Kursy • Poradniki • Inspirujące DIY • Forum





Wpisy autora: , strona 27
Raspberry Pi w robotyce amatorskiej – #2 – Konfiguracja

Po pierwszej części artykułu zapraszam do jego kontynuacji, gdzie postaram się przejść ze stadium "mam Raspberry Pi" do etapu "mogę zacząć pracę i zabawę".
Obejmuje to przygotowanie karty SD z odpowiednim systemem operacyjnym, poznanie środowiska graficznego oraz zapewnienie połączenia z internetem.
Raspberry Pi w robotyce amatorskiej – #1 – wprowadzenie

Wielce nieprawdopodobnym jest, by ktoś związany z branżą elektroniczną, robotyczną lub informatyczną nie słyszał o „superkomputerze Raspberry Pi”.
Nie ma w tym nic zadziwiającego. Jeszcze na długo przed fazą produkcji zaczęły zawiązywać się malinowe fankluby.
Silniki elektryczne: szczotkowe, bezszczotkowe, krokowe
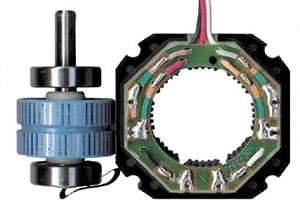
W artykule chciałbym przedstawić, zagadnienia, związane ze silnikami elektrycznymi, które z pewnością już znacie. Artykuł ten kieruję jednak do osób początkujących, które rozpoczynają, wspaniałą przygodę z robotyką i automatyką.
Bardziej doświadczone osoby proszę, aby potraktowały ten tekst jako małą powtórkę dotyczącą silników elektrycznych.
Akumulatory litowo-polimerowe, Li-po – kompendium cz.3

Trzecia, ostatnia części kompendium porusza temat odpowiedniego przechowywania pakietów litowo-polimerowych.
Sporo miejsca poświęcono również bezpieczeństwu. Akumulatory te w mgnieniu oka mogą zamienić się w bombę. Sprawdź, czy wiesz jak tego uniknąć!
Akumulatory litowo-polimerowe, Li-po – kompendium cz.2

W drugiej części kompendium zajmiemy się ładowaniem akumulatorów li-po. Od tanich i prostych, po drogie i zaawansowane ładowarki mikroprocesorowe.
Omówiona zostanie również charakterystyka pakietów. Pokażemy, jak przestrzegając kilku zasad, można używać ich znacznie dłużej i bezpieczniej.
Akumulatory litowo-polimerowe, Li-po – kompendium cz.1

Akumulatory (baterie) litowo-polimerowe (li-po, li-pol), to chyba najczęstszy wybór robotyków i modelarzy.
Jeżeli szukasz odpowiedniego źródła zasilania do swojej konstrukcji, a nie jesteś jeszcze zdecydowany, przeczytaj nasze kompendium. Znajdziesz tu informacje dotyczące konfiguracji, bezpieczeństwa oraz obsługi baterii li-po.
Port szeregowy i interfejs USART – #2
Poprzednia część praktycznie w całości została poświęcona tworzeniu programu od strony komputera. Teraz przyszła pora zająć się mikrokontrolerem.
W tej części dokonałem przeglądu prostych technik programistycznych związanych z pisaniem programu na AVRa.
Roboty kroczące – konstrukcja mechaniczna
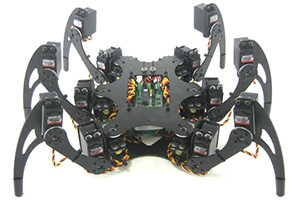
Roboty kroczące zyskują ostatnio coraz większą popularność. Z konstrukcji budowanych tylko w ośrodkach badawczych stały się urządzeniami komercyjnymi oraz budowanymi amatorsko.
W artykule omówione zostały podstawy, związane z konstrukcją mechaniczną robotów kroczących.
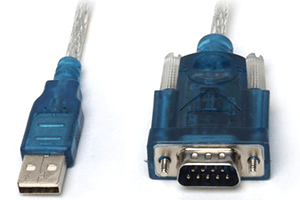
Port szeregowy i interfejs USART, czyli komunikacja z PC
Zauważyłem, że problem komunikacji z komputerem za pomocą portu szeregowego jest często poruszany na naszym forum.
Napisałem kilka programów komunikacyjnych, dlatego postanowiłem stworzyć ten mały tutorial. W artykule opiszę interfejs USART, w który wyposażona jest większość mikrokontrolerów.





Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.




