgłosił się do TERRINet w celu określenia możliwości przeniesienia opracowanego przez siebie inteligentnego systemu do obróbki. Celem projektu było zaimplementowanie algorytmu na nowoczesnym robocie RX-90, który jest wyposażony m.in. w kamerę Intel® RealSense ™ Depth Camera D435.
Stanowisko testowe z robotami Staubli RX-90
Głównym wkładem naukowym jego systemu jest zdolność robota do automatycznego rozpoznawania i oceny powierzchni o nieznanym kształcie do zrobotyzowanej obróbki poprzez wdrożenie systemu wizyjnego. Robot Staubli RX-90 jest oferowany przez partnera TERRINet - Robotic Vision and Control Group (GRVC) na Uniwersytecie w Sewilli (Hiszpania), jednego z wiodących specjalistów w zakresie robotyki wizyjnej i lotniczej.
Zrobotyzowana obróbka z użyciem systemów wizyjnych
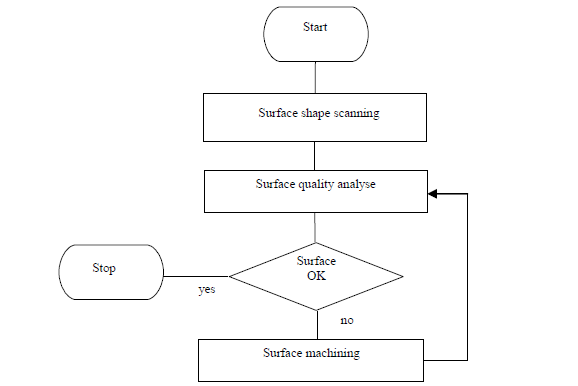
Inteligentny system do zrobotyzowanej obróbki nieznanych kształtów został wcześniej opracowany dla robota przemysłowego IRb60, który został wyposażony w specjalny interfejs do komputerowego sterowania i odbierania sygnałów z różnych czujników. Celem opracowanego systemu była możliwość automatycznego określenia obszaru obróbki i oceny chropowatości powierzchni o nieznanym kształcie.
Koncepcja systemu do zrobotyzowanej obróbki nieznanych kształtów z analizą stanu powierzchni
Rozpoznawanie kształtu powierzchni zostało przeprowadzone za pomocą 3 metod przetwarzania przy użyciu kamery. Pierwszą z nich była analiza bezpośredniego obrazu obiektu w świetle widzialnym, w celu zweryfikowania użyteczności kamery znajdującej się na robocie, poprzez automatyczne wyznaczenie granic obszaru roboczego.
Automatyczne określanie obszaru obróbki przez analiza granic w oprogramowaniu RoboView
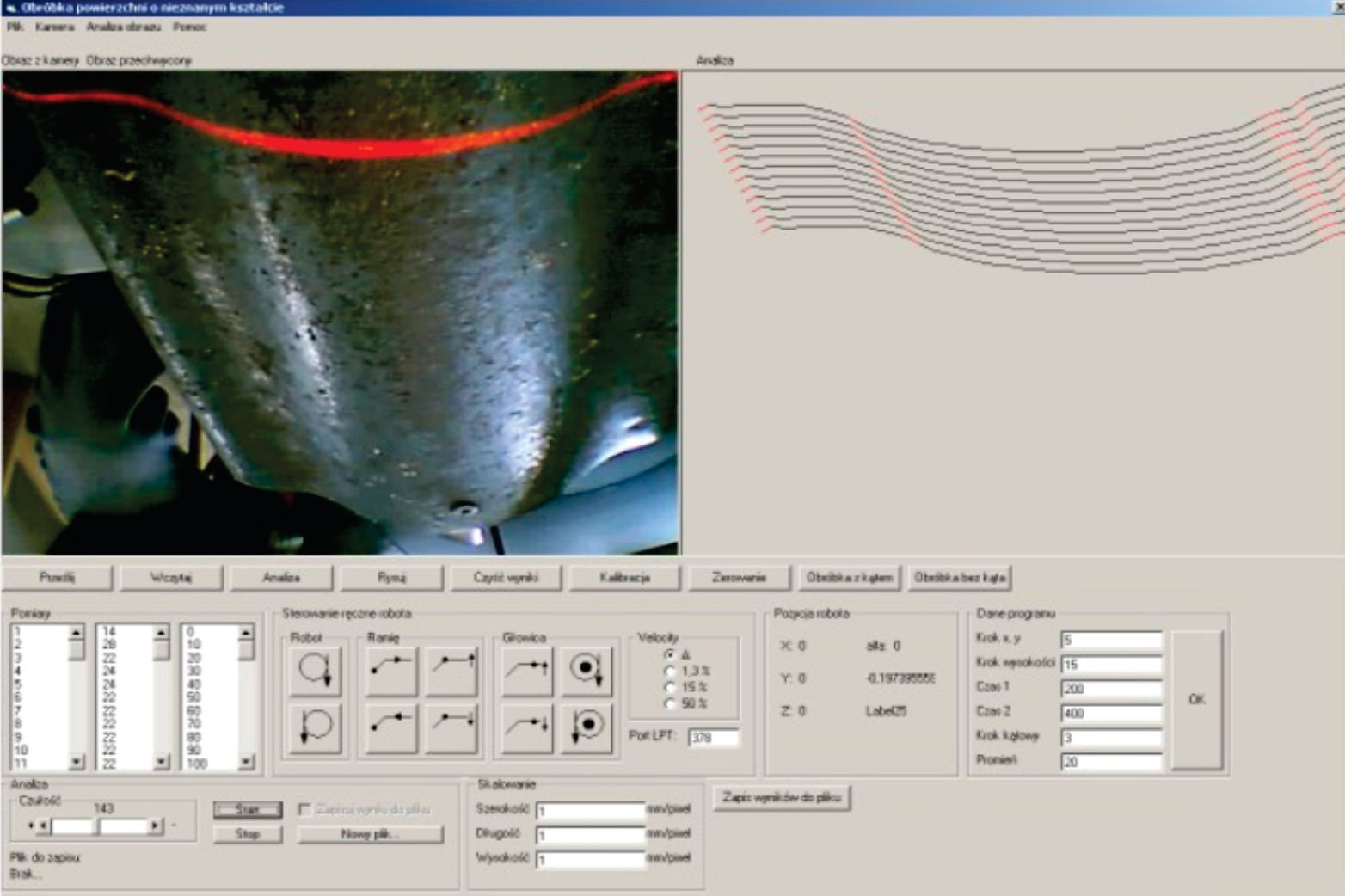
Druga metoda, wykorzystywała światło długości 650 nm do określenia współrzędnych obszaru obróbki prostopadle do powierzchni roboczej. Badania były wykonywane za pomocą lasera oraz kamery, które zamontowano na specjalnym uchwycie.
Analiza kształtu powierzchni w oprogramowaniu RoboScan
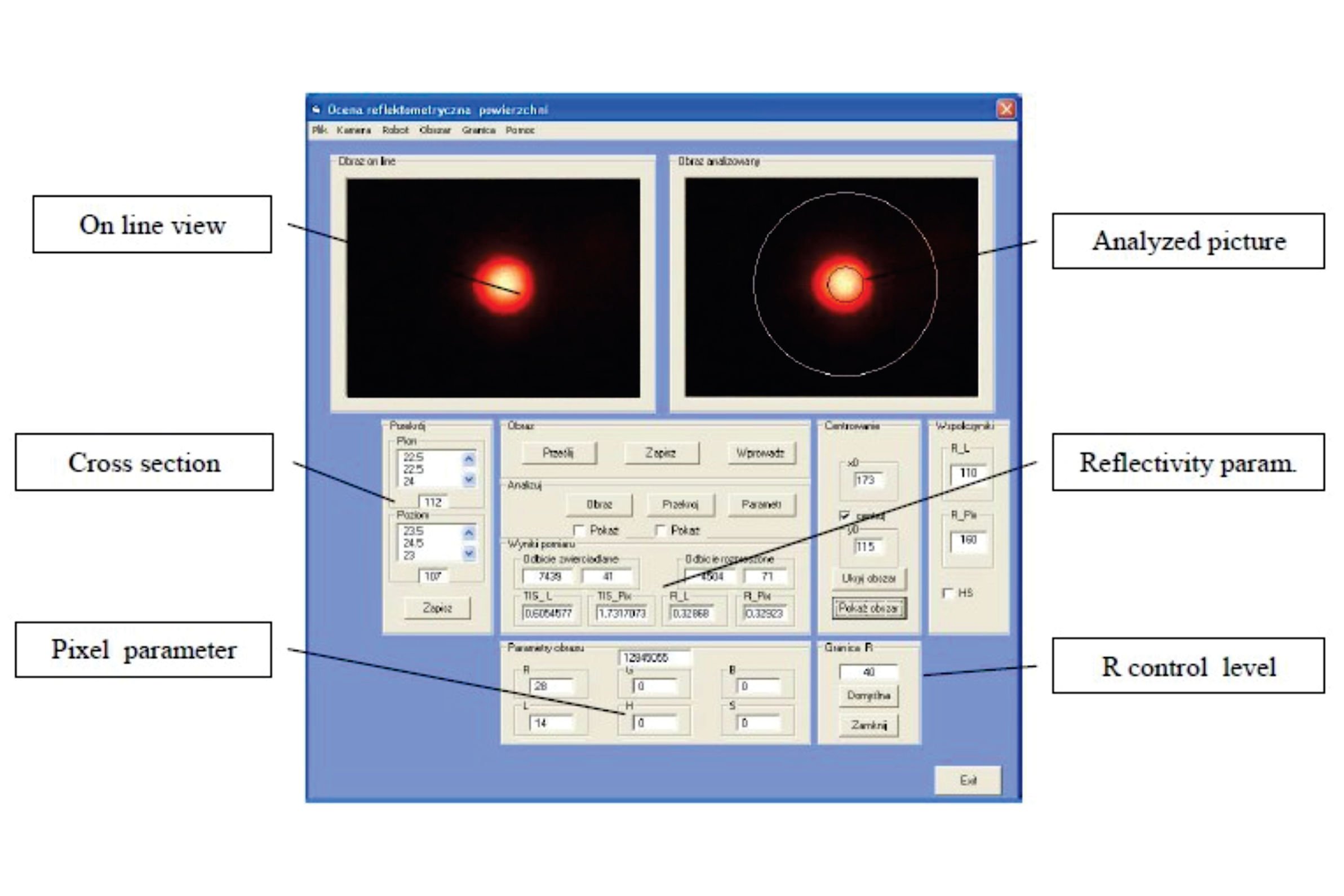
Ostatnia metoda badała rozproszenie światła, które powstało w wyniku odbicia wiązki laserowej od rzeczywistej powierzchni, dzięki czemu możliwa była aktywna ocena jej jakości. Program sterujący procesem badania materiału został opracowany w VB6 (Visual Basic 6).
Analiza charakterystyki strumienia powierzchni po odbiciu w programie RoboRefl
Przeniesienie systemu na platformę Staubli RX-90
W ramach TERRINet maszynowe rozpoznawanie kształtu powierzchni oraz automatyzację trajektorii procesu obróbki przeprowadzono w programie RoboView. Wdrożenie elementów opracowanego inteligentnego systemu było możliwe, gdyż robot Staubli RX-90 posiada otwarty system sterowania opracowany dla Ubuntu.
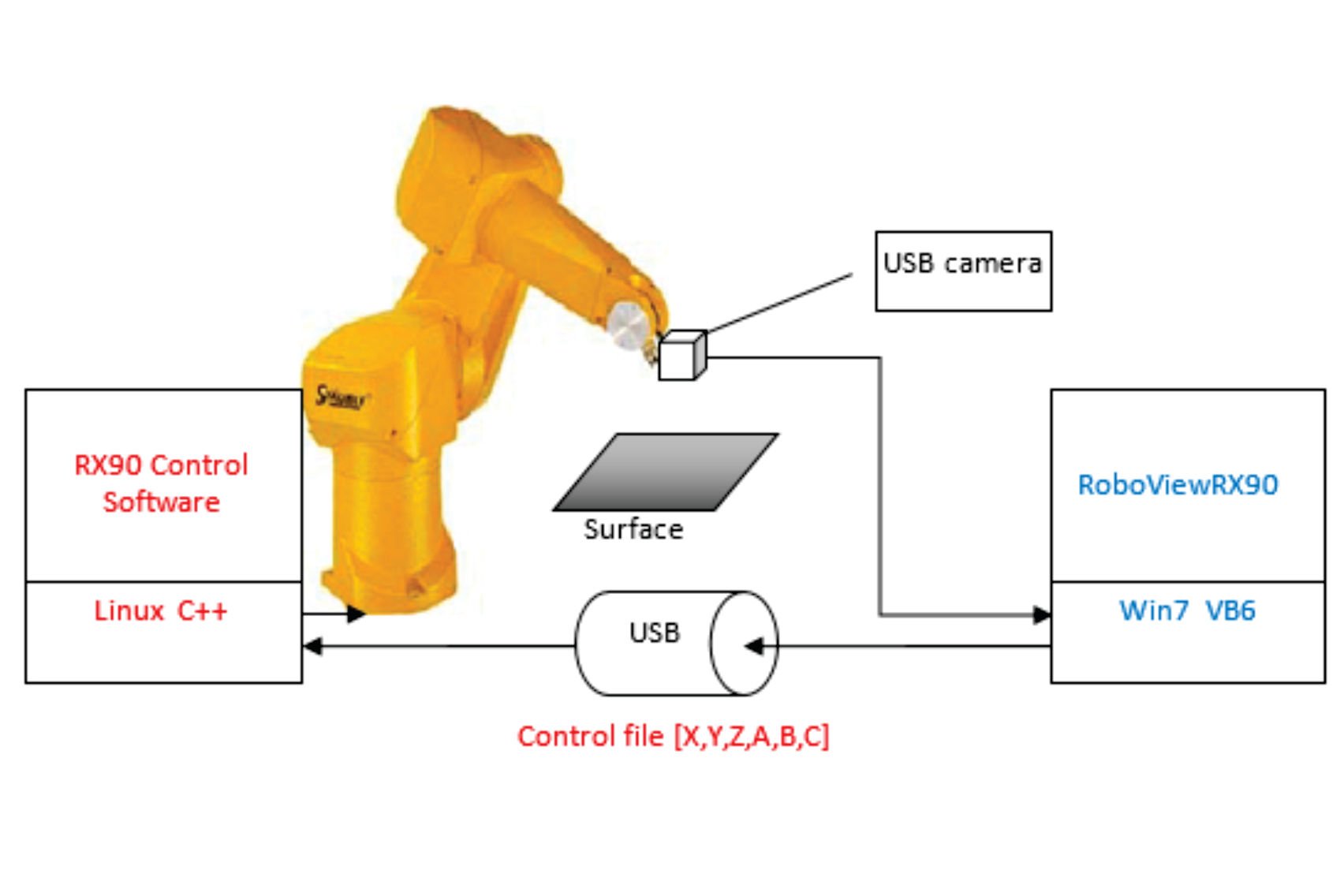
Głównym celem eksperymentu na robocie RX-90 firmy Staubli było przygotowanie pliku offline do sterowania robotem w oparciu o przetworzony obraz zbadanej powierzchni płaskiej (opracowany w RoboViewRX-90). Oprogramowanie zostało wygenerowane na podstawie analizy obrazu parametrów X, Y, Z kodu trajektorii robota oraz wartości A, B, C obrotu głowicy. W wyniku tego został wyodrębniony plik sterujący, który przeniesiono na dysk USB w celu sterowania ruchem robota.
Schemat idei opracowanej w projekcie TERRINet - system do przygotowania kontroli robota RX-90 w trybie offline, na podstawie analizy obrazu obrabianej powierzchni w programie RoboViewRX-90
Testy przeprowadzone na RX-90 potwierdziły możliwość transferu inteligentnego systemu również w nowoczesnym środowisku przemysłowym. W wyniku przeprowadzonego eksperymentu opracowano dokumentację geometrii głowicy, która określa możliwości mocowania czujników i narzędzia do rozpoznawania obrabianych powierzchni. Projekt zainicjował dyskusje i badania nad technicznymi możliwościami integracji robotów przemysłowych wyposażonych w narzędzia wizyjne do obróbki powierzchniowej prowadzonej przez inteligentne systemy rozpoznawania obszaru.
Możliwość współpracy z ekspertami od robotyki
Testy realizowane w ramach TERRINet pozwolił Panu Tadeuszowi na świeże spojrzenie na jego projekt. Co jeszcze ważniejsze, pozwoliły mu na współpracę z jedną z wiodących grup ekspertów ds. systemów wizyjnych. Przy okazji możliwe było zdobycie dużej wiedzy na temat platformy Staubli i innowacyjnych sposobów wykorzystania technologii Intel® RealSense ™ Depth Camera D435.
Szukasz możliwości udoskonalenia swojego pomysłu badawczego? Dzięki mechanizmowi TERRINet "FIRST COME, FIRST SERVE" możesz ubiegać się o w pełni opłacony dostęp (w tym koszty podróży i zakwaterowania) do ponad 100 najlepszych laboratoriów robotycznych w Europie. Więcej informacji znaleźć można na stronie projektu TERRINet.
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.























Trwa ładowanie komentarzy...