Napęd wykorzystujący kołanie występuje raczej w naturze, dlatego roboty zainspirowane żywymi organizmami również z niego nie korzystają.
Wynalazcy z Uniwersytetu Rutgersa zrobili jednak wyjątek. Ich dzieło to całkowicie miękki, silikonowy pojazd na czterech kołach, poruszający się przy pomocy pneumatycznych mięśni.
Pneumatyczne mięśnie robotów przypominają mięśnie szkieletowe. Wykonują one pojedyncze ukierunkowane ruchy, zazwyczaj w parze, w której drugi mięsień wywiera siłę w przeciwnym kierunku. W tym przypadku inspiracją był jednak inny rodzaj aktywności – perystaltyka.
Tak jak zsynchronizowane skurcze i rozkurcze mięśni tworzą przesuwającą się falę, silniki robota obracają się w sposób ciągły. Pneumatyczne elementy uruchamiające się po kolei wypełniane są powietrzem, które następnie wypuszczają.
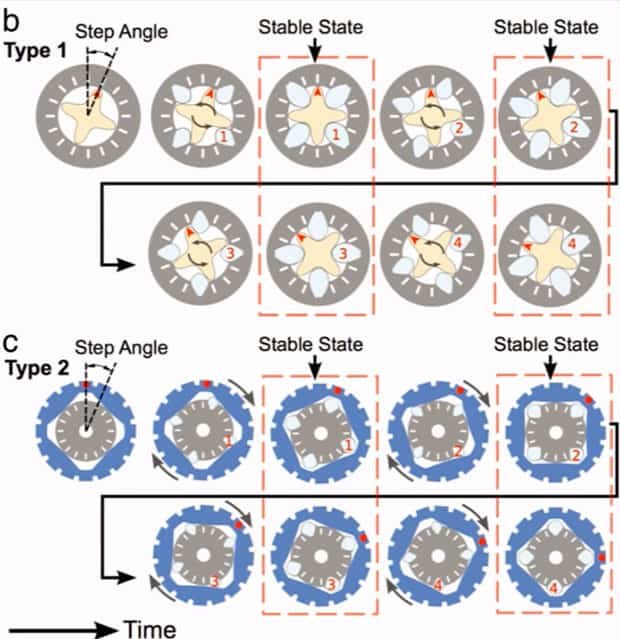
Konstrukcja składa się z dwóch części – ruchomego wirnika i nieruchomego stojana. Wirnik posiada żłobienia, do których pasują napompowane komory pneumatyczne stojana. Komory te są podzielone na cztery grupy, które wypełniają się powietrzem jedna po drugiej.
Typ 1: Wewnętrzny wirnik i zewnętrzny stojan. Typ 2: Wewnętrzny stojan i zewnętrzny wirnik.
Robot nie posiada ani jednego sztywnego elementu. Upadek z 80 cm jest dla niego całkowicie bezpieczny. Jest on także świetnie przystosowany do jazdy pod wodą i po nierównym terenie.
Większość części została wydrukowana w 3D, więc urządzenie jest stosunkowo niedrogie. Jego miękkość i elastyczność oznacza nie tylko łatwość przeciskania się przez otwory, ale także bezpieczeństwo w kontakcie z dziećmi. czy zwierzętami. Niska wrażliwość na działanie pola magnetycznego pozwoliłaby natomiast na pracę w przestrzeni kosmicznej. Niestety, przynajmniej na razie, robot musi być podłączony do zewnętrznego źródła sprężonego powietrza.
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.























Trwa ładowanie komentarzy...