Uczenie robotów chwytania różnych obiektów to żmudna praca. Najczęściej wykorzystuje się do tego celu sztuczną inteligencję, która pozwala na samodzielną naukę.
Jednak samo chwycenie przedmiotu to za mało. trzeba też utrzymać go w nieprzewidzianych sytuacjach. Pomoże tu robot-przeciwnik!
Konstruktorzy z CMU i Google uczą roboty chwytające stawiania czoła wyzwaniom w oparciu o uczenie głębokie i teorię gier.
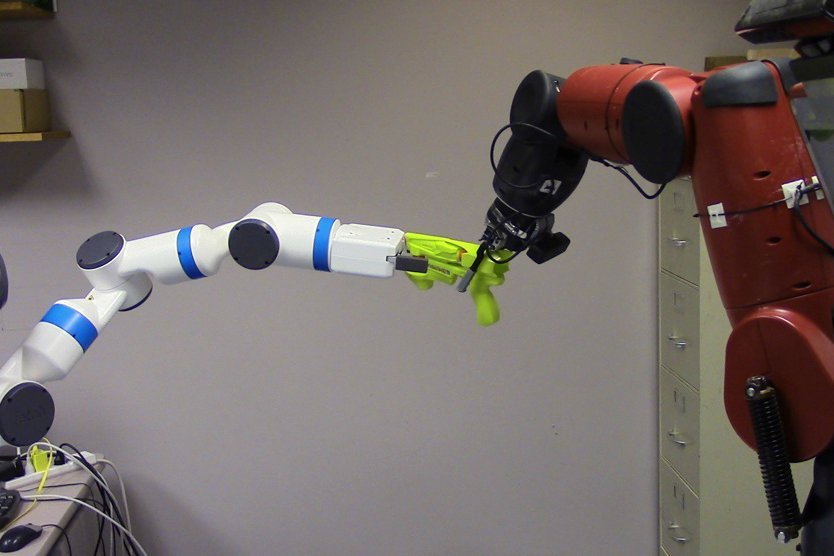
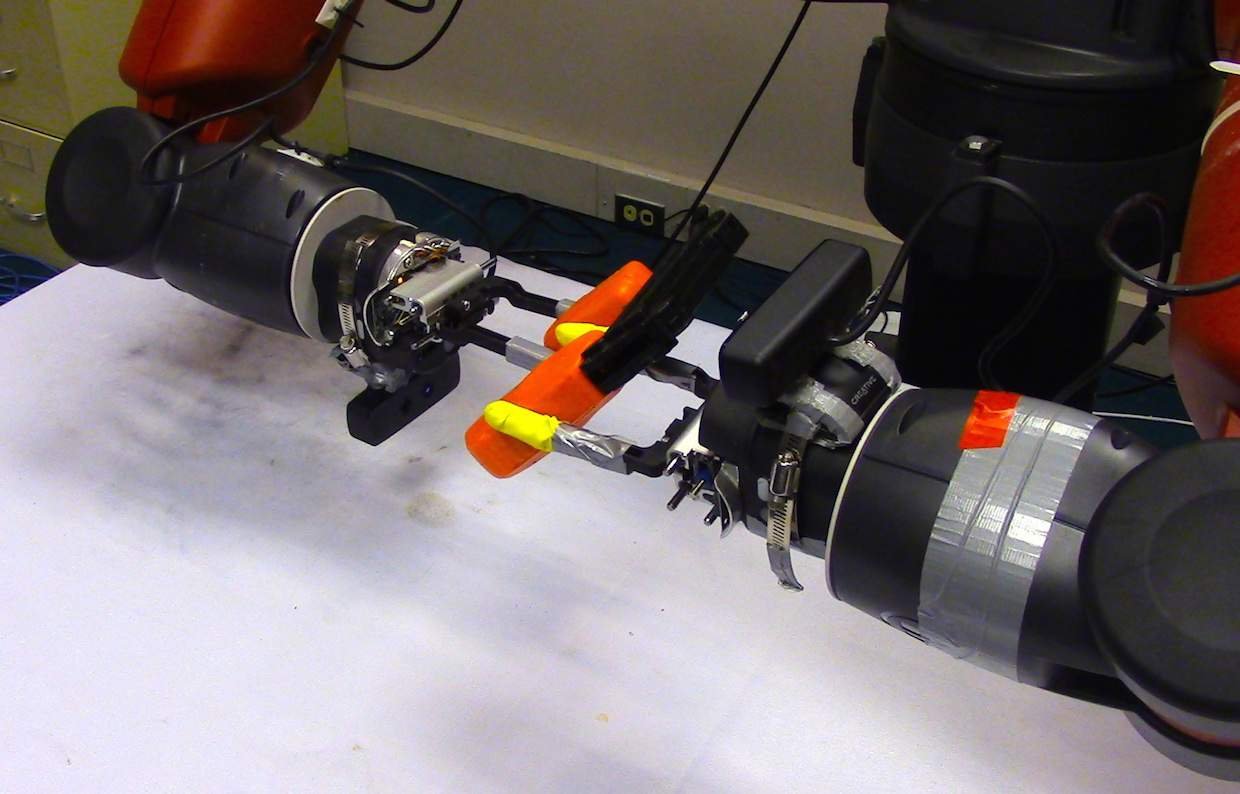
Przeciwnikiem nie musi być druga maszyna – wystarczy “złe alter ego”, czyli jedno z ramion przeszkadzające drugiemu, a nawet celowe drżenie chwytaka. W każdym przypadku jego zadaniem jest utrudnianie zadania – wyrwanie przedmiotu lub doprowadzenie do upuszczenia.
Taka rozgrywka według teorii gier stanowi powtarzalną gre o sumie zerowej dla dwóch graczy. Obie strony to sieci neuronowe. W rezultacie dochodzi do swoistego “wyścigu zbrojeń”, bo i porażki, i sukcesy są okazją do dalszej nauki.
Jeśli przeciwnik wygra, to robot ulepsza chwyt. Z kolei jeśli chwyt jest udany, to przeciwnik uczy się skuteczniej przeszkadzać.
Statystyki pokazują, że nauka w ten sposób jest szybsza i skuteczniejsza niż trening bez użycia przeciwnika. Rośnie nie tylko liczba pewnych, stabilnych chwytów, ale także sama liczba skutecznie złapanych i nieupuszczonych przedmiotów.
W tym rozwiązaniu tkwi duży potencjał, jeśli chodzi o pracę w warunkach rzeczywistych, które są pełne wyzwań i niespodziewanych trudności do pokonania. Być może w przyszłości do potrząsania i wyrywania dołączą inne utrudnienia, w zależności od sytuacji i rodzaju podnoszonych obiektów.
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.






















Trwa ładowanie komentarzy...