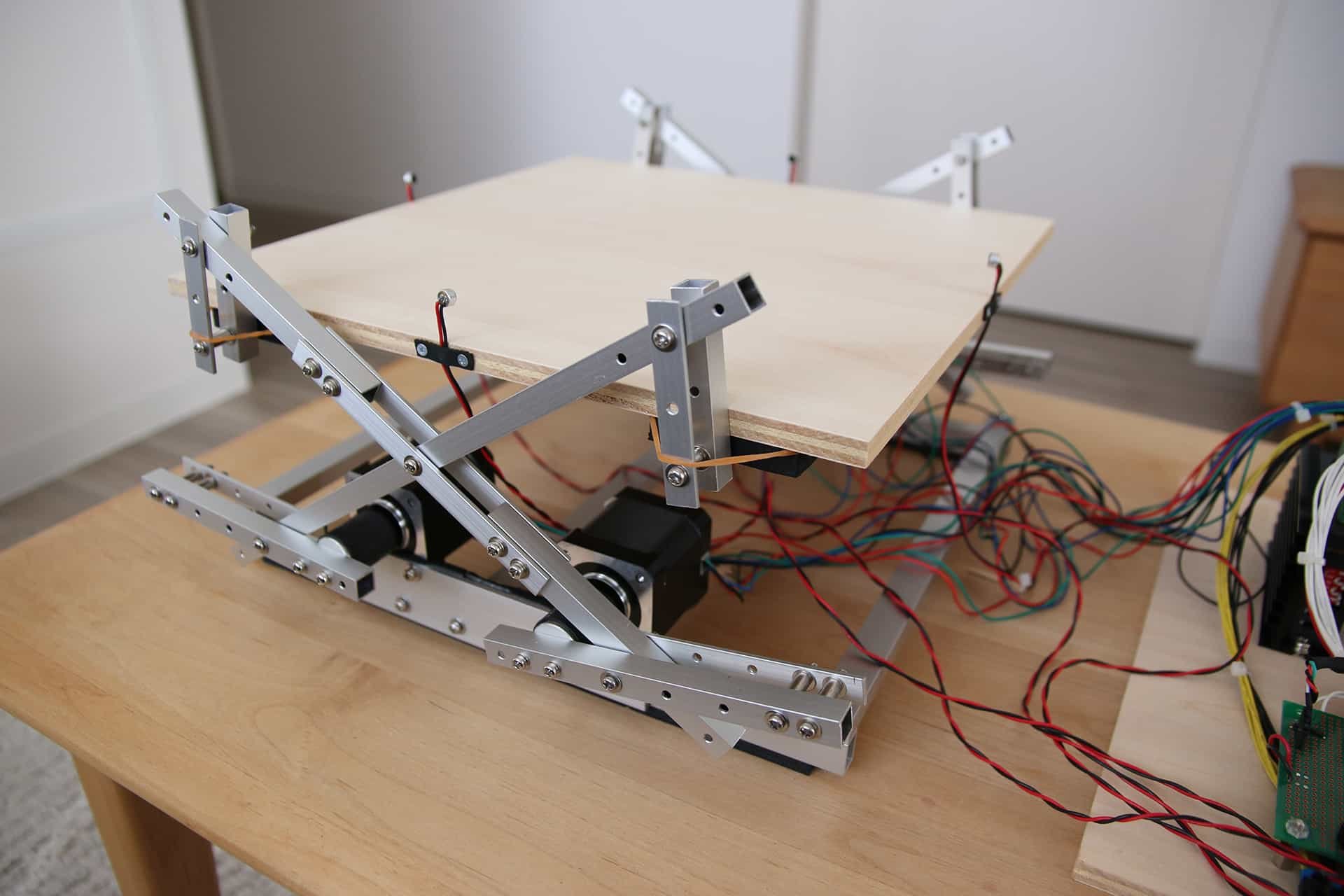
Położenie piłeczki jest wyznaczane za pomocą 4 mikrofonów umieszczonych na ruchomej platformie. Jedna para mikrofonów wykorzystywana jest do lokalizacji w osi X, a druga w osi Y. Uderzenie piłki w ruchomy stół ze sklejki jest bardzo głośne i wyraźne - dźwięk ten jest bez żadnego problemu rejestrowany przez mikrofony. Lokalizacja piłki jest określana na podstawie różnicy w czasie, w którym dany czujnik odnotował dźwięk uderzenia.
Ruchoma platforma z zamontowanymi mikrofonami.
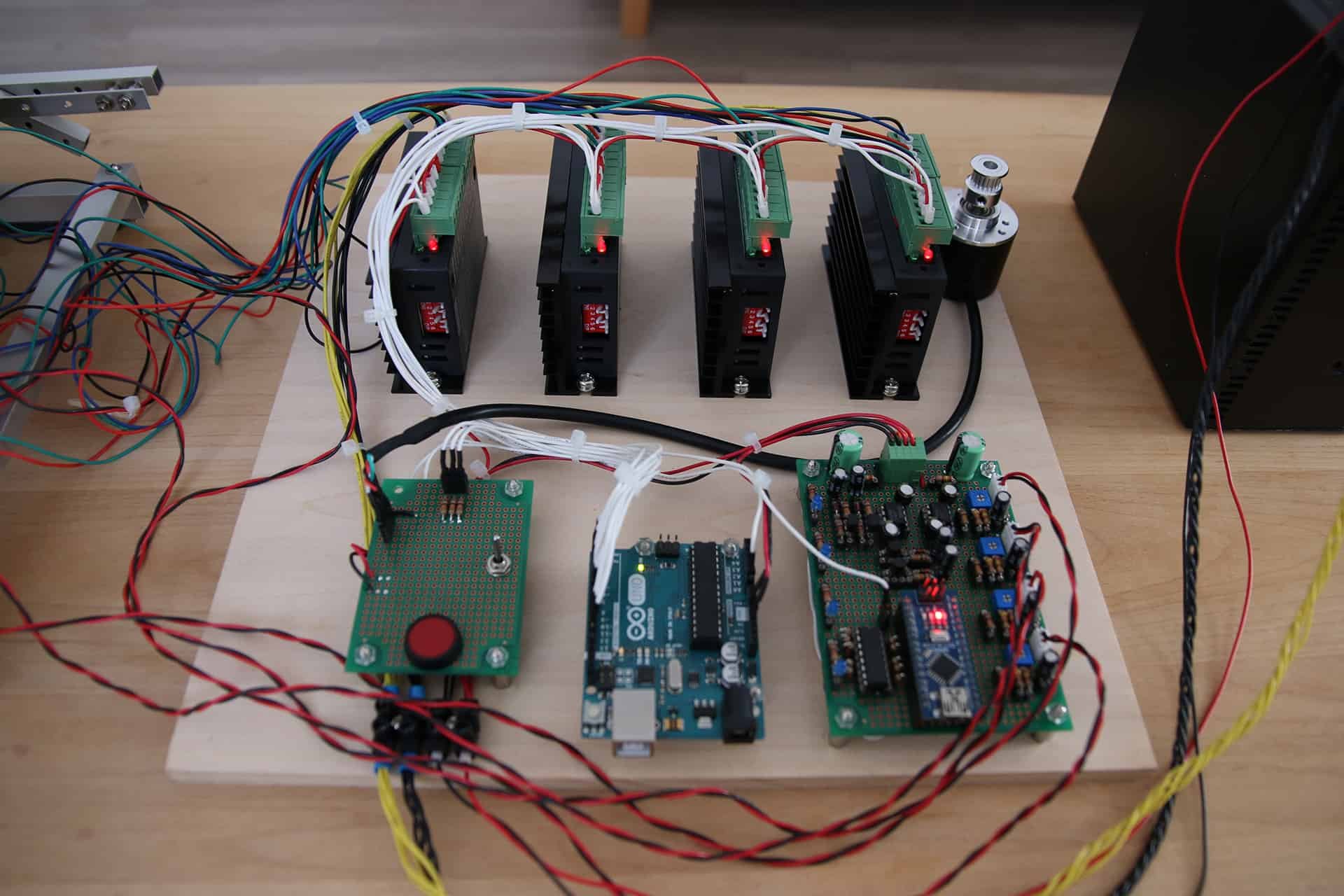
Każda mikrofon podłączony jest do przerzutnika. Sercem urządzenia jest Arduino Nano, które sprawdza stany przerzutników i resetuje je, gdy na wyjściu wszystkich znajduje się logiczna jedynka. Zadaniem programu jest jak najczęstsze sprawdzanie wyjść przerzutników. Jeśli przykładowo lewy mikrofon zarejestruje dźwięk to Arduino zaczyna odliczać cykle do momentu aż drugi mikrofon z pary wykryje ten sam dźwięk. Jak podaje autor projektu, różnica może wynosić do 200 cykli.
Obliczona różnica mieści się zawsze w przedziale od -200 do 200 cykli, gdzie 0 oznacza sytuację, w której oba mikrofony wykryły uderzenie piłeczki idealnie w tej samej chwili.
Elektronika sterująca platformą.
Na podstawie takich informacji obliczana jest pozycja piłeczki na ruchomym stole, która następnie jest przesyłana przez UART do drugiego Arduino. Zadaniem drugiego kontrolera jest odpowiednie wysterowanie 4 silników krokowych napędzających platformę. Pochylenie platformy jest wynikiem pracy dwóch regulatorów PID.
Ważnym etapem projektu okazało się również przygotowanie odpowiedniej biblioteki sterującej silnikami. Większość gotowych bibliotek niestety nie mogła być tutaj wykorzystana w związku z tym, że były one przygotowane do liniowego przyspieszania silników. Potrzebowały również stosunkowo dużo czasu, aby zmienić kierunek obrotów napędu. Autor projektu przygotował własną bibliotekę, która generuje sygnały sterujące w sposób umożliwiający znacznie płynniejszą kontrolę - więcej na ten temat znaleźć można na stronie projektu.
Konstrukcja napędzana jest silnikami krokowymi.
Wykorzystanie mikrofonów to niejedyny pomysł tego konstruktora. Wcześniej próbował on zbudować podobne urządzenie z wykorzystaniem diod i fototranzystorów:
Jeśli jesteście zainteresowani wykonaniem podobnego projektu to na pewno ucieszy Was fakt, że autor dość dokładnie udokumentował poszczególne etapy budowy tego "robota" na swoim blogu. Co więcej, wszystkie programy zostały udostępnione na GitHubie.
Dołącz do 20 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 20 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.


















Trwa ładowanie komentarzy...