Bieg to pożądana umiejętność wśród robotów. Zazwyczaj jest to jednak możliwe tylko przy użyciu czujników, dzięki którym mózg maszyny otrzymuje potrzebne informacje.
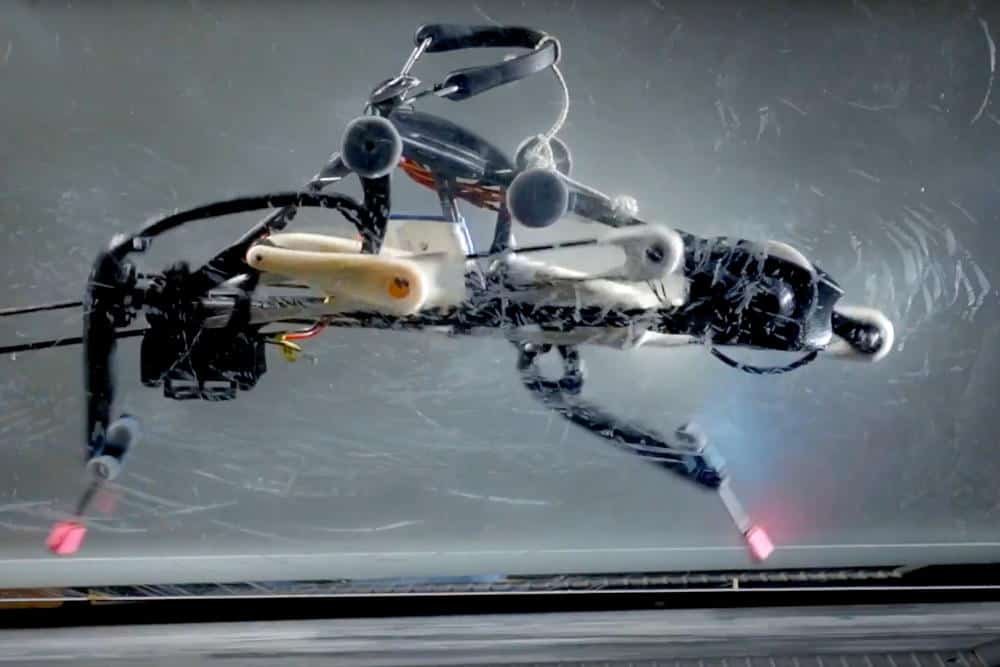
Zupełnie innym rozwiązaniem jest dwunożny PER (Planar Elliptical Runner). Bieg możliwy jest dzięki specjalnej, stabilnej dynamicznie konstrukcji.
Przypominające strusia dzieło wynalazców z IHMC to pierwszy biped, który porusza się w ten sposób. Jego prędkość dochodzi do 16 km/h. Gdyby robot był wielkości człowieka, to mógłby poruszać się z prędkością dochodzącą do 48 km/h.
Konstrukcja jest prosta i lekka – wystarcza tu tylko jeden silnik, który wprawia nogi w ruch eliptyczny. W stabilizacji pomaga sam kształt PER-a, a także reaktywna sprężystość polegająca na zwiększaniu mocy oraz korygowaniu pozycji tylnej kończyny za każdym razem, gdy przednia noga napotyka opór.
Na razie do pełnego utrzymania równowagi PER potrzebuje wsparcia dwóch szklanych ścian umieszczonych po jego lewej i prawej stronie. Jednak symulacja komputerowa ulepszonego urządzenia pokazała już, że jego nowa wersja będzie bez problemu biec bez tego ułatwienia.
Dwunożne roboty są niezastąpione w miejscach przeznaczonych dla ludzi, które z różnych powodów są dla nich niebezpieczne lub niedostępne.
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.






















Trwa ładowanie komentarzy...