Budową LineFollowerów i startem w zawodach zajmuję się od kilku lat. W poprzednim sezonie mój robot był najszybszy podczas wszystkich konkursów, w których startował jako LF Standard. Budowa dobrego robota nie jest jednak zadaniem prostym. Płynna jazda powyżej 1 m/s jest dla wielu konstruktorów dużym wyzwaniem.
Zanim zbudowałem robota, który wygrywał zawody, przeprowadziłem liczne testy. Wyciągnąłem z nich naprawdę dużo wniosków. W artykule zebrałem 8 najważniejszych sekretów szybkiego LineFollowera. Mam nadzieje, że będą one pomocne, gdy będziesz budował swojego robota!
Dla całkowicie początkujących przypominam jeszcze w skrócie czym są LineFollowery:
LineFollower - (Linefollowery) to roboty startujące w zawodach, [...] których zadaniem jest przejechanie wyznaczonej trasy w jak najkrótszym czasie, roboty ścigają się na białym podłożu z czarną trasą (lub odwrotnie).
Nie da się zbudować szybkiego robota bez odpowiednich silników napędzających konstrukcje. Sprawą oczywistą jest, że napęd musi zapewnić odpowiednią ilość obrotów. Jednak konstruktorzy zapominają często o drugim parametrze – momencie obrotowym. To właśnie on jest kluczowy, gdy robot musi wykonywać szybkie zwroty i reagować na nagłe zmiany linii.
Maksymalne obroty silnika nie pomogą, jeśli nie będziemy w stanie ich nigdy osiągnąć. Nie należy przesadzać. Wybierając silniki do swojego robota poszukaj takich, które są w stanie zapewnić jak największy moment przy maksymalnej prędkości obrotowej rzędu 1000 – 3000 RPM.
Sekret 2 – Proporcje kół
Odpowiednie koła, to podstawa sukcesu. Robot nie może tracić przyczepności! Felgii powinni być lekkie i stosunkowo niskie tak, aby nie wprowadzały zbędnej bezwładności na wale silnika.
Po przeprowadzonych testach mogę powiedzieć, że zdecydowanie najlepiej sprawdzają się koła, których średnica jest 1.5-2 razy mniejsza od szerokości koła. Takie „cienkie wałki” sprawdzą się idealnie podczas gwałtownych zakrętów.
Przykładowe koła pokryte poliuretanem. Jednak, aby były idealne powinny zostać minimalnie wydłużone.
Równie ważne jest pokrycie felg materiałem, który zapewni robotowi odpowiednia przyczepność. Tutaj do wyboru mamy kilka możliwości. Opony mogą być odlane z sylikonu lub poliuretanu. Ten ostatni sprawdzi się najlepiej, jednak jest stosunkowo drogi i trudno dostępny. Trzecia możliwość to wykorzystanie miękkich oponek dedykowanych do zdalnie sterowanych modeli Mini-Z.
Sekret 3 – Liczba i ułożenie czujników
Swego czasu popularna w robotach była duża liczba czujników linii. Powstawały konstrukcje, które mogły pochwalić się ponad 20 sensorami ułożonymi w dziwne wzory. Na początku sam używałem ~20 transoptorów, był to jednak błąd.
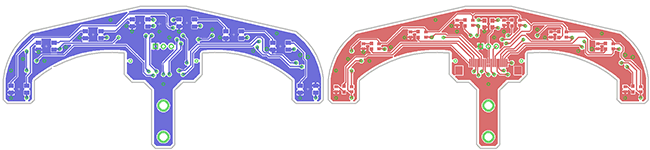
Ułożenie czujników w moich robotach.
Zdecydowanie lepiej sprawdza się np.: 8 czujników ułożonych w delikatnym półkolu. Rozwiązanie to pozwala na pokonywanie nawet najbardziej skomplikowanych elementów trasy. Co więcej, mniej czujników, to mniejsza bezwładność konstrukcji, o czym więcej w kolejnym punkcie.
Sekret 4 – konstrukcja mechaniczna
Zapomnij o dociążaniu przodu, równym rozkładaniu masy i innych dziwnych zabiegach. Pamiętaj, robot musi być lekki, a jego środek ciężkości jak najbliżej kół.
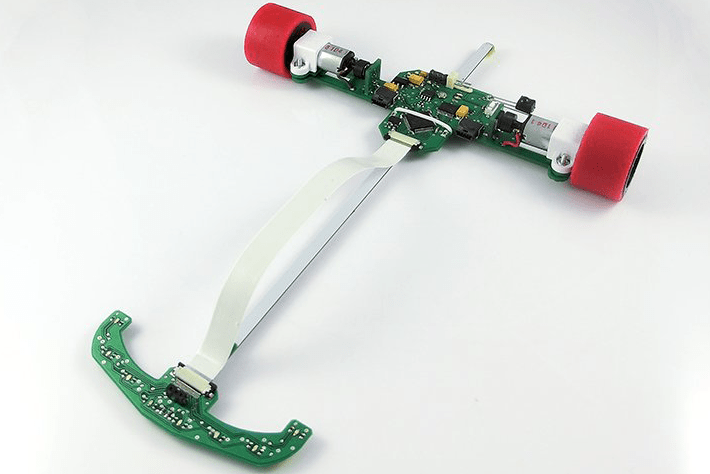
Podczas zawodów robot często skręca, nie możemy sobie pozwolić na nadmiar masy. Idealna konstrukcja, to płytka zawierająca silniki wraz z całą elektroniką oraz druga znacznie mniejsza z czujnikami.
Eksperymentalnie dobrana proporcja odległości czujników od silników.
Obie części powinny być połączone lekką listewką. Należy mieć na uwadze, że każdy dodatkowy "gram" wysunięty do przodu wprowadza nam szkodliwą bezwładność!
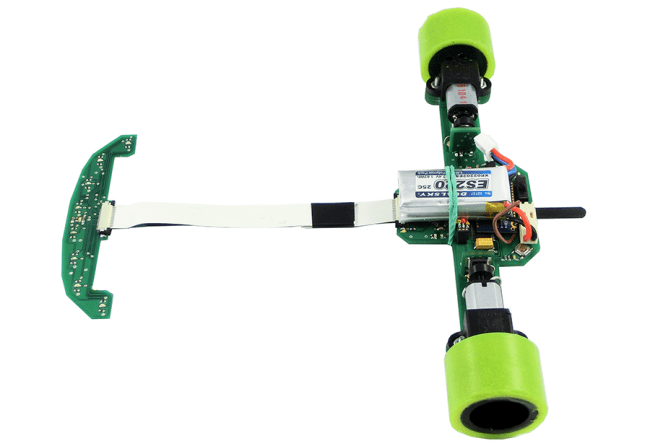
Sekret 5 – Mądrze dobrane zasilanie
Przejazd szybkiego LineFollowera nie trwa dłużej niż 20 sekund. Dlatego nie musisz robota obciążać dużym akumulatorem (np.: LiPo). W moich konstrukcjach stosuję pakiety o pojemności 100-250mAh. Wystarczają one na kilka(naście) przejazdów. Dobrym nawykiem jest jednak częste ładowanie i wymienianie akumulatorów.
Zdecydowanie lepsze efekty osiągniesz z mniejszym akumulatorem, ponieważ będzie lżejszy od większych odpowiedników. Dobierając źródło zasilania pamiętaj jednak, że silniki podczas nagłej zmiany obrotów mogą pobierać duży prąd. Akumulator musi sprostać takiemu zadaniu.
Sekret 6 – Oprogramowanie
Jeśli liczysz na dobre wyniki (a liczysz, prawda?) musisz zapomnieć o programach zbudowanych z dużej ilości warunków lub instrukcji switch.
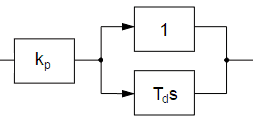
Schemat blokowy regulatora PD.
Prędzej, czy później będziesz korzystał z regulatora PID. Konkretnie PD, ponieważ człon całkujący nie nadaje się do sterowania obiektami, w których uchyb zmienia się tak szybko jak w LFach.
Sekret 7 – Łatwa zmiana ustawień
Dobry program to tylko połowa sukcesu. Zarówno podczas testów, jak i na zawodach często będziesz chciał/musiał zmieniać pewne parametry. Mogą to być takie wartości jak maksymalna prędkość, wzmocnienie poszczególnych członów itd.
Zmiana ustawień poprzez edycje zmiennych w programie, kompilacje i wgranie nowego wsadu to duży błąd. Budując szybkiego robota będziesz musiał wykonać dużo prób. Zdecydowanie szybciej i łatwiej zrobisz to z dedykowanym kontrolerem lub aplikacją.
Przykładowy ekran ustawień mojego kontrolera.
Możesz zbudować osobny, przewodowy panel do zmiany ustawień lub zamontować moduł Bluetooth. Ostatnie rozwiązanie pozwoli na komunikację z telefonem lub komputerem.
Sekret 8 – Testy, czyli klucz do sukcesu
Gdy zbudujesz robota, uruchomisz go i dobierzesz wstępne nastawy nie możesz tylko czekać do zawodów. Pamiętaj, że na turnieju robot będzie jeździł przy innym oświetleniu oraz na trasie wykonanej z innego materiału.
Przykładowy przejazd robota.
LineFollower osiągający duże prędkości na trasie z płyty HDF kompletnie nie poradzi sobie na trasie bannerowej (i odwrotnie). Jeśli przed zawodami zostanie Ci trochę czasu postaraj się przetestować robota na różnych podłożach. Sprawdź również jak radzi sobie ze śledzeniem linii, gdy trasa znajduje się w nasłonecznionym miejscu.
Podsumowanie
Teraz, gdy znasz 8 najważniejszych sekretów szybkich LineFollowerów możesz zacząć projektowanie własnego robota. Pamiętaj, że na swojej drodze napotkasz wiele problemów. Jednak unikniesz największych błędów, jeśli na spokojnie przeanalizujesz moją listę.
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.

























Trwa ładowanie komentarzy...