
Polecane
Ciekawe i popularne projekty zbudowane przez użytkowników FORBOT-a.

Radio Dominik przerobione na radio cyfrowe oparte na esp32
Igus napisał temat w Projekty - DIY,
-
-
- 8 odpowiedzi


Wybrane przez
Optymistka,
CNC - edycja biedny student (worklog)
michalotto napisał temat w Projekty - DIY w budowie (worklogi),
-
- 38 odpowiedzi
Wybrane przez
Optymistka,
NEON - Robot typu Combat klasy Antweight
StrongVoltage napisał temat w Projekty - DIY roboty,
- 1 odpowiedź
Wybrane przez
Optymistka,
Komputer retro mikroprocesorze Motoroli MC6802
atlantis86 napisał temat w Projekty - DIY,
- 3 odpowiedzi
Wybrane przez
Optymistka,
Czym jest pneumatyka? Symulacja pneumatyki w FluidSIM
mcsw_02 napisał temat w Artykuły użytkowników,
- 0 odpowiedzi
Wybrane przez
Optymistka,.jpg.7b2610f75a2179482b73f0251a9dc312.jpg)
Komputer retro na Z80, pod CP/M 2.2
atlantis86 napisał temat w Projekty - DIY,
-
-
- 4 odpowiedzi
Wybrane przez
Optymistka,
Komputer retro na kultowym procesorze MOS6502
atlantis86 napisał temat w Projekty - DIY,
- 3 odpowiedzi
Wybrane przez
Optymistka,
Uniwersalny sterownik robotów
StrongVoltage napisał temat w Projekty - DIY,
-
- 4 odpowiedzi
Wybrane przez
Optymistka,
Wytrawiarka do hobbystycznej produkcji płytek drukowanych
StrongVoltage napisał temat w Projekty - DIY,
-
-
- 5 odpowiedzi
Wybrane przez
Optymistka,
Uniwersalny sterownik do Braccio
wld182 napisał temat w Projekty - DIY roboty,
-
- 5 odpowiedzi
Wybrane przez
Optymistka,
Asystent do lutowania - ramię robotyczne DIY ze sterowaniem nożnym
Lukasc napisał temat w Projekty - DIY,
-
- 4 odpowiedzi
Wybrane przez
Optymistka,
Inteligentna skrzynka na listy – wygoda i nowoczesność w jednym
huku napisał temat w Projekty - DIY,
-
- 13 odpowiedzi
Wybrane przez
Optymistka,
Małe mieszadełko magnetyczne DIY
MikLuk napisał temat w Projekty - DIY,
-
- 4 odpowiedzi
Wybrane przez
Optymistka,
Komputer retro na CPU 8085, pod system CP/M 2.2
atlantis86 napisał temat w Projekty - DIY,
- 3 odpowiedzi
Wybrane przez
Optymistka,.jpg.5a0b3aecb22f2e81a09cbd4ab073409a.jpg)
Weekendowy projekt, czyli kalkulator RAD 74007
atlantis86 napisał temat w Projekty - DIY,
- 0 odpowiedzi
Wybrane przez
Optymistka,
Uniwersalna płytka z układem 8048
atlantis86 napisał temat w Projekty - DIY,
- 2 odpowiedzi
Wybrane przez
Optymistka,
Radio internetowe (i nie tylko) na PIC32
atlantis86 napisał temat w Projekty - DIY,
- 1 odpowiedź
Wybrane przez
Optymistka,
Rozbudowa komputera POLON7880
atlantis86 napisał temat w Projekty - DIY,
- 3 odpowiedzi
Wybrane przez
Optymistka,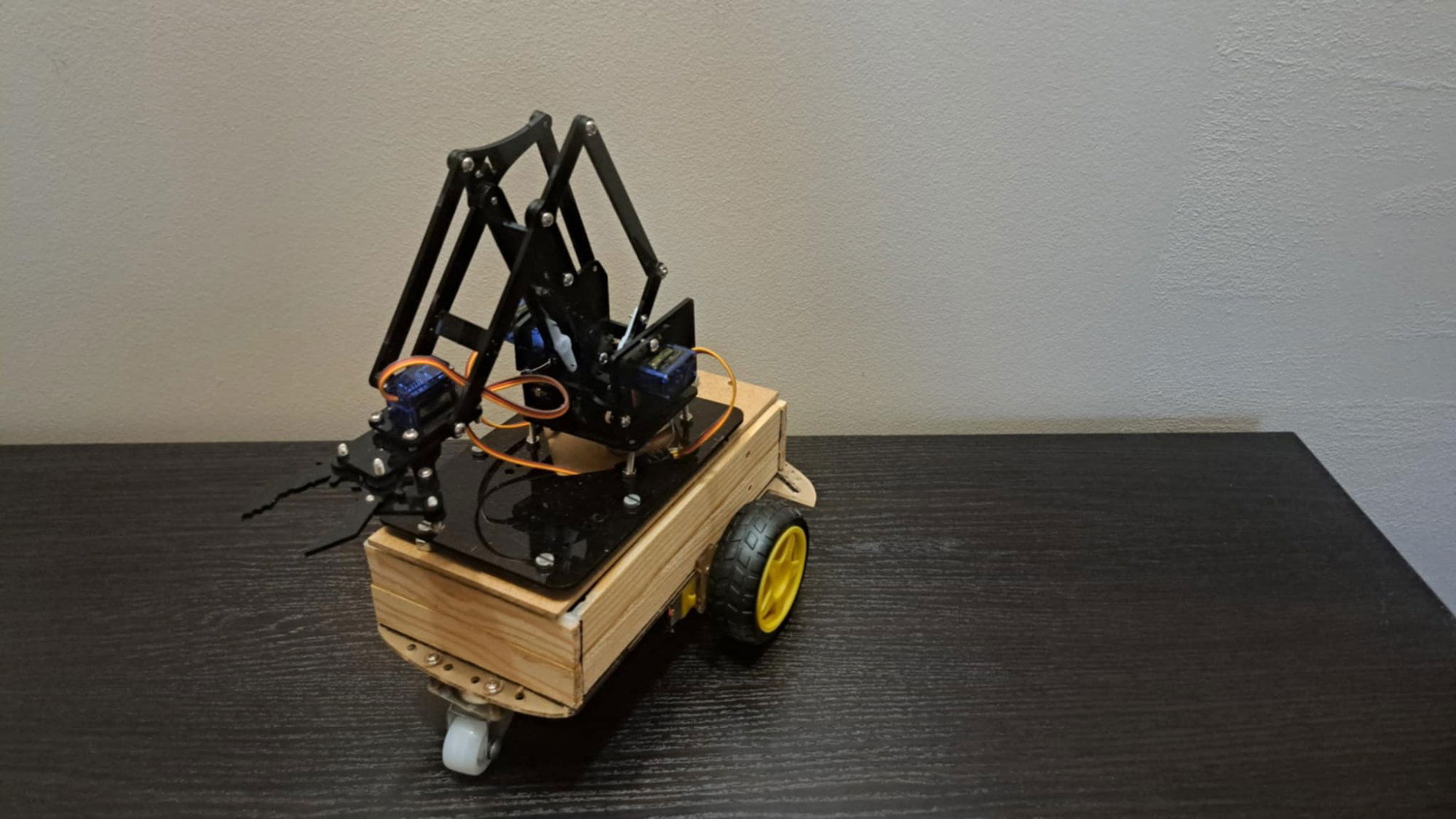
Mobilny robot z 4-osiowym ramieniem
PiotrSz03 napisał temat w Projekty - DIY roboty,
- 0 odpowiedzi
Wybrane przez
Optymistka,
Prosty pilot oparty na module radiowym nrf24L01
StrongVoltage napisał temat w Projekty - DIY,
-
- 5 odpowiedzi
Wybrane przez
Optymistka,
Bell Labs – organizacja, która wynalazła „przyszłość”
rafal2808 napisał temat w Artykuły użytkowników,
- 3 odpowiedzi

Wybrane przez
Treker,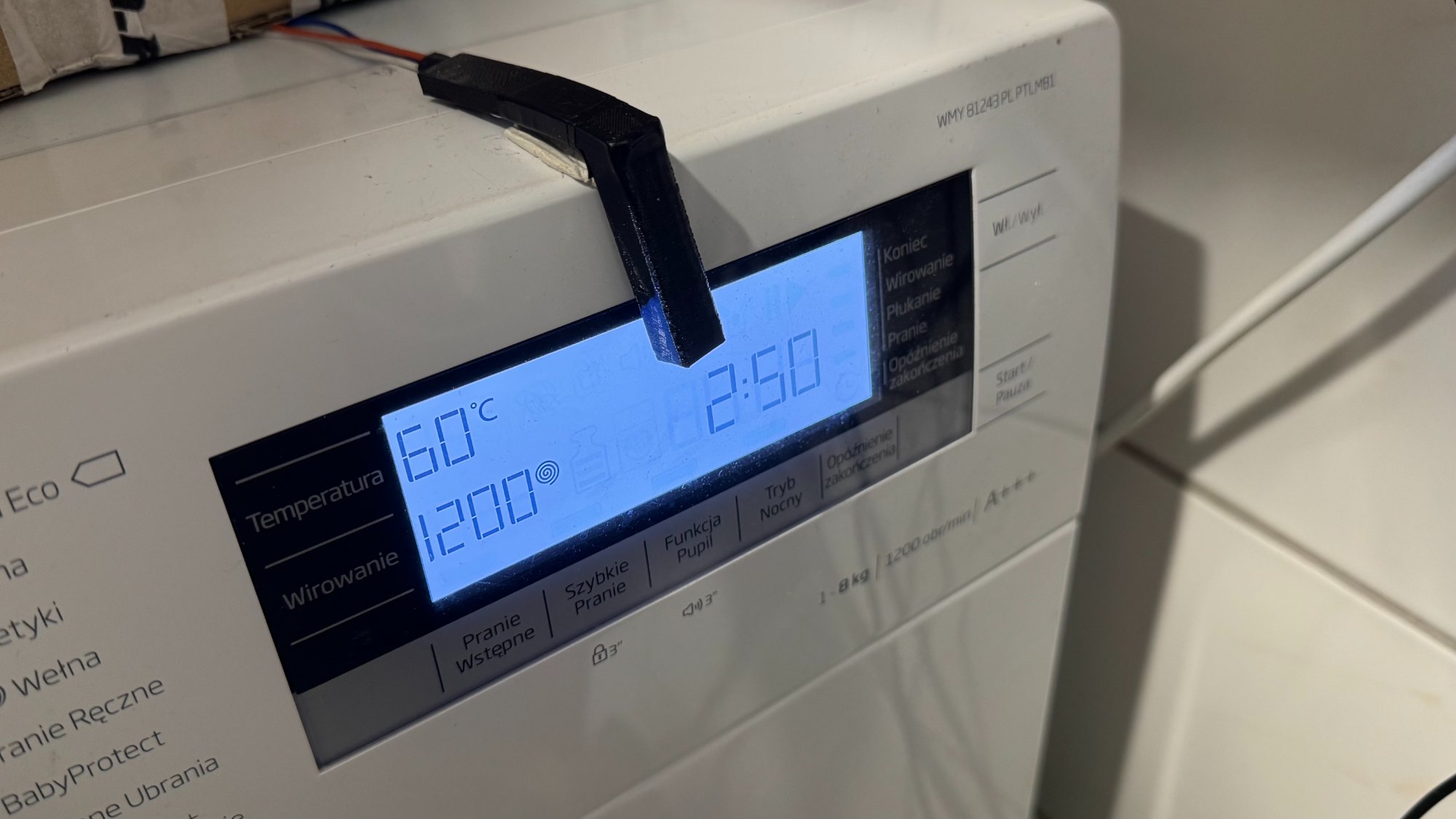
Pakiet „smart” z czujnikiem zalania do pralki
Lukasc napisał temat w Projekty - DIY,
-
-
- 5 odpowiedzi
Wybrane przez
Optymistka,
Kolejny rekwizyt - patefon Pana Niedźwiedzia
ethanak napisał temat w Projekty - DIY,
- 1 odpowiedź
Wybrane przez
Optymistka,
Pojazd zdalnie sterowany z kamerą na ESP32
patryk_99 napisał temat w Projekty - DIY roboty,
-
- 9 odpowiedzi
Wybrane przez
Optymistka,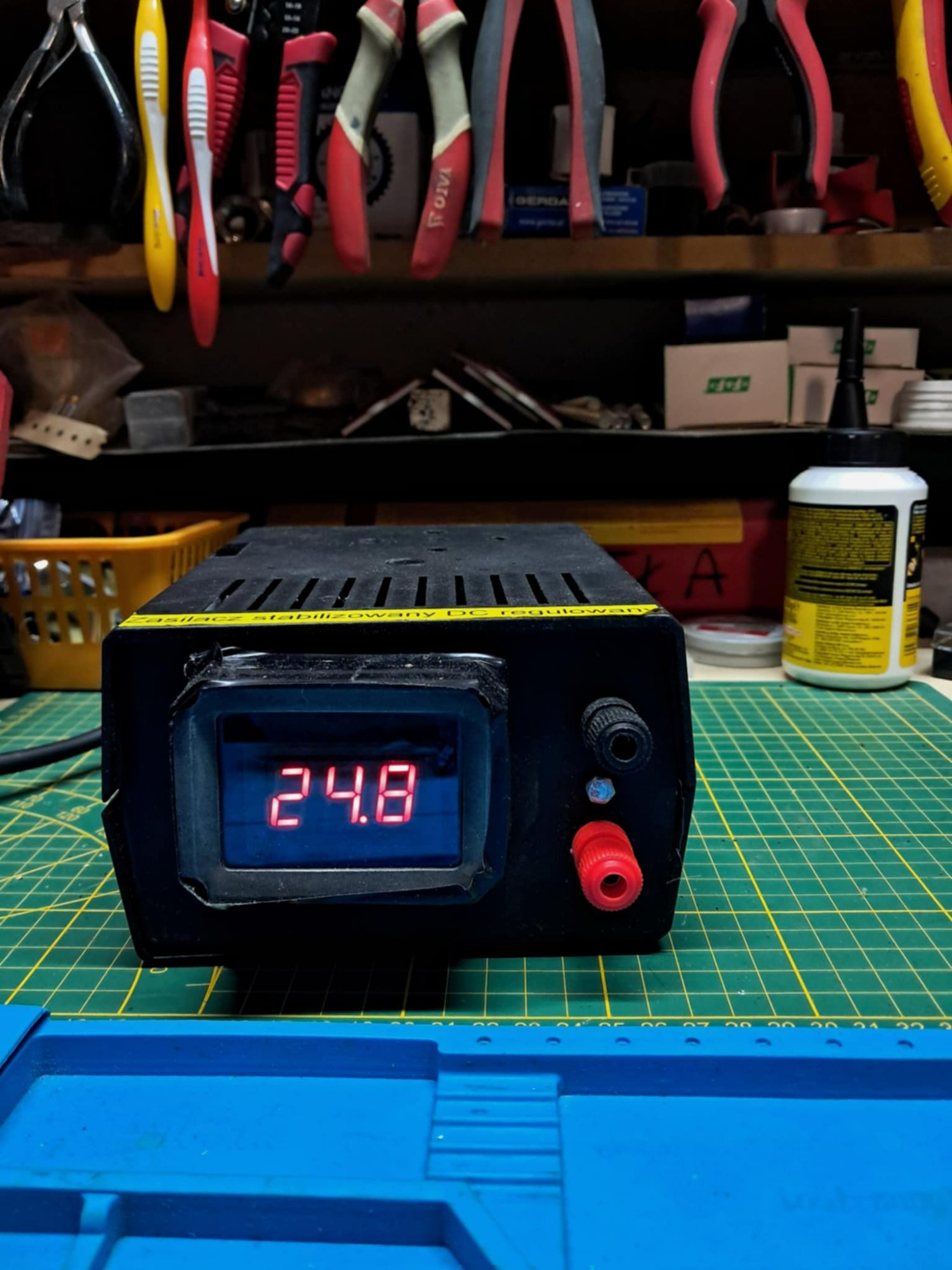
Zasilacz regulowany (stabilizowany) 25V/4A
chickyfloopy2 napisał temat w Projekty - DIY,
(Zmienny-stały) 24.8V/4A, prąd płynący z przetwornicy AC/DC płynie do przetwornicy step-down gdzie można dowolnie go regulować przy użyciu potencjometru na zewnątrz obudowy.
-
-
- 8 odpowiedzi
