Kursy • Poradniki • Inspirujące DIY • Forum





Wpisy z tagiem: kalman
Filtr Kalmana w praktyce – 3 przykłady z kodami!
W artykule, postaram się opisać w prosty sposób filtr Kalmana. Zostanie tutaj podana minimalna dawka teorii, którą musimy dysponować aby zrozumieć jak działa filtr oraz jak go stosować.
Mam nadzieję, że udało mi się przedstawić to zagadnienie w sposób łatwy do zrozumienia.
Filtr Kalmana od teorii do praktyki – #3 – Testy na STM32
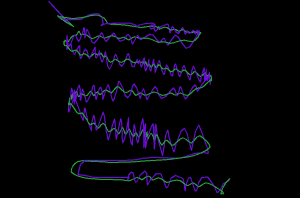
W poprzedniej części wyprowadziłem model stanowy dla systemu określającego położenie kątowe robota na podstawie danych z akcelerometru i żyroskopu. Zaprojektowałem filtr Kalmana dla tego modelu i sprawdziłem jego działanie z rzeczywistymi danymi pomiarowymi.
Teraz zajmę się przeniesieniem algorytmu na środowisko docelowe, czyli na STM32.
Filtr Kalmana od teorii do praktyki – #2
Poprzednio przybliżyłem teorię związaną z filtrem Kalmana oraz na przykładzie pokazałem reakcję filtru na zmiany poszczególnych parametrów.
Teraz zajmę się czymś bardziej praktycznym. Na podstawie danych pomiarowych z akcelerometru i żyroskopu postaram się zaprojektować filtr Kalmana dla układu śledzącego orientację robota w przestrzeni.
Filtr Kalmana od teorii do praktyki – #1 – Matlab
W niniejszej serii artykułów mam zamiar zająć się filtrami Kalmana. Zacznę od niezbędnej dawki teorii, by przejść do przykładów praktycznych.
Najpierw na podstawie rzeczywistych danych pomiarowych z czujnika zaprojektujemy filtr w Matlabie, a potem przeniesiemy implementację na mikrokontroler STM32.
Filtr Alfa – Beta od teorii do praktyki – #1
Zadaniem czujników jest dostarczanie informacji o położeniu robota oraz innych obiektów.
Dane te są przekazywane do algorytmów sterowania. Sygnały z czujników obarczone są błędem. Aby uzyskać dokładniejsze informacje na temat stanu obiektu należy dokonać jego estymacji na podstawie danych pomiarowych.






Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.




