W artykule chciałbym przedstawić, zagadnienia, związane ze silnikami elektrycznymi, które z pewnością już znacie. Artykuł ten kieruję jednak do osób początkujących, które rozpoczynają, wspaniałą przygodę z robotyką i automatyką.
Bardziej doświadczone osoby proszę, aby potraktowały ten tekst jako małą powtórkę dotyczącą silników elektrycznych.
Chciałbym, abyś po przeczytaniu tego materiału wiedział, co w trawie piszczy. Jeżeli ktoś Cię zapyta, jak działa silnik elektryczny? Jak jest zbudowany? To odpowiesz bez chwili zastanowienia.
Już na samym początku uprzedzam, że ten artykuł będzie z kategorii tych dłuższych, jednakże jak wcześniej wspomniałem postaram się poruszyć niemalże wszystkie zagadnienia. Począwszy od tego, co to jest silnik elektryczny, jak jest zbudowany, poprzez zasadę działania oraz rodzaje silników, przejdziemy także o zagadnienie sterowania silnikiem DC z poziomu mikrokontrolera.
Nie obawiaj się, może to z początku wydaje się straszne. Zaufaj mi proszę, postaram się pokazać Ci te wszystkie zagadnienia, niczym Wergiliusz, pokazał piekło Dantemu. To wszystko słowem wstępu, mam nadzieję ,że was nie znudziłem.
Czym właściwie jest silnik?
Już tłumaczę, zaglądając bezpośrednio do Internetu, czy podręczników dowiemy się, że mianem silnika elektrycznego określa się maszynę zdolną zamienić energię elektryczną w energie mechaniczną, za pomocą pola magnetycznego. Oczywiście wyróżniamy bardzo wiele odmian silników, mogą się one różnić budową, kształtem i zastosowaniem. Jednak zasada działania sprowadza się do tego samego, czyli wykorzystania pola magnetyczne do obrotu wału. Kto wynalazł silnik elektryczny? Prototyp został stworzony w 1822 roku przez angielskiego matematyka i fizyka Petera Barlowa, zaś pierwszy działający silnik zbudował i opatentował w 1837 roku Thomas Davenport.
Silniki szczotkowe prądu stałego i zmiennego
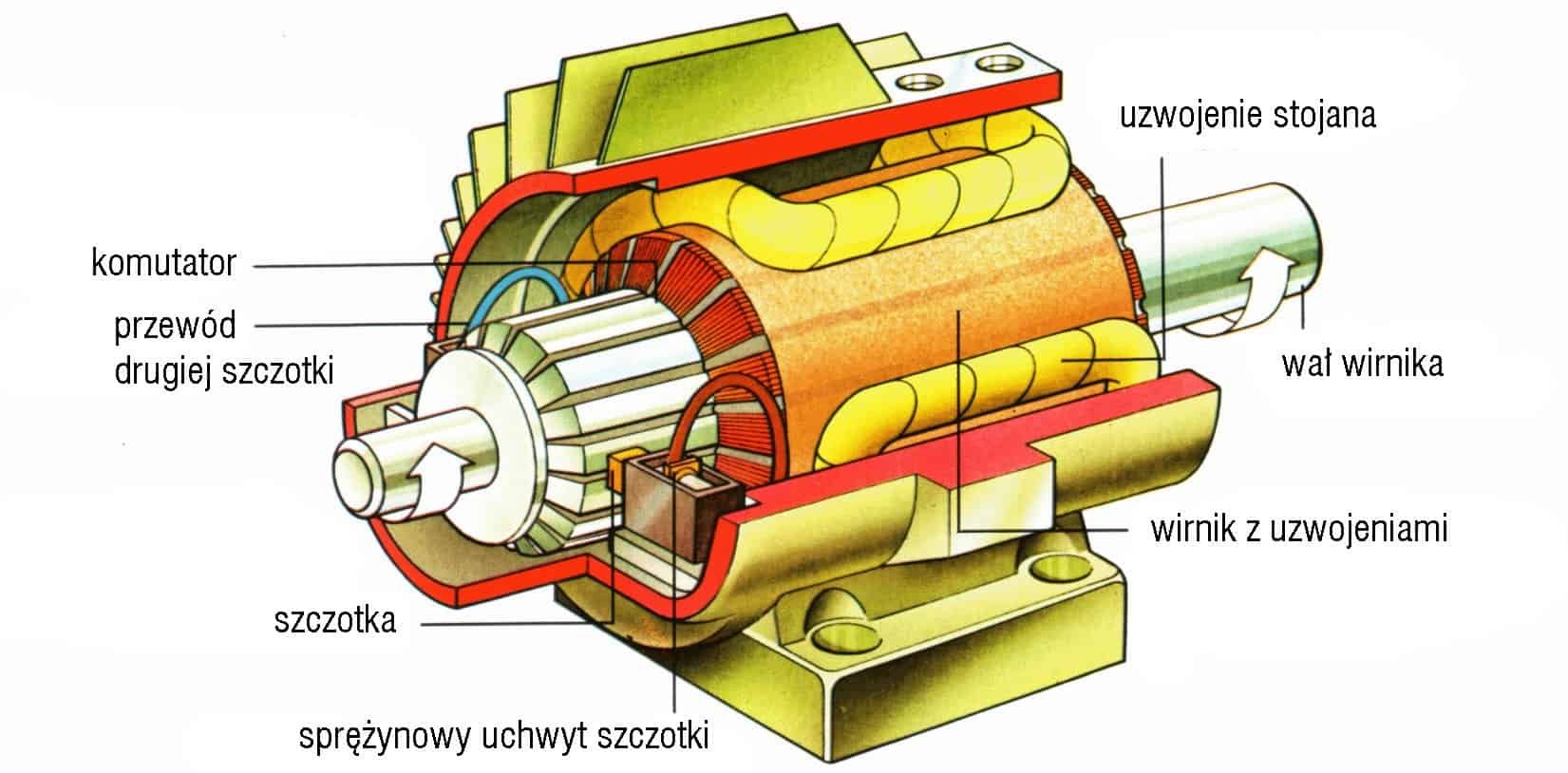
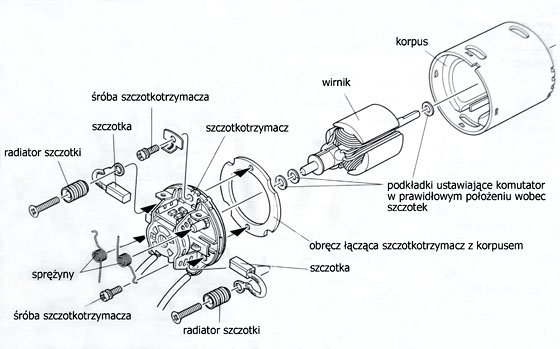
Z czego składa się silnik elektryczny? Budowa silnika elektrycznego komutatorowego. Podstawowymi parametrami silników elektrycznych są:
prędkość obrotowa
moment obrotowy
Zmiennymi w tych silnikach są odpowiednio dobrane uzwojenia (grubości drutu nawojowego oraz ilości zwojów). Dodatkowo można zastosować sterowniki elektroniczne np. tyrystorowe, gdzie prędkość obrotowa wału wirnika jest płynnie regulowana potencjometrem, a straty mocy są praktycznie nie zauważalne. Innym sposobem regulacji momentu i prędkości są przekładnie mechaniczne, o których więcej w osobnym artykule.
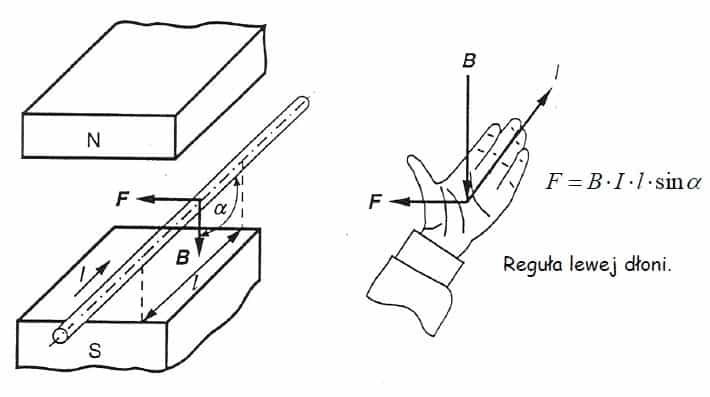
Moment obrotowy w silnikach elektrycznych powstaje na skutek oddziaływania pól magnetycznych wytworzonych przez stojan i wirnik. Pole magnetyczne pojawia się w wyniku płynącego prądu elektrycznego. Oddziaływanie to jak wiemy z lekcji fizyki, zależy od strumienia magnetycznego w którym znajduje się przewód oraz wartości prądu i usytuowanego go względem silni pola magnetycznego. W silnikach elektrycznych prądu stałego zewnętrzne pole magnetyczne jest wytwarzane na dwa sposoby, w przypadku silników małej mocy za pomocą magnesów trwałych, drugi sposób polega na stosowaniu uzwojeń tzw. stojana to rozwiązanie możemy natomiast spotkać np. w wiertarkach, zasilanych akumulatorowo.
Znajdujący się w polu magnetycznym, wirnik, który z kolei podobnie jak stojan zbudowany jest z wielu uzwojeń. W tradycyjnych rozwiązaniach uzwojenie wirnika znajduje się w specjalnie przygotowanych wyżłobieniach rdzenia, tj. w żłobkach. Rdzeń jest wykonany z materiału ferromagnetycznego (czyli specjalnego gatunku stali, który charakteryzuje się dużą przenikalnością magnetyczną). Uzwojenia stojana również są nawinięte na rdzeniu ferromagnetycznym, między stojanem, a wirnikiem musi znajdować się szczelina powietrzna i powinna być ona jak najmniejsza.
Zasada działania silnika elektrycznego
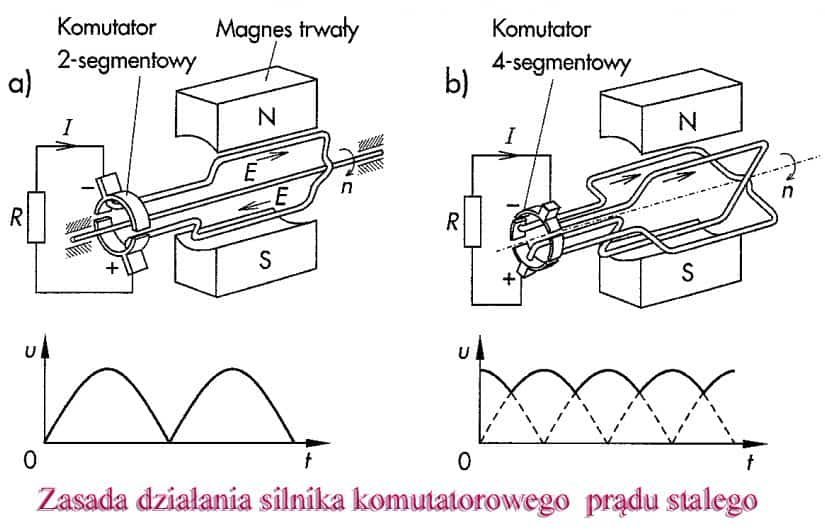
Prąd elektryczny jest doprowadzany do wirnika za pomocą komutatora. To po nim ślizgają się dwie grafitowe szczotki (stąd nazwa, a grafit jest wykorzystywany ze względu na swoja ścieralność) szczotki są bezpośrednio połączone z zasilaniem. W wyniku płynącego prądu przez wirnik powstaje wokół niego pole magnetyczne, którego biegun N jest za wirnikiem , a biegun S przed wirnikiem. Bieguny jednoimienne magnesu trwałego i wirnika odpychają się, a różnoimienne przyciągają się, czego skutkiem jest powstanie ruchu obrotowego. Komutator ma odizolowane działki, w związku z tym prąd nie płynie przez pewien czas, jednak nie wpływa to na ruch wirnika, gdyż w tym momencie wykona on półobrotu pod wpływem siły bezwładności.
Rysunki poniżej pokazują jak w uproszczeniu działa silnik elektryczny:
Komutator czyli mechaniczny prostownik prądu
Umożliwia on przekształcenie prądu przemiennego na stały. Zbudowany jest z odizolowanych półpierścieni osadzonych wraz z wirnikiem na tej samej osi. Komutacją nazywamy zespół zjawisk związanych ze zmianą kierunku prądu w zezwoju zwartym przez szczotki. Proces ten zachodzi, gdy zezwój ten jest przełączany z jednej gałęzi twornika do drugiej w związku z obrotem wirnika. W przypadku idealnym, zmiana prądu w cewce w funkcji czasu zależy tylko od rezystancji przejścia pomiędzy szczotką, a sąsiednimi wycinkami komutatora i wyraża się zależnością:
gdzie, T oznacza czas komutacji.
Wiemy już czym jest zjawisko komutacji, ale co ciekawe wyróżniamy trzy rodzaje komutacji, jedna którą właśnie opisałem, oraz dwie kolejne komutację przyśpieszoną, oraz opóźnioną.
Komutacja przyspieszona: to taka, przy której zmiana prądu w cewce następuje już w pierwszej połówce okresu komutacji. Komutacje przyspieszoną otrzymuje się wówczas, gdy zwartym przez szczotkę zwoju będzie indukowana siła elektromotoryczna rotacji. W przypadku silnika zwrot indukowanej siły elektromotorycznej powinien być zgodny ze zwrotem siły indukowanej przez ten biegun, spod którego oczywiście zwój wychodzi.
Komutacja opóźniona: pojawia się, jeśli w połowie okresu komutacji prąd jest większy od zera. Czynnikiem, który dodatkowo opóźnia komutację, jest oddziaływanie twornika. Komutacja opóźniona jest bardzo niekorzystna, gdyż szczotka schodząca z wycinka komutatora w chwili, gdy prąd w cewce nie zdążył osiągnąć wartości prądu w gałęzi, taki stan rzeczy może spowodować pojawienie się łuku elektrycznego, jeżeli łuk ten przedostanie się na dalsze wycinki, to dojdzie do zwarcia komutatora, a jednocześnie do unieruchomienia naszego silnika.
Zauważ że: zła komutacja wywołuje iskrzenie, które może prowadzić do zniszczenia szczotek i komutatora. Komutację uważa się za zadowalającą, gdy szczotki nie iskrzą. Rozróżnia się mechaniczne i elektryczne przyczyny iskrzenia szczotek. Do przyczyn mechanicznych zalicza się przede wszystkim nierównomierność powierzchni, zanieczyszczenie lub nie centryczność komutatora, złe przyleganie szczotek oraz ich drgania. Natomiast do przyczyn elektrycznych zaliczamy gęstość prądu na styku między szczotką, a komutatorem. Podstawą do oceny komutacji jest tzw. krzywa komutacji przedstawiająca przebieg prądu w okresie komutacji.
Najbardziej korzystna jest tzw. komutacja prostoliniowa, w czasie której zmiana prądu w zezwoju zwartym przez szczotkę przebiega liniowo, a przy tym w połowie okresu komutacji prąd jest równy zeru (poniższy rysunek).
Przebieg prądu w okresie komutacji:
komutacja prostoliniowa
komutacja opóźniona
komutacja przyspieszona
komutacja idealna
Rodzaje silników komutatorowych
Szeregowy: nazwa pochodzi od sposobu połączenia uzwojeń wirnika i stojana. Wysokie obroty tego silnika elektrycznego to jego cecha charakterystyczna. Prędkość obrotowa jest zależna od obciążenia, dlatego też silnik ten NIE MOŻE PRACOWAĆ BEZ OBCIĄŻENIA! Ponieważ jeżeli podłączymy taki silnik bez obciążenia, to cały czas jego prędkość obrotowa będzie rosła, aż do nieskończoności. Skutkiem tego będzie trwałe uszkodzenie silnika! Mimo to znalazł zastosowanie głównie w trakcji elektrycznej (napędy lokomotyw, tramwajów, trolejbusów) oraz w pojazdach mechanicznych (wózki akumulatorowe, rozruszniki samochodów), w napędach dźwigów, wentylatorów itp.
Bocznikowy (inaczej równoległy) jak się już pewnie domyślasz jego uzwojenia są połączone w sposób równoległy. Charakteryzuje się małą podatnością na zmianę prędkości obrotowej na skutek zmiany obciążenia. Stosowany jest głównie w napędach obrabiarek, pomp, dmuchaw, kompresorów;
Szeregowo-bocznikowy posiada uzwojenie wzbudzenia w stojanie połączonym z uzwojeniem twornika w sposób mieszany (część szeregowo, a część równolegle). Charakteryzuje się brakiem głównej wady silnika szeregowego – możliwości jego rozbiegania przy braku obciążenia, a także ma jego zalety – duży moment obrotowy w szerokim zakresie obrotów i zależność prędkości obrotowej od obciążenia. Stosowany jest zazwyczaj jako silniki dużych mocy, tam gdzie występuje ciężki rozruch: do napędu walcarek, pras, dźwigów oraz w napędach okrętowych mechanizmów pokładowych.
Na zakończenie części o silnikach szczotkowych, chciałbym poruszyć jeszcze temat sterowania prędkością obrotową takiego silnika:
regulacja prędkości poprzez włączenie dodatkowej rezystancji w obwód twornika spowoduje zmniejszenie prędkości obrotowej
regulacja prędkości poprzez włączenie dodatkowej rezystancji w obwód wzbudzenia (stojana) spowoduje zwiększenie prędkości obrotowej
regulacja prędkości poprzez zmianę napięcia zasilania (np. za pomocą tyrystorowych regulatorów napięcia)
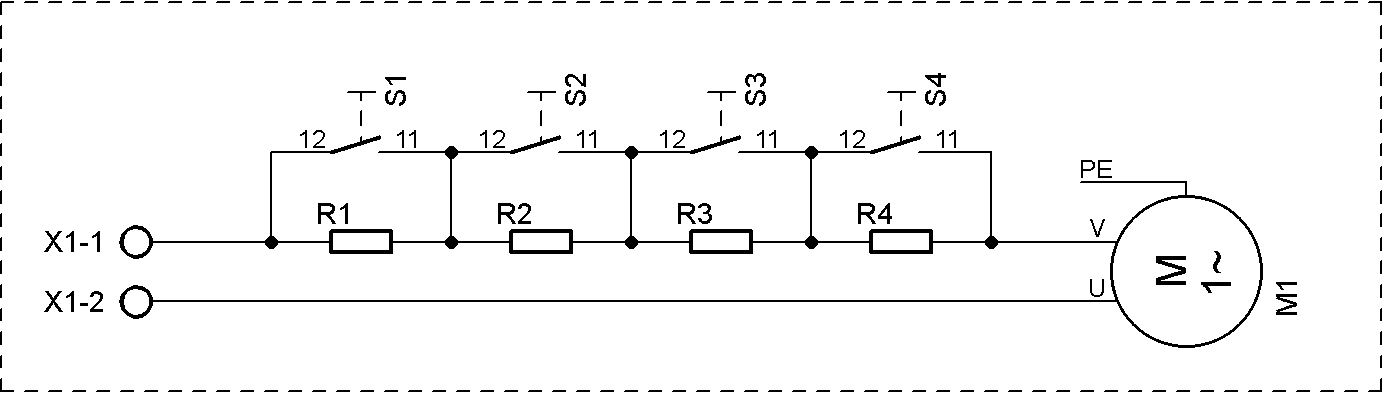
Podczas rozruchu silnik elektryczny pobiera z sieci prąd kilkakrotnie większy od prądu znamionowego, podczas rozruchu E=0 więc prąd rozruchowy obliczmy zgodnie z prawem Ohma.
Aby zmniejszyć prąd rozruchowy, najczęściej w silnikach dużej mocy stosuje się tzw. Rozrusznik, czyli rezystancje dekadową, która jest wpięta szeregowo w uzwojenie wirnika, składa on się z szeregowo połączonych rezystorów zwieranych włącznikiem odśrodkowych lub za pomocą przekaźnika czasowego.
Podsumowując I część artykułu
silniki komutatorowe (szczotkowe) mogą być zasilanie zarówno prądem stałym jak i zmiennym pod warunkiem, że prąd twornika Ia oraz prąd stojana If zmienia swój kierunek w tym samym czasie
warunek ten na pewno jest spełniony w silniku szeregowym
silnik szeregowy nazywamy również silnikiem uniwersalnym
w silniku bocznikowym można również zastosować zasilanie prądem zmiennym, należy jednak skompensować znacznie większą indukcyjność stojana za pomocą odpowiednio dobranej pojemności, czyli kondensatora, połączonego szeregowo z uzwojeniem stojana
Silniki bezszczotkowe (BLDC)
Jak się już zapewne domyślasz, ten rodzaj silnika nie będzie zawierał szczotek, a związku z tym także komutatora. Silniki elektryczny bezszczotkowy, poza ceną, wydają się mieć same zalety, nie mają części, które mogą się zużywać. Dzięki temu silniki te pracują długotrwale i bezobsługowo.
Znaczny wzrost popularności silników BLDC związany jest z wieloma zaletami tego typu maszyn, do których możemy zaliczyć:
prostą budowę silnika, duży stosunek momentu do masy silnika, duża sprawność, prosty układ sterowania, sterowanie w szerokim zakresie prędkości, bardzo dokładną regulację prędkości bez dodatkowych kosztów finansowych, wysoki moment rozruchowy, niskie koszty obsługi, brak szczotek (silnik staje się cichy, niezawodny, brak zużywania mechanicznego oraz przewodzącego pyłu)
Do najczęściej wymienianych wad tego silnika należą: tętnienia momentu elektromagnetycznego, wysoki koszt magnesów trwałych konieczność stosowania czujników położenia wału, co w znacznym stopni wpływa na cenę układu napędowego.
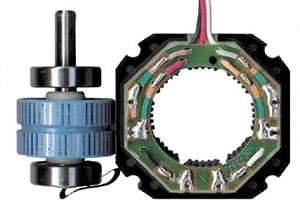
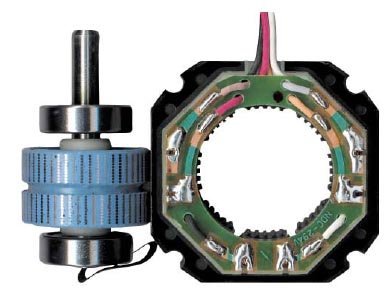
Z czego zbudowany jest silnik elektryczny BLDC? Jego budowa znacząco różni się od rozwiązań konstrukcyjnych stosowanych w innych maszynach elektrycznych. Wśród jego podstawowych elementów składowych można wyróżnić wirnik oraz stojan. Moment napędowy powstaje w wyniku współdziałania pola magnetycznego wirnika i stojana. W odróżnieniu od tradycyjnych silników wirnik wytwarza stałe w czasie pole magnetyczne pochodzące z magnesów stałych. Pole magnetyczne stojana indukowane jest w uzwojeniach skojarzonych w odpowiednie grupy. Największą zaletą silnika BLDC jest brak konieczności stosowania komutatora, dzięki czemu nie występuje zjawisko komutacji oraz straty energii w wyniku przepływu prądu przez szczotki o stosunkowo dużej rezystancji. Wirnik oraz uzwojenia stojana i sposób ich połączenia poniższy rysunek:
Ruch wirnika możliwy jest dzięki wirującemu polu magnetycznemu stojana. Obroty wirnika są ściśle zależne od częstotliwości zmian pola stojana. W praktyce do sterowania wykorzystuje się układ elektronicznego komutatora a obrót wirnika podzielony jest na sześć faz, w których zasilanie kolejnych uzwojeń przełączane jest w taki sposób aby pole w obwodzie magnetycznym stojana zmieniało swoje położenie o pewien stały kąt wynikający z ilości biegunów.
Układ sterowania realizowany jest zazwyczaj w postaci końcówki mocy opartej na tranzystorach przełączających, których ilość jest uzależniona od liczby uzwojeń stojana. Realizuje on podstawowe funkcje takie jak zmiana prędkości obrotowej, regulacja przyspieszenia, oraz analizowanie informacji o położeniu wirnika pochodzące ze sprzężenia zwrotnego.
Problem przy sterowaniu silnikiem BLDC sprowadza się zazwyczaj do określenia stanu łączników jako funkcji informującej nas o położeniu kątowego wału, czyli mówiąc pokrótce do wyznaczenia chwili przełączenia. Wyznaczenie położenia może się odbywać na podstawie sygnałów pochodzących z czujników magnetycznych tzw. Hallotronów, które znajdują się w szczelinach, rozmieszczone względem siebie o 120 stopni. Zaletą takiego rozwiązania jest fakt, że sygnały te przychodzące z czujników są wykorzystywane, za pomocą prostego układu logicznego do sterowania pracą przełączników.
Jednakże sterowanie to ma także swoje wady, a należy do nich sama obecność zastosowanych sensorów, ponieważ są to delikatne czujniki. Ale czy to oznacza, że silnikami BLDC jest ciężko sterować?
Otóż wcale nie, obok sterowania za pomocą czujników, istnieje również inne. Polega ono na tym, że obliczane są chwile przełączenia łączników na podstawie prądów i napięć pochodzących z uzwojeń naszego silnika. Oczywiście stosuje się kilka metod sterowania, postaram dołożyć się wszelkich starań, abyś mógł je po części poznać.
W pierwszej metodzie wykorzystujemy siłę elektromotoryczną indukowaną w fazie silnika, bardzo łatwo można ją zmierzyć, kiedy silnik jest wyłączony. Można wyznaczyć również czas przejścia tej siły przez zero i po odpowiednim przesunięciu tych sygnałów, a dokładniej o ¼ okresu wykorzystać je do sterowania pracą łączników, niestety metoda ta ma jednak bardzo istotne ograniczenie, ponieważ na postoju indukowana siła elektromotoryczna jest równa zeru, co dyskwalifikuje tę metodę.
Druga metoda bezczujnikowego sterowania silnikiem BLDC, polega na obserwowaniu stanu silnika. W tym przypadku tworzony jest matematyczny model układu bieżąco korygowanego na podstawie sygnałów rzeczywistych prądów i napięć pochodzących z maszyny. Z tego też modelu otrzymujemy sygnały pozwalające na sterownie pracą łączników. Zastosowanie modelu matematycznego niesie za sobą dodatkowe korzyści, mam tu na myśli uzyskanie dodatkowych wielkości fizycznych, wykorzystanych później w sterowaniu pracą silnika. Jednakże obróbka tych sygnałów wymaga dużej mocy obliczeniowej.
Na zakończenie II części pracy chciałbym dodać, że gabaryty i ciężar silnika BLDC zależą od rozwijanego momentu obrotowego, a moc mechaniczna jak już wcześniej zapewne wspomniałem jest iloczynem momentu obrotowego i prędkości obrotowej, więc łatwo się domyślić, że maszyny szybkoobrotowe, są mniejsze i lżejsze niż silniki elektryczne wolnoobrotowe.
Taka możliwość pracy tych silników otwiera przed nimi bardzo duże pole zastosowań, w których decydujący głos ma ciężar silnika jak np. w sprzęcie przenośnym, dyskach twardych. Silniki te są zazwyczaj stosowane tam gdzie wymagana jest niska awaryjność, małe gabaryty, oraz duża sprawność, a więc zastosowania w technice wojskowej czy też lotniczej.
Warto także zauważyć że budowa silnika bezszczotkowego jest bardzo zbliżona do budowy silnika synchronicznego z magnesami trwałymi, jednak główna różnica polega na ty że silnik BLDC charakteryzuje się prostokątnym rozkładem indukcji w szczelinach, o tyle silnik synchroniczny jest budowany przy założeniu sinusoidalnego rozkładu pola magnetycznego w szczelinie. Oczywiście skutkiem tego są inne systemy sterowania np. silniki synchroniczne prądu zmiennego, mogą być silnikami elektrycznymi trójfazowymi lub jednofazowymi. Przy silnikach elektrycznych jednofazowych wykorzystuje się kondensator 16uF /400V elektrolityczny, który przesuwa fazę napięcia względem prądu o kąt 120 stopni, co wymusza ruch obrotowy.
Silniki Krokowe
Silnik krokowy (inaczej skokowy) to silnik, w którym impulsowe zasilanie prądem elektrycznym powoduje, że jego wirnik nie obraca się ruchem ciągłym, lecz wykonuje za każdym razem ruch obrotowy o ściśle ustalonym kącie. Dzięki temu prędkość kątowa wirnika jest dokładnie równa częstotliwości impulsów pomnożonej przez wartość kąta obrotu wirnika w jednym cyklu pracy silnika. Pozwala to w prosty sposób ustalić dokładnie położenie wału silnika krokowego bez stosowania zaawansowanych czujników jak w przypadku silników bezszczotkowych.
W zależności od budowy wyróżnia się trzy typy silników krokowych:
Silnik o zmiennej reluktancji VR (od ang. Variable Reluctance)
Silnik z magnesem trwałym PM (od ang. Permanent Magnet)
Silnik hybrydowy HB (od ang. HyBrid)
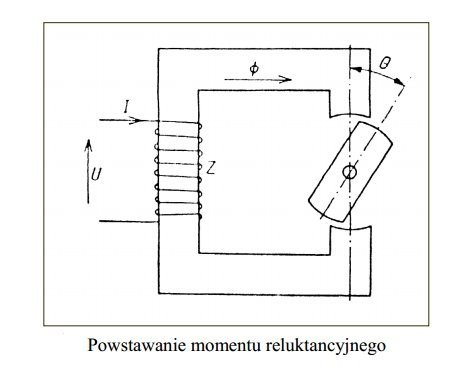
Silnik o zmiennej reluktancji: wśród jednosegmentowych silników krokowych, który posiada wirnik reluktancyjny, można wyróżnić pozostałe, w których to na jeden biegun stojana przypada jeden ząb wirnika oraz takie gdzie na jeden biegun stojana przypada kilka zębów. Oczywiście obydwie te odmiany mogą być wykonane w wariancie symetrycznym, bądź też nie symetrycznym.
Budowa symetryczna charakteryzuje się tym, że uzwojenia dwóch przeciwległych biegunów tworzą pasmo, natomiast budowa niesymetryczna charakteryzuje się, tym iż całe uzwojenie pasma jest umieszczone na jednym biegunie działanie silnika krokowego o wirniku reluktancyjnym opiera się na wykorzystaniu momentu reluktancyjnego. Silnik ten składa się natomiast z rotora o wielu zębach, a wykonany jest on z stali miękkiej i uzwojonego stojana. Kiedy uzwojenia stojana są zasilane prądem stałym, bieguny namagnesowywuja się, a ruch pojawia się na skutek przyciągania zębów rotora przez bieguny stojana. Zasadę działania przedstawiłem na rysunku poniżej:
Silniki krokowe o magnesach stałych mogą być wykonane w wersji jednosegmentowej i wielosegmentowej. Silnik jednosegmentowy może mieć na wirniku podobnie do klasycznej maszyny synchronicznej bieguny jawne lub utajone.
Silniki krokowe o magnesach trwałych na wirniku można również podzielić na magnesowane osiowo lub promieniowo. Silnik krokowy o wirniku czynnym często nazywany jest również silnikiem kubkowymi. Jest to silnik o wirniku wytwarzającym strumień magnetyczny i o stojanie z uzwojeniem sterującym.
Wirnik silnika stanowią magnesy trwałe. Silnik tego typu jest tani, charakteryzuje się niską rozdzielczością o typowych wartościach kąta 7,5 -15 (stopni) tj. 24-48 kroków na obrót. Rotor silnika nie posiada zębów, lecz jest namagnesowany naprzemiennie biegunami N i S tak, iż bieguny te są usytuowane w linii prostej równoległej do osi rotora. Namagnesowane bieguny rotora wpływają na zwiększenie indukcji magnetycznej, dlatego silnik z magnesem trwałym.
Silnik hybrydowy jest bardziej kosztownym niż silnik z magnesem trwałym cechuje się za to lepszymi parametrami jeśli chodzi o rozdzielczość i szybkość. Zasada działania silnika opiera się na tym, że magnes trwały umieszczony na wirniku lub na stojanie wytwarza jednako biegunowy strumień magnetyczny, który zamyka się w obwodzie magnetycznym: stojan-szczelina powietrzna -wirnik.
Po zasileniu uzwojenia stojana impulsem sterującym, wzbudzony strumień magnetyczny pod jednym biegunem stojana dodaje się do strumienia magnesów trwałych, pod drugim zaś odejmuje się. Wirnik zostaje wprowadzony w ruch tak, by osie zębów stojana i wirnika bieguna o strumieniu wzmacniającym pole magnetyczne pokryły się. Typowe kąty silnika hybrydowego mieszczą się w zakresie 3,6; -0,9 (stopni) tj. 100- 400 kroków na obrót. Silnik hybrydowy łączy w sobie zalety silnika ze zmienną reluktancją i silnika z magnesem stałym. Rotor silnika ma wiele zębów i posiada osiowa namagnesowane magnesy umieszczone koncentrycznie wokół osi. Zęby rotora zapewniają lepszą drogę przepływowi magnetycznemu co polepsza charakterystyki momentu spoczynkowego i dynamicznego w porównaniu z silnikami z magnesem stałym i reluktancyjnym.
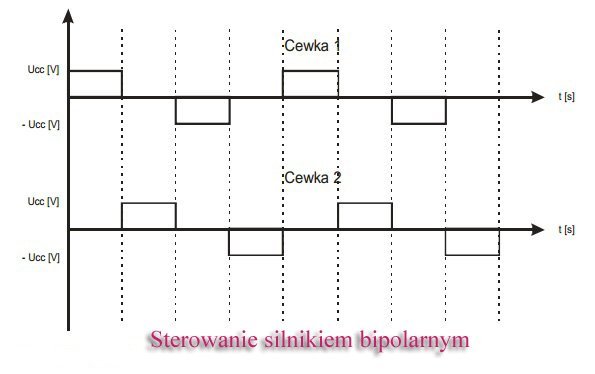
Właśnie poznaliśmy podział silników krokowych ze względu na budowę, ale okazuje się, że istnieje także podział ze względu na sposób sterowania, w tym przypadku silniki krokowe znów dzielimy na dwie grupy: unipolarne i bipolarne, ale już tu na wstępie zaznaczam, że różnica polega tylko i wyłącznie na innym podłączeniu cewek silnika, a co za tym idzie trochę innym sposobem sterowania, ale zaraz postaram się to wszystko po kolei Ci wyjaśnić.
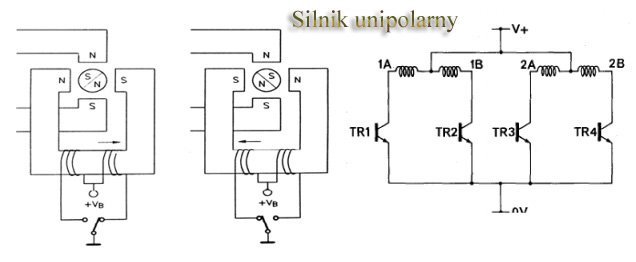
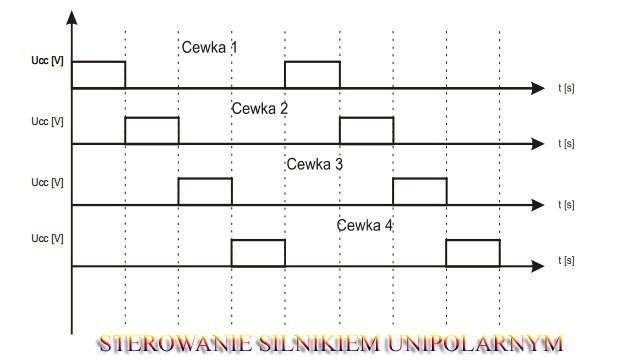
Silnik unipolarny budowa i sterowanie:
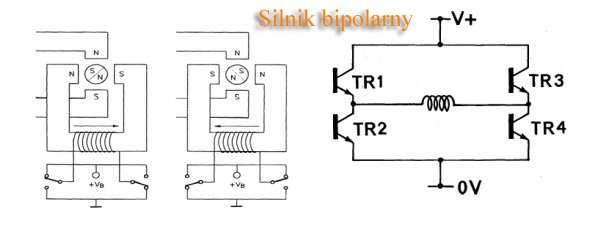
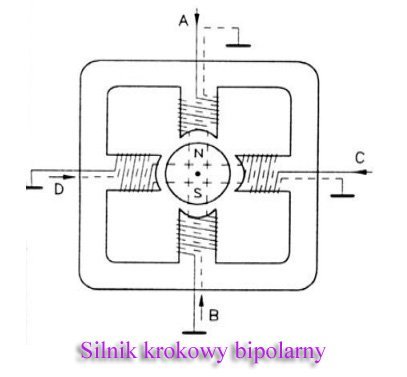
Silnik bipolarny budowa i sterowanie:
Nie opisuję już dokładnej zasady działania wyżej przedstawionych silników, ponieważ jak już pewnie zauważyłeś rysunki mówią same za siebie, i myślę że po gruntownym przestudiowaniu, tych obrazków, bez najmniejszych przeszkód sam zobaczysz o co chodzi
Podsumowując wiedzę zdobytą o silnikach krokowych można powiedzieć że:
Użycie silnika krokowego może być trafnym wyborem, w przypadkach, gdy wymagany jest kontrolowany ruch.
Mogą być one użyte tam, gdzie trzeba sterować kątem, prędkością, pozycją lub synchronizmem.
Z powodu wielu zalet małe silniki krokowe znalazły zastosowania w urządzeniach powszechnego użytku np. w drukarkach, ploterach, sprzęcie biurowym, napędach dysków, sprzęcie medycznym, faksach.
Stosowane równie często w napędach przemysłowych i wielu innych.
Dzięki sporemu momentowi na wyjściu mogą być stosowane zamiast silnika prądu stałego czy zmiennego z przekładnią, bez sterowania pozycją - podając tylko impulsy o odpowiedniej częstotliwości.
Dodatek
Sterowanie silnikiem komutatorowym prądu stałego z poziomu mikrokontrolera
Pewnie wielu z was teraz myśli, a dlaczego nie sterownie silnikiem krokowym? Muszę szczerze przyznać, że chciałem ten temat poruszyć, jednak nie posiadam żadnego silnika krokowego, więc nie chcę Ci podawać jakiś niepełnych i niesprawdzonych informacji.Myślę że sterowanie silnikiem prądu stałego jest również fascynującym zagadnieniem.
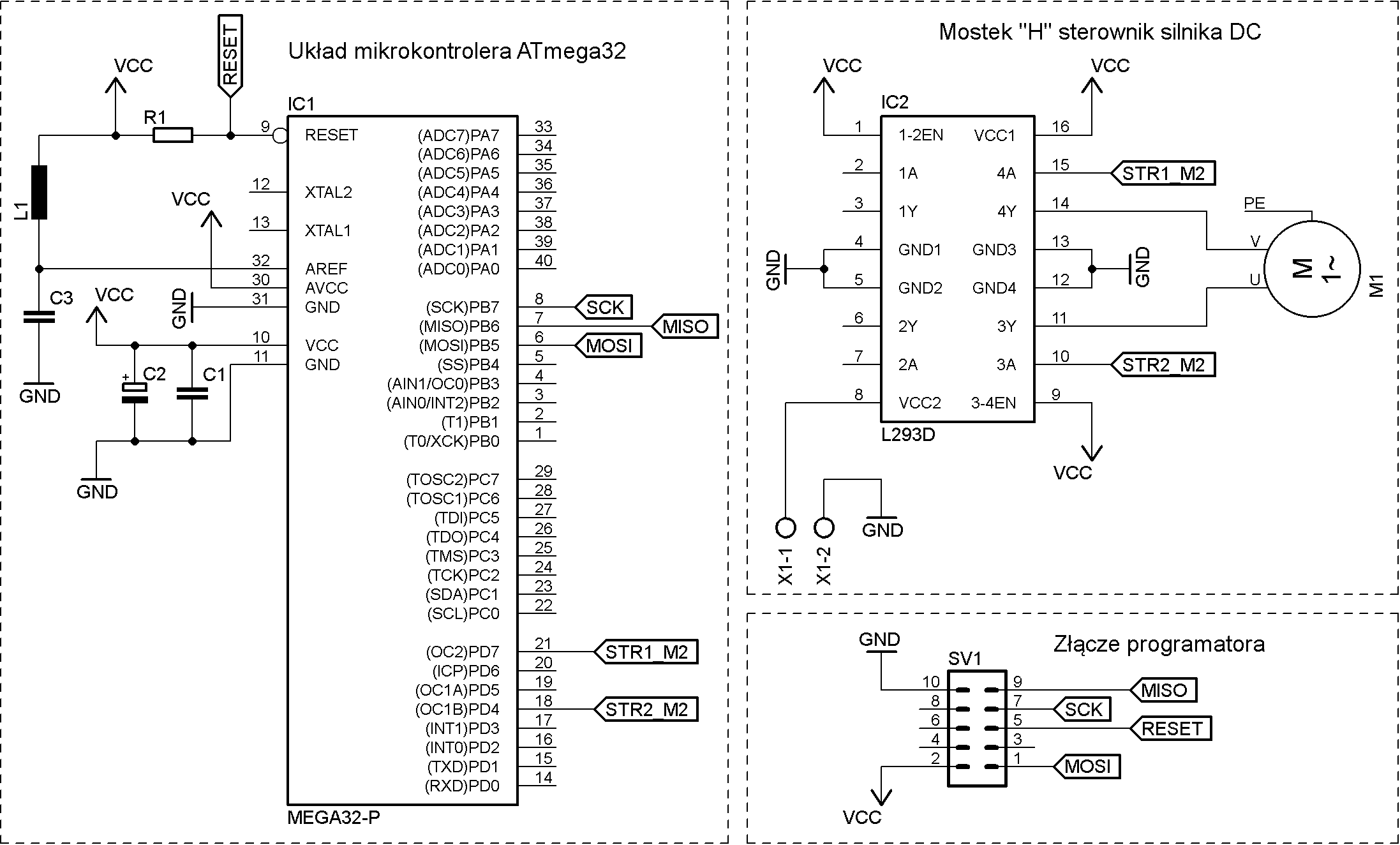
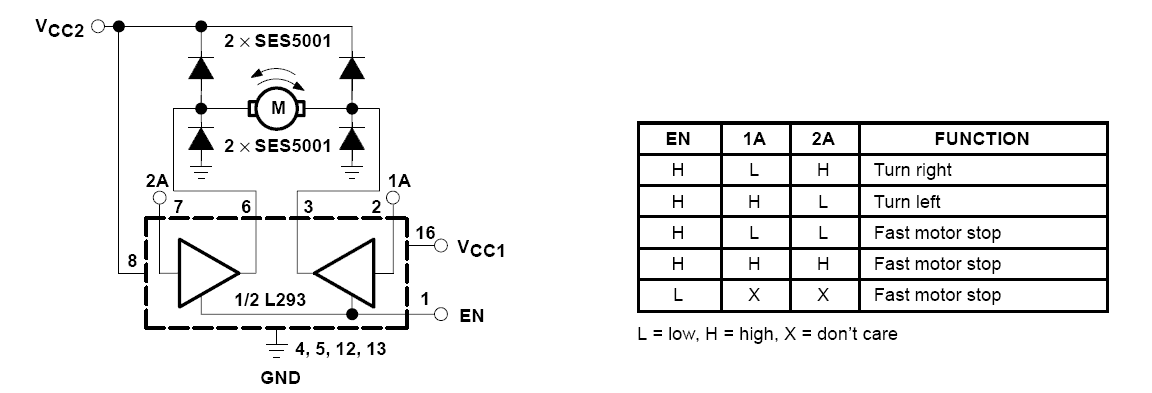
Aby przeprowadzić to ćwiczenie koniecznie musisz zaopatrzyć się w dowolny mikrokontroler z rodziny AVR (ja do przeprowadzenia ćwiczenia posłużę się mikrokontrolerem ATmega32). Potrzebny będzie nam również jakiś mostek H do sterowania silnikiem, ponieważ silnika nie możemy podłączyć bezpośrednio do pinów uC. Do przeprowadzenia ćwiczenia proponuję złożyć sobie układ według poniższego schematu (można oczywiście wykorzystać płytkę stykowa):
Jak z pewnością zauważyłeś, zadbałem niemal o każdy szczegół, a przede wszystkim o prawidłowe zasilanie, które wbrew pozorom jest bardzo ważne. Po prawej stronie schematu znajduje się nasz układ wykonawczy. Należy pamiętać, że nasz układ potrzebuje do pracy dwóch źródeł zasilania. Mikrokontroler zasilamy napięciem 5V oraz część logiczną mostka, natomiast napięciem 12V zasilamy drugą część mostka opowiedzialną za silniki (12V podłączmy do piny oznaczonego na schemacie jak X1-1 i X1-2).
Mając już złożony układ możemy zabrać się za oprogramowanie naszego mikrokontrolera, program napisałem w języku C, w środowisku programistycznym Eclipse.
#include <avr/io.h>
#include <util/delay.h>
//piny sterujące
#define WE_A PD7
#define WE_B PD4
// polecenia sterujące silnikiem
#define DC_LEWO PORTD &= ~(1<<WE_A); PORTD |= (1<<WE_B)
#define DC_PRAWO PORTD |= (1<<WE_A); PORTD &= ~(1<<WE_B)
#define DC_STOP PORTD &= ~(1<<WE_A); PORTD &= ~(1<<WE_B)
//definicje pinów diod LED
#define LED_P (1<<PC7) //dioda sygnalizująca obroty w prawo
#define LED_L (1<<PC6) //dioda sygnalizująca obroty w lewo
#define LED_S (1<<PC5) //dioda sygnalizująca zatrzymanie pracy silnika
//włączanie diod led za pomocą stanu niskiego
#define LED_P_ON PORTC &= ~ LED_P
#define LED_L_ON PORTC &= ~ LED_L
#define LED_S_ON PORTC &= ~ LED_S
//wyłącznie diód led za pomocą stanu wysokiego
#define LED_P_OFF PORTC |= LED_P
#define LED_L_OFF PORTC |= LED_L
#define LED_S_OFF PORTC |= LED_S
int main(void) {
//ustawianie kierunków portów
DDRB |= (1<<WE_A)|(1<<WE_B);
DDRC |= LED_P | LED_L | LED_S;
PORTC |= LED_P | LED_L | LED_S;
while(1) {
DC_PRAWO;
LED_P_ON;
_delay_ms(6000);
LED_P_OFF;
DC_STOP;
LED_S_ON;
_delay_ms(4000);
LED_S_OFF;
DC_LEWO;
LED_L_ON;
_delay_ms(5000);
LED_L_OFF;
DC_STOP;
LED_S_ON;
_delay_ms(4000);
LED_S_OFF;
}
}
Kod został zaopatrzony w komentarze, więc myślę że nie bedęziesz miał problemów ze zrozumieniem o co chodzi, jednakże kilka spraw wymaga wyjaśnienia: na początku tworzymy definicję pinów do którego podłączony został nasz mostek, w naszym przypadku są to piny: PD7 i PD4, następna rzeczą jest zdefiniowanie komend sterujących obrotami, a zostały ona napisane na podstawie poniższej tabeli prawdy dla układu L293D.
gdzie H oznacza stan wysoki (1), a L stan niski (0).
Zakończenie
Dziękuję za przeczytanie mojej pracy, mam nadzieję, że chociaż trochę przybliżyłem Ci temat silników elektrycznych, oraz ich sterowania za pomocą mikrokontrolera, jeżeli chodzi o silniki krokowe to mogłem o nich napisać dużo więcej, ale tego nie robiłem z uwagi na to ze tu na naszym forum sa świetne artykuły opisujące te wspaniałe silniki, chciałem tylko poruszyć ogólne zagadnienia o tych silnikach
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.





 prostą budowę silnika,
prostą budowę silnika, tętnienia momentu elektromagnetycznego,
tętnienia momentu elektromagnetycznego,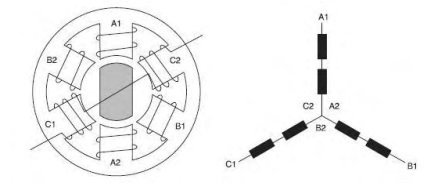




















Trwa ładowanie komentarzy...