Kursy • Poradniki • Inspirujące DIY • Forum





Serwomechanizm - co to jest? Co warto wiedzieć?
Serwomechanizm modelarski (serwo) to silnik prądu stałego z przekładnią oraz specjalnym układem sterowania, zamknięty w jednej obudowie. Serwa modelarskie charakteryzują stosunkowo niewielkie wymiary, trójprzewodowe podłączenie (dwa przewody zasilające i jeden przewód sterujący), specjalny sposób sterowania oraz zestaw tzw. orczyków....
Robot artysta pod kontrolą Arduino UNO

Możliwości robotów działających pod kontrolą Arduino nie mają granic. Tym razem prostemu robotowi postanowiono wszczepić duszę artysty.
Robot malarz z gracją porusza się samodzielnie po płaskiej powierzchni i w tym czasie, za pomocą pędzla, tworzy kolorowe obrazy.
Zbuduj swój automat do sprzedaży sterowany przez Arduino

Automaty do sprzedaży możemy dzisiaj znaleźć prawie wszędzie. Jeśli kiedykolwiek myśleliście o samodzielnej budowie takiego urządzenia, to ten projekt jest właśnie dla Was.
Autor dość szczegółowo opisuje swoje przygody z budową własnej wersji projektu Venduino.
Precyzyjne palce robota wydrukowane w 3D

Ewolucja wyposażyła nas w palce, które cały czas są niedoścignionym wzorem dla wielu systemów chwytania i manipulowania przedmiotami.
Naukowy z Yale wykorzystali popularny druk 3D, poliuretan oraz serwomechanizmy do budowy prostego manipulatora, który może precyzyjnie manipulować małymi obiektami.
Kurs budowy robotów – #9 – ekspander I/O, serwo
Zbliżamy się do końca kursu budowy robotów, pora omówić więc pozostałe możliwości naszego shieldu, które będą przydatne podczas dalszego rozbudowywania robotów!
Zajmiemy się ekspanderem pinów oraz złączem dla serwomechanizmu modelarskiego.
Kurs elektroniki II – #9 – czujnik przeszkód, sterownik serwa

W poprzedniej części kursu omówiliśmy zasadę działania małego, ale niezwykle ważnego i często spotykanego układu czasowego – NE555.
Teraz pora na ćwiczenia praktyczne. Zajmiemy się budową sterownika serw modelarskich i czujnika odległości (przyda się więc wiedza o IR i PWM).
Kurs Arduino – #5 – PWM, serwomechanizmy, biblioteki

Poprzednia część omawiała przetwornik ADC. Tym razem pójdziemy w drugą stronę i zajmiemy się generowanie specyficznego sygnału.
Mowa o PWM - modulacji szerokości impulsu. Zagadnienie to może brzmieć skomplikowanie, jednak kilka praktycznych przykładów na pewno rozwieje wszelkie wątpliwości!
Roboty kroczące – konstrukcja mechaniczna
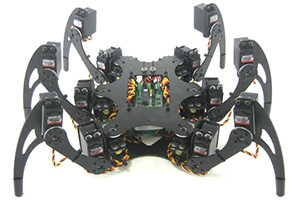
Roboty kroczące zyskują ostatnio coraz większą popularność. Z konstrukcji budowanych tylko w ośrodkach badawczych stały się urządzeniami komercyjnymi oraz budowanymi amatorsko.
W artykule omówione zostały podstawy, związane z konstrukcją mechaniczną robotów kroczących.






Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.




