Osoby, które chodziły kiedyś po górach (zwłaszcza z ciężkim plecakiem) wiedzą, że czasem dobrze jest się wesprzeć na kijkach trekingowych lub kiju znalezionym w lesie.
Ułatwia to balansowanie w trudnym terenie, pomaga utrzymać równowagę i odciąża trochę od dźwigania plecaka. My to wiemy, ale roboty jeszcze do niedawna nie miały o tym pojęcia!
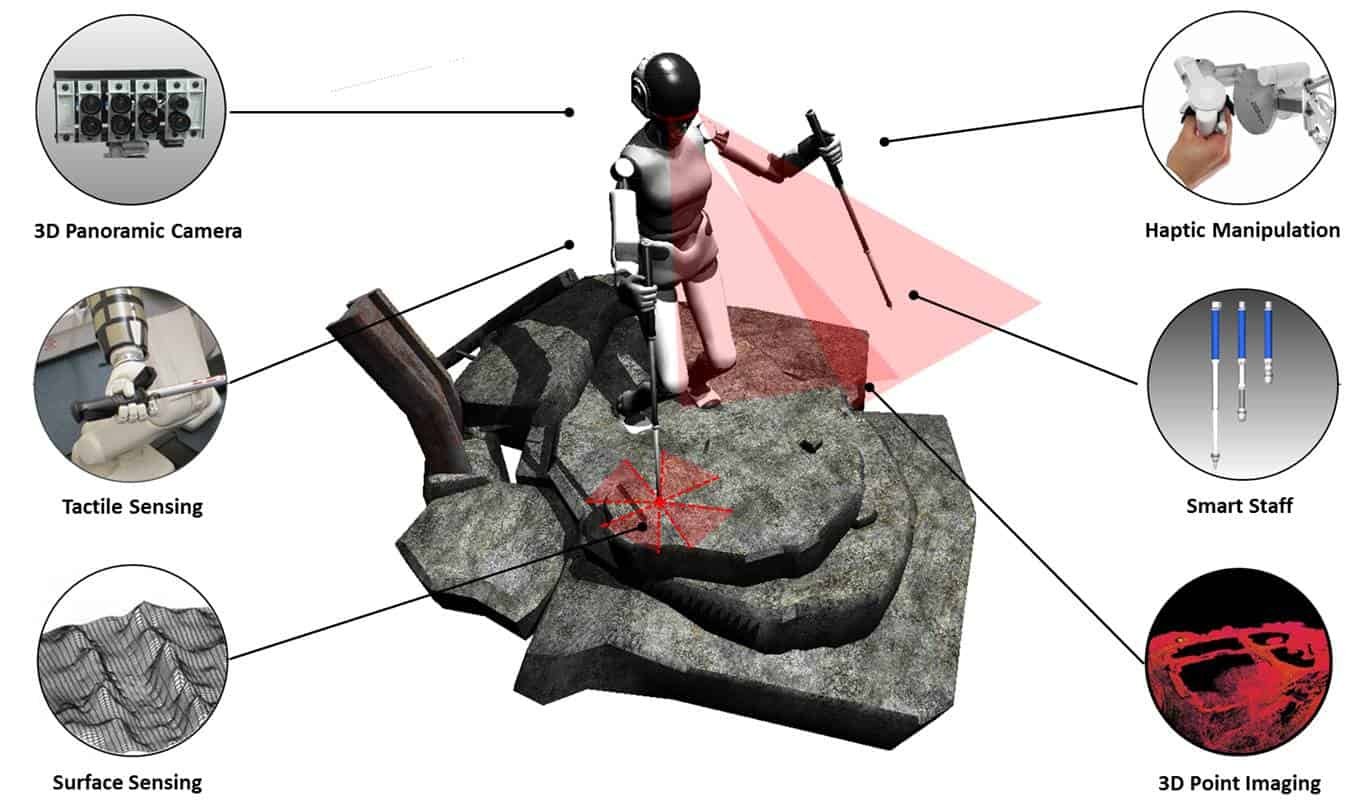
Podczas letniej konferencji ICRA (IEEE International Conference on Robotics and Automation) grupa z Laboratorium Sztucznej Inteligencji na Uniwersytecie Stanford zaprezentowała projekt nietypowych kijków trekingowych. Stworzono je nie dla ludzi, ale robotów humanoidalnych. I nie jest to zwykły kawałek drewna czy innego materiału, którym robot ma się tylko podpierać. Całe rozwiązanie (robot + kijki) nosi nazwę SupraPed.
SupraPed i jego najważniejsze funkcjonalności
Kijki są wyposażone w czujniki dotyku, które pozwalają na lepsze rozpoznanie terenu. Dodatkowo mają w sobie trójwymiarowy system wizyjny, który pozwala mapować okolicę. Jednak wraz z dwoma dodatkowymi punktami podparcia pojawiło się wiele innych problemów, jak chociażby zmieniający się środek ciężkości. Dlatego włożono ogromną ilość pracy w opracowanie nowych modeli matematycznych i równań, które pozwalają symulować chód robota.
Symulacje SupraPed. Rezultaty ze świata rzeczywistego nie są jeszcze dostępne
Celem tego projektu jest zbudowanie robota, który poradzi sobie w trakcie akcji ratunkowych w trudnych warunkach, np. po trzęsieniu ziemi. Naukowcy narzekają, że roboty czworonożne, jak np. Big Dog, nie nadają się do takich akcji mimo większej stabilności. Głównie ze względu na to, że nie mogą używać „rąk”. Jak jednak SupraPed różni się od nich pod tym względem?
Praca nad kijkami wre. Konferencja ICRA odbyła się w wakacje, a grupa naukowców już pracuje nad pierwszym prototypem. Do tej pory przeprowadzili serię symulacji, zgodnie z którymi ich robot prawie nigdy nie upada. Myślicie, że fizyczny model sprawdzi się tak dobrze, jak wirtualny?
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.





















Trwa ładowanie komentarzy...