Niezmiernie istotną sprawą w konstrukcji robota jest właściwy dobór czujników. Dostarczają one informacji o stanie otoczenia, jak i samego robota.
Często początkujący zapominają o tej drugiej grupie sensorów. Wtedy dopiero w praktyce mogą przekonać się jak istotne jest zbieranie informacji np.: o poziomie naładowania akumulatorów.
Sensory odpowiedzialne za zbieranie informacji z otoczenia nazywamy eksteroceptorami. Nie istnieje chyba amatorska konstrukcja robota, która nie posiada żadnego czujnika tego typu. Najprostszy LineFollower musi mieć co najmniej 1 czujnik śledzenia linii. W robotach typu Sumo, poza detektorami linii – wyłapującymi granice dojo – muszą być zamontowane czujniki zbliżeniowe.
Do eksteroceptorów zaliczają się różnego rodzaju czujniki zbliżeniowe, detektory linii lub koloru, itd. czyli „oczy i uszy” robota.
Druga grupa – zwana interoceptorami ma za zadanie zbierać informacje o stanie „wewnętrznym” robota. Do tej grupy zaliczają się między innymi enkodery umieszczone w przegubach, monitory baterii i inne.
Zadaniem czujnika jest przekształcenie wielkości mierzonej na sygnał zrozumiały dla jednostki sterującej robota. Sygnałem wyjściowym jest najczęściej napięcie. Wyjścia czujników mogą być dwustanowe (logiczne „0” lub logiczna „1”), zakodowane (sygnał binarny – NKB, Kod Greya, itp.), lub analogowe – wymagające dodatkowego przetwornika ADC.
Pomiar naładowania baterii w robocie
W artykule przedstawiono wybrane metody pomiaru naładowania baterii w robicie mobilnym, a więc różne podejścia do realizacji interoceptora monitorującego stan zasilania robota. Jako, że nie ma sensu budować robotów mobilnych, ciągnących za sobą kabla elektrycznego z zasilaniem (chociaż w trakcie wstępnych testów to rozwiązanie może być stosowane) stosuje się zasilanie akumulatorowe robotów. Dotyczy to zarówno robotów kroczących, jak i kołowych.
W celu oszacowania energii, jaka została do rozładowania akumulatora, monitoruje się napięcie na jego zaciskach. Nie jest to dokładny pomiar, ale w zupełności wystarcza i jest często stosowany także w innych urządzeniach elektronicznych (telefony komórkowe, odtwarzacze MP3, itd.).
Artykuł został podzielony na dwa zasadnicze działy:
pomiar napięcia baterii przy pomocy mikrokontrolera sterującego robotem
pomiar napięcia baterii za pomocą komparatora.
W każdym rozdziale przedstawiono dwie konstrukcje. Schematy mikrokontrolera, przedstawione w rozdziale 2, zawierają tylko niezbędne elementy, potrzebne do konstrukcji układu pomiaru napięcia.
Ponieważ pracuję z akumulatorami NiCd to obliczenia przedstawione w artykule będą dotyczyły tych właśnie akumulatorów. Nie miałem jeszcze okazji pracować z ostatnio bardzo popularnymi w robotyce amatorskiej, akumulatorami LiPoly.
Kilka słów o NiCd
Akumulatory NiCd (niklowo-kadmowe) mają napięcie znamionowe 1,2V na ogniwo. Ogniwa można łączyć szeregowo, w celu zwiększenia napięcia. Najczęściej w robotyce spotyka się akumulatory o 6-10 ogniwach czyli o napięciu znamionowym baterii równym 7,2 – 12V. Jednak napięcie na zaciskach akumulatora nie jest stałe. Związane jest z charakterystyką rozładowania akumulatora i może się zmieniać w przedziale od 1,4 do 1V na ogniwo.
Żadna bateria nie rozładowuje się do napięcia 0V!
Stąd wynika, że dla baterii 7,2V zakres zmian napięcia wynosi 6-8,4V, dla baterii 12V zakres ten wynosi 10-14V. Wartość 1,2V została przyjęta jako znamionowa, ponieważ akumulator utrzymuje mniej więcej takie napięcie przez długi czas rozładowywania. Poniższy rysunek przedstawia charakterystykę rozładowania ogniwa stałymi prądami o różnych wartościach.
Temat poruszany w artykule ma zastosowanie także dla innych typów akumulatorów, po uwzględnieniu różnic w wartościach napięć dla stanu pełnego naładowania i stanu rozładowania.
Pomiar napięcia za pomocą przetwornika ADC
Często spotykanym rozwiązaniem jest pomiar napięcia na akumulatorze za pomocą przetwornika analogowo-cyfrowego (ADC) wbudowanego w strukturę mikrokontrolera. Jest to rozwiązanie proste. Wymaga posiadania jednego wolnego pinu ADC w mikrokontrolerze.
Układy te pracują zasilane napięciem 5V lub mniejszym. Wymagane jest więc obniżenie i stabilizacja napięcia akumulatora. Zwykle stosuje się akumulatory o napięciu wyższym, niż napięcie zasilania mikrokontrolera, żeby stabilizator mógł to napięcie ustabilizować przez „odcięcie” nadwyżki. Takim rozwiązaniem zajmiemy się w pierwszej kolejności.
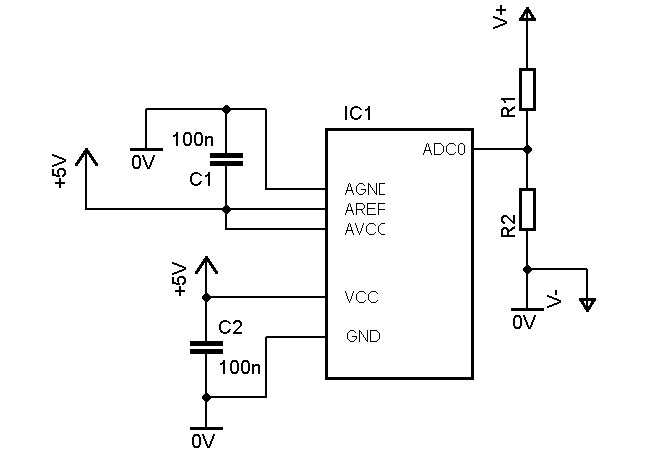
Zakładamy, że napięcie akumulatora wynosi 7,2V, układ sterowania pracuje zasilany 5V. Na rysunku 2 przedstawiony jest typowy układ do pomiaru napięcia na akumulatorze.
Rys.2.Fragment typowego układu do pomiaru napięcia akumulatora V+ = Ubat > 5V.
Aby nie zniszczyć mikrokontrolera napięcie mierzone musi być mniejsze od 5V. Doprowadzamy więc do wejścia ADC mikrokontrolera napięcie obniżone na rezystancyjnym dzielniku napięcia – R1, R2 (rys. 2.). Napięcie na wyjściu dzielnika napięcia (DN) wyraża się wzorem:
Wartości rezystorów R1 i R2 dobieramy zgodnie z tym wzorem, w taki sposób, aby przy maksymalnym naładowaniu akumulatora napięcie na wyjściu DN było mniejsze od 5V.
Dla przyjętego w założeniu akumulatora (7,2V) mamy maksymalne napięcie na baterii 8,4V, a ponieważ mamy jedno równanie i dwie zmienne przyjmujemy także wartość R2 = 4k7. Z równania wyszło nam, że R1 = 3k19. Dobieramy R1 =3k3 (najbliższa wyższa wartość z szeregu). Dla znanych wartości R1 i R2 obliczamy napięcie UADC0MAX = 4,94V. Należy jeszcze obliczyć wartość napięcia dla tych samych wartości R1 i R2, przy rozładowanym akumulatorze (6V). Otrzymamy wartość UADC0MIN = 3,53V.
Przetwornik ADC podaje wartość zmierzoną, nie bezpośrednio w woltach, a w działkach. Przy AREF = 5V, oraz 8-bitowym przetworniku (wartość maksymalna 255) wartość w działkach możemy obliczyć z proporcji:
Dla napięć 4,94 i 3,53 otrzymamy odpowiednio wartości w działkach: 253 i 180 dz. Mając te wartości możemy zaprogramować nasz procesor, żeby informował nas o niskim napięciu na akumulatorze przy ok. 185-190 dz.
Inne zastosowanie przetwornika ADC
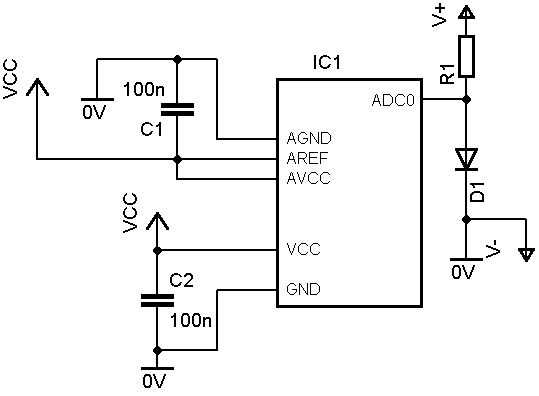
Chciałbym teraz przedstawić nietypowe wykorzystanie przetwornika ADC w sytuacji, kiedy napięcie akumulatora wynosi 4,8V i jest podawane na układ bez stabilizacji. Schemat takiego układu przedstawiony został na rysunku 3.
Rys.3. Schemat układu, w którym V+ = UCC.
Tym razem zamiast DN R1, R2 mamy dzielnik diodowo-rezystancyjny R1, D1. Wartość R1 dobieramy w taki sposób, aby napięcie na przewodzącej D1 wynosiło UD1 = 0,7V (typowe napięcie na przewodzącej diodzie).
W poprzednim układzie wartość na wyjściu DN była proporcjonalna do napięcia na akumulatorze. Tym razem mamy stałe napięcie na DN, zmienia się natomiast, wraz ze zmianą napięcia na akumulatorze, napięcie odniesienia AREF. O ile nic się nie zmienia w działaniu naszego przetwornika ADC, to w efekcie przy zmniejszaniu napięcia akumulatora rośnie wartość zmierzona przez przetwornik ADC, ponieważ maleje różnica między wartością mierzoną (0,7V) a wartością odniesienia (UCC).
Jako przykład obliczona zostanie liczba działek przy pełnym i rozładowanym akumulatorze o napięciu 4,8V. Zakres zmian napięcia na tym akumulatorze wynosi 6 – 4V. Przedstawiona wyżej proporcja ulega zmianie:
Otrzymujemy z niej następujące wartości 6V -> 29dz, 4V -> 44dz.
Komparator - pomiar napięcia bez przetwornika ADC
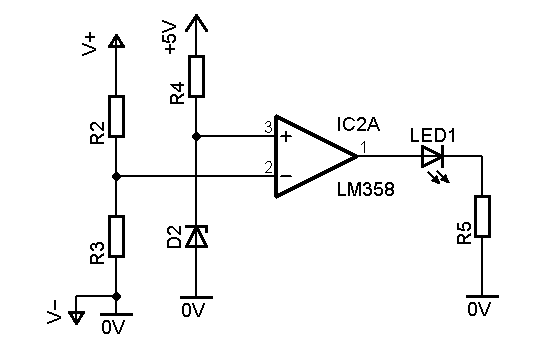
Na rysunku 4 przedstawiono schemat układu komparatora. Układ LM358 został wybrany ponieważ nie potrzebuje on symetrycznego zasilania. Wzmacniacz operacyjny pracuje w układzie komparatora napięć, tzn. porównuje napięcie podane na wejście nieodwracające (+) z napięciem podanym na wejście odwracające (-).
Jeżeli U+ > U-, wtedy na wyjściu Uwy = UCC. W przeciwnym wypadku Uwy = 0.
Dioda LED1 sygnalizuje świeceniem stan rozładowania akumulatora.
Rys.4. Układ komparatora napięcia.
Układ porównuje napięcie na diodzie Zenera D2, z napięciem z DN R2, R3. Wartości rezystorów należy dobrać w taki sposób, aby przy niskim napięciu na akumulatorze UD2 > UR3. Równanie DN zostało podane wyżej. Napięcie wyjściowe może sterować diodą lub może być podawane na wejście mikroprocesora. „0” – akumulator naładowany, „1” – akumulator rozładowany.
Podam przykładowe rozwiązanie dla akumulatora 7,2V i diody o napięciu 3,6V. W takim przypadku otrzymamy wartości R2 = 4k7, R3 = 3k3.
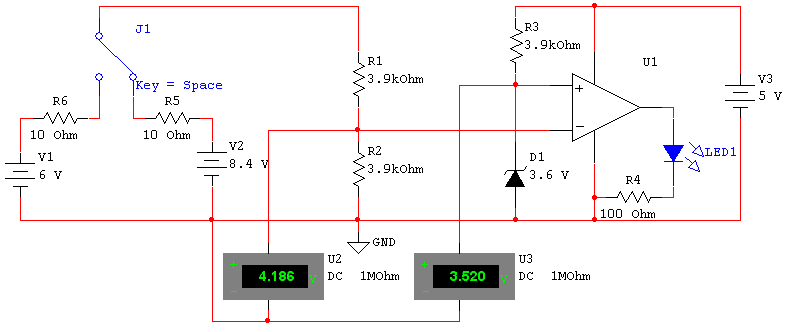
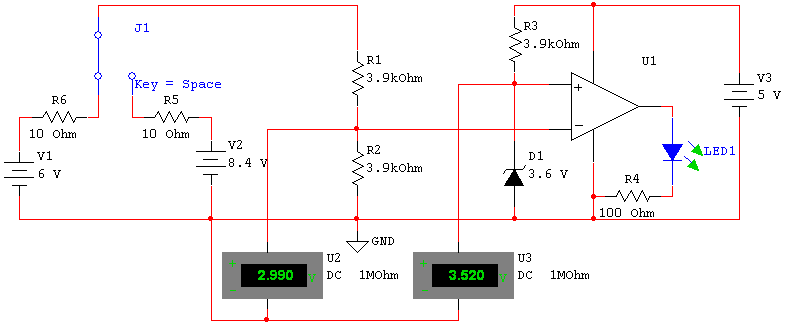
Zasadę działania komparatora prezentuje rysunek 5. Na rysunku a napięcie baterii jest większe niż napięcie odniesienia na diodzie Zenera i LED na wyjściu nie świeci. Na rysunku b jest sytuacja odwrotna – napięcie baterii jest mniejsze niż napięcie Zenera na diodzie Zenera – komparator wystawia stan wysoki – LED świeci (w symulacji na zielono).
a) akumulator naładowany
b) akumulator rozładowany
Rys.5. Zasada działania komparatora napięć
Projektując taki układ należy pamiętać, że zarówno rezystory, jak i diody Zenera posiadają wartości pogrupowane wg typoszeregu. Można jednak skorzystać z regulowanej diody Zenera (np. LM431), aby precyzyjnie ustawić próg zadziałania czujnika. Dodatkowo układ można wyposażyć w dodatnie sprzężenie zwrotne.
Zastosowanie dodatniego sprzężenia zwrotnego poprawi nieco działanie układu zawężając przedział zadziałania diody do konkretnej wartości napięcia.
Pomiar napięcia wykorzystaniem sterownika LED
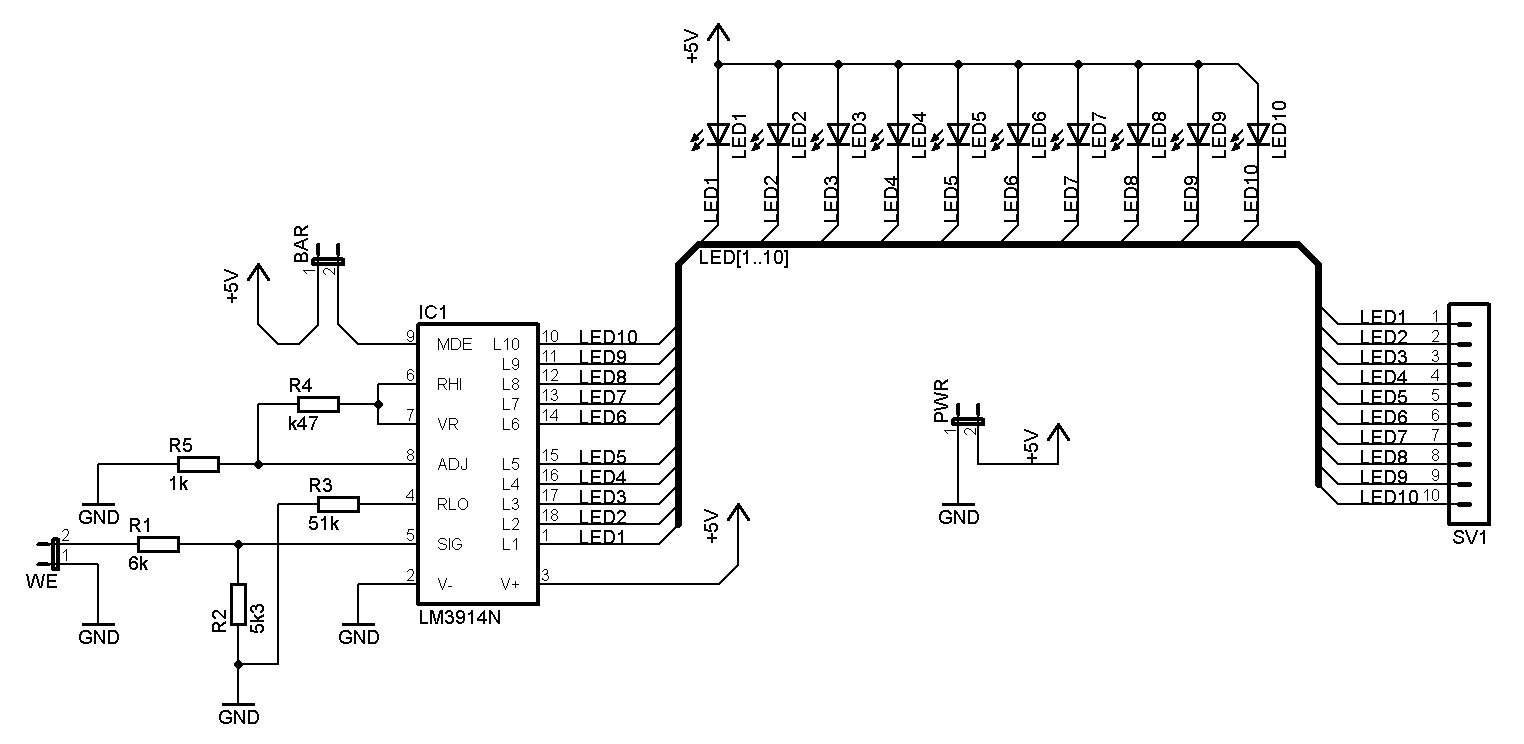
Ostatni układ zawiera scalony sterownik diod LM3914. Układ ten steruje świeceniem 10 diodami w trybie pojedynczym (DOT) lub w trybie linijki (BAR). Schemat układu monitora baterii z wykorzystaniem LM3914 jest przedstawiony na rysunku 6. Wewnątrz struktury układu scalonego znajduje się dziesięć komparatorów porównujących napięcie wejściowe z napięciem z linijki rezystancyjnego DN. Dokumentacja układu scalonego znajduje się w [2].
Rys.6. Schemat monitora napięcia.
Nietypowym elementem w układzie jest rezystor R3. Wejście RLO w typowych zastosowaniach jest podłączone do masy. Podłączenie rezystora R3 powoduje zawężenie zakresu napięć wewnętrznego DN, porównywanych przez komparatory, do zakresu, w jakim zmienia się napięcie akumulatora.
Odpowiednio dobierając wartość R3 możemy wysterować układ tak, aby przy minimalnym napięciu na akumulatorze świeciła dioda LED1. Napięcie akumulatora jest podawane przez DN (R1, R2) na wejście SIG. Rezystory R4 i R5 służą do konfigurowania wewnętrznego źródła odniesienia wbudowanego w IC1. Dodatkowe złącze SV1 umożliwia podpięcie dowolnego wyjścia do mikroprocesora. Zwora BAR powoduje zmianę trybu pracy Dot/Bar (jedna dioda/linijka diodowa).
Do artykułu dołączam schemat ideowy tego monitora napięcia wykonany w programie Eagle 5.6.0. oraz „kalkulator” wartości rezystorów R1 – R5 ułatwiający dobór ich wartości dla dowolnego akumulatora. W „kalkulatorze” należy podać odpowiednie wartości napięć i rezystorów w białych polach, pola szare są liczone automatycznie.
Należy pamiętać, że wyliczone wartości rezystorów najprawdopodobniej nie trafią w wartości z typoszeregu. Dlatego każdej obliczonej wartości rezystancji odpowiada kratka z wartością dobraną. Napięcia wyjściowe są liczone na podstawie rzeczywistych wartości rezystancji!
Zakończenie
W artykule przedstawiono cztery rozwiązania monitorów napięcia akumulatorów stosowane w robotyce. W przypadku rozwiązań pierwszego typu – wykonanych z wykorzystaniem ADC wbudowanego w mikrokontroler, zaletą jest brak dodatkowych układów scalonych. Wady tego rozwiązania są następujące:
trzeba się zastanowić nad sposobami informowania użytkownika o niskim poziomie napięcia (wyświetlacz, dioda sygnalizacyjna),
dodatkowa komplikacja programu sterującego,
konieczność uwzględnienia monitora w trakcie projektowania płytki sterownika,
rozdzielczość pomiaru nie wykorzystuje całego zakresu pomiarowego przetwornika ADC.
W przypadku rozwiązań drugiego typu (bez przetwornika ADC), podstawową zaletą jest możliwość dołączenia takiego monitora w dowolnym momencie, w postaci dodatkowego moduł. Zaletami przykładu drugiego jest jego efektowność (świecące diody sygnalizujące stan akumulatora), możliwość pracy z zaświeconą tylko jedną diodą (rozwiązanie ekonomiczne) lub świecącą linijką (rozwiązanie efektowne).
Wadą przykładu pierwszego jest detekcja tylko dwóch stanów (naładowany/rozładowany). Wadą drugiego rozwiązania jest jego rozdzielczość (10 diod). Obydwa układy mogą współpracować z mikrokontrolerem. W przypadku drugim można wybrać jeden lub więcej poziomów (np. akumulator w pełni naładowany, rozładowany, stan krytyczny). Wymagana jest dostępność odpowiedniej liczby wejść w procesorze. Sygnały są w postaci cyfrowej.
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.







![Rys.1.Charakterystyka rozładowania ogniwa NiCd [1].](https://cdn.forbot.pl/blog/wp-content/uploads/2015/06/NiCD_akumulator_rozladowanie_wykres.jpg)
















Trwa ładowanie komentarzy...