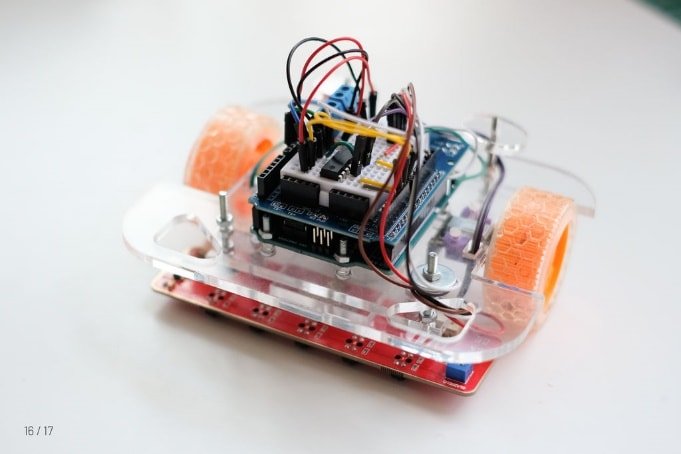
Robot sterowany jest za pomocą Arduino UNO, do którego podłączono sterownik silników oraz moduł czujników linii (znany z robotów typu LineFollower). Wszystkie te elementy zostały zamocowane na małej płytce z pleksi, do której przytwierdzono również silniki.
Cała konstrukcja została zamknięta w dedykowanej, estetycznej obudowie, która powstała na drukarce 3D. To, co odróżnia Wipy od typowego robota śledzącego linię, to gąbka oraz dodatkowe magnesy, dzięki którym może on poruszać się po wiszącej tablicy.
Wnętrze robota z widoczną płytką Arduino UNO
Złożony i gotowy do działania robot-gąbka
Zasada działania autonomicznej gąbki polega na ciągłym śledzeniu linii (śladu markera) na powierzchni tablicy. Z każdym przejechanym centymetrem robot ściera ślady pisaka. Dzięki zastosowaniu modułu, który ma aż 5 sensorów, ryzyko zgubienia linii zostało zminimalizowane praktycznie do zera.
Na górze robota znalazło się jeszcze miejsce na dodatkowy wyświetlacz OLED, na którym pokazywana jest animacja wizualizująca aktualne ruchy robota (czyli jazdę do przodu, w lewo lub w prawo). Praca robota widoczna jest na poniższej, humorystycznej prezentacji przygotowanej przez autorów tego DIY:
Projekt należy oczywiście traktować z przymrużeniem oka, bo jego zastosowanie jest raczej nikłe. Może będzie on jednak dobrą inspiracją dla innych urządzeń tego typu? Osoby zainteresowane stworzeniem swojej wersji Wipy’ego znajdą wszystkie niezbędne informacje w udostępnionej instrukcji. Macie jakiś pomysł, jak mógłby wyglądać robot tego typu, który byłby faktycznie przydatny?
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.

























Trwa ładowanie komentarzy...