Chwytanie i podnoszenie przedmiotów przychodzi ludziom z łatwością dzięki powtarzaniu tych czynności w dzieciństwie. W podobny sposób mogą się uczyć także roboty.
Autonomiczne ramiona robotyczne używane przez Google przeniosły różne przedmioty z miejsca na miejsce aż 800 tysięcy razy.
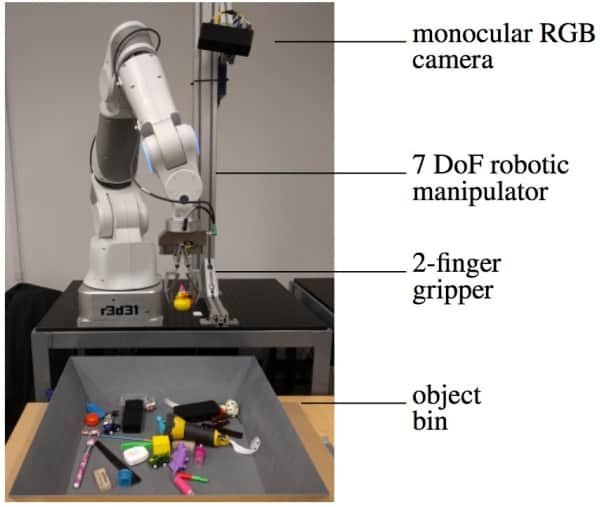
Ludzie i zwierzęta wykorzystują do tego celu nie tylko ręce, ale i oczy. Tę samą funkcję pełnią systemy wizyjne, dzięki którym zwiększa się precyzja ruchów robotów. Jest to szczególnie ważne, gdy obiekty zmieniają swoje położenie podczas chwytania, czyli praktycznie zawsze w realnych sytuacjach.
W eksperymencie uczestniczyło 14 maszyn. Każde ramię miało 7 stopni swobody i posiadało kamerę RGB z czujnikiem głębi.
Związek pomiędzy danymi z czujników i wykonywaną czynnością nie zawsze jest oczywisty. Uczenie robotów wykonywania wszystkich indywidualnych czynności byłoby trudne. Dlatego ich twórcy postawili na samodzielną naukę przy użyciu sieci neuronowej.
Wszystkie procesy były całkowicie autonomiczne – udział ludzi ograniczył się do przygotowania pudełek z przedmiotami i włączenia urządzeń.
Pracując nad koordynacją wzrokowo-ruchową i obserwując własne ruchy, robot uczy się przewidywać, które z nich mają największe szanse zakończyć się sukcesem w konkretnej sytuacji.
Pojawiają się inteligentne reakcje, takie jak korygowanie ruchów w czasie rzeczywistym. Maszyna zaczyna rozróżniać obiekty małe od dużych, miękkie od twardych, itp.
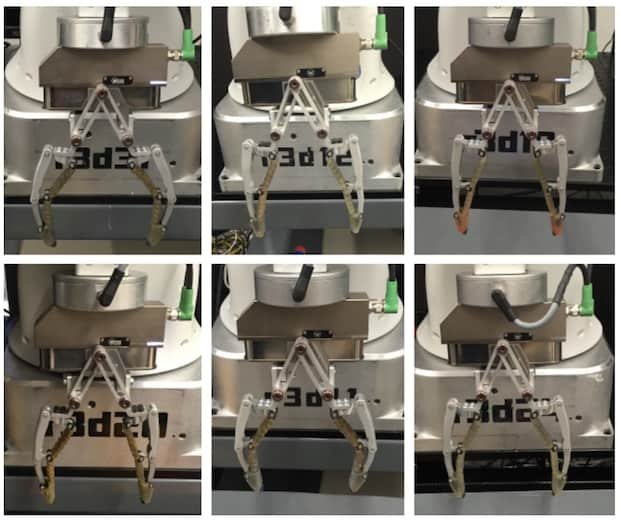
Różnice pomiędzy chwytakami robotów po 800 tysiącach prób.
Po setkach tysięcy prób, kształty chwytaków zaczęły różnić się między sobą. Wynika to z faktu, że oświetlenie lub umieszczenie kamer również nieznacznie się różnią.
Badania wynalazców nad taką adaptacją mogą w przyszłości oznaczać lepsze przystosowanie robotów do różnorodnych warunków i środowisk.
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.






















Trwa ładowanie komentarzy...