
Polecane
Ciekawe i popularne projekty zbudowane przez użytkowników FORBOT-a.

Zabezpieczenie akumulatora 3,7V Li-Pol - hardware & software
Andrzej_DIY napisał temat w Projekty - DIY,
- 1 odpowiedź

Wybrane przez
Treker,
Regał na kwiaty z podświetleniem
TPReal napisał temat w Projekty - DIY,
- 1 odpowiedź
Wybrane przez
Treker,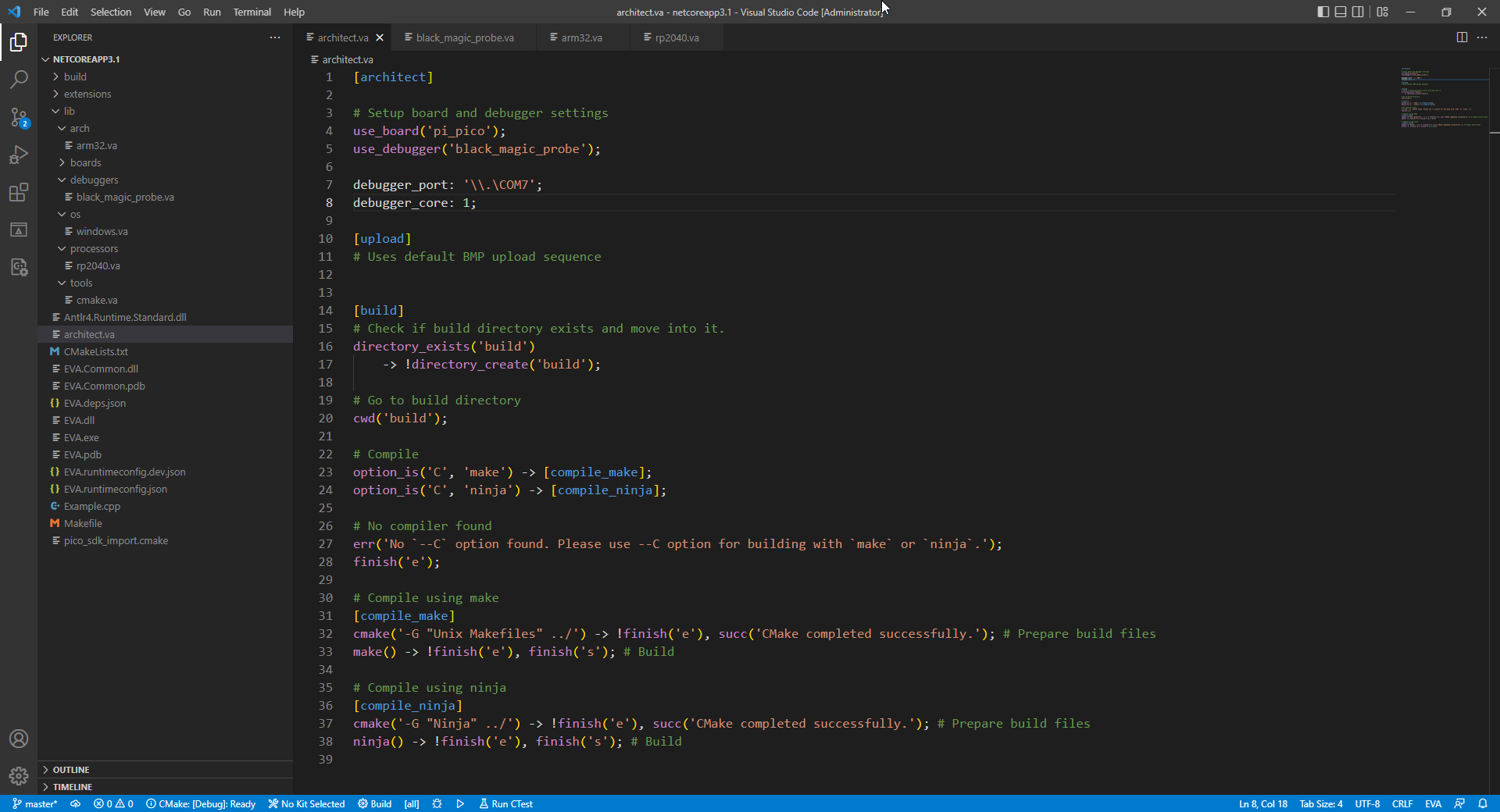
EVA (Extensible Versatile Architect)
H1M4W4R1 napisał temat w Projekty - DIY w budowie (worklogi),
-
-
- 11 odpowiedzi

Wybrane przez
Treker,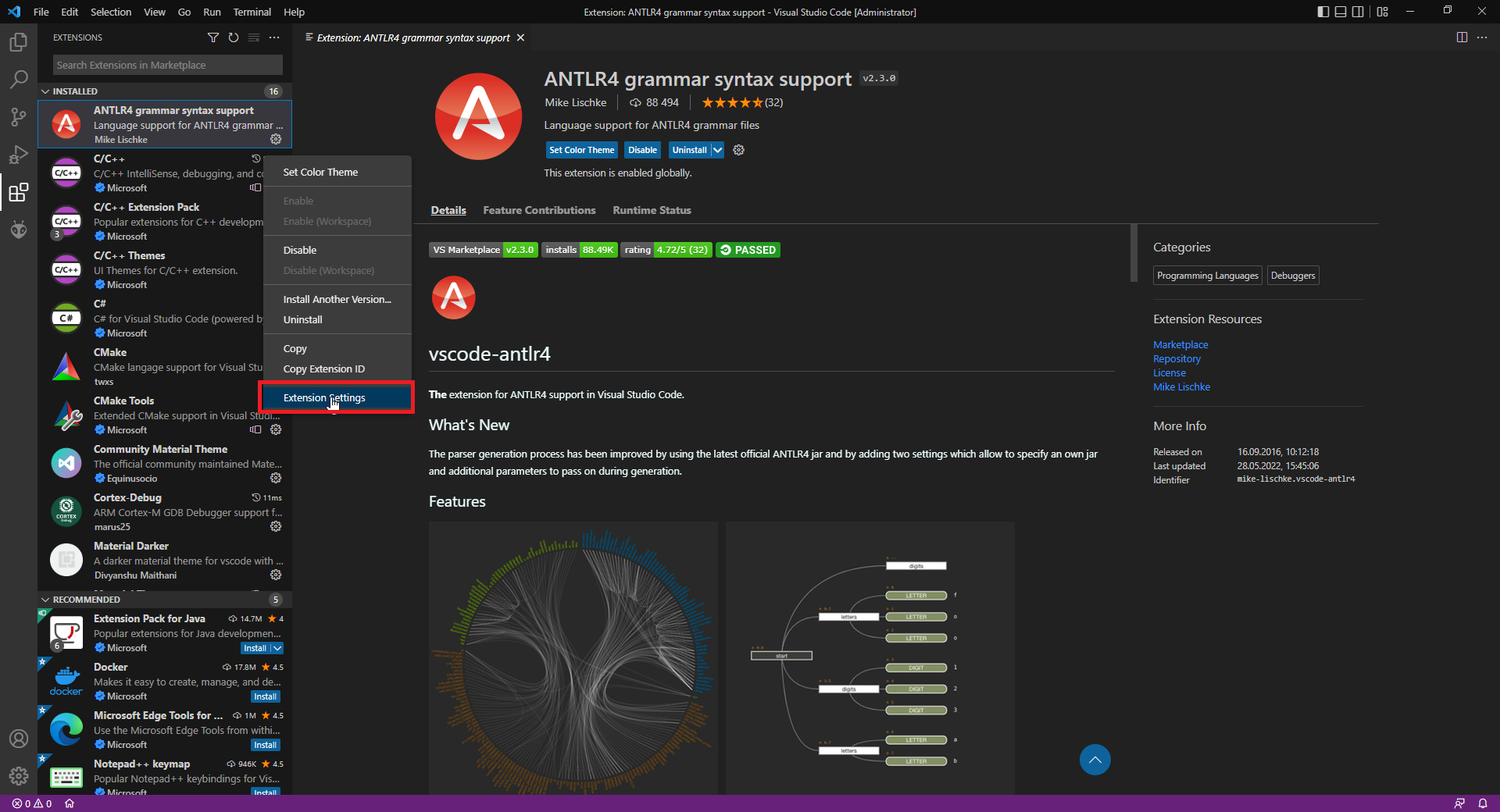
ANTLR4 - Tutaj zaczyna się język programowania
H1M4W4R1 napisał temat w Artykuły użytkowników,
- 1 odpowiedź
Wybrane przez
Treker,
iNap Malinka, nadajnik radiowy na bazie RetroPie!
Leoneq napisał temat w Projekty - DIY,
-
-
- 23 odpowiedzi
Wybrane przez
Treker,
Księżniczka i Krasnolud
ethanak napisał temat w Projekty - DIY roboty,
- 5 odpowiedzi
Wybrane przez
Treker,
Post w Sipeed Tang Nano 4k z ADC - Gowin FPGA Designer
Gieneq napisał post w temacie,
Wybrane przez
Treker,![[STM32] Dalmierz wielofunkcyjny z kolorowym wyświetlaczem](https://cdn.forbot.pl/forum/uploads/monthly_2022_08/IMG_20220813_233137_3.jpg.a68d609c1476435d9f76fff12c84ca3a.jpg)
[STM32] Dalmierz wielofunkcyjny z kolorowym wyświetlaczem
Wloczykij555 napisał temat w Projekty - DIY,
- 5 odpowiedzi
Wybrane przez
Treker,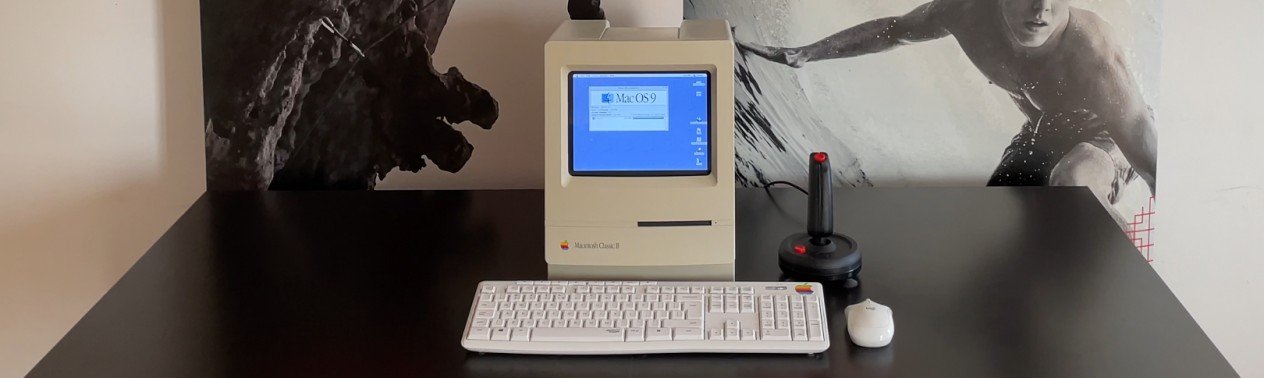
MacintoshPi - Mac OS 7, 8 i 9 oraz Commodore dla Raspberry Pi
jaromaz napisał temat w Projekty - DIY,
- 6 odpowiedzi
Wybrane przez
Treker,
MAB Robotics i robot kroczący Honey Badger
MAB_Robotics napisał temat w Projekty - DIY roboty,
- 7 odpowiedzi
Wybrane przez
Treker,
Wirówka laboratoryjna aka. ośmiornica
H1M4W4R1 napisał temat w Projekty - DIY,
-
- 10 odpowiedzi
Wybrane przez
Treker,
Pompa perystaltyczna
H1M4W4R1 napisał temat w Projekty - DIY (mini),
- 4 odpowiedzi
Wybrane przez
Treker,
LEDnode - zegarek w steampunkowym stylu
bart921 napisał temat w Projekty - DIY,
-
- 14 odpowiedzi
Wybrane przez
Treker,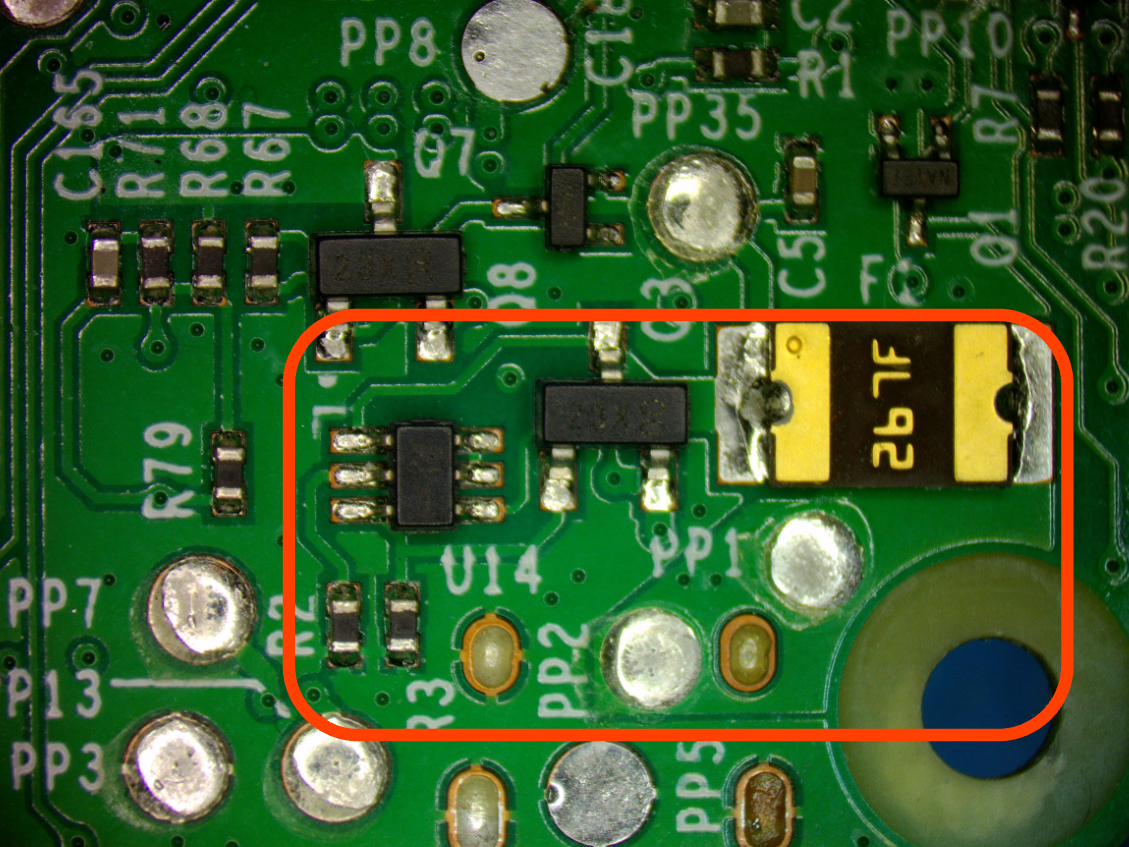
Deep Dive - analiza sprzętowa RaspberryPi 3B
Okiem_El napisał temat w Artykuły użytkowników,
- 2 odpowiedzi
Wybrane przez
Treker,
Kierownica do PC wersja 3
Krzysiek97 napisał temat w Projekty - DIY,
-
- 24 odpowiedzi
Wybrane przez
Treker,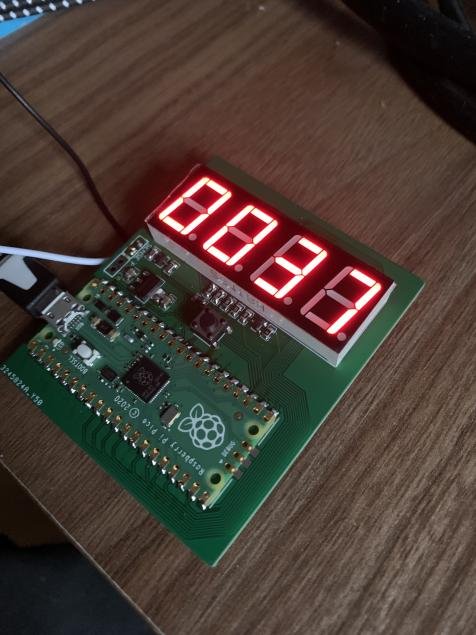
Licznik do owijarki bel
H1M4W4R1 napisał temat w Projekty - DIY,
-
- 58 odpowiedzi
Wybrane przez
Treker,
ESP na bateriach - wykorzystanie esp now
_LM_ napisał temat w Projekty - DIY,
- 3 odpowiedzi
Wybrane przez
Treker,
ESPoBOT czyli robot mobilny RC z chwytakiem i kamerą FPV
marcinus napisał temat w Projekty - DIY roboty,
-
- 23 odpowiedzi
Wybrane przez
Treker,
MWuinoUNO-Bootloader programmer i Arduino w jednym! - wersja finalna
Matthias napisał temat w Projekty - DIY,
- 0 odpowiedzi
Wybrane przez
Treker,
Gadająca poziomica z dalmierzem
ethanak napisał temat w Projekty - DIY,
-
- 30 odpowiedzi
Wybrane przez
Treker,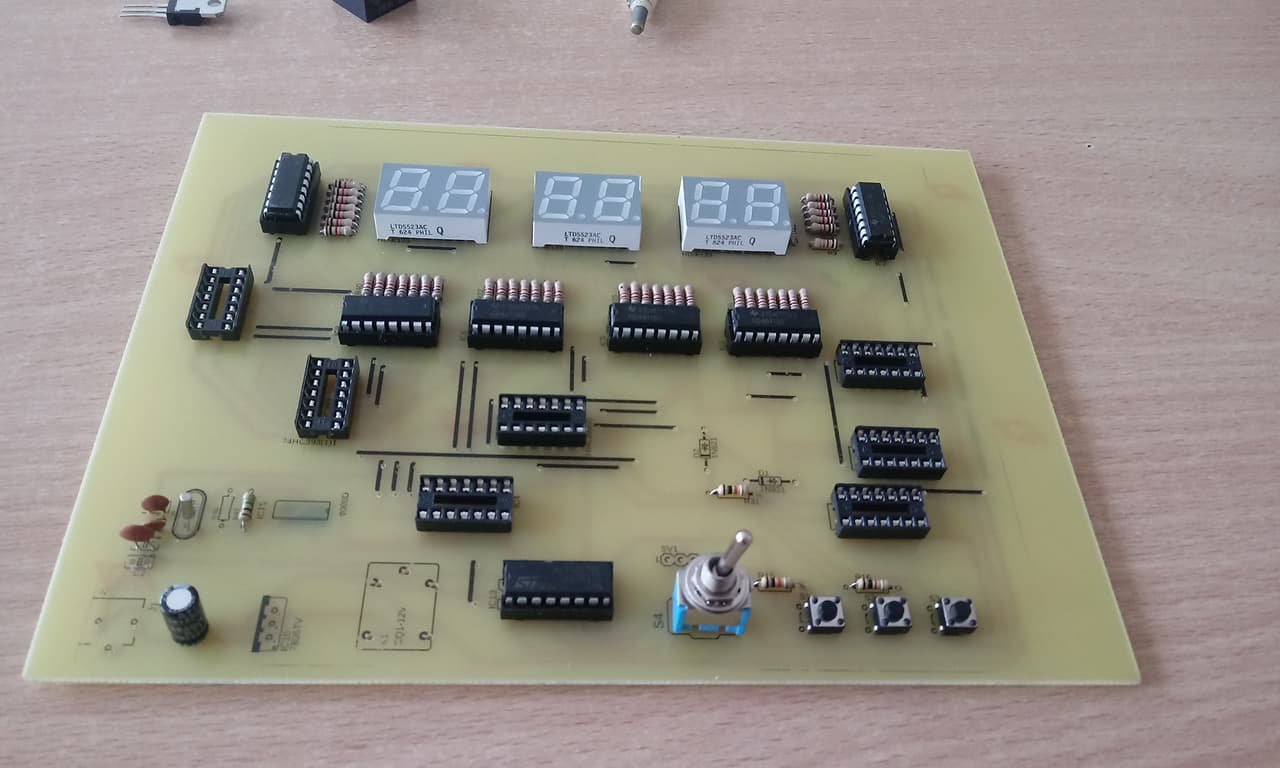
Prototyp zegara opartego na licznikach 74HC393
Zimol napisał temat w Projekty - DIY (początkujący),
- 6 odpowiedzi
Wybrane przez
Treker,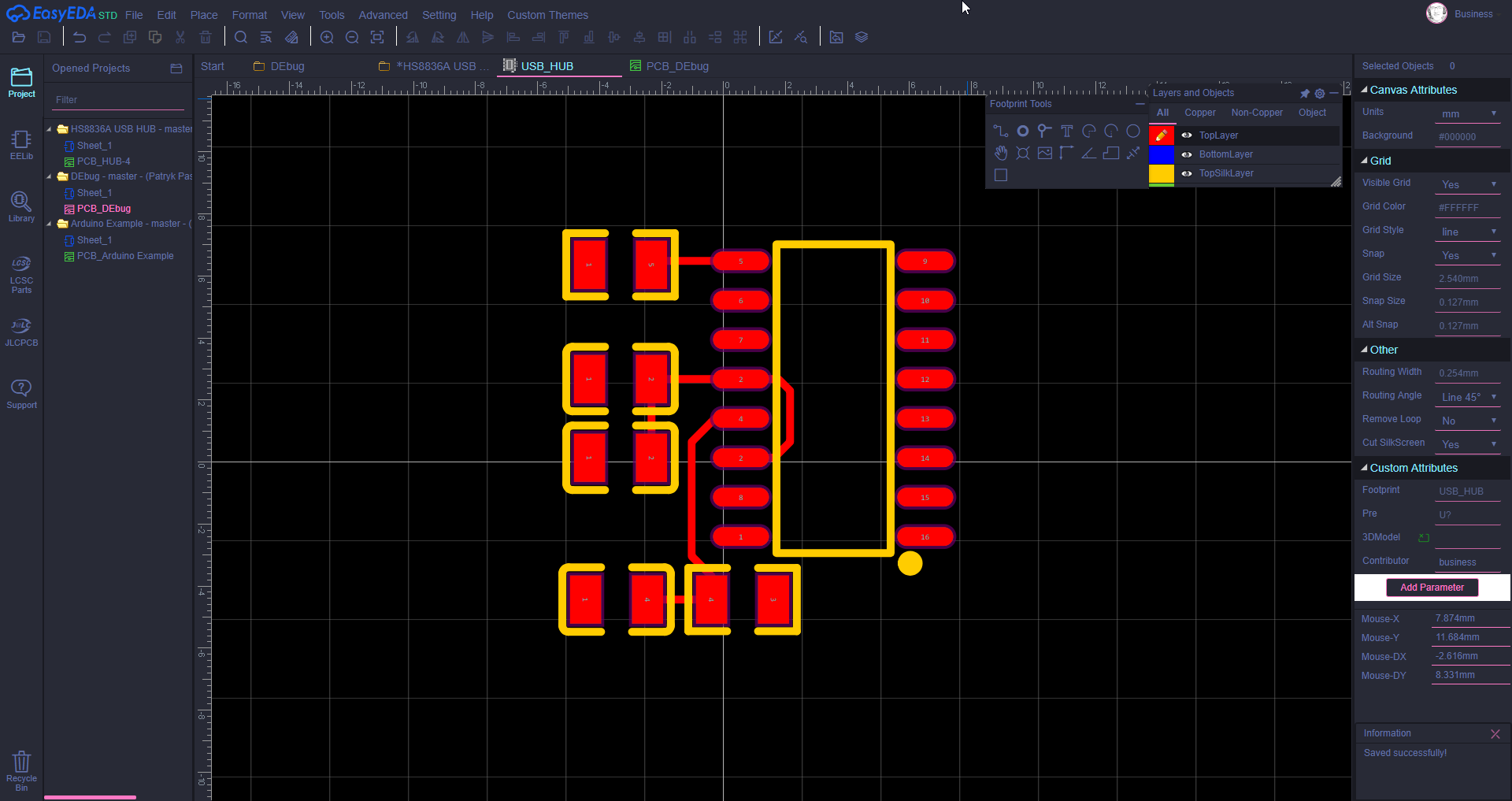
EasyEDA - jak uprościć sobie tworzenie schematów
H1M4W4R1 napisał temat w Oprogramowanie CAD,
- 2 odpowiedzi
Wybrane przez
Treker,
Uchwyt do baterii zrobiony z płytki
deshipu napisał temat w Projekty - DIY,
- 6 odpowiedzi
Wybrane przez
Treker,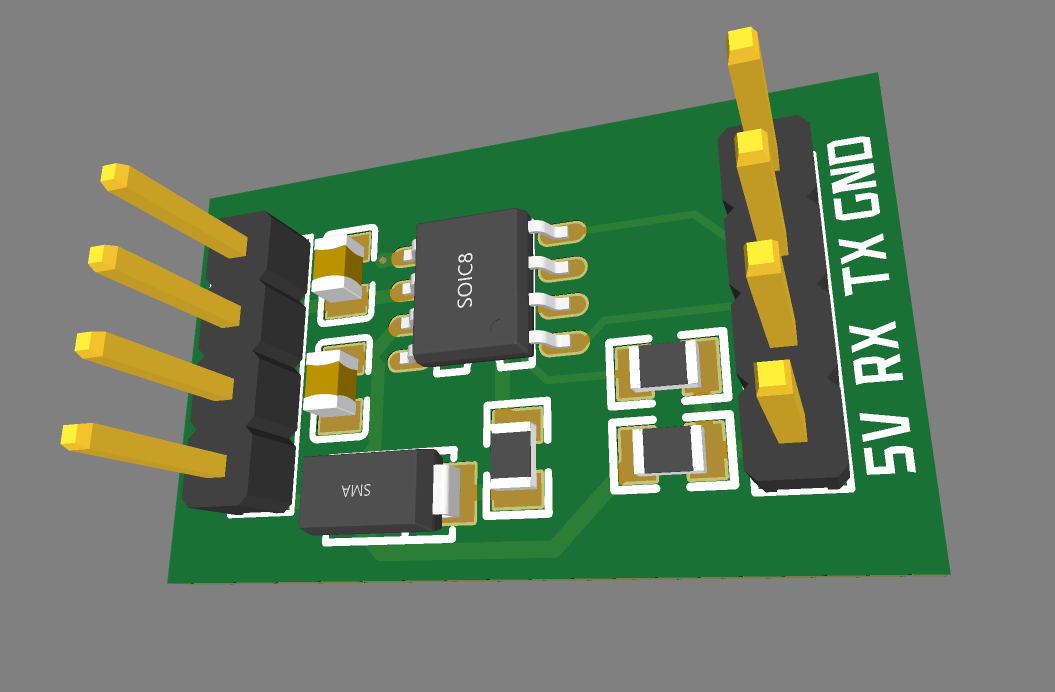
LIN Breakout Board
H1M4W4R1 napisał temat w Projekty - DIY (mini),
- 7 odpowiedzi
Wybrane przez
Treker,
Urządzenie do testowania AFS
H1M4W4R1 napisał temat w Projekty - DIY,
- 6 odpowiedzi