Kursy • Poradniki • Inspirujące DIY • Forum





Wpisy z kategorii: Artykuły, strona 42
Sterowanie robotem mobilnym klasy (2,0)
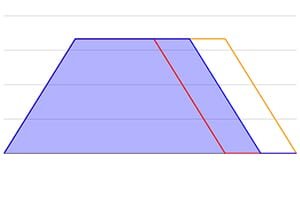
Problem sterowania robota wyposażonego w dwukołowy napęd różnicowy, nazywanego też robotem mobilnym klasy (2,0), prawdopodobnie dosięgnie z czasem większość osób zajmujących się robotyką amatorską.
Do tej klasy robotów zalicza się bowiem dużą cześć tworzonych konstrukcji: linefollowery, micromouse i wszelkiej wielkości sumo.
Podstawy mikrokontrolerów PIC. Bity konfiguracyjne.
Projektowanie elektroniki wymaga nie lada umiejętności przewidywania problemów na różnych stadiach rozwoju urządzenia. Bardzo ważną kwestią jest sposób oprogramowania mikrokontrolera i sprzęgniętych z nim modułów.
W tym artykule zajmiemy się wybranymi bitami konfiguracji w układach PIC firmy Microchip.
Filtr Alfa – Beta od teorii do praktyki – #2
W poprzednim artykule przedstawiłem teorię dotyczącą filtrów alfa-beta. Wykonałem również symulacje w Matlabie demonstrujące wpływ nastaw na zachowanie filtru. Teraz przyszła pora na implementację filtru na mikrokontrolerze.
W projekcie wykorzystałem płytkę STM32F4 Discovery i moduł MiniIMU v2 od Pololu.
Sprawdzone sposoby na zasilanie mikrokontrolera

Niniejszy artykuł jest podstawowym kompendium wiedzy nt. różnego typu źródeł zasilania oraz regulowania napięcia. Tekst jest przeznaczony głównie dla początkujących.
Artykuł omawia najważniejsze aspekty zasilania układów wyposażonych w mikrokontroler.
Przewodnik instalacji Linuxa na platformie embedded
W pierwszej części artykułu opisałem możliwość użycia taniego netbooka w roli sterownika robota. Zgodnie z zapowiedzią w kolejnym wpisie przedstawiam instrukcję instalacji Linuxa na wybranej wcześniejszej platformie.
Do dalszej pracy niezbędne są: bootloader, jądro linuxa, system plików oraz kompilator (toolchain).
Jak czytać schematy urządzeń elektronicznych?

Niniejszy artykuł jest poradnikiem dla kompletnie początkujących, którzy szukają wskazówek na temat tego jak czytać schematy.
Najprościej mówiąc schemat elektryczny to opis układu elektronicznego. Tworzy się go jednak nie przy użyciu słów, a stosując uniwersalne symbole i oznaczenia elektryczne.
RFM12B – #3 – zaawansowana komunikacja

W ostatniej części naszego kursu, transmisji bezprzewodowej na RFM12B, zajmiemy się obsługą nadawania oraz odbierania w tle.
Na koniec wreszcie uruchomimy komunikację w obu kierunkach.
RFM12B – #2 – Koniec ciszy w eterze

Poprzednio zakończyliśmy na podłączeniu modułu RFM12B do procesora i sprawdzeniu komunikacji po magistrali SPI.
Teraz już czas najwyższy na przesłanie informacji pomiędzy dwoma modułami. Zatem do dzieła!
Filtr Alfa – Beta od teorii do praktyki – #1
Zadaniem czujników jest dostarczanie informacji o położeniu robota oraz innych obiektów.
Dane te są przekazywane do algorytmów sterowania. Sygnały z czujników obarczone są błędem. Aby uzyskać dokładniejsze informacje na temat stanu obiektu należy dokonać jego estymacji na podstawie danych pomiarowych.






Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.




