Ewolucja wyposażyła nas w palce, które cały czas są niedoścignionym wzorem dla wielu systemów chwytania i manipulowania przedmiotami.
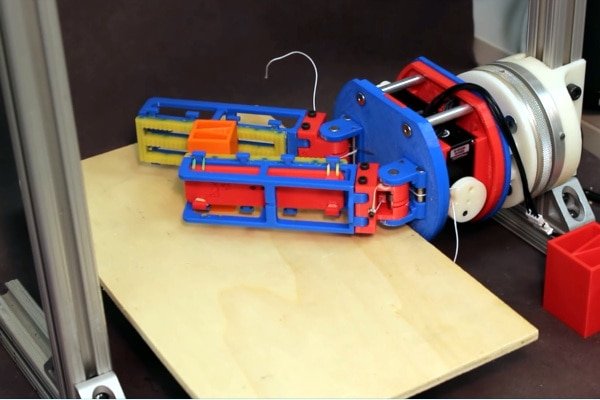
Naukowy z Yale wykorzystali popularny druk 3D, poliuretan oraz serwomechanizmy do budowy prostego manipulatora, który może precyzyjnie manipulować małymi obiektami.
Część wynalazców próbuje mniej lub bardziej udolnie skopiować mechanizm działania ludzkich palców, a część postanawia iść na skróty. Tak też było z badaczami z Yale, którzy wymyślili sprytny sposób na kontrolę przesuwania i obracania obiektów między dwoma palcami.
Palec wydrukowany w 3D składa się z dwóch części. Pierwsza z nich to "goły" wydruk, który jest stosunkowo śliski. Druga część została pokryta poliuretanem, który zapewnia mocniejszy "chwyt".
Małe gumki recepturki, wypychają gładką powierzchnię palca z pomiędzy poliuretanowej powierzchni o dużym współczynniku tarcia. Jeśli ściskamy przedmiot lekko, to dotyka on jedynie tej gładkiej powierzchni. Jeśli natomiast obiekt ściśniemy mocniej, to zaczyna on dotykać powierzchni przyczepnej. Dzięki temu lekki ścisk pozwala na przesuwanie się przedmiotu (ślizganie po palcu), a mocniejszy ścisk daje pełną kontrolę nad jego pozycją i rotacją.
Działanie układu zostało bardzo dobrze wyjaśnione na poniższym wideo:
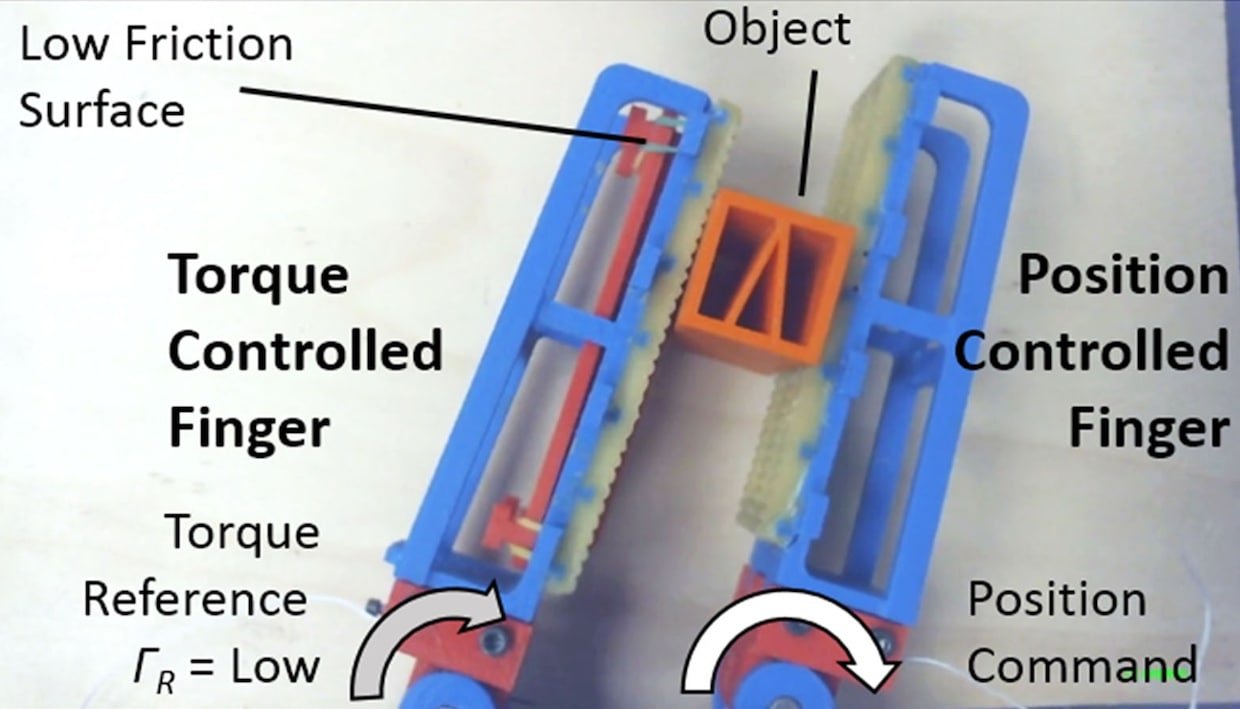
Łącząc dwa palce (w tym jeden tylko z gładką powierzchnią) możemy swobodnie manipulować nawet małymi obiektami. Palcem z chowaną, gładką powierzchnią sterujemy kontrolując moment (pośrednio jest to siła, z jaką palec naciska na obiekt), a palcem z samą powierzchnią poliuretanową sterujemy zadając mu określoną pozycję. Mając przedmiot między palcami możemy go przesuwać lub „rolować”.
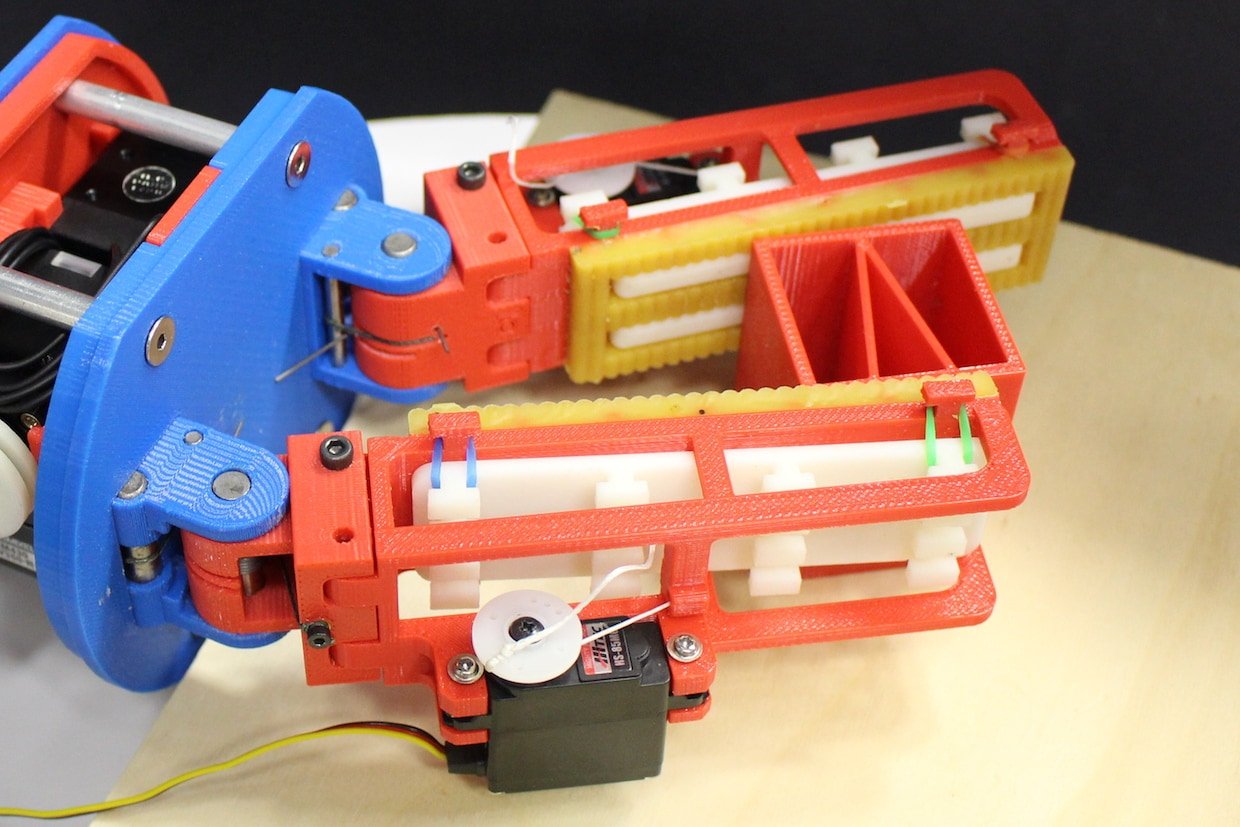
Konstruktorzy z czasem postanowili rozbudować palce i dodali do nich serwomechanizmy, dzięki którym możliwe jest elektroniczne chowanie gładkiej powierzchni. Takie rozwiązanie pozwoliło na jeszcze dokładniejsze manewrowanie obiektami.
Nowa wersja chwytaka z elektronicznie chowanymi elementami gładkimi.
Obecnie trwają prace nad rozwijaniem algorytmu sterowania, bo dotychczasowe rozwiązanie działa bez sprzężenia zwrotnego, w pętli otwartej – operator nie ma pełnej kontroli nad trzymanym obiektem.
Istnieje duża szansa, że pomysł uda się zaadaptować jako rozwiązanie problemu chwytania przedmiotów przez cybernetyczne protezy dłoni. Na koniec warto zwrócić uwagę, że elementy użyte w tym projekcie (głównie druk 3D i serwomechanizmy) są dostępne praktycznie dla każdego hobbysty. Nic nie stoi na przeszkodzie, aby wykonywać podobne eksperymenty we własnym warsztacie!
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.





















Trwa ładowanie komentarzy...