Staram się, aby wszystkie serie były publikowane na Forbocie w momencie, gdy mam już gotowe kilka części na zapas. Z tymi artykułami będzie jednak inaczej. Mam nadzieje, że taki worklog prowadzony "na żywo" zmotywuje mnie do regularnej pracy.
Pisząc w skrócie moim celem jest zbudowanie małego robota wyposażonego w różne ciekawe podzespoły. Całość ma być wyłącznie projektem edukacyjnym, bez konkretnego celu. Pojazd ma być w stanie swobodnie poruszania się po biurku.
Trochę wspomnień...
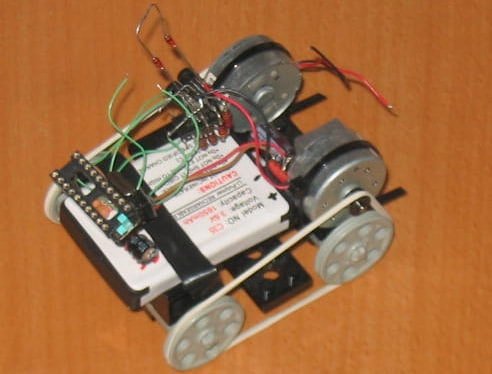
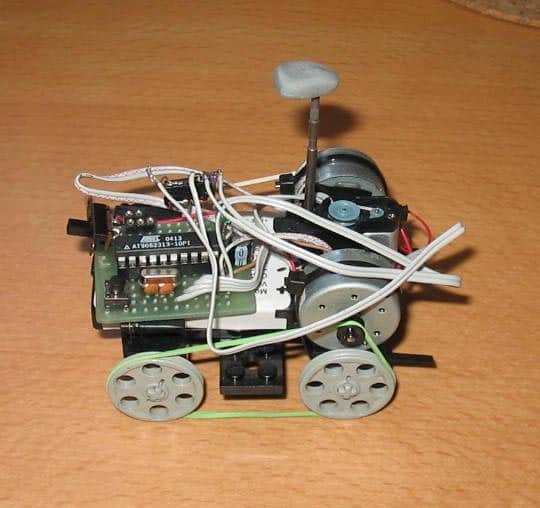
Wszystko działo się dawno, dawno temu, gdy nie było w Internecie tak dużej ilości artykułów o robotyce - były to straszne czasy bez Forbota! Zainteresowałem się wtedy projektem opisywanym na Elektrodzie. Chodziło o bardzo niepozornego, małego Milibota, była to wtedy popularna nazwa na konstrukcje, jak poniższa.
Autor robota, użytkownik: Coyote~ na Elektroda.pl, źródła zdjęć: http://www.xworld.republika.pl
Była to konstrukcja niepozorna. Składała się z dwóch silników od CD, zasilania z baterii od Nokii 3310 oraz elektroniki lutowanej "na pająka". Pamiętam jednak, że obserwowanie tamtego tematu było dla mnie bardzo dużą inspiracją. Był to rok 2005, nie miałem dużego doświadczenia z elektroniką. Ostatecznie projekt porzuciłem.
Ostatnio trafiłem jednak na zdjęcia tego robota w moim archiwum. Postanowiłem wznowić projekt. Korzystając ze zdobytej wiedzy oraz poznanych technologii stworzyć dopracowaną konstrukcje, która sprawi mi dużo frajdy. Będę mógł wtedy sobie powiedzieć:
"Tak, nauczyłeś się całkiem sporo przez ostatnie 10 lat!"
Powoli "przygaszam" moją aktywność na zawodach robotów, w tym roku będę startował już tylko w wybranych konkursach. W związku z tym pora zbudować coś wyłącznie dla własnej satysfakcji. Bez regulaminów i obostrzeń, co do budowanej konstrukcji!
Założenia projektowe
Konstrukcję mechaniczną chce oprzeć w całości o wydruki 3D. Prawdopodobnie wykorzystam PLA oraz materiały elastyczne. Pojazd będzie poruszał się na gąsienicach. Robot będzie sterowany przez mikrokontroler z rodziny STM32. Na pokładzie oprócz sterownika silników obowiązkowo znajdzie się odbiornik podczerwieni oraz moduł Bluetooth. W planach mam również zamontowanie żyroskopu, czujników przeszkód, czujników linii oraz światła.
Co jeszcze pojawi się w robocie?
Czekam na Wasze propozycje. Jakie czujniki warto tam umieścić? Jakie ciekawe dodatki? Rozważę wszystkie pomysły jakie przedstawicie w komentarzach. Jedyne, co mnie ogranicza to wymiary. Chcę aby robot mieścił się na małej kartce samoprzylepnej 7x7cm.
Na ten moment do omówienia pozostawiam:
Silniki napędowe
Zastosowane czujniki
Dodatki typu dodatkowy silnik/serwo robiący "coś" - sam jestem ciekawy, co z tego wyjdzie
Widzieliście gdzieś podobne ciekawe projekty?
Zanim usiądę do projektowania mechaniki w Inventorze lub elektroniki w EAGLE chce zrobić małe "badania rynku". Jeśli znacie podobne projekty opisane gdzieś w Internecie lub macie zdjęcia ciekawych konstrukcji, pokażcie je w komentarzach! Szczególnie zależy mi na projektach małych, wielozadaniowych robotów.
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.






















Trwa ładowanie komentarzy...