Roboty kroczące to efektowne urządzenia. Takie konstrukcje mogą zrobić duże wrażenie nawet na postronnych obserwatorach, którzy nie wiedzą ile pracy kosztuje przygotowanie takiego robota.
Jeśli przeraża Was poziom skomplikowania takich konstrukcji to na pewno ucieszy Was poradnik, który opisuje budowę robotycznej mrówki.
Na Forbocie od wielu lat można znaleźć przykłady robotów kroczących - od takich, które mają tylko 2 nogi, aż po takie z 8 kończynami. Na naszym forum wielu konstruktorów opisywało swoje zmagania np. z kinematyką odwrotną w praktyce.
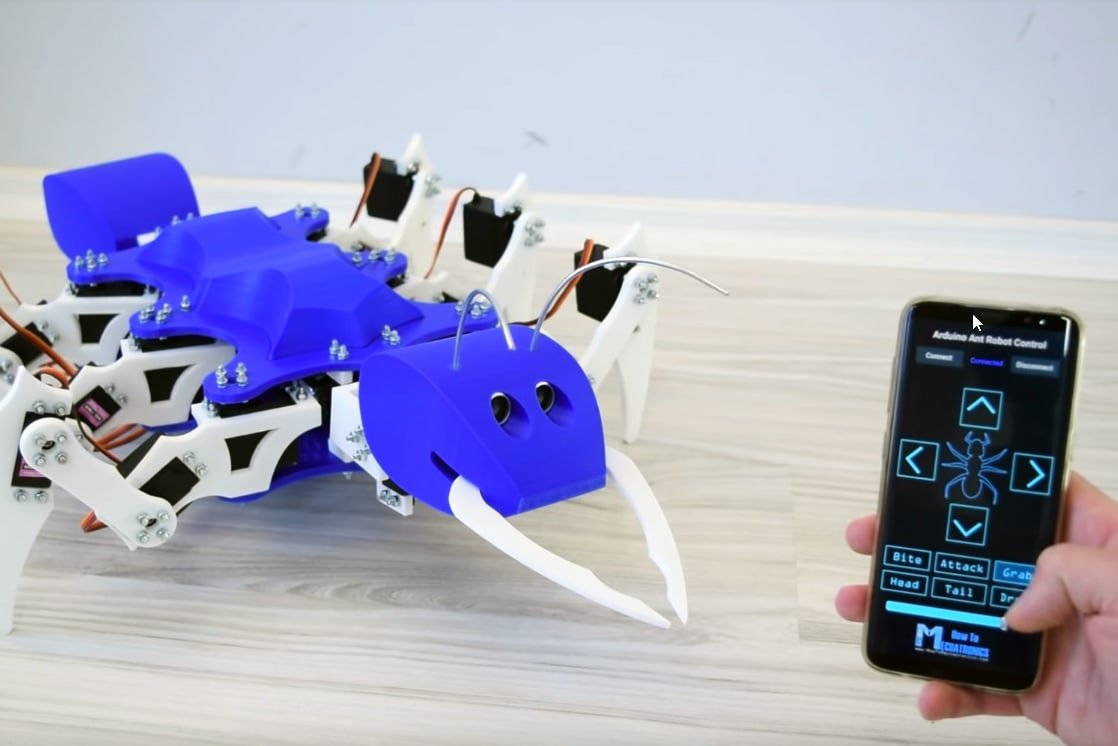
W październiku opisywaliśmy projekt giętarki do drutu sterowanej przez Arduino. Tym razem, ten sam autor postanowił przygotować poradnik budowy robotycznej mrówki. Robot, oprócz podstawowych funkcji, potrafi zgrabnie poruszać głową i odwłokiem, chwytać i upuszczać przedmioty, kąsać, a nawet atakować, gdy się do niego zbliżymy.
Montaż wydrukowanych części robota
Za poruszanie się robota odpowiada 18 serwomechanizmów MG996R – po trzy na jedną nogę. Dodatkowe dwa odpowiadają za ruch głowy, a kolejny za ruch ogona. Z kolei za ruch szczęki robota odpowiada miniaturowe serwo SG90. Elementy konstrukcyjne zostały zaprojektowane w programie CAD, a następnie wydrukowane na drukarce 3D.
Aplikacja na smarfony z Androidem umożliwia zdalne sterowanie
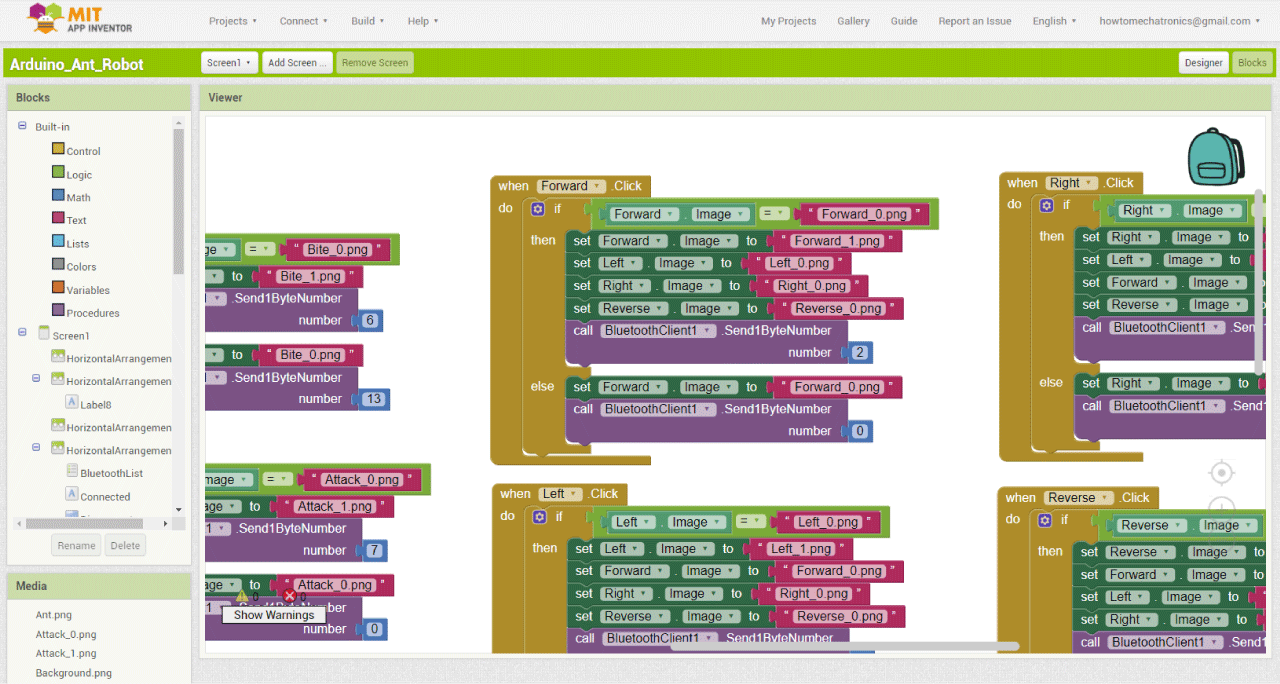
Mózgiem robota jest Arduino Mega. Kontroluje ono pracę serwomechanizmów, a za pośrednictwem modułu Bluetooth komunikuje się z aplikacją na telefonie operatora. Oprogramowanie na Androida zostało stworzone w graficznym kreatorze MIT App Inventor. Umożliwia ono zaawansowaną kontrolę nad robotem przy użyciu wygodnego interfejsu.
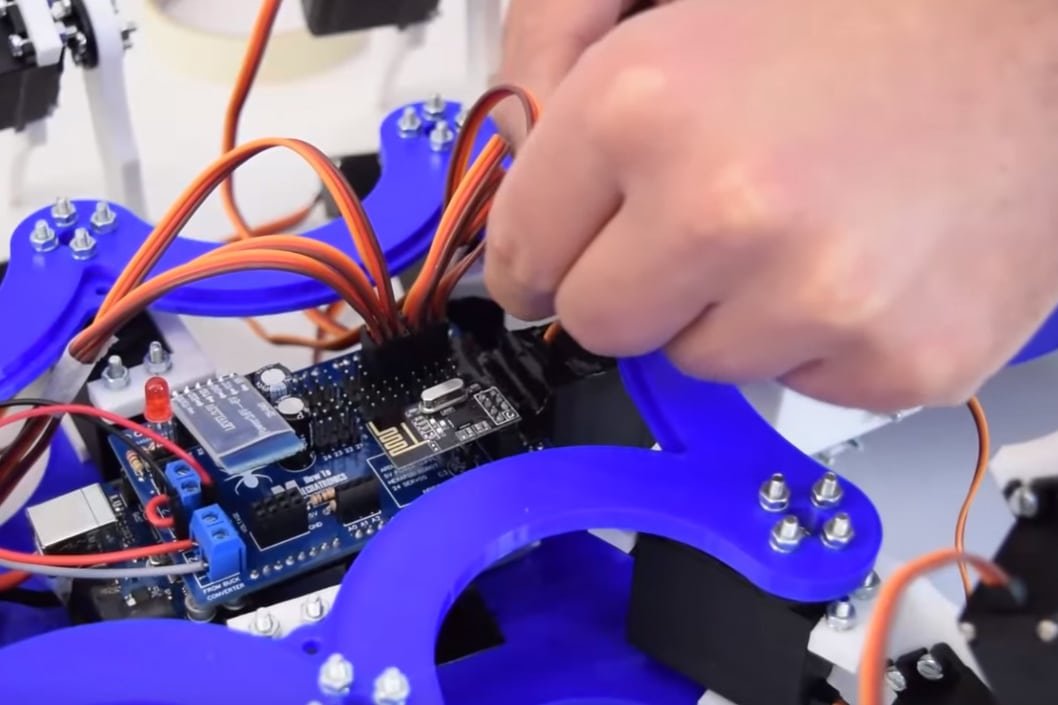
Dedykowany shield do Arduino Mega
Zaprojektowany został dedykowany shield do Arduino, dzięki któremu znacznie łatwiej można połączyć wszystkie elementy w całość. Na płytce dodane zostały również wyprowadzenia dla modułu radiowego NRF24L01 na wypadek, gdybyśmy chcieli komunikować się z robotem inaczej niż przez Bluetooth.
Fragment programu używanego do komunikacji przez Bluetooth
Na płytce umieszczony został również dzielnik napięcia umożliwiający kontrolę stanu naładowania akumulatora. Na shieldzie nie zabrakło oczywiście kilku wolnych GPIO, dwóch diod LED i dodatkowych pinów zasilania, które można użyć do samodzielnej rozbudowy robota.
Działanie robotycznej mrówki widoczne jest na poniższym wideo od 20 minuty i 20 sekundy:
Wszystkie pliki potrzebne do wykonania tego robota kroczącego zostały udostępnione na stronie autora i są częścią dokładnego poradnika opisującego budowę tej kroczącej konstrukcji. Korzystając ze znajdujących się tam materiałów praktycznie każdy będzie w stanie przygotować własną wersję takiego kroczącego stwora. Na koniec, dla porównania, warto sprawdzić jak z budową "mrówki" poradzili sobie inżynierowie z firmy FESTO, którzy znany są z konstruowania niesamowitych robotów:
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.

























Trwa ładowanie komentarzy...