Roboty kroczące zyskują ostatnio coraz większą popularność. Z konstrukcji budowanych tylko w ośrodkach badawczych stały się urządzeniami komercyjnymi oraz budowanymi amatorsko.
W artykule omówione zostały podstawy, związane z konstrukcją mechaniczną robotów kroczących.
Ze względu na mnogość możliwości, konstruktor nie musi ograniczać się do powielania popularnych rozwiązań (jak ma to miejsce w przypadku znacznej większości robotów kołowych). Ma natomiast możliwość testowania rozwiązań niestandardowych i mało popularnych. Artykuł ten został poświęcony przeglądowi jedynie części opisywanych zagadnień.
Konstrukcja nogi
Stopa
Stopa jest elementem nogi robota, który chyba w największym stopniu decyduje o jego możliwościach. Równocześnie wymaga największych kompromisów. Najpopularniejsze typy:
Brak stopy - noga jest ostro zakończona (bądź też zaokrąglona lub z nakładką, mającą na celu zwiększenie przyczepności).
Ważne jest, aby robot nie niszczył powierzchni, po której się porusza.
W przypadku takiego rozwiązania, powierzchnia podparcia jest nieduża (co utrudnia trzymanie równowagi na płaskich, poziomych powierzchniach). Trudno również wykryć zetknięcie stopy z podłożem.
Drugi problem można rozwiązać przez zwiększenie stopy lub odpowiednie rozwiązanie mechaniczne, np. przeniesienie czujnika wyżej i łożyskowanie stopy. W takim wypadku zwiększy się jej ciężar (co jest niewskazane) oraz zawodność mechanizmu ze względu na jego skomplikowanie. Takie rozwiązanie posiada również pewne zalety, takie jak:
prostota konstrukcji
niewielkie przesunięcie punktu podparcia podczas ruchu
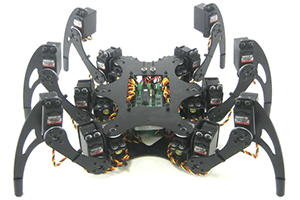
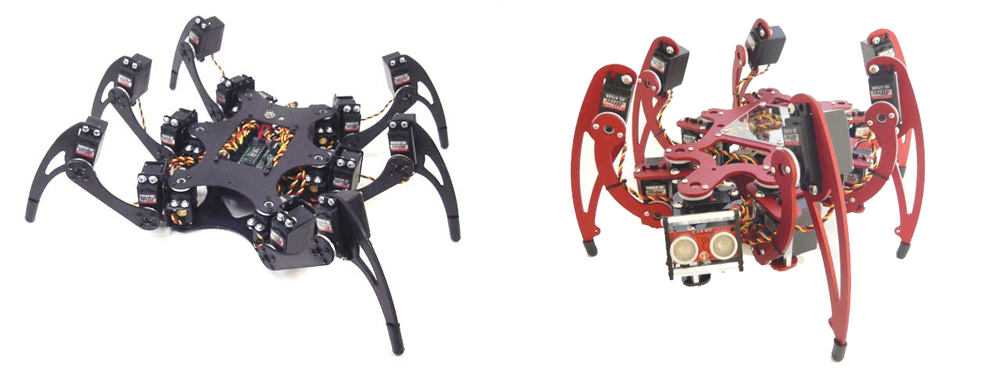
Jest ona najczęściej stosowaną konstrukcją w robotach komercyjnych (takich jak Phoenix lub MSR-H01) i amatorskich.
Robot Phoenix oraz MSR-H01. Zdjęcia ze strony producentów.
Stopa kulista sztywna - noga jest zakończona kulą, dzięki czemu robot może się poruszać po bardziej miękkim lub grząskim podłożu. Wadą takiego rozwiązania, w porównaniu do braku stopy, jest zwiększenie zmiany położenia punktu podparcia podczas wykonywania ruchu. Sporą zaletą jest większa łatwość wyposażenia robota w czujnik dotyku.
Stopa obrotowa - przymocowana do reszty nogi za pomocą obrotowego przegubu, dzięki czemu podczas ruchu nie dochodzi do poślizgu ani przesuwania się punktu podparcia.
Niestety tego typu stopa jest cięższa oraz znacznie bardziej skomplikowana mechanicznie.
Stopa płaska sztywna - ma odwzorowywać kształt stopy człowieka bądź też niektórych zwierząt. Zaletą jest dobra stabilność na płaskim terenie oraz dobra przyczepność, jednakże wadą jest duże przesunięcie oraz tarcie podczas ruchu, przez co w praktyce nie można przy takiej konstrukcji, nawet z kiepską dokładnością, określić położenia.
Z dużym tarciem wiążą się spore straty energii.
Stopa kołowa - noga jest zakończona kołem, które może być swobodne, jak w przypadku robota Roller-walker:
Roller-walker.
Koło może być również napędzane tak, jak jest to w przypadku robota PAW, ATHLETE bądź skonstruowanego przeze mnie Cuprum. W takim przypadku robot posiada możliwość jazdy (co pozwala na znacznie szybsze i efektywniejsze energetycznie poruszanie się po płaskim terenie). Może nawet wykorzystywać stopę jako efektor (np. ATHLETE może montować narzędzia i korzystać z nogi jak z robota-manipulatora przemysłowego).
Noga
Projekt reszty nogi jest ściśle zależny od wybranego wzorca biologicznego, na którym bazuje nasza konstrukcja, a także od rodzaju napędów, zastosowania oraz szybkości poruszania się. Wzorce biologiczne w skrócie:
owad - korpus umieszczony poniżej zgięcia w kolanie: (+) wysoka stabilność, (-) niska sprawność energetyczna.
gad - korpus umieszczony na poziomie zgięcia w kolanie: (+-)dobra stabilność, (+--) przeciętna sprawność energetyczna.
ssak - korpus umieszczony ponad nogami: (-) kiepska stabilność, (+) dobra sprawność energetyczna.
Pierwsze rozwiązanie jest najczęściej stosowane. Jest najprostsze w implementacji i zwykle nie wymaga zaawansowanych algorytmów stabilizacji.
Ostatnie jest coraz częściej spotykane ze względu na dużą moc obliczeniową współczesnych układów mikroprocesorowych oraz coraz lepsze czujniki bezwładnościowe (żyroskopy, akcelerometry). Więcej informacji na ten temat znaleźć można w artykule:
Elektryczny - w przypadku większości konstrukcji są to serwa modelarskie lub robotyczne. Niektóre mogą posiadać oddzielny silnik i czujnik położenia (raczej większe konstrukcje).
Serwa robotyczne charakteryzują się nieco innym sterowaniem oraz możliwościami. Wał znajduje się po obu stronach obudowy. Niestety są również dużo droższe.
Zaletą takiego rozwiązania jest łatwość zasilania, kontrolowania mocy (PWM) i pomiaru siły (pomiar prądu). Wadą jest konieczność stosowania napędów z przekładniami (silniki są zbyt szybkie) oraz ograniczenie do napędu obrotowego (przesuwne co prawda istnieją, ale mechanizm śrubowy jest albo bardzo drogi, albo bardzo zawodny). Podczas zatrzymania mogą pobierać znaczny prąd.
Hydrauliczny - stosowany w niektórych konstrukcjach profesjonalnych, np. w robocie Big Dog. Charakteryzują się znakomitą siłą i dynamiką w stosunku do rozmiaru, ich zasilanie jest jednak kłopotliwe. Łatwo można uzyskać napęd przesuwny o bardzo dużej sile. Podczas zatrzymania nie mają problemu z poborem większej ilości energii. Zasilanie jest zwykle dostarczane z zewnątrz. Mogą też posiadać własną sprężarkę, napędzaną innym silnikiem, np. spalinowym.
Inne typy napędów (np. spalinowy lub pneumatyczny) nie są wykorzystywane z powodu niemożności łatwego i szybkiego sterowania szybkością/przesunięciem i innych problemów.
Obliczanie parametrów napędu
Niezależnie od zastosowanych napędów, należy określić minimalne parametry, które muszą być spełnione, aby robot mógł się poruszać. W przypadku zastosowania serwomechanizmów należy przede wszystkim pamiętać o następujących rzeczach:
Moment. W specyfikacji zazwyczaj podawany jestmoment w stanie zwarcia dla poszczególnych napięć zasilania. Mimo że poprawną jednostką jest Nm [1N*1m], często używa się kg*cm. Zamiana jednostek jest niezwykle prosta:
1kg*cm = 0.1Nm 1Nm = 10kg*cm
Prędkość obrotowa. Najczęściej podawana w sekundach, określa czas potrzebny na pokonanie 60 stopni. Oznacza to, że przelicznik jest następujący:
1s=1.047 rad/s 1 rad/s = 0.955s
Materiał wykonania przekładni.
Metalowe są wytrzymałe, dzięki czemu wolniej się zużywają i wytrzymują większe obciążenia niż te z tworzywa, ale znacznie zwiększają masę serwa oraz są droższe.
Plastykowe są lekkie, przy małych obciążeniach cichsze, ale ich żywotność jest znacznie niższa niż metalowych (od których są tańsze) i nie nadają się do dużych obciążeń.
Karbonowe są dość lekkie, wytrzymują spore obciążenia, ale są znacznie droższe.
Napięcie zasilania. Zwykle wynosi 5 lub 6 V, ale zdarzają się serwa na wyższe napięcie (zwykle droższe i mocniejsze). Serwa można zasilać bezpośrednio z akumulatora (o ile napięcie jest odpowiednie, należy jednak pamiętać o tym, że napięcie w miarę rozładowywania spada). Można je również zasilać przez przetwornicę impulsową lub moduł BEC (będący gotową przetwornicą impulsową).
Dla większych serw lub ich większej liczby odradzam zasilanie przez stabilizator liniowy, gdyż podczas obciążenia mogą pobierać znaczny prąd.
Rozmiar. Wyróżnia się kilka rozmiarów standardowych, związanych z klasami masowymi. Reguła jest następująca: większe serwo (przy założeniu takiego samego materiału, z którego wykonano przekładnię) posiada większą moc lub niższą cenę.
Odrobina teorii
Obliczanie momentu
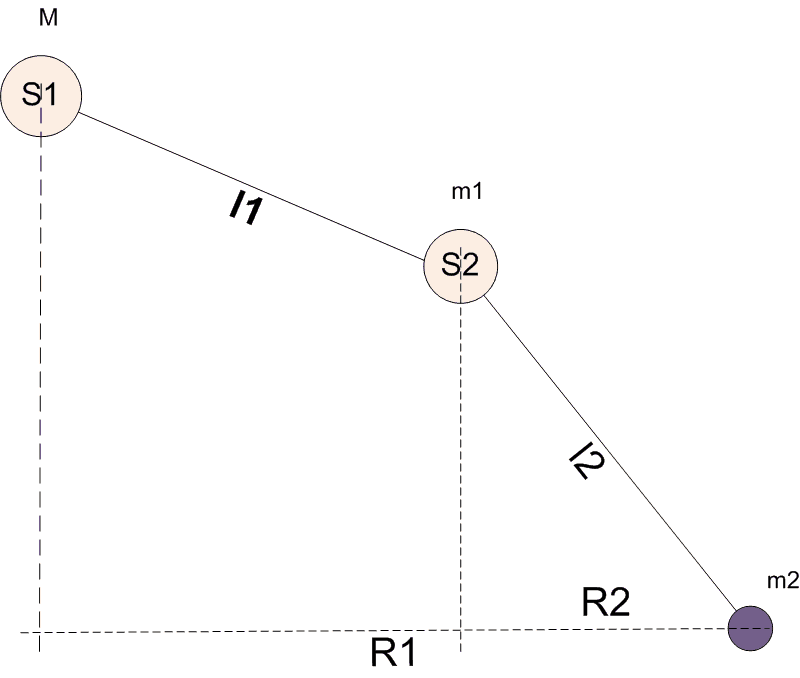
Na poniższym rysunku przedstawiono przypadek dla typowej nogi robota kroczącego:
Aby robot mógł się podnieść, w krańcowym przypadku S1 musi unieść ciężar robota. Jednakże można zwykle pominąć ciężar niższych partii nogi. S2 musi podnieść całego robota wraz z własnym ciężarem, ale z pominięciem masy stopy, za to ramię obciążające jest mniejsze. W granicznym przypadku momenty powinny wynosić minimum:
S1: M*(l1+l2) S2: (M+m1)*(l2)
Gdzie M to masa robota z serwem S1, m1 to masa S2, m2 to masa stopy.
Często ze względu na wymiary, konstrukcję lub zakładane zakresy ruchu serw wystarczy obliczyć momenty dla przypadków granicznych.
S1: M*(R1+R2) S2: (M+m1)*(R2)
Te wartości momentów są niższe niż w poprzednim przypadku. Oznacza to, że jeśli nasze serwa są za słabe, wystarczy odpowiednio ograniczyć zakres ich ruchu.
Tak obliczone wartości są wartościami granicznymi, przy których robot będzie w stanie jedynie stać, ale nie podniesie się ani nie będzie mógł się poruszać.
Dodatkowo serwa będą pobierały znaczny prąd, co spowoduje szybkie ich niszczenie przez nagrzewanie i zużywanie szczotek oraz szybsze rozładowywanie się akumulatora.
Moment należy dobrać jak największy (w ramach naszego portfela i bez zmniejszania prędkości), ale (moim zdaniem) minimum o 50% wyższy niż obliczony.
Sprawność energetyczna
Roboty kroczące mają z reguły bardzo niską sprawność. Aby ją poprawić należy pamiętać o kilku podstawowych zasadach:
W=F*s oraz W=M*fi - tracona energia jest ściśle związana z działającymi siłami i momentami oraz uzyskanymi przesunięciami i obrotami. Innymi słowy, nawet jeżeli potrzebny jest duży moment do utrzymania robota, ale nie następuje przesunięcie, nie jest wykonywana praca!
Reguła ta dotyczy zarówno podnoszenia korpusu robota jak i unoszenia nóg!
Ruch można tak zaprogramować (przynajmniej czasami) aby środek ciężkości był na stałej wysokości (tym samym praca wykonana jest bliska zeru), ale nogi muszą być podnoszone, aby robot mógł się poruszać (oczywiste). Tym samym ciężar nóg może powodować, że nawet świetnie wykonana konstrukcja będzie miała kiepską wydajność, gdyż nogi (w szczególności stopy) są ciężkie.
Silniki elektryczne w stanie zwarcia pobierają znaczny prąd. Z tego powodu profesjonalne serwa robotyczne posiadają ustawienia histerezy - aby serwo nie było cały czas w stanie zwarcia podczas zatrzymania, a mogło mieć niewielki uchyb. Warto też mierzyć prąd serwomechanizmów, aby wykrywać sytuacje, w których dochodzi do zablokowania (w konstrukcji lub spowodowanej przez teren) w trakcie osiągania pozycji zadanej.
Pasowanie elementów ruchomych powinno być jak najlepsze, aby uniknąć dodatkowych naprężeń, a tarcie możliwie najmniejsze, aby opory ruchu były minimalne.
Warto czasami zainteresować się alternatywnymi sposobami poruszania się, np. w łatwiejszym terenie, które mają większą sprawność energetyczną niż chód.
Podsumowanie
Myślę, że przybliżyłem podstawowe zagadnienia związane z budową robotów kroczących. Celowo pominąłem kwestie programowania i algorytmów, gdyż chciałem skupić się na samej konstrukcji mechanicznej. Mam nadzieję, że opis okazał się przystępny i pomocny.
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.























Trwa ładowanie komentarzy...