Kursy • Poradniki • Inspirujące DIY • Forum





Wpisy autora: , strona 26
Microswitche jako proste czujniki przeszkód
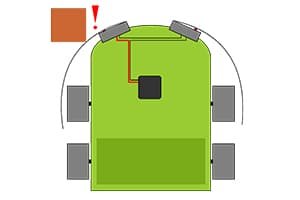
Artykuł ten omawia użycie krańcówek oraz microswitchy w robotyce.
Jest to stosunkowo tania i prosta metoda na zapewnienie konstrukcji podstawowego kontaktu z otoczeniem np.: przez wykrywanie przeszkód i skuteczne ich omijanie.
Porównanie skrzydeł kolibrów i wirników microcopterów

Kolibry mają za sobą ponad 42 miliony lat ewolucji, nic więc dziwnego, że w precyzyjnym lataniu są lepsze od mikrokopterów.
Wyniki badań opublikowanych w „Journal of the Royal Society Interface” wykazały jednak, że ptaki nie są wcale dużo lepsze od ich mechanicznych odpowiedników.
O układach AVR XMega – recenzja „AVR. Układy peryferyjne”

„AVR. Układy peryferyjne” to kolejna książka Tomasza Francuza o AVR-ach. Pierwsza z nich w całości poświęcona była mikrokontrolerom AVR ATmega oraz ATtiny firmy Atmel.
Wydana w 2013 roku książka „AVR. Praktyczne projekty” oraz omawiana tegoroczna pozycja w całości skupiają się na nowej rodzinie produktów firmy Atmel - XMEGA.
RFM12B – #1 – Czyli wstęp do komunikacji radiowej

Niejednokrotnie w robotyce pojawia się potrzeba komunikacji z urządzeniem. W przeróżnych celach – począwszy od wydawania poleceń (np. szukaj piłeczki, przynieś), poprzez monitorowanie pracy a na kalibracji czujników skończywszy.
Powodów jest bardzo wiele, tak samo jak i dróg, którymi możemy tę komunikację prowadzić.
Dwa dodatkowe palce od MIT

Ludzie często żartują, że brakuje im trzeciej ręki. Niektórzy rzeczywiście chcieliby mieć jedną dodatkową rękę lub parę rąk.
Co powiecie na dodatkową parę… palców?
Systemy kontroli wersji – Mercurial
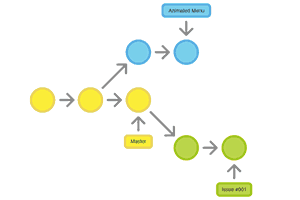
Pracowałeś nad większym projektem i bałeś się przystępować do większych zmian w kodzie?
Zaśmiecałeś dysk folderami typu projekt1, projekt2. Wykomentowywałeś duże bloki kodu, żeby dało się je szybko przywrócić jeśli coś przestanie działać? Czas na wprowadzenie systemu kontroli wersji Mercurial!
Jak unikać pułapek języka C? Częste błędy początkujących
Dobry programista powinien wiedzieć jakie aspekty języka są niebezpieczne i umiejętnie sobie z nimi radzić.
W artykule przybliżę kilka niebezpiecznych sytuacji. Niektóre będą oczywiste, albo wręcz śmieszne, inne mogą dotyczyć aspektów z których wiele osób nie zdaje sobie spawy.
Sekrety profesjonalnego programowania

Niniejszy artykuł różni się od większości materiałów dotyczących programowania z którymi mogliście mieć styczność.
Nie wyniesiecie z niego żadnej wiedzy dotyczącej konkretnego procesora czy modułu. Co więcej, kodu będzie tutaj bardzo mało, omówione zostaną tylko techniki jego tworzenia.
Raspberry Pi w robotyce amatorskiej – #3 – Programowanie
W pierwszych dwóch częściach poznaliśmy, czym właściwie jest komputerek i uruchomiliśmy go. Teraz, gdy mniej ważne sprawy nie zajmują nam czasu, możemy zająć się programowaniem.
Dowiemy się m.in. jak zmusić Raspberry Pi do rozmowy z innymi układami, wykorzystując do tego różne dostępne interfejsy komunikacyjne.





Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.




