Kursy • Poradniki • Inspirujące DIY • Forum





Wpisy z tagiem: hexapod
Robotyczna mrówka z Arduino? Dokładny poradnik budowy

Roboty kroczące to efektowne urządzenia. Takie konstrukcje mogą zrobić duże wrażenie nawet na postronnych obserwatorach, którzy nie wiedzą ile pracy kosztuje przygotowanie takiego robota.
Jeśli przeraża Was poziom skomplikowania takich konstrukcji to na pewno ucieszy Was poradnik, który opisuje budowę robotycznej mrówki.
Creadapt coraz trudniejszy do zatrzymania

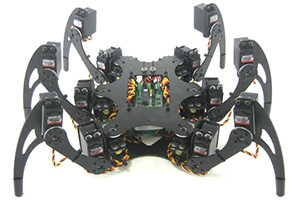
Wyobraźcie sobie, że wysyłacie robota na misję gdzieś bardzo daleko, gdzie nie macie szansy naprawić ewentualnej usterki.
Zależy Wam zatem na jego jak największej samodzielności, również w nieprzewidywanych sytuacjach. Hexapod, o którym tu mowa dobrze poradzi sobie z tymi zadaniami.
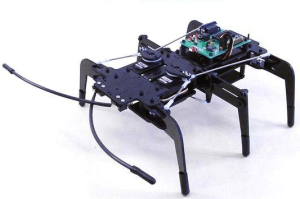
Roboty kroczące – konstrukcja mechaniczna
Roboty kroczące zyskują ostatnio coraz większą popularność. Z konstrukcji budowanych tylko w ośrodkach badawczych stały się urządzeniami komercyjnymi oraz budowanymi amatorsko.
W artykule omówione zostały podstawy, związane z konstrukcją mechaniczną robotów kroczących.
Roboty kroczące – teoria i podstawy projektowania
Projektując robota kroczącego, konstruktor musi odpowiedzieć sobie na wiele pytań. Wiąże się to między innymi z założeniami konstrukcyjnymi.
Część z nich jest natury ogólnej, część musi jednak być szczegółowa. W artykule opisałem najważniejsze zagadnienia związane z projektowaniem robotów mobilnych kroczących.






Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.