Zwykłe czujniki odległości nie pozwalają łatwo uzyskać ważnej informacji, którą jest kąt pod jakim znajdują się względem przeszkody. Taki parametr pozwala np. robotowi, aby łatwo ominął obiekty napotkane na swojej drodze.
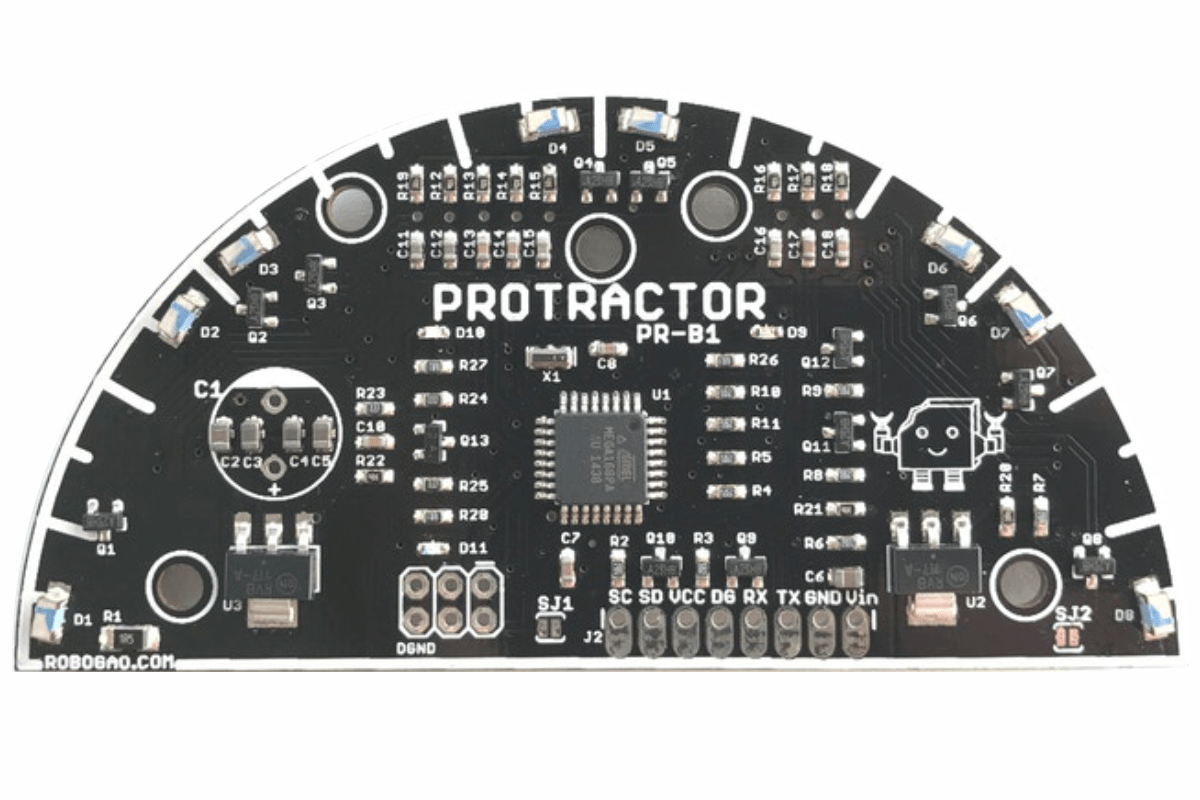
Protractor, to projekt rozbudowanego sensora, który potrafi określić swoje dokładne położenie względem przeszkód.
W robotyce mobilnej często pojawiającym się zadaniem jest omijanie przeszkód. O ile użycie czujników odbiciowych jest dobrym pomysłem przy pomiarze odległości od przeszkód, to stwierdzenie pod jakim kątem jest przeszkoda będzie już trudniejsze.
Koniecznie jest użycie kilku sensorów rozmieszczonych w odpowiedni sposób oraz przetwarzanie zebranych z nich informacji. Wszystko to da się uprościć, przykładem jest projekt Protractor:
Autor sensora zaproponował, aby użyć kilku czujników odbiciowych, które umieszczone są pod odpowiednimi kątami na jednej płytce PCB. Z ich odczytów można się dowiedzieć jak duża jest przeszkoda oraz gdzie dokładnie się znajduje.
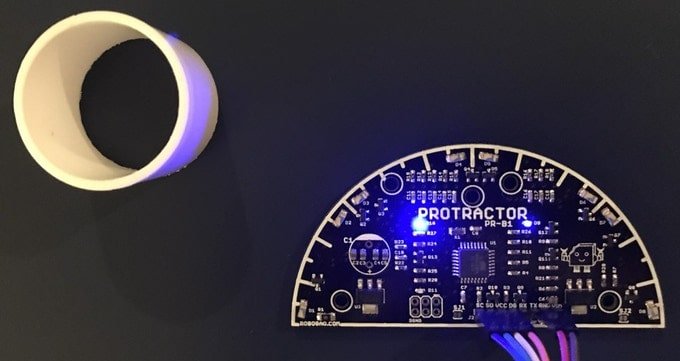
Moduł Protractor precyzyjnie wykrywa przeszkody.
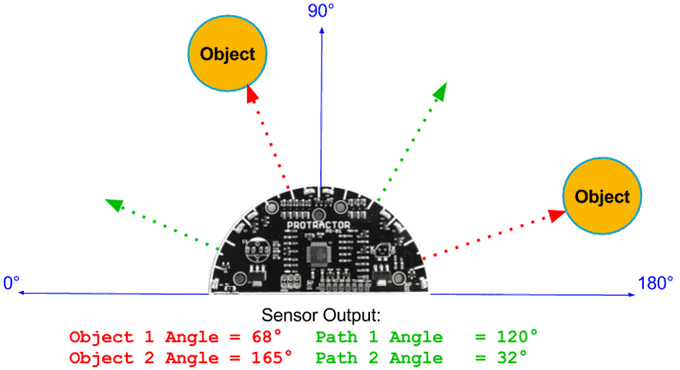
Takie podejście sprawia, że moduł może informować o wielu przeszkodach widzianych w zakresie od 0º do 180º. W podanym zakresie nie występują martwe pola, które nastręczają problemów każdemu użytkownikowi popularnych dalmierzy optycznych.
Możliwość pomiaru kąta do kilku przeszkód.
Wszystkie obliczenia wykonywane są po stronie modułu, a wynik zwracany jest w wygodnej formie poprzez magistrale I2C lub UART. Dzięki temu moduł jest kompatybilny z niemalże każdą hobbystyczną platformą, w szczególności z Arduino, do którego dostępna jest biblioteka modułu.
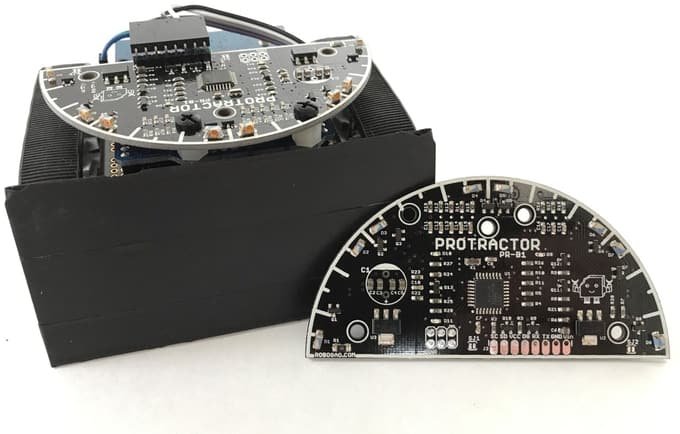
Protractor umieszczony na robocie Zumo.
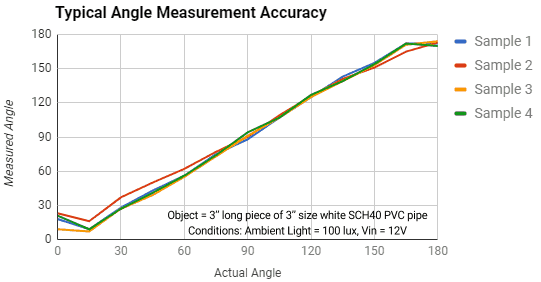
Moduł cechuje dość dobra dokładność (co widać na poniższym wykresie), przy zachowaniu wysokiej częstotliwości odświeżania odczytów (66 Hz). Czujnik jest w stanie wykryć przeszkody oddalone nawet o 40 cm. Trzeba jednak pamiętać, że sensory tego typu są wrażliwe na kolor przeszkód oraz natężenie światła otoczenia.
Wykres zależności kąta pomierzonego od rzeczywistego.
Czujnik jest bardzo prosty w użyciu i powinien sprawdzić się w wielu hobbystycznych robotach mobilnych. Więcej informacji o projekcie można znaleźć na stronie kampanii. Do tej pory zebrano ponad 480% wymaganej kwoty, a do końca zbiórki pozostało jeszcze 27 dni.
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.






















Trwa ładowanie komentarzy...