Jednym z najczęściej wykorzystywanych typów silników w mechatronice są silniki krokowe. Znają je bardzo dobrze posiadacze drukarek 3D oraz obrabiarek CNC. Jak działają silniki krokowe?
Często rywalizują one z innymi typami napędów, warto więc zacząć od odpowiedzenia na pytanie, jak zbudowane są silniki krokowe.
Silniki prądu stałego mogą przybierać niemal nieograniczone kształty i rozmiary, mogą się także różnić nieco zasadą działania. W każdym silniku elektrycznym wykorzystuje się jednak to samo zjawisko fizyczne – energia elektryczna zamieniana jest na energię mechaniczną. Prąd płynący przez uzwojenia generuje pole elektromagnetyczne, które następnie oddziałuje z ruchomą lub nieruchomą częścią silnika. Szczegóły tego zjawiska omówiliśmy w artykule opisującym, jak działają szczotkowe silniki DC.
Miniaturowe silniki krokowe w popularnej obudowie
Silniki krokowe (zwane też czasami skokowymi, zwłaszcza za naszą wschodnią granicą) nie są wyjątkiem, choć ich budowa i preferowane zastosowania kategoryzują je jako osobną grupę. Warto wiedzieć, jak działają i co je odróżnia, bo czasem – na pierwszy rzut oka – mogą się wydawać bliźniaczo podobne do silników innych typów.
Warto pamiętać, że nieprawidłowo dobrany rodzaj sterowania może nie tylko zniszczyć elektronikę sterującą, ale także sam silnik!
Czym jest silnik krokowy? Skrót informacji
Silnik krokowy to silnik elektryczny; zamienia płynący przez niego prąd na ruch obrotowy. Działa na prąd stały i może mieć niemal dowolną wielkość i dowolny moment obrotowy. Silnik krokowy, jak sama nazwa wskazuje, po podłączeniu zasilania do jednego z jego uzwojeń wykonuje on „krok”, zamiast stale się obracać. Każdy krok to obrót o ściśle określony przez producenta silnika kąt, np. 1,2°. Silnik krokowy nie posiada szczotek, więc należy do grupy silników bezszczotkowych prądu stałego.
Jak działa silnik krokowy?
Silnik krokowy nie zacznie się obracać, gdy po prostu podłączymy do niego zasilanie. Wymagane jest przełączanie zasilania w jego uzwojeniach w odpowiedniej kolejności. Każde z takich przełączeń spowoduje obrót tylko o pewien kąt (wspomniany wcześniej krok).
Jak zbudowany jest silnik krokowy?
W odróżnieniu od szczotkowych silników prądu stałego w silniku krokowym ferromagnetyk został umieszczony w wirniku, a uzwojenia – na stojanie. Rozwiązanie takie pozwoliło całkowicie zrezygnować z mechanicznego komutatora. Wprawienie silnika w ruch odbywa się poprzez sekwencyjne przełączanie zasilania kolejnych uzwojeń.
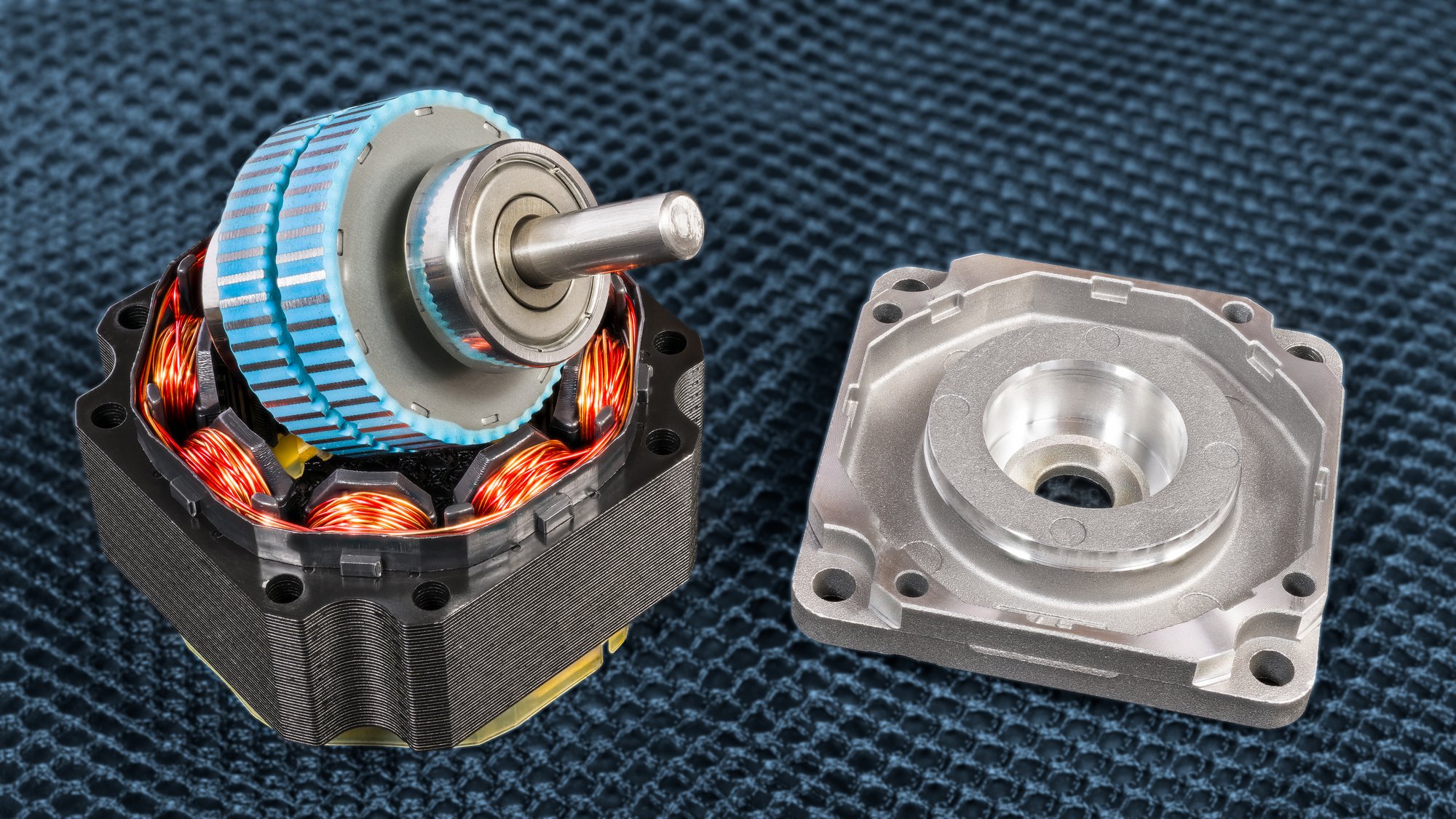
Wnętrze przykładowego silnika krokowego – widać uzwojenia umieszczone na stojanie
W silnikach z magnesem trwałym uzwojenia bezpośrednio oddziałują na bieguny wirnika, który składa się z magnesów. Po zasileniu jednego uzwojenia na wirnik działa siła pochodząca od wytworzonego pola magnetycznego, obracająca go o niewielki kąt. Po wykonaniu takiego obrotu możliwe jest załączenie następnego uzwojenia i ponowny obrót wału. Niejednokrotnie wykorzystuje się równocześnie odpychanie biegunów wirnika dzięki odwrotnej polaryzacji zasilania. Innymi słowy, niektóre uzwojenia „przyciągają”, a inne „popychają” obracający się wirnik.
Zasada działania silnika krokowego z magnesem trwałym
Jeden magnes zawsze tworzy jedną parę biegunów magnetycznych. W przypadku silników krokowych takich magnesów w wirniku może być więcej, a liczba par magnetycznych w wirniku jest kolejnym parametrem, którym producent opisuje swój silnik.
Nieco inaczej działają silniki ze zmienną reluktancją, w których wirnik ma postać stalowego walca z naciętymi rowkami zamiast magnesu. Ich działanie polega na takim ustawianiu się wirnika, aby reluktancja, czyli „rezystancja” dla pola magnetycznego, była jak najmniejsza. Taki stan wystąpi wtedy, gdy wystające fragmenty wirnika (w formie „ząbków”) pokryją się z wystającymi fragmentami stojana.
Uproszczona zasada działania silnika krokowego ze zmienną reluktancją
Silniki z magnesem trwałym posiadają większy moment obrotowy, natomiast silniki ze zmienną reluktancją rozwijają większe prędkości, są tańsze i bardziej ciche. Nic więc dziwnego, że spróbowano również połączenia tych technologii – powstały silniki hybrydowe, które łączą zalety obu rozwiązań, choć są od nich zauważalnie droższe.
Komutacja mechaniczna i elektroniczna
Szczotkowe silniki prądu stałego mają poważną wadę, której nie sposób uniknąć – ich wał musi obracać się z pewną minimalną prędkością, aby zachodziła mechaniczna komutacja uzwojeń, czyli ich przełączanie. Proces takiej komutacji opisaliśmy szerzej w artykule o budowie i działaniu silników szczotkowych. Zaletą tego typu rozwiązania jest łatwość sterowania silnikiem – wystarczy go podłączyć do źródła prądu stałego. Wadą – iskrzenie oraz zużywanie się (ścieranie) szczotek i komutatora.
Pracujący komutator silnika elektrycznego
W silnikach bezszczotkowych, do których należą właśnie silniki krokowe, przełączaniem uzwojeń zajmuje się specjalny sterownik w formie układu elektronicznego. Mamy do czynienia z elektroniczną komutacją uzwojeń. Zadaniem sterownika jest dbanie o to, by uzwojenia były zasilane w odpowiedniej kolejności i z odpowiednią dynamiką. W takich silnikach praktycznym ograniczeniem żywotności jest wytrzymałość łożysk, więc są one mniej awaryjne od szczotkowych.
Silniki krokowe unipolarne i bipolarne
Istnieje kilka technik wykonywania silników krokowych. W związku z tym, że muszą one posiadać jak największą liczbę uzwojeń na obwodzie stojana, a jednocześnie niektóre z uzwojeń mogą być zasilane z tego samego źródła w tym samym czasie, łączy się je w grupy na dwa podstawowe sposoby. Z tego powodu rozróżniamy dwa podstawowe rodzaje silników: unipolarne oraz bipolarne.
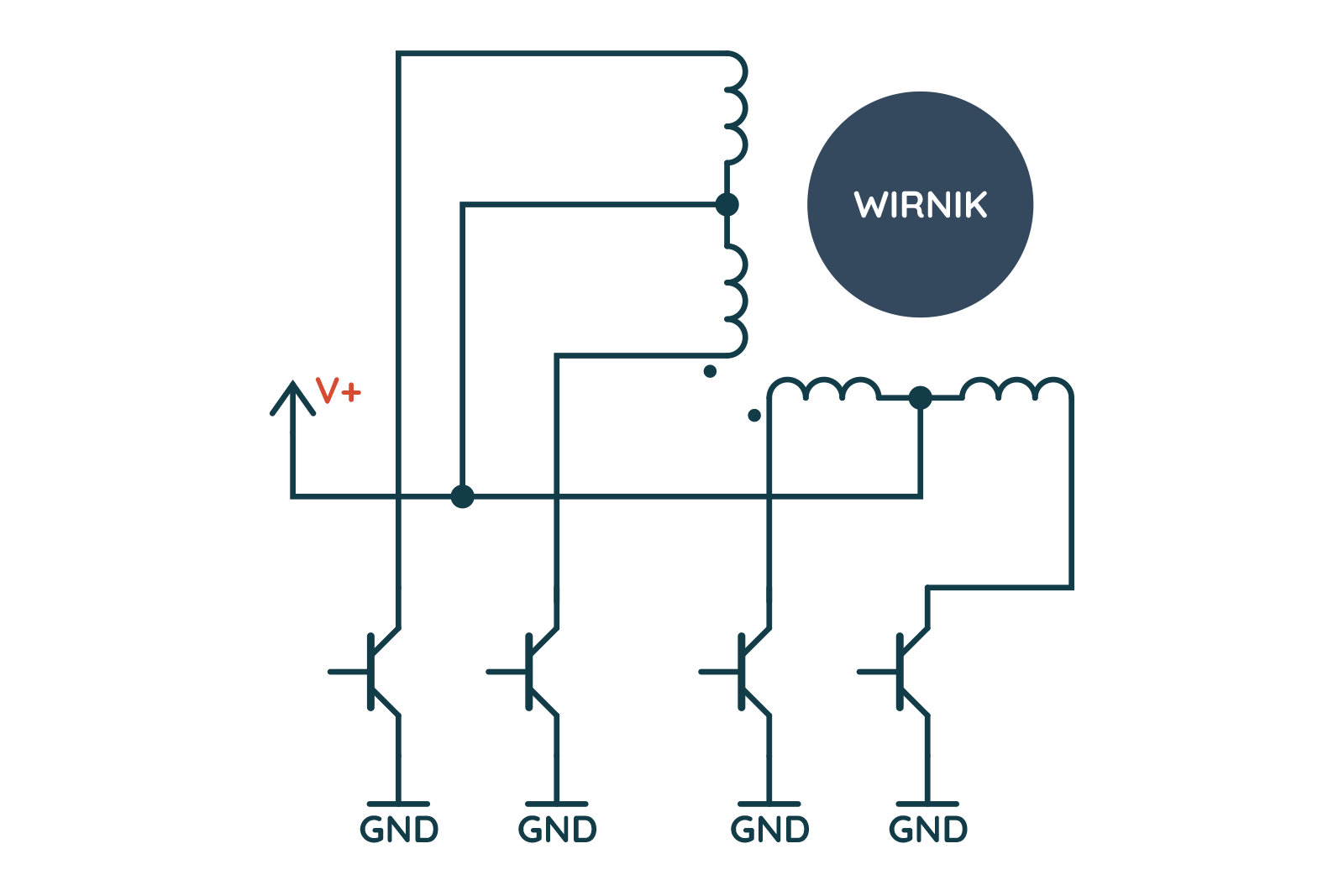
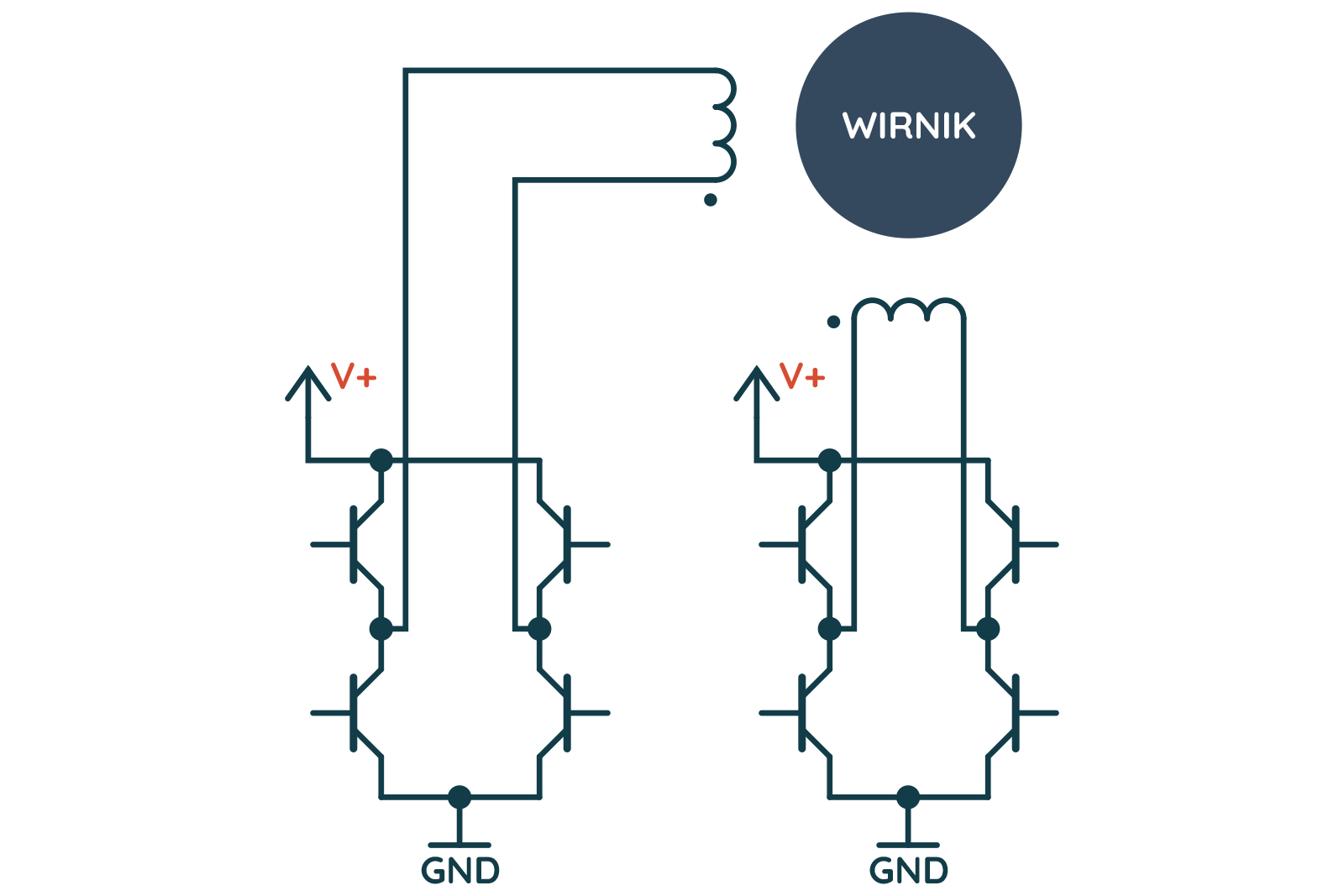
Silniki krokowe unipolarne to takie, w których kierunek prądu płynącego przez uzwojenia nie zmienia się. Na ogół każde z uzwojeń jest dołączane do zasilania przez tranzystor. Do wysterowania wystarczy więc jedynie odpowiednie włączanie lub wyłączanie tranzystora przypadającego na dane uzwojenie. Prostota sterowania okupiona jest niższym momentem obrotowym. Tradycyjne silniki unipolarne można rozpoznać po pięciu wyprowadzeniach.
Sposób podłączenia silnika unipolarnego
Silniki krokowe bipolarne zawierają z reguły dwa uzwojenia, których zaciski wyprowadzone są oddzielnie. Charakterystyczne dla nich są cztery przewody wchodzące do obudowy. Ich sterowanie jest bardziej złożone, ponieważ podczas wykonywania każdego kroku prąd płynie przez obydwa uzwojenia, za to w różnych kierunkach. Konieczne jest przełączanie zacisków uzwojeń między biegunami zasilania, np. za pomocą mostków H, o których można przeczytać w naszym kompendium i w kursie Arduino.
Sposób podłączenia silnika bipolarnego
Często spotykane są także silniki z sześcioma wyprowadzeniami. Są to silniki krokowe uniwersalne. Można je podłączyć zarówno jako unipolarne, jak i bipolarne. W sprzedaży znaleźć można także inne typy silników krokowych, np. trójfazowe czy pięciofazowe, lecz są one rzadko spotykane w rozwiązaniach innych niż przemysłowe.
Jak zasilać silnik krokowy?
W trakcie sterowania silnikiem krokowym interesuje nas praktycznie tylko prąd płynący przez uzwojenia. Dlatego nie trzeba zbytnio martwić się o to, jakim napięciem zasilamy silnik krokowy. Oczywiście każdy silnik ma wyznaczoną przez producenta pewną maksymalną wartość, jest też często podana tzw. wartość znamionowa, przy której silnik działa najsprawniej, ale dopóki mieścimy się w dozwolonym przedziale, silnik zadziała i się nie zniszczy. Jeśli natomiast przekroczymy dopuszczalny prąd, zwłaszcza przez dłuższy okres, uzwojenia ulegną spaleniu.
Wiele silników krokowych większej mocy jest przystosowanych do tzw. sterowania chopperowego. Chopper może się niektórym kojarzyć z amerykańskim motocyklem, ale w świecie elektroniki nazywa się tak aktywne źródło prądowe, które monitoruje w czasie rzeczywistym prąd płynący przez uzwojenie, niezależnie od wartości napięcia na jego zaciskach.
Przebieg czasowy sterowania chopperowego
Gdy tylko prąd urośnie do zadanej wartości, zasilanie jest wyłączane. Po odłączeniu prąd zaczyna zanikać, dlatego układ po pewnym czasie załącza je ponownie. Dzieje się to z częstotliwością rzędu tysięcy razy na sekundę. Działanie choppera przypomina nieco sterowanie sygnałem PWM, ale zamiast napięciem sterujemy średnią wartością prądu.
Wartość napięcia zasilania wpływa na jeden, podstawowy czynnik. Im wyższe napięcie, tym szybciej prąd narasta w uzwojeniach, dzięki czemu możemy sterować silnikiem bardziej dynamicznie, uzyskując wyższy moment obrotowy. Niższe napięcie sprawi, że silnik będzie wolniej reagować na nagłe zmiany w sterowaniu i będzie miał niższy moment obrotowy.
Sterowniki silników krokowych
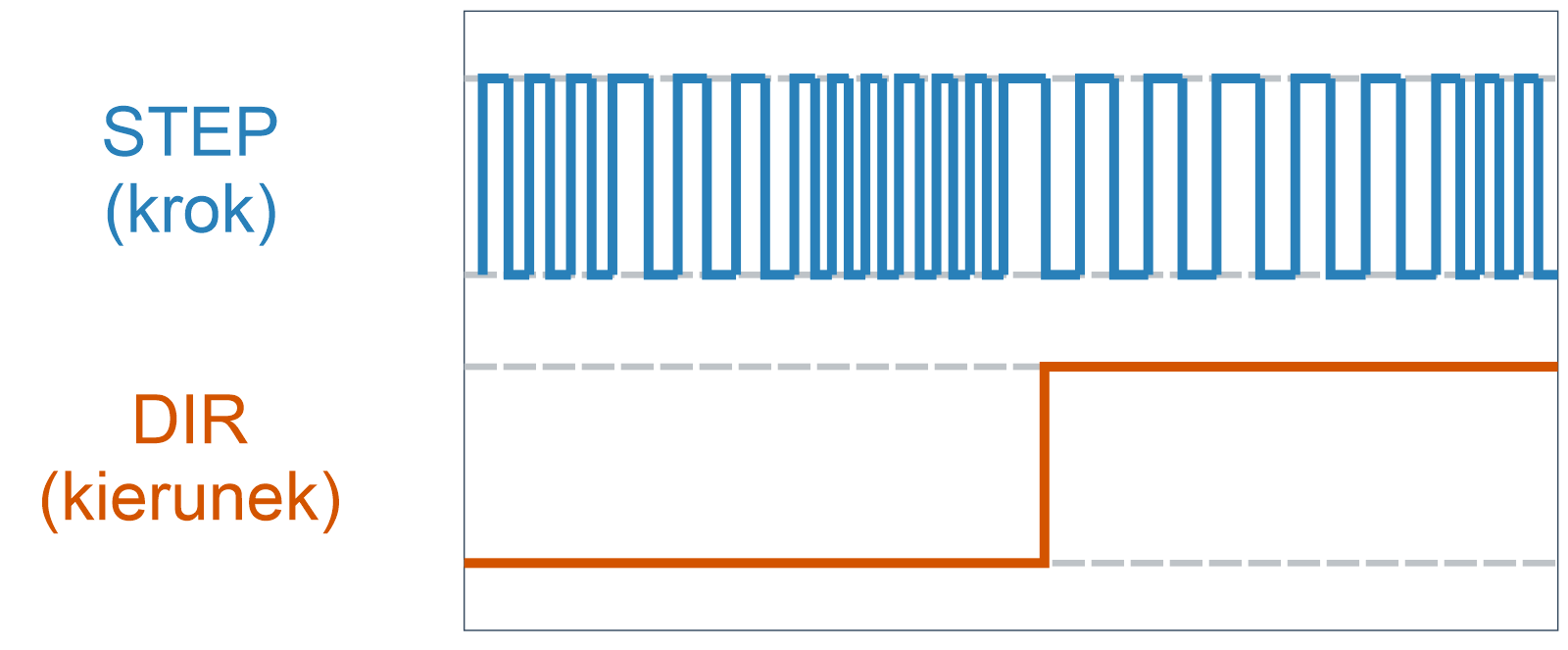
O ile sterowanie szczotkowymi silnikami prądu stałego jest proste, o tyle do wprawienia w ruch obrotowy silnika krokowego konieczny jest bardziej złożony układ. Oczywiście nie musimy wyważać otwartych drzwi. Na rynku istnieje mnóstwo gotowych sterowników, z których duża część nie wymaga niczego więcej oprócz podłączenia silnika i źródła zasilania z jednej strony, a układu kontrolującego silniki z drugiej. Popularny interfejs potrzebuje jedynie sygnału DIR interpretowanego jako kierunek obrotu oraz impulsów STEP, z których każdy impuls oznacza obrót wału o minimalny kąt.
Popularny interfejs STEP/DIR stosowany w gotowych sterownikach silników krokowych
Gotowe układy często mają zintegrowane zabezpieczenia i sterowanie chopperowe, dzięki czemu bardzo trudno jest przypadkowo zniszczyć silnik. Oczywiście w wielu przypadkach sprawdzi się też samodzielne zaprojektowanie sterownika. Jest to trudniejsze, ale za to daje czasem możliwość lepszego dopasowania sterowania do parametrów silnika.
Sterowanie mikrokrokowe
Do tej pory pisaliśmy, że silnik krokowy wykonuje „kroki” o jasno zdefiniowanym kącie obrotu. Istnieją jednak techniki, które umożliwiają wymuszenie obrotu o ułamek wartości tego kąta. Jest to tzw. sterowanie mikrokrokowe. Odbywa się ono poprzez nieco bardziej skomplikowane przełączanie uzwojeń w taki sposób, aby ich pola elektromagnetyczne częściowo się znosiły lub wzmacniały. Powoduje to wyznaczenie równowagi dla wirnika w pośredniej pozycji pomiędzy skrajnymi sąsiednimi położeniami, w których pola te działają z pełną siłą.
Uproszczona zasada działania sterowania mikrokrokowego
Wadą takiego rozwiązania jest przede wszystkim zmniejszenie momentu obrotowego. Maleje również maksymalna prędkość obrotowa wału. Olbrzymią zaletą jest natomiast znaczna poprawa rozdzielczości sterowania, co jest cenne, gdy musimy sterować mechanizmem bardzo precyzyjnie.
Na przykład silnik o fabrycznych 200 krokach na obrót – co odpowiada 360° na 200, czyli 1,8° na krok – możemy kontrolować, wykorzystując sterowanie mikrokrokowe 1:32 (na jeden zwykły krok przypadają wtedy 32 mikrokroki). Pozwoli to uzyskać aż 6400 kroków na obrót, czyli otrzymamy rozdzielczość prawie 0,06° na krok.
Jakie zalety mają silniki krokowe?
Silniki krokowe mają zdecydowaną przewagę nad silnikami szczotkowymi w zastosowaniach, które wymagają dokładnego obracania wału o zadany kąt przy jednoczesnym zachowaniu jak najwyższego momentu obrotowego. Przykładem takiego urządzenia jest frezarka CNC, w której silnik musi przesuwać wrzeciono (lub frezowany obiekt) w sposób niezwykle precyzyjny przy jednoczesnym ciągłym nacisku wirującego frezu na usuwany materiał.
Przykładowa frezarka CNC do frezowania drewna
Oczywiście istnieją rozwiązania pozwalające wykorzystać w tym celu silnik szczotkowy. Wymaga to jednak czujników pozycji wału (enkoderów) i zaawansowanych sterowników z pomiarem prądu, które znacząco podnoszą cenę. Dużo efektywniejsze może się okazać zastosowanie silnika krokowego, w którym obrót wału można precyzyjnie kontrolować nawet bez dodatkowych czujników. Jest to tzw. sterowanie w otwartej pętli, czyli bez informacji zwrotnej na temat położenia wału.
Sterowanie z ujemnym sprzężeniem zwrotnym oznacza, że sterownik potrzebuje informacji zwrotnej o aktualnej pozycji wału obrotowego, np. z enkodera. Sterowanie w otwartej pętli sprzężenia zwrotnego oznacza, że sterownik nie potrzebuje takiej informacji do działania.
Konsekwencją takiego rozwiązania jest nie tylko możliwość obracania o określony kąt, ale także utrzymania bardzo niskich obrotów bez dodatkowych przekładni mechanicznych. Na przykład można zbudować zegar, którego wskazówka jest połączona z wałem silnika krokowego i obraca się z prędkością 1 obrotu na dobę, by następnie zacząć zliczać sekundy z prędkością 1 obrotu na minutę. W przypadku innych silników takie rozwiązanie może być trudne w realizacji.
Bardzo ważną zaletą jest także brak zużywających się części (poza łożyskami). Nie występuje też zjawisko iskrzenia w trakcie komutacji, więc można go bez obaw stosować np. w środowisku pełnym łatwopalnych gazów, zagrożonym wybuchem.
Jakie wady mają silniki krokowe?
Oczywistą wadą silników krokowych jest bardziej wymagający sposób sterowania, czyli dbanie o prawidłową komutację elektroniczną. Choć można zastosować gotowe sterowniki, ich użycie nie jest tak intuicyjne jak po prostu podłączenie zasilania do zacisków silnika szczotkowego. Nieprawidłowe sterowanie powoduje niekontrolowany ruch wału obrotowego, może też go trwale uszkodzić.
Silniki krokowe zachowują się trochę jak zatrzymany silnik szczotkowy – przez uzwojenia przepłynie tak duży prąd, jaki tylko będzie możliwy do uzyskania z danego źródła zasilania. Z tego powodu trzeba bardzo pilnować jego natężenia, ograniczając go do wartości znamionowej – w przeciwnym wypadku spalimy uzwojenia.
Wnętrze silnika krokowego z widocznymi uzwojeniami, które mogą ulec uszkodzeniu
Kolejną istotną wadą jest mocno ograniczona maksymalna prędkość obrotowa. O ile wśród silników szczotkowych powszechne są prędkości rzędu dziesiątek tysięcy obrotów na minutę, o tyle w przypadku silników krokowych rzadko stosuje się prędkości większe niż tysiąc. Dalsze zwiększanie prędkości sprawi, że wirnik nie da rady nadążyć za wirującym polem elektromagnetycznym, przez co całkowicie straci swój moment obrotowy i stanie, lekko drgając. Sterowanie mikrokrokowe dodatkowo zmniejsza tę graniczną, maksymalną prędkość.
Istnieje też zjawisko zwane gubieniem kroków – czyli sytuacja, gdy silnik nie jest w stanie wykonać ruchu o zadany kąt, np. pod wpływem zbyt dużego obciążenia. Jest to duży problem w momencie, kiedy polegamy tylko na sterowaniu w otwartej pętli sterowania. Sterownik przykładowej drukarki 3D może „myśleć”, że głowica przesunęła się o 1 cm, podczas gdy w rzeczywistości stała ona w miejscu. Gdy znów podejmie swoją pracę, reszta wydruku będzie przesunięta o centymetr w jednej z osi.
Gubienie kroków silników krokowych to częsty problem osób korzystających z drukarek 3D
Problem ten można rozwiązać na trzy sposoby. Można przewymiarować używany silnik, tzn. dobrać silnik z odpowiednio dużym zapasem momentu obrotowego. Można też zastosować ujemne sprzężenie zwrotne w sterowaniu, czyli np. dodać enkoder. Oprócz tego nowoczesne sterowniki posiadają wbudowany system wykrywania gubienia kroków, więc jeśli nawet nie uda się temu zjawisku zapobiec, to przynajmniej można odpowiednio zareagować, np. zatrzymując pracę urządzenia, a następnie informując użytkownika o zaistniałej sytuacji.
Zastosowania silników krokowych
Z wyżej wymienionych powodów silniki krokowe rzadko stosuje się w miejscach, gdzie wymaga się wysokiej prędkości oraz dużego momentu obrotowego (np. napęd kół robota). Ich zastosowanie ogranicza się przede wszystkim do rozmaitych manipulatorów, podajników, wysięgników i innych urządzeń, które wymagają precyzyjnego ustalenia położenia.
Drukarka 3D – widać silnik tłoczący plastik do głowicy oraz silnik przesuwający głowicę w jednej z osi
W domu silnik krokowy można zazwyczaj znaleźć w zwykłej drukarce laserowej. Niegdyś silniki tego typu były nawet częściej spotykane w stacjach dyskietek, napędach CD/DVD i skanerach. Obecnie stosuje się je masowo w domowych drukarkach 3D, laserach, frezarkach i innych obrabiarkach CNC.
Silniki krokowe z napędów płyt CD/DVD
Silniki krokowe z drukarek PC
Ciekawostką jest fakt, że zmieniając częstotliwość impulsów sterujących silnikiem krokowym, możemy go zmusić do „grania” – wydawania dźwięków o pożądanej częstotliwości. Z tego powodu popularne w Internecie stało się budowanie swego rodzaju instrumentów złożonych z różnych silników krokowych wmontowanych w stare urządzenia elektroniczne.
Silniki krokowe występują w bardzo wielu odmianach i modyfikacjach, lecz celem tego artykułu było przedstawienie i omówienie wyłącznie tych najważniejszych. Warto również dodać, iż prężnie rozwijająca się inżynieria materiałowa oraz elektronika powodują, że silniki krokowe znajdują coraz szersze zastosowania, a ich możliwości rosną. Dzięki popularyzacji urządzeń takich jak np. drukarki 3D dostępność tanich silników krokowych jest coraz lepsza, więc warto zacząć z nimi eksperymentować.
Co o tym sądzisz? Oceń ten wpis:
Średnia ocena 4.8 / 5. Głosów łącznie: 178
Nikt jeszcze nie głosował, bądź pierwszy!
Artykuł nie był pomocny? Jak możemy go poprawić? Wpisz swoje sugestie poniżej. Jeśli masz pytanie to zadaj je w komentarzu - ten formularz jest anonimowy, nie będziemy mogli Ci odpowiedzieć!
Na temat silników elektrycznych powiedziano już bardzo dużo. Wiedza ta, rozsiana po internecie, bywa trudna do znalezienia. Niniejszy cykl... Czytaj dalej »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.





























Trwa ładowanie komentarzy...