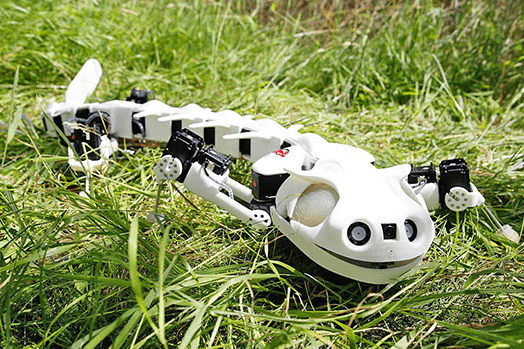
Pleurobot, stworzony przez wynalazców z EPFL, przypomina salamandrę nie tylko z wyglądu. Twórcy robota dołożyli starań, żeby jego sposób poruszania się, stopnie swobody i zakres ruchów były dokładnie takie same jak u zwierzęcia.
Fascynacja tymi płazami wynika m.in. z tego, że są one wielomodalne, czyli potrafią poruszać się na lądzie i w wodzie.
Co więcej, salamandra pozbawiona głowy idzie, gdy jej rdzeń kręgowy jest stymulowany. Kiedy stymulacja wzrasta, chód zmienia się w ruchy wykonywane podczas pływania.
Roboty zazwyczaj zużywają bardzo dużo energii na „myślenie” o tym, jak prawidłowo iść. Przykład salamandry pokazuje, że odpowiednio zaprojektowana struktura urządzenia może wziąć całą odpowiedzialność za sposób poruszania się.
Udział mózgu lub jego robotycznego odpowiednika jest zbędny.
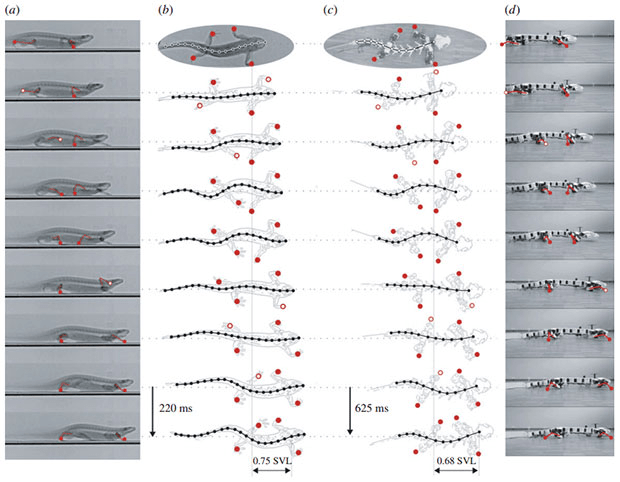
Aby osiągnąć efekt jak najbardziej zbliżony do prawdziwych ruchów salamandry, twórcy Pleurobota wykorzystali m.in. rentgenokinematografię i skalowanie dynamiczne.
Urządzenie jest prawie 9 razy większe od płaza, ponieważ rozmiary 27 silników nie pozwoliły na dalej posuniętą miniaturyzację.
Symulacja komputerowa nie wystarcza. Testy w praktyce są niezbędne, aby upewnić się, że robot w środowisku zewnętrznym konsekwentnie porusza się w ten sam sposób. Ważna jest precyzja, jeśli chodzi o wywierane siły i rozkład masy. Pleurobot odniósł tu sukces.
Porównanie ruchów salamandry i Pleurobota.
Twórcy urządzenia nie ustają w doskonaleniu go. Ma ono otrzymać m.in. palce u nóg. W planach są też rozwiązania bardziej neurobiologiczne niż kinematyczne, które mogłyby znaleźć zastosowanie w protezach dla ludzi. Inną oczywistą dziedziną, w której może się przydać robot wielomodalny, są akcje ratunkowe po kataklizmach.
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.























Trwa ładowanie komentarzy...