Jak zapewne pamiętasz z poprzedniej części kursu, zmiana wartości poszczególnych elementów, które znajdują się dookoła NE555, wpływa na jego działanie. Realizując ćwiczenia, będziemy korzystać z różnych (czasami dziwnych) wartości rezystorów i kondensatorów, aby uzyskać pożądane przez nas zachowanie NE555. Wartości tych nie wzięliśmy „z kosmosu”, nie musieliśmy też zgadywać – wszystko zostało obliczone.
Na początku skupmy się na budowie układów, a do obliczeń wrócimy po testach.
Czujnik przeszkód na NE555
Ten projekt ma na celu zaprezentowanie NE555 w swoim typowym zastosowaniu. Jego rolą będzie generowanie sygnału sterującego pracą diody IR. W jednej z poprzednich części kursu korzystaliśmy ze scalonego odbiornika podczerwieni TSOP do budowy testera pilotów RTV. Tym razem poradzimy sobie bez pilota, bo sami zbudujemy również nadajnik podczerwieni.
No dobrze, ale co to ma wspólnego z tytułowym czujnikiem przeszkód? Dioda sterowana przez nasz układ będzie świeciła cały czas w podczerwieni – nie będzie jednak świeciła światłem ciągłym. Będzie to sygnał modulowany częstotliwością 36 kHz, czyli taką, która jest wykrywana przez nasz TSOP.
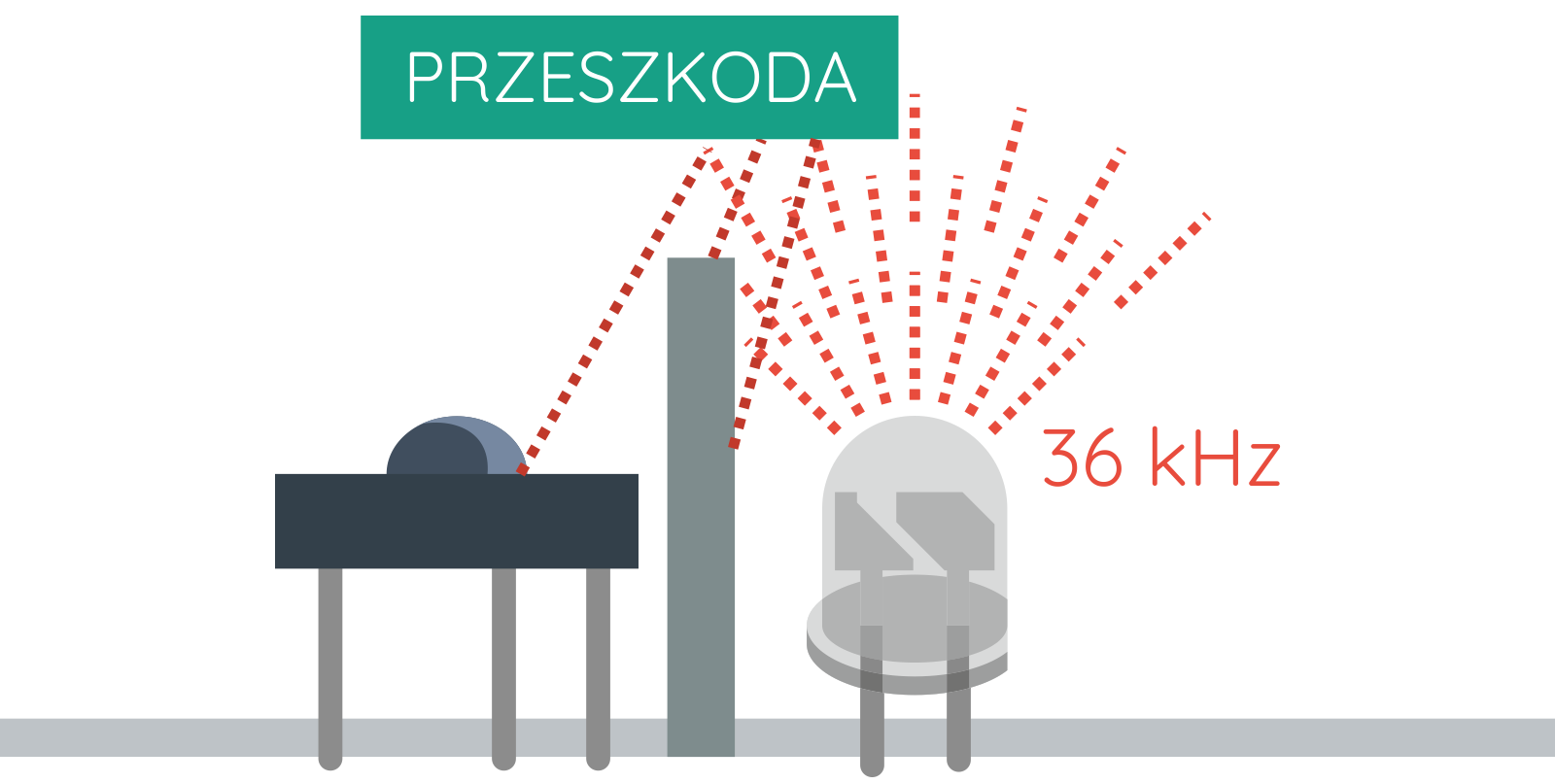
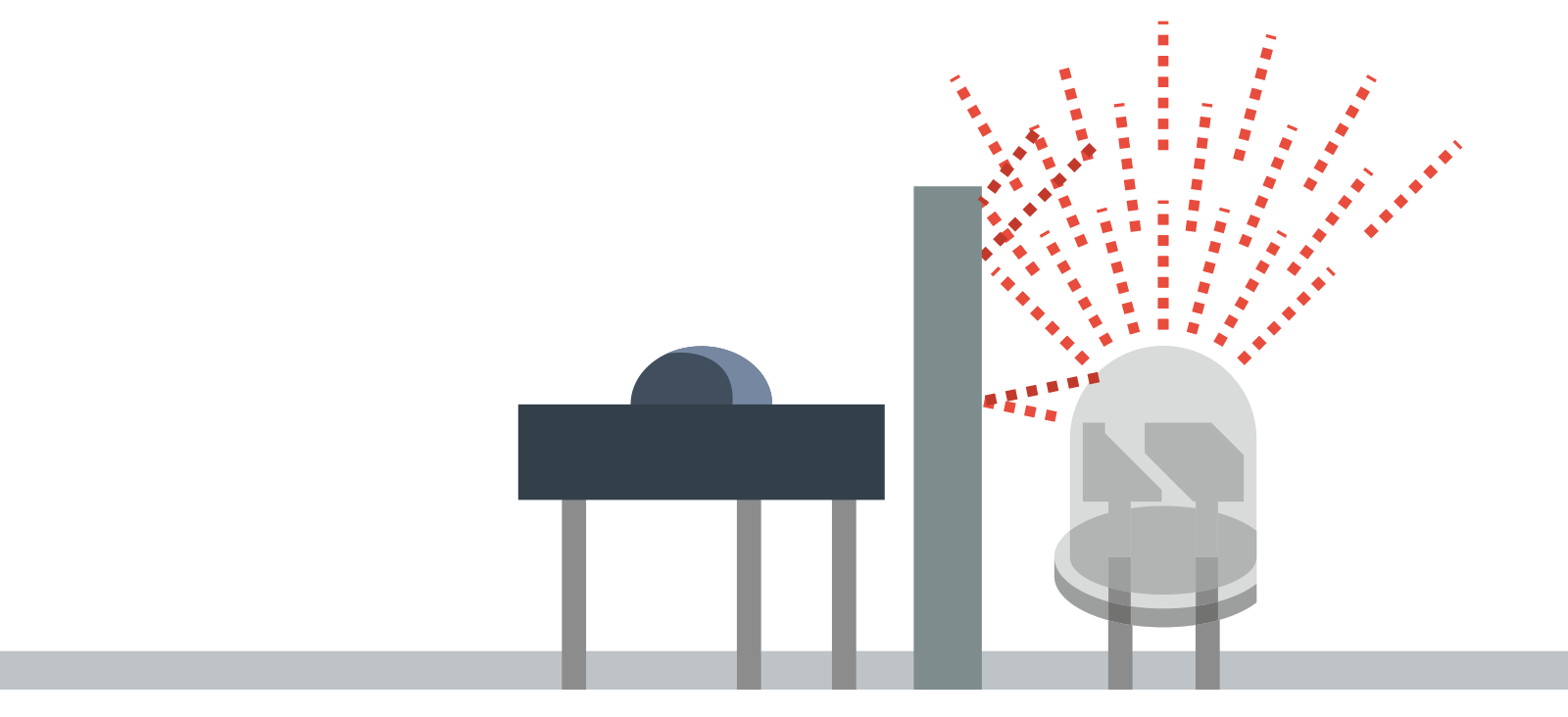
Ustawimy więc obok siebie TSOP i diodę IR. Jeśli przed tą parą pojawi się przeszkoda, to światło emitowane przez diodę odbije się od obiektu i trafi do odbiornika – dzięki temu będziemy mogli wykryć przeszkodę. Zbudujemy więc prawdziwy czujnik przeszkód! Takie rozwiązania można spotkać w gotowych, komercyjnych urządzeniach.
Zasada działania czujnika odległości działającego w podczerwieni
Powyższa ilustracja przedstawia jedynie ideę działania takiego czujnika. W rzeczywistości jego pole widzenia będzie trochę inne. Sprawdzimy to jednak w praktyce, wtedy wyjaśni się też, czym jest ta szara ściana między nadajnikiem a odbiornikiem.
Schemat jest dość rozbudowany, jednak najważniejsze, że wszystkie użyte tutaj elementy znamy już z poprzednich części kursu. Teraz zajmiemy się wykorzystaniem zdobytej wiedzy w praktyce – zanim przejdziemy do montażu, warto zwrócić uwagę na kilka spraw, które zostały opisane pod schematem.
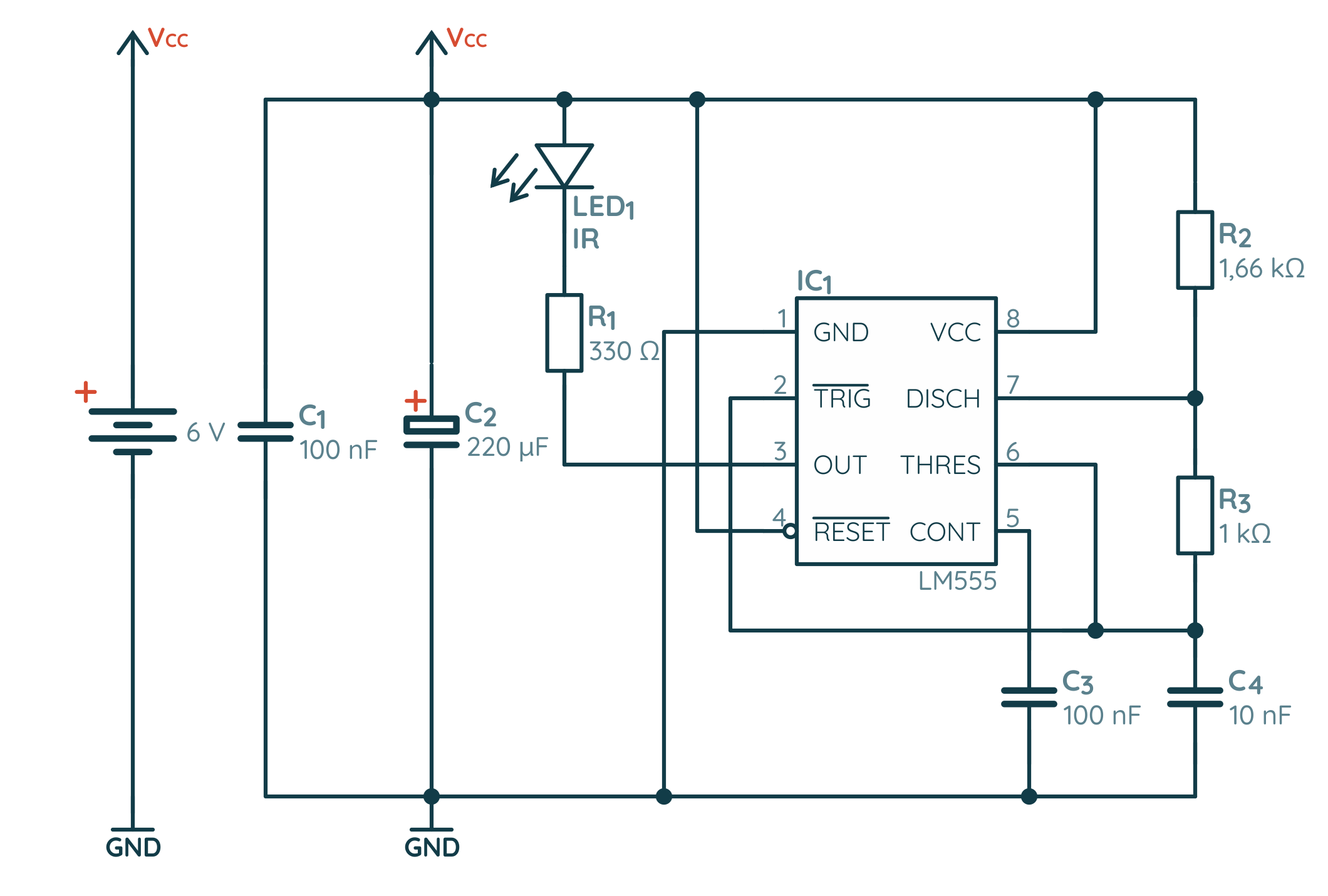
Schemat ideowy czujnika odległości na bazie NE555 – nadajnik
Czasami, gdy schematy są stosunkowo duże i rozbudowane, dzieli się je na kilka mniejszych części. Mogą to być wyraźnie oddzielone bloki w ramach jednego pliku lub zupełnie osobne schematy. W tym przypadku, aby pokazać Ci taką sytuację, podzieliliśmy nasz czujnik na dwa osobne schematy (jeden z nich przedstawia nadajnik, a drugi odbiornik). W praktyce wiele to nie zmienia – zmontujemy całość i tak na jednej płytce stykowej.
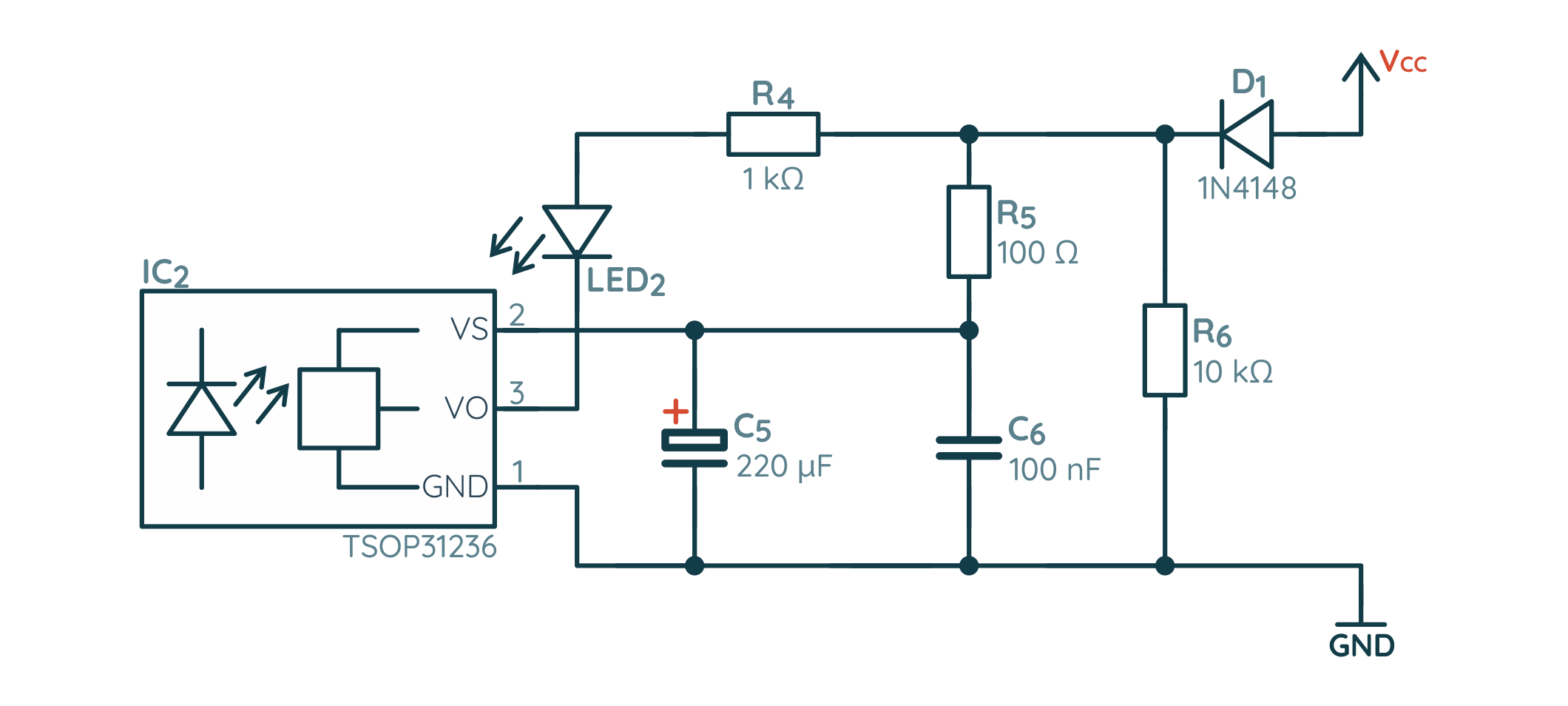
Schemat ideowy czujnika odległości na bazie NE555 – odbiornik
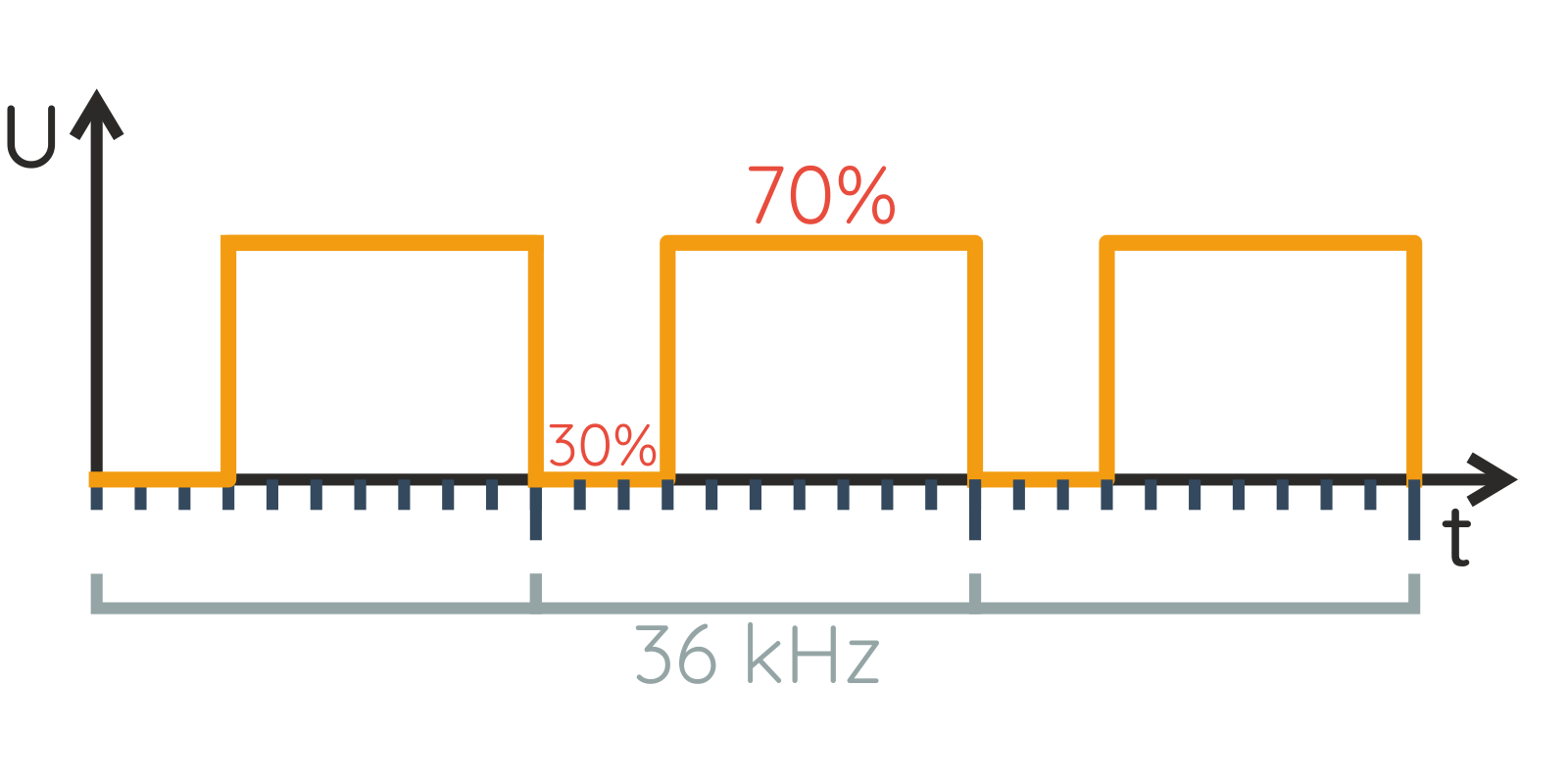
Kondensatory C1 i C2 filtrują zasilanie dla NE555. Rezystor R1 ogranicza prąd diody nadawczej IR do około 13 mA. Mało, ale do pierwszych testów wystarczy. Elementy R2, R3 i C4 zostały dobrane tak, aby układ NE555 generował sygnał o częstotliwości około 36 kHz i wypełnieniu około 70%.
Oznacza to, że dioda, włączona anodą do dodatniego bieguna zasilania, migać będzie z wypełnieniem jedynie 30% (dioda będzie świecić przez 30% czasu, a przez 70% będzie wyłączona).
Dioda IR będzie świeciła jedynie przez 30% czasu
Odbiornik TSOP31236 używany był już do testowania pilotów RTV. Tutaj został użyty w ten sam sposób. Różnica polega na tym, że dioda LED2, dołączona do jego wyjścia, będzie świecić stale po zbliżeniu przeszkody, a to dlatego, że poprzednio korzystaliśmy z pilota, który sam z siebie generował krótkie impulsy podczerwieni rozdzielone stosunkowo długimi przerwami. Tym razem sygnał nadawany w podczerwieni będzie ciągły – tzn., że cały czas będziemy wysyłać impulsy o wypełnieniu 30%.
Co ważne, nie musimy się martwić o to, że nasz układ czasowy nie będzie generował dokładnej częstotliwości 36 kHz. Tak jak wspominaliśmy podczas poznawania TSOP-a, filtr zawarty w tym odbiorniku nie jest idealny i przepuszcza również sygnały o innych częstotliwościach.
Gotowe zestawy do kursów Forbota
Komplet elementów Gwarancja pomocy Wysyłka w 24h
Chcesz zrozumieć elektronikę? Zamów zestaw elementów do wykonania wszystkich ćwiczeń z kursu i przejdź do praktyki!
Masz już zestaw? Zarejestruj go wykorzystując dołączony do niego kod. Szczegóły »
Montaż i uruchomienie czujnika przeszkód
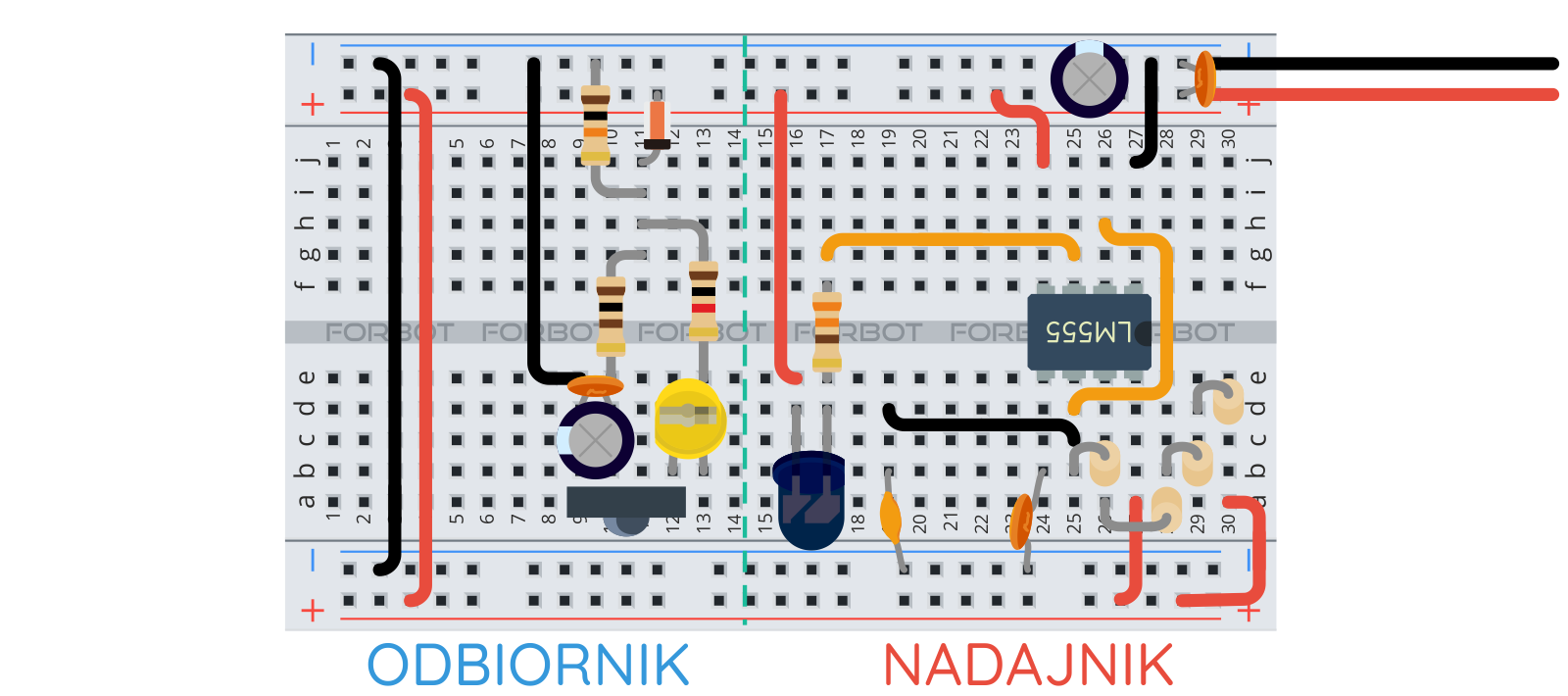
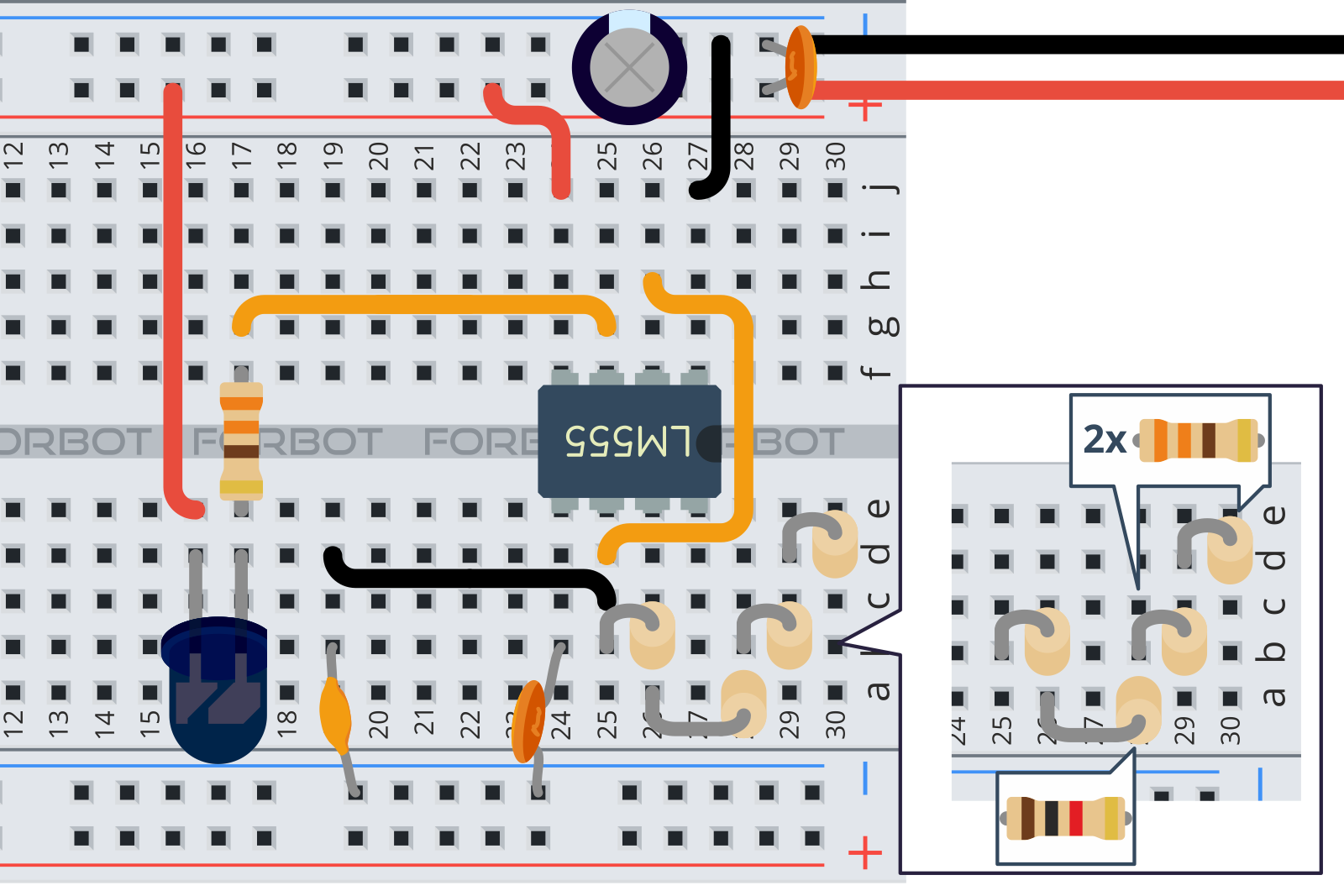
Układ można z powodzeniem zmontować nawet na niewielkiej płytce stykowej. Poniżej widoczna jest przykładowa realizacja tego urządzenia. Oczywiście możesz spróbować samodzielnie zbudować taki układ, ale ponieważ całość wygląda dość zawile, poniżej dokładnie opisaliśmy ten proces.
Układ na płytce stykowej
Projekt ten wyraźnie dzieli się na dwa bloki:
generator na NE555, który steruje diodą IR,
odbiornik podczerwieni na bazie czujnika TSOP.
Zacznijmy od budowy generatora na bazie NE555.
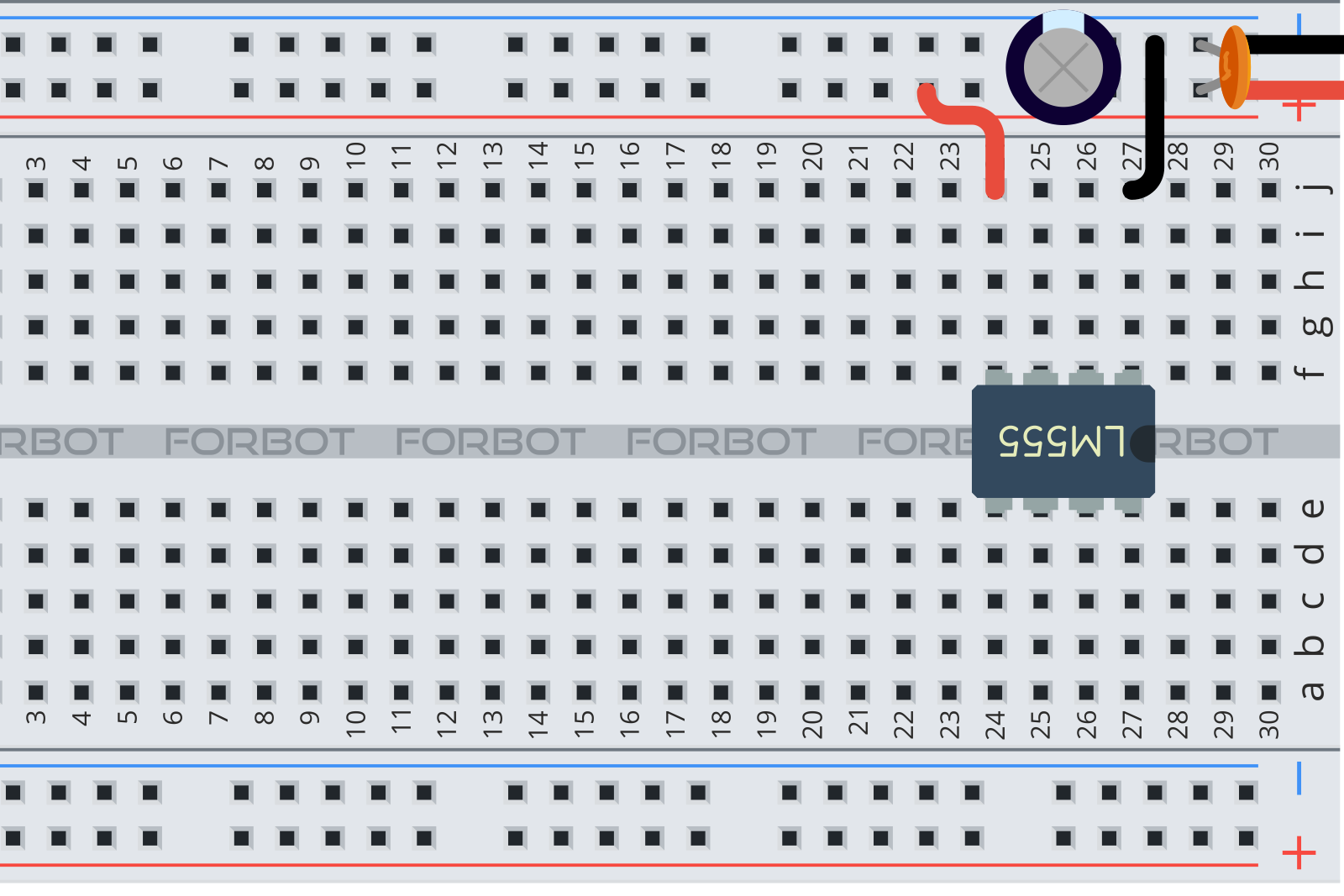
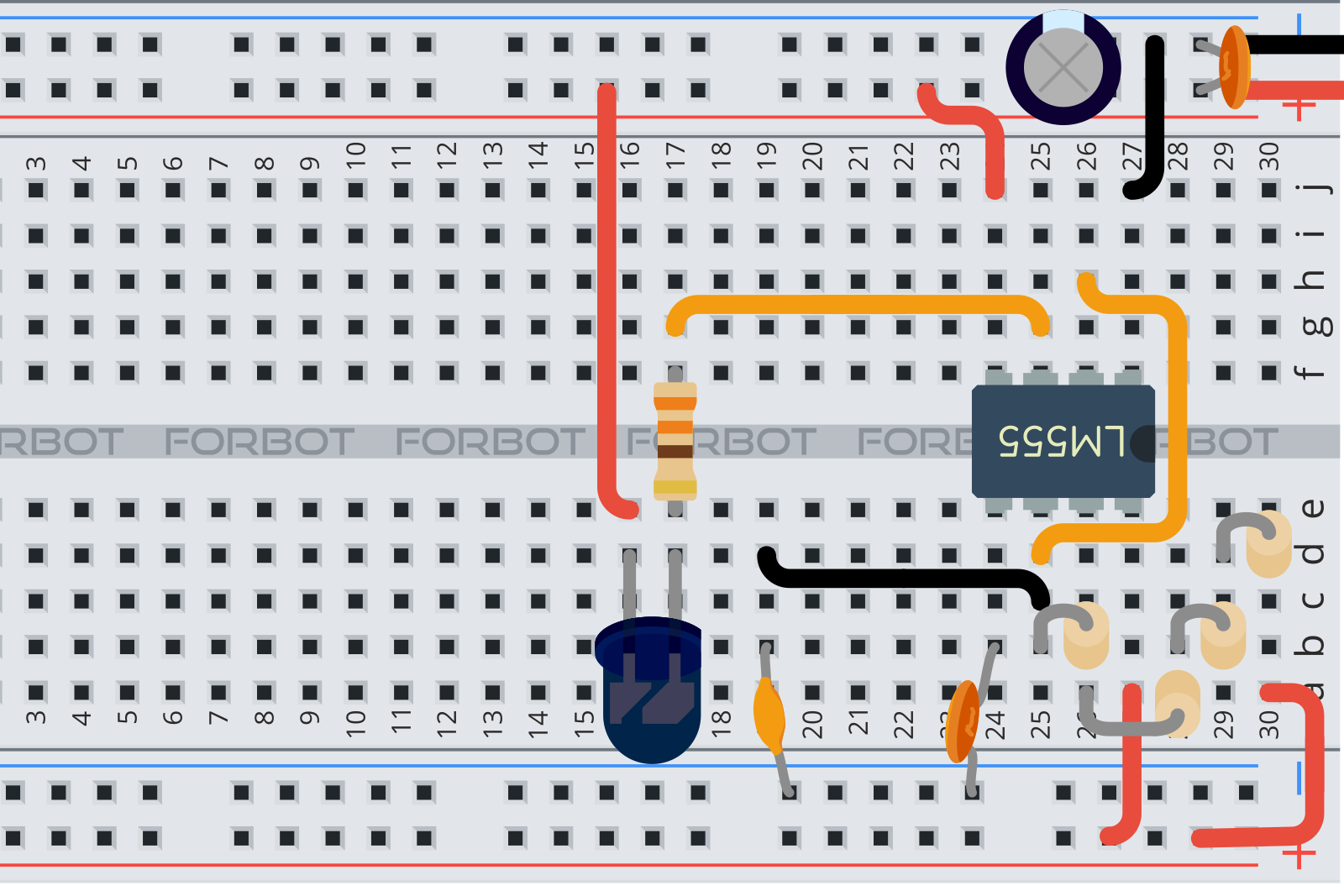
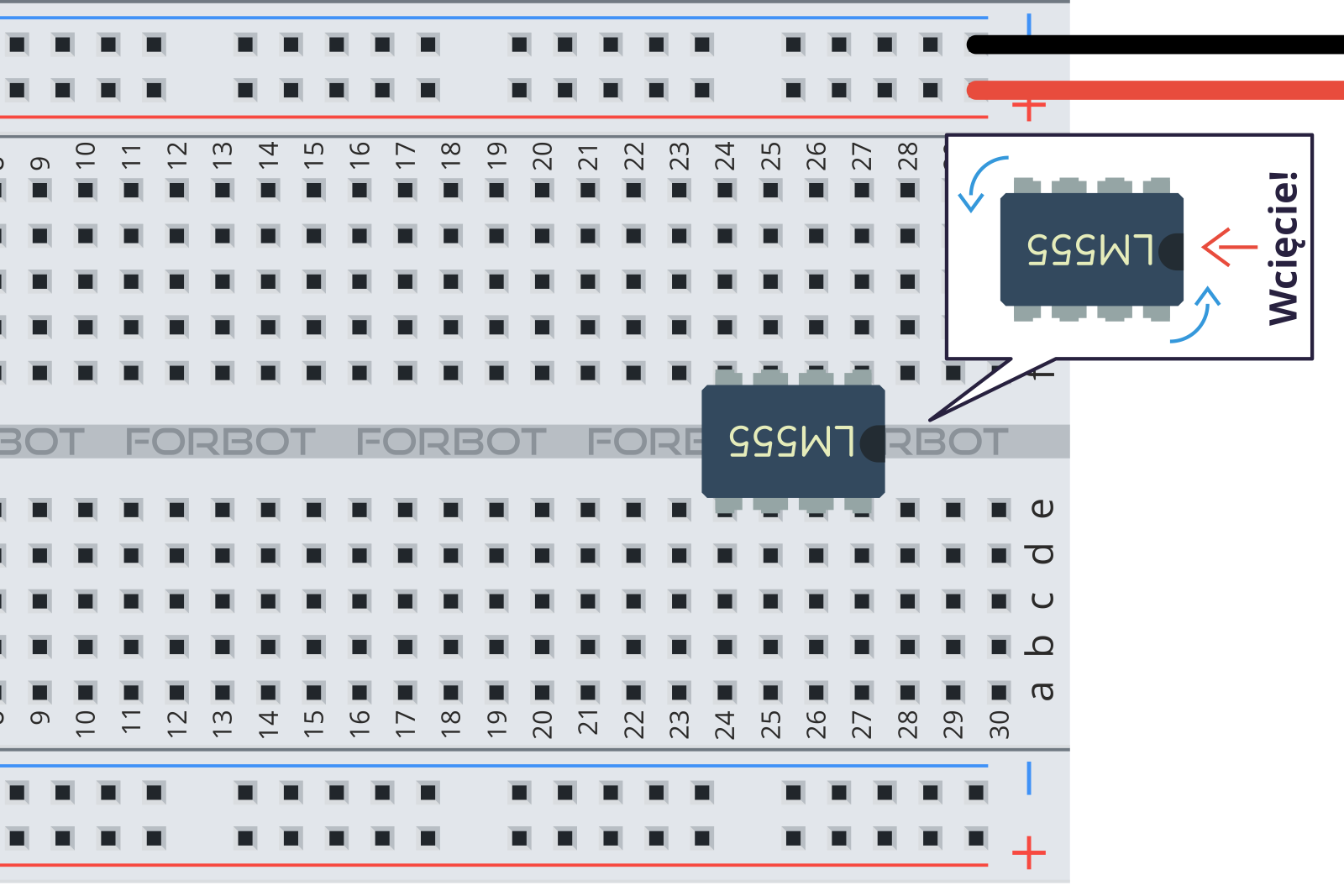
Krok 1. Montujemy dwa kondensatory filtrujące zasilanie (C1 i C2). Oczywiście jest to również pora na włożenie w płytkę układu NE555. Tym razem nie na środku, tylko bliżej prawej strony, bo wtedy uda się nam lepiej wpasować cały układ na tak małą płytkę – koniecznie zwróć też uwagę na wcięcie!
Krok 2. Łączymy pierwszą nóżkę NE555 z masą, a czwartą z dodatnią szyną zasilania.
Krok 1: kondensatory i NE555
Krok 2: podłączenie zasilania NE555
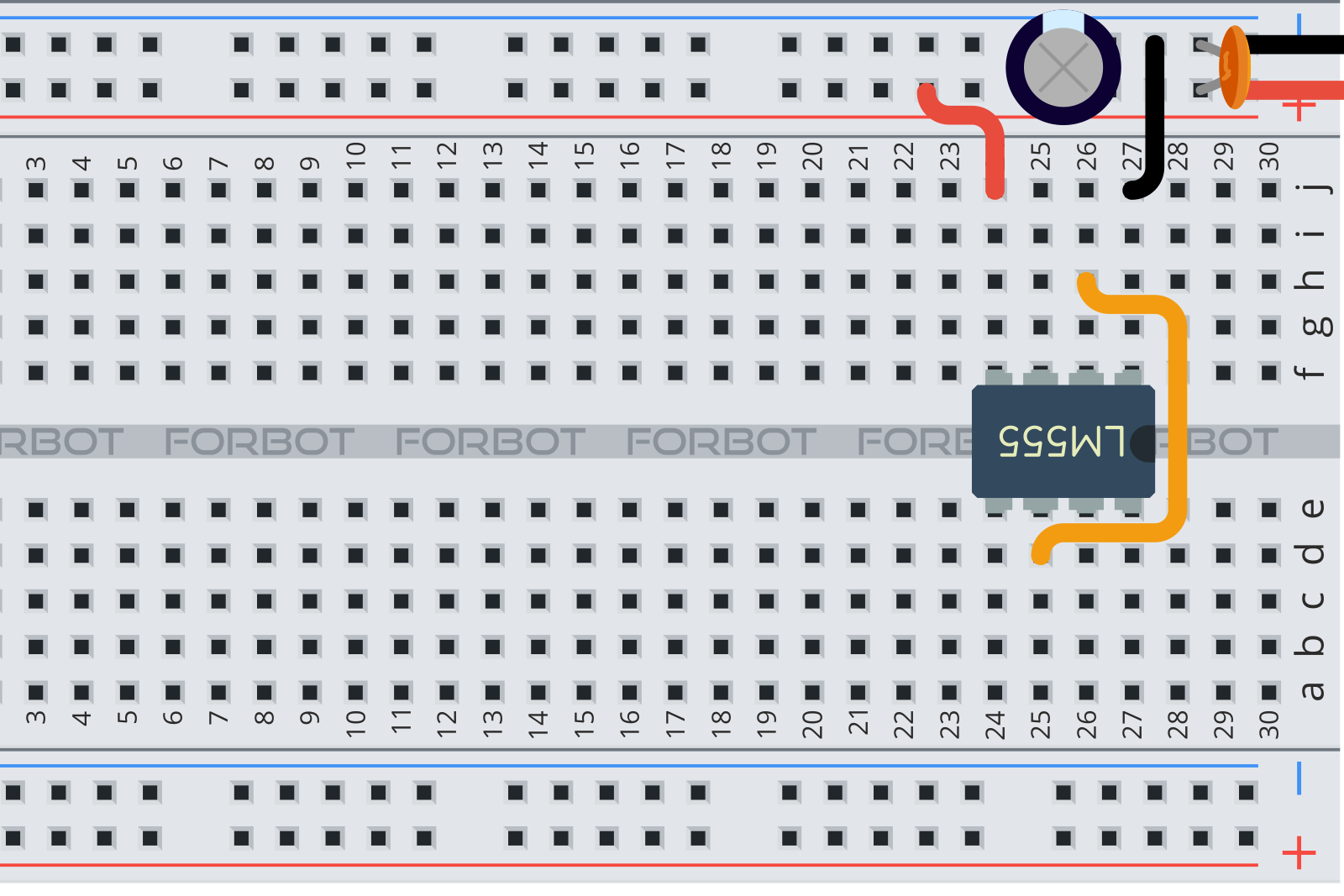
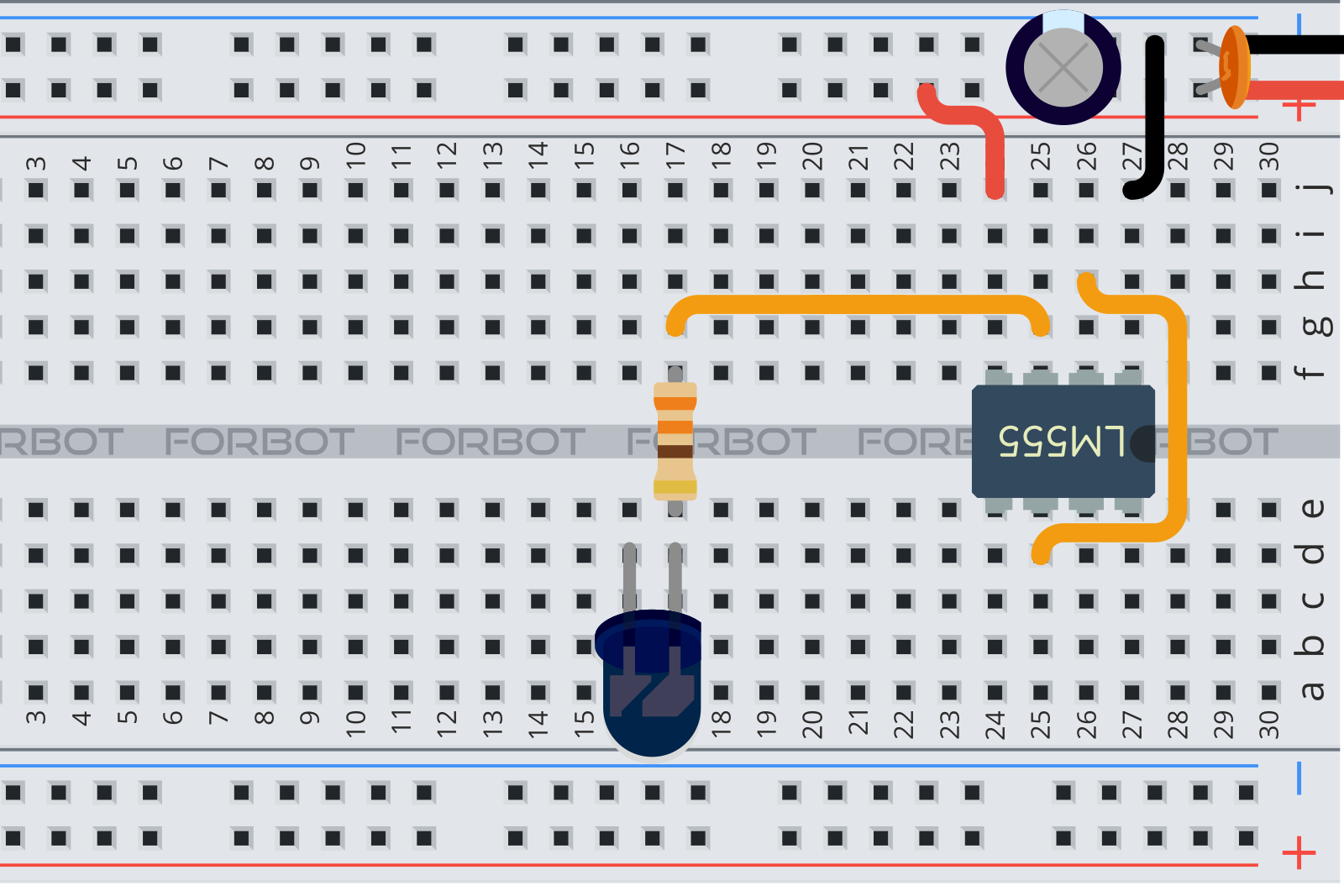
Krok 3. Łączymy drugą nóżkę z szóstą. Krok 4. Do trzeciego wyprowadzenia przez R1 (330 R) podłączamy diodę nadawczą (IR).
W Twoim zestawie do kursu może znajdować się inna dioda IR (o średnicy 3 lub 5 mm oraz z ciemną lub jasną soczewką). Nie wpływa to jednak negatywnie na działanie układu.
Krok 3: połączenie nóżek NE555
Krok 4: podłączenie diody IR
Krok 5. Podłączamy zasilanie do diody. Łączymy piątą nóżkę NE555 z masą przez C3. Krok 6. Dodajemy kondensator C4 oraz rezystor R3. Łączymy je odpowiednio z nóżkami nr 6 i 7.
Krok 5: zasilanie diody i kondensator
Krok 6: kolejne elementy i połączenia
Krok 7. Pora na dodanie rezystora R2 o wartości 1,66 k. Dla ułatwienia od razu podpowiadamy, że nie ma takiego rezystora i trzeba go uzyskać samodzielnie, łącząc kilka innych. Jak widać na zdjęciu, konieczne są 3 rezystory połączone szeregowo. Jakie wartości wykorzystać? To już zadanie dla Ciebie!
Krok 8. Podłączamy zasilanie do ósmej nóżki układu NE555. Łączymy również wyprowadzenie naszego nowego rezystora 1,66 k z dodatnią szyną zasilania. Część nadawcza jest gotowa!
Krok 7: rezystor 1,66 k
Krok 8: kolejne połączenia
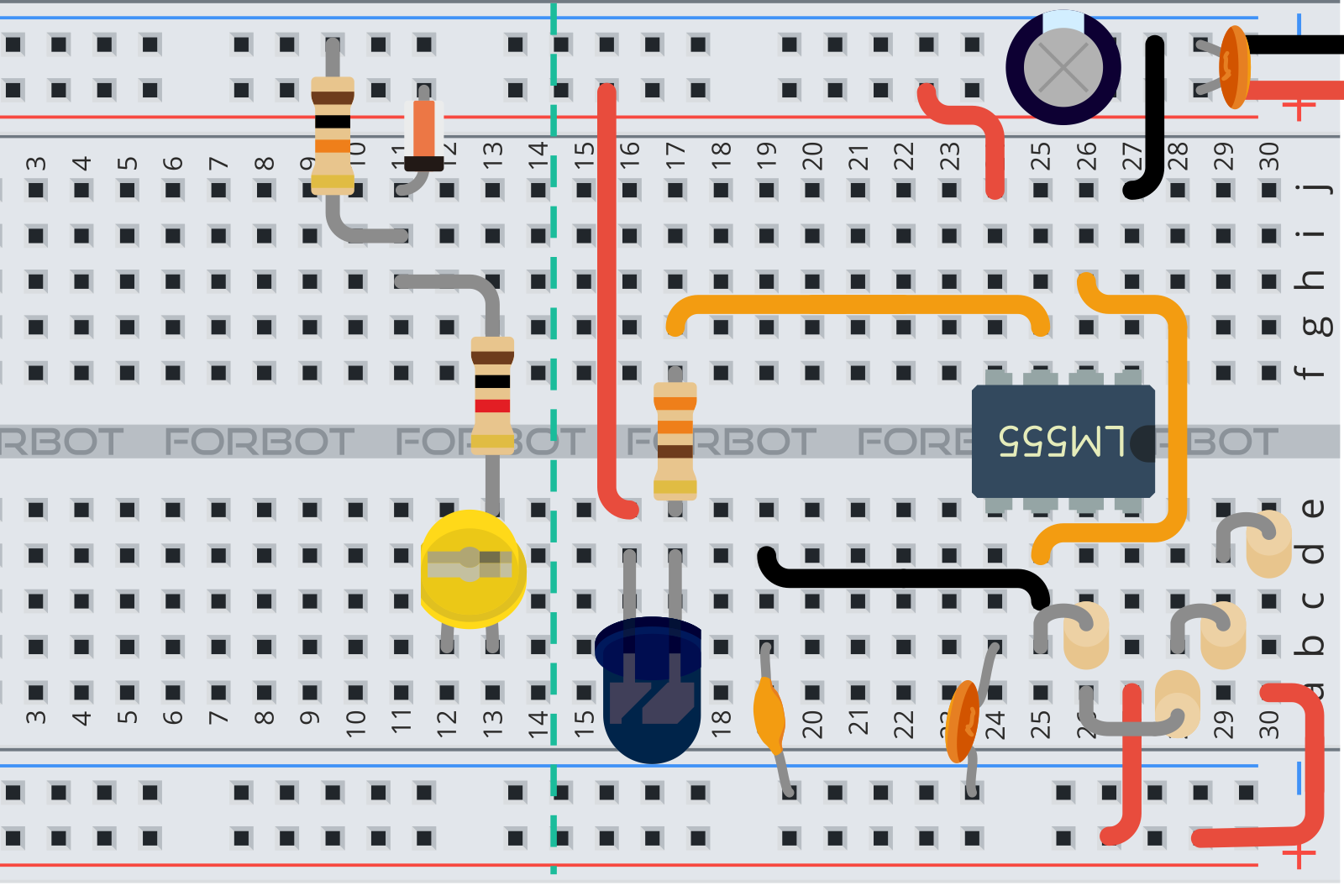
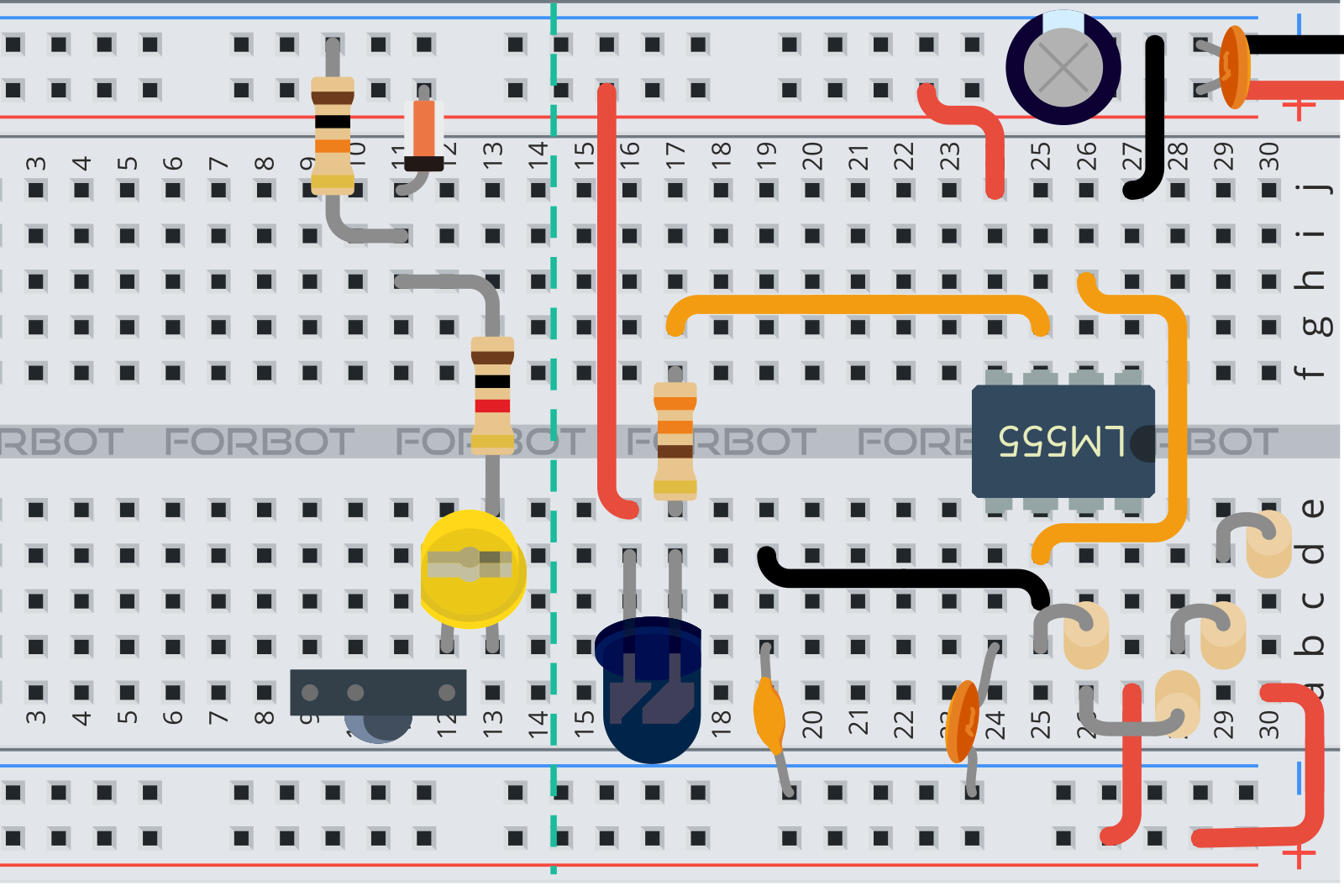
Krok 9. Pora na odbiornik. Podobne zadanie realizowaliśmy już w poprzednich częściach kursu, dlatego tutaj trochę przyspieszymy. W lewym górnym rogu płytki układamy połączenie D1, R6 – przez te elementy oraz rezystor R5 będziemy zasilać nasz odbiornik. Obok diody nadawczej szykujemy miejsce na TSOP-a. Aby czujnik działał poprawnie, musi on znaleźć się obok diody. Montujemy również diodę świecącą wraz z rezystorem R4.
Całość w praktyce może wyglądać następująco (plątanina przewodów jest zupełnie normalna).
Czujnik przeszkód w praktyce
Działanie czujnika przeszkód w praktyce
Po zmontowaniu całości można włączyć zasilanie i sprawdzić, czy układ prawidłowo reaguje na zbliżanie obiektów. Nasz prototyp reagował na zbliżenie ręki z odległości około 7 cm. Sprawdź, jak wygląda to w Twoim przypadku. W celu zwiększenia zasięgu czujnika można zwiększać prąd diody IR – możesz tutaj poeksperymentować samodzielnie.
Zbyt wysoki prąd może uszkodzić diodę nadawczą (IR)!
Co, gdy układ nie działa poprawnie?
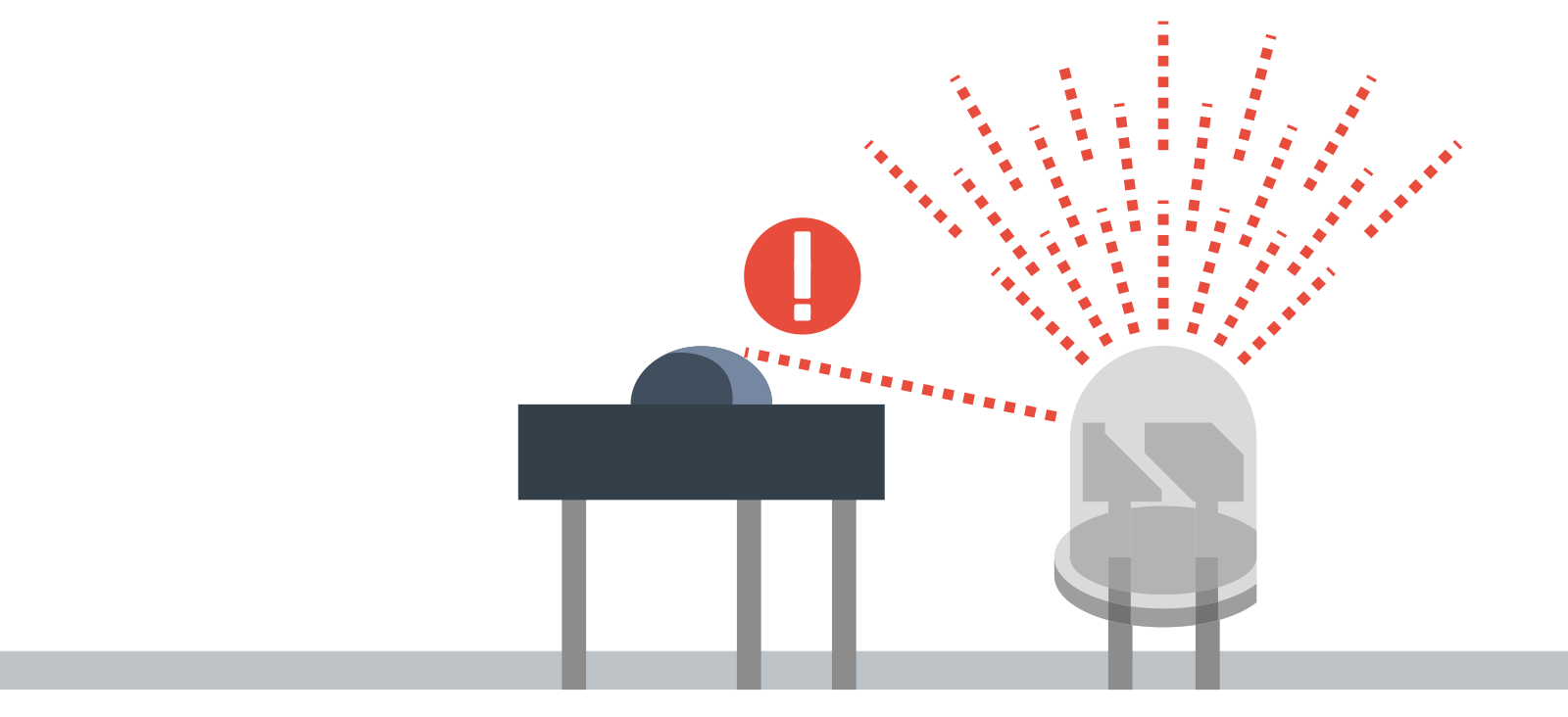
Może się zdarzyć tak, że np. czujnik ciągle sygnalizuje obecność przeszkody. Dlaczego tak się dzieje? Jeśli ustawimy na płytce równolegle diodę nadawczą i odbiornik IR, może się wydawać, że światło między nimi powinno być przesyłane jedynie poprzez odbicie od obiektu z przodu. Przy większych prądach część promieniowania wydostanie się z boku diody i dotrze bezpośrednio do odbiornika.
Część światła z diody może wpadać prosto na odbiornik podczerwieni
Oczywiście takie zjawisko kompletnie zakłóci działanie czujnika, bo będzie on ciągle sygnalizował obecność przeszkody. Może być więc potrzebna dodatkowa przegroda (np. z kartonu), która była zaznaczona na wcześniejszych ilustracjach. Dodanie takiej ścianki zwiększy niezawodność czujnika.
Działanie czujnika z dodatkową przegrodą
Jeśli po zmontowaniu układu i włączeniu zasilania nic się nie dzieje, to należy sprawdzić osobno funkcjonowanie obu części. Do sprawdzenia odbiornika przyda się pilot od TV. Wciskanie przycisku na pilocie powinno uruchamiać diodę świecącą obok TSOP-a. Z kolei do sprawdzenia nadajnika najlepiej wykorzystać aparat cyfrowy (np. z telefonu). Jeśli skierujemy go na włączony układ, powinniśmy widzieć, że dioda IR świeci na fioletowo.
Czujnik przeszkód z przegrodą w praktyce
Jeżeli któryś z elementów systemu nie działa, to należy sprawdzić jeszcze raz wszystkie połączenia. Jeśli jednak TSOP odpowiednio reaguje na sygnał z pilota, dioda IR świeci, a czujnik nadal nie działa, to znak, że NE555 generuje sygnał o innej częstotliwości niż wymagane 36 kHz. Co wtedy? Jest duża szansa, że podczas montażu wykorzystałeś elementy o złej wartości – warto to sprawdzić.
Sterownik serwomechanizmów na NE555
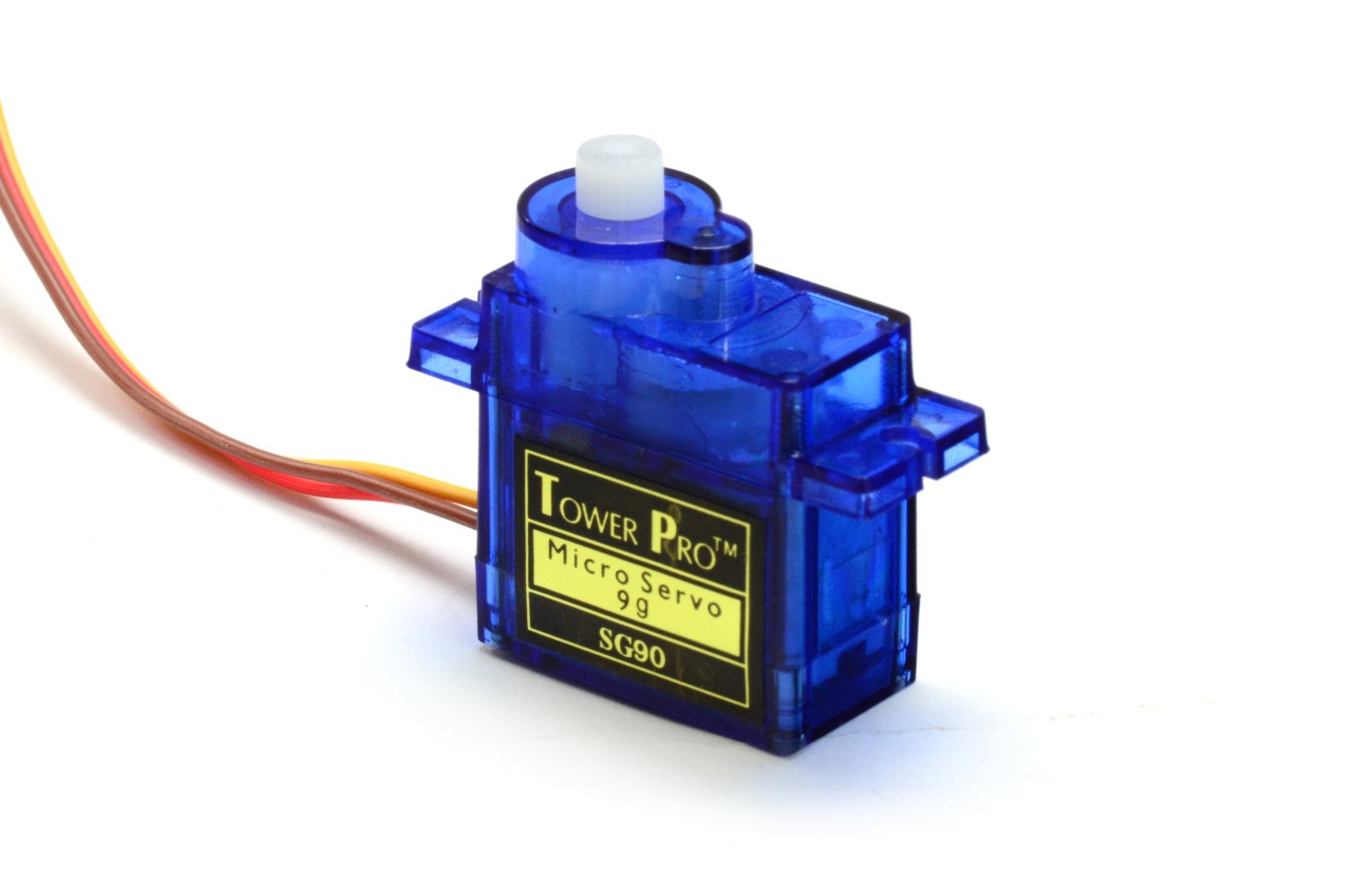
Tak jak wspominaliśmy już podczas omawiania sygnału PWM – serwomechanizm modelarski to układ zawierający silnik prądu stałego, przekładnię oraz wbudowany sterownik. Z jego obudowy wystaje oś, która może się obracać najczęściej tylko o pewien kąt (przeważnie około 180°).
Przykładowy serwomechanizm tzw. typu micro (ze względu na swoje niewielkie rozmiary)
Serwo jest stosunkowo delikatnym urządzeniem elektronicznym i mechanicznym, więc nie powinno się ręcznie przekręcać jego osi. Przy nieumiejętnym, zbyt mocnym przekręcaniu można je bardzo łatwo uszkodzić (np. łamiąc przy okazji koła zębate w jego wnętrzu).
Serwa wyposażone są w złącza z trzema przewodami:
pomarańczowy (lub biały/żółty) – sygnał sterujący,
Bardzo łatwo można podłączyć do tego wtyku przewody, które wykorzystujemy do budowy układów na płytkach stykowych. Nie trzeba kupować dedykowanych złączy ani obcinać oryginalnego wtyku.
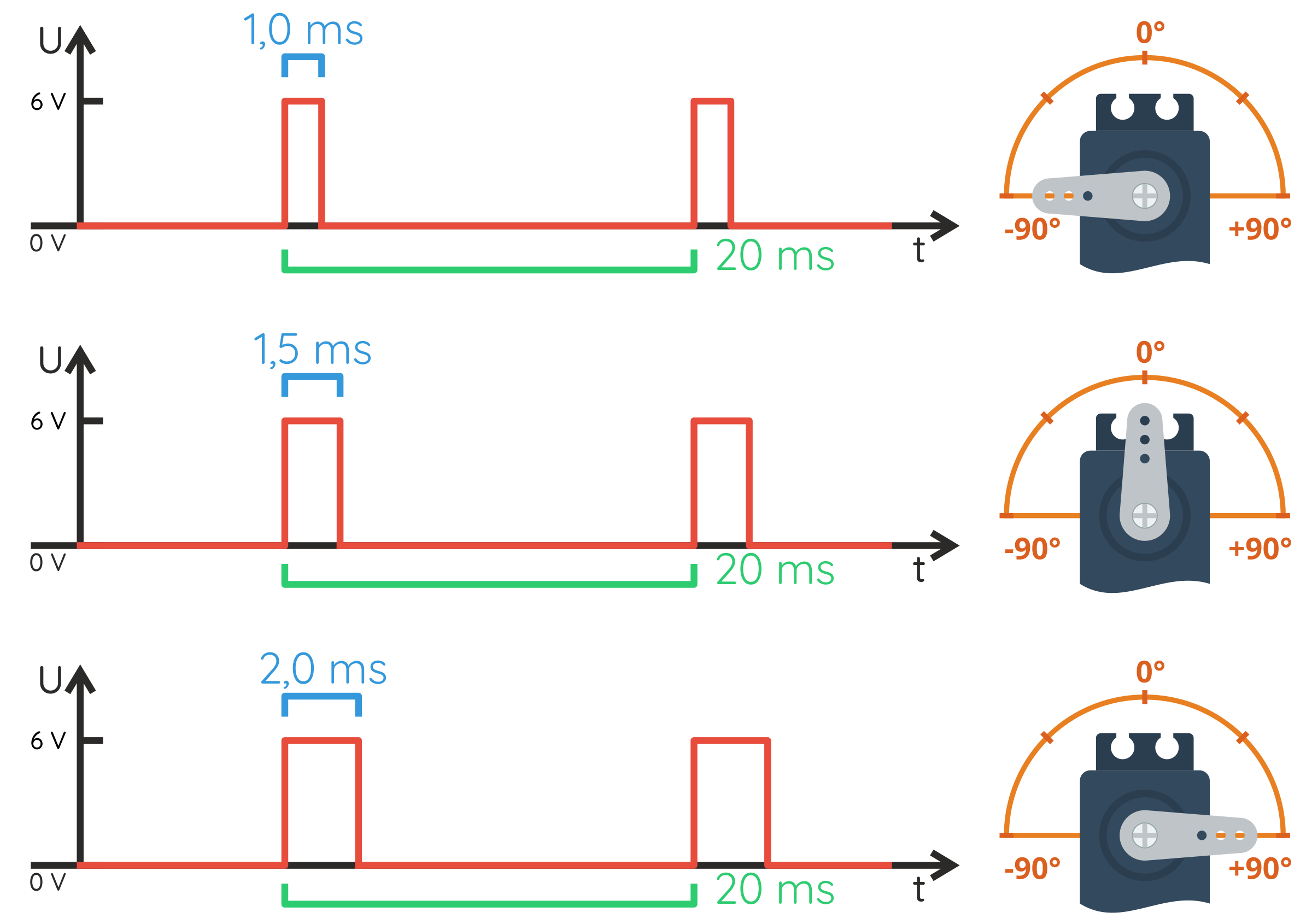
Dla przypomnienia: sterowanie obrotem tego elementu odbywa się poprzez zmianę szerokości impulsów, które cyklicznie się do niego przesyła – tak, mowa o PWM! Impulsy napięcia dodatniego są powtarzane co około 20 ms. Szerokość impulsu zawiera się w przedziale około 1–2 ms.
Zasada działania serwomechanizmu
W celu ustawienia serwa w pozycji środkowej należy podać mu sygnał o szerokości około 1,5 ms, a jego wydłużanie lub skracanie powoduje przekręcanie osi.
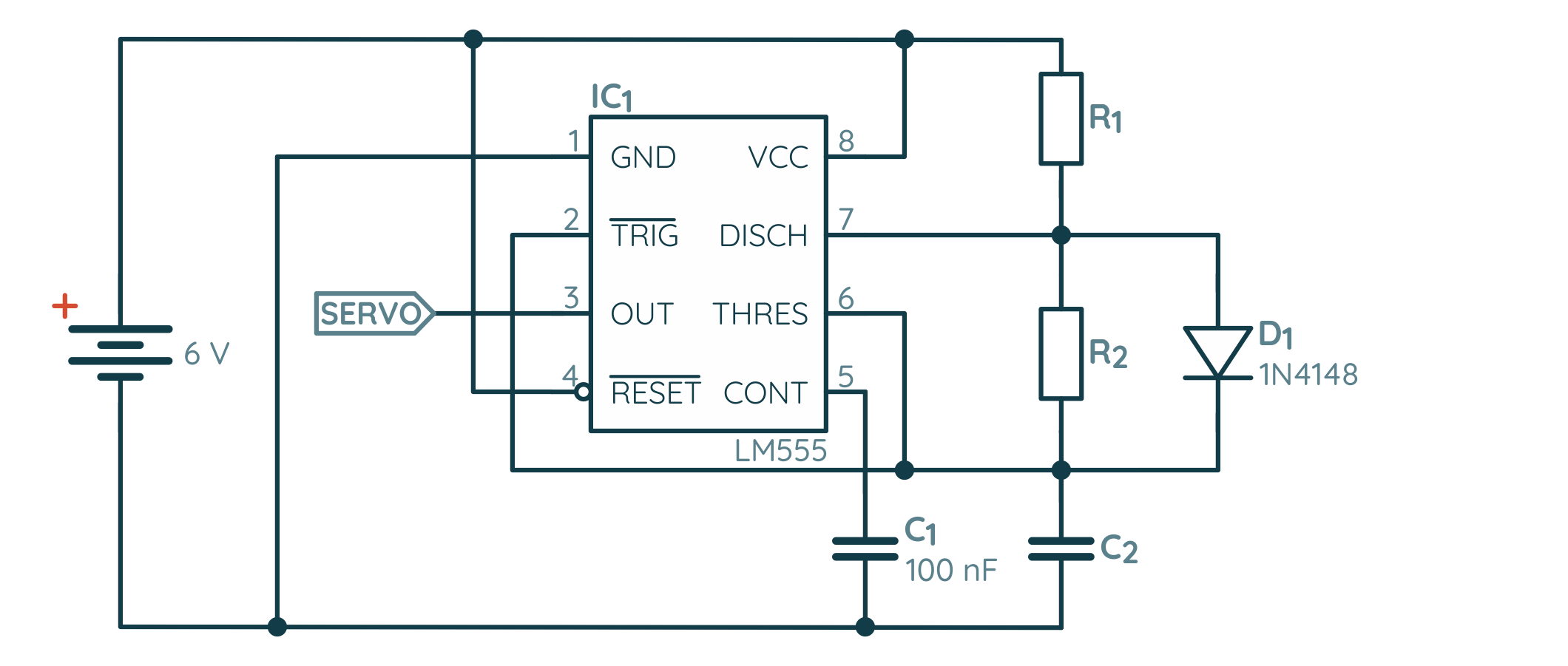
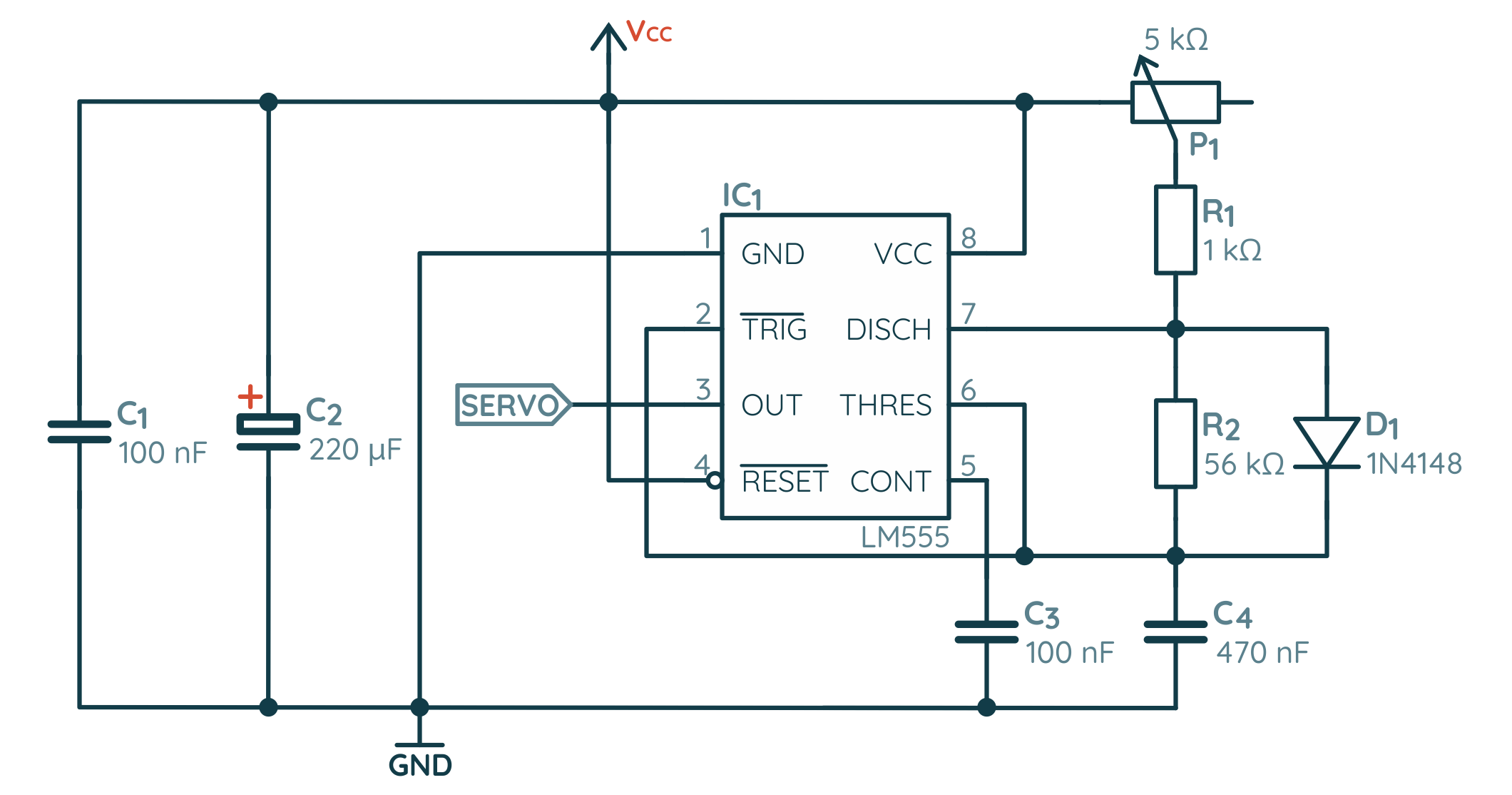
Schemat sterownika serwomechanizmów na NE555
Ten układ również jest oparty na NE555, lecz jego typowa aplikacja została poddana modyfikacjom. W typowej konfiguracji astabilnej za czas trwania stanu wysokiego odpowiada suma rezystancji R1 + R2, a za stan niski tylko R2. Podczas zmiany stanu wysokiego zmieniamy również czas stanu niskiego. Jest to pewna niedogodność w sytuacji, gdy stan niski powinien trwać zawsze tyle samo.
Zmodyfikowany schemat NE555 w konfiguracji astabilnej
Dodanie jednej diody 1N4148 powoduje rozdzielenie ról tych rezystorów: prąd ładujący kondensator C2 przepływa przez R1 i diodę D1. Dioda otwiera się, ponieważ rezystor R2 ma wartość dużo większą od R1 (będzie się na nim odkładało większe napięcie). Z kolei po zwarciu wewnętrznym tranzystorem wyprowadzenia 7 do masy dioda się zatyka i C2 rozładowuje się tylko przez R2.
Schemat ideowy kompletnego układu jest następujący:
Schemat sterownika serwomechanizmów na bazie NE555 – generator sygnału
Tak samo jak poprzednio – tutaj również podzieliliśmy go na dwa osobne bloki. Tym razem drugi blok jest bardzo prosty (to tylko podłączenie serwomechanizmu do zasilania i do sygnału opisanego jako SERVO, czyli w praktyce do trzeciej nóżki NE555.
Schemat sterownika serwomechanizmów na bazie NE555 – serwo z zasilaniem
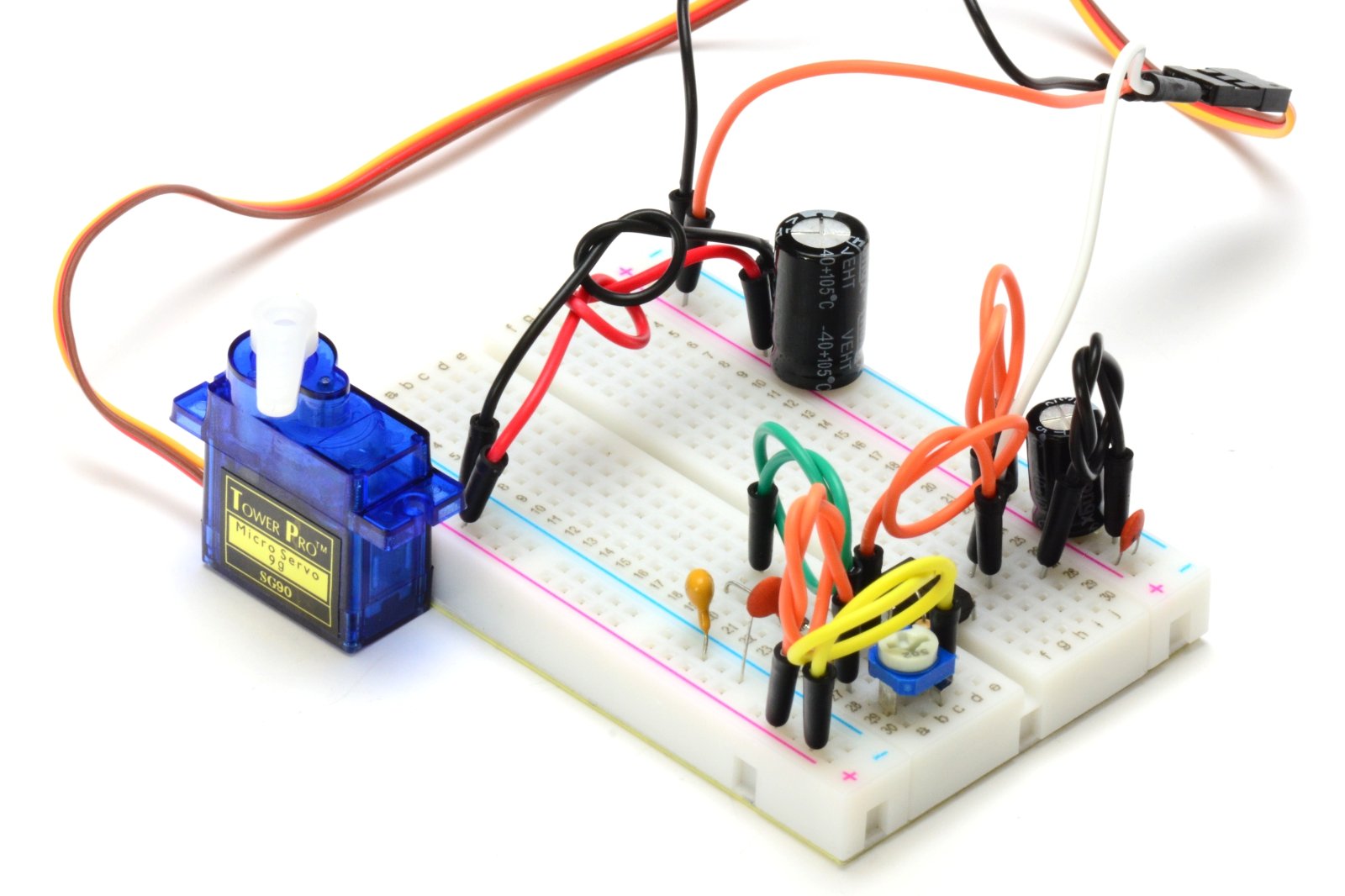
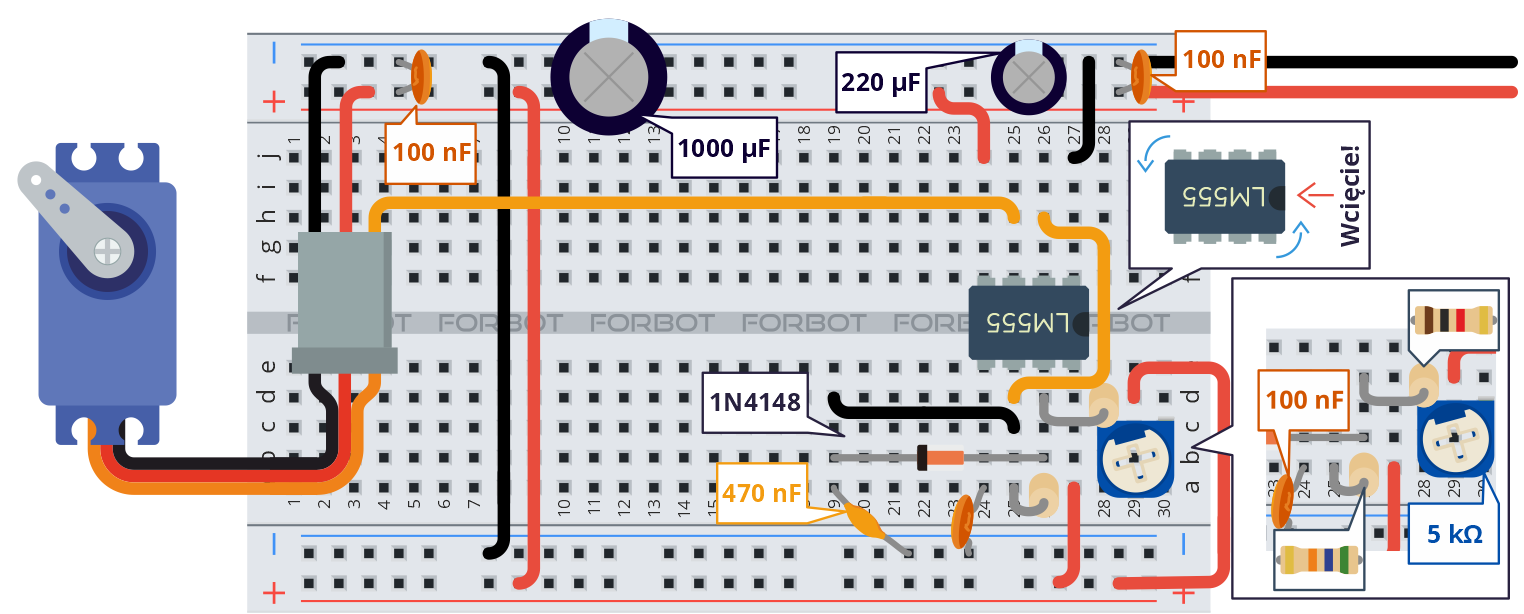
Oto przykładowa realizacja układu, a poniżej – tak jak poprzednio – znaleźć można dokładną instrukcję krok po kroku.
Przykładowa realizacja sterownika serwomechanizmów na NE555
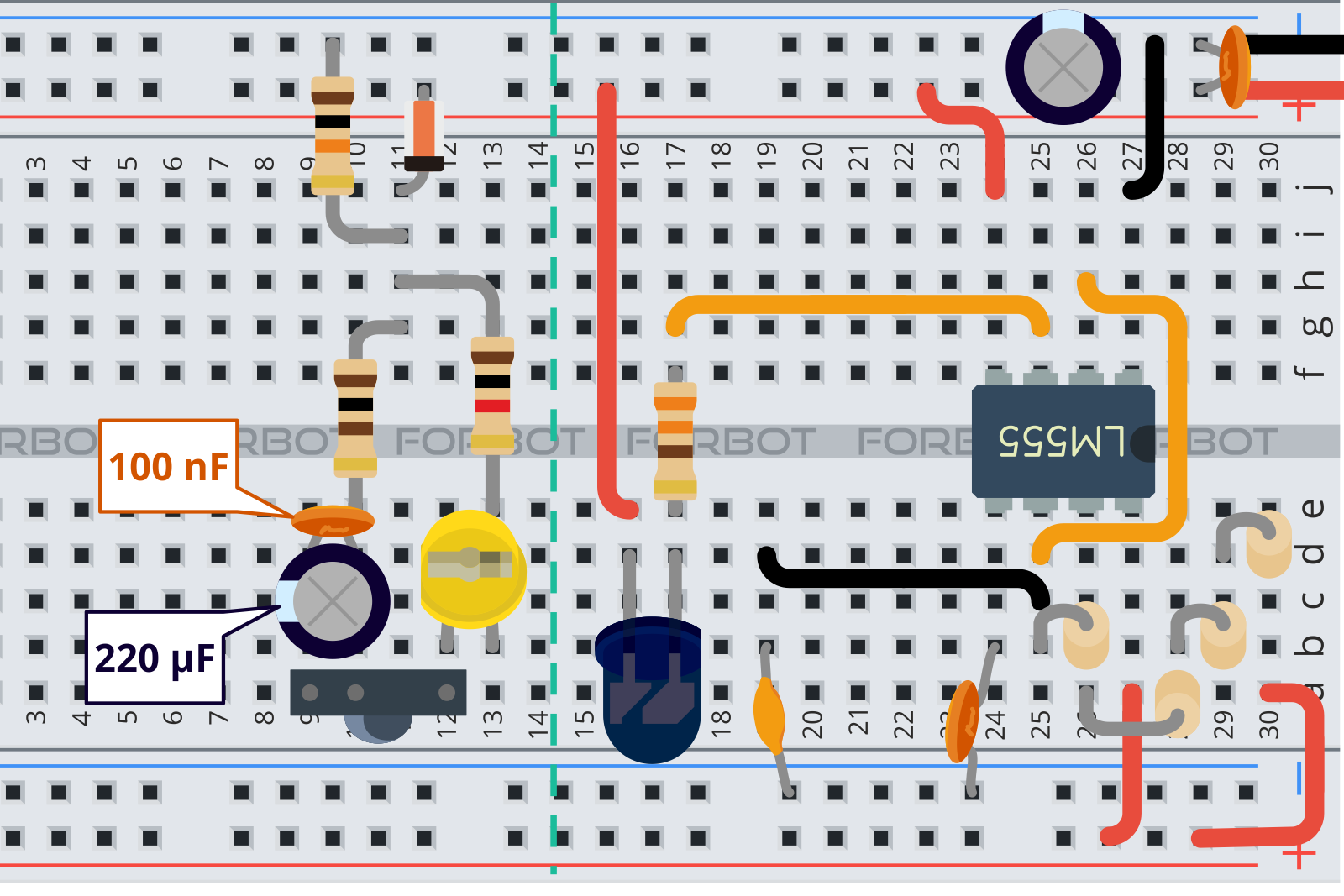
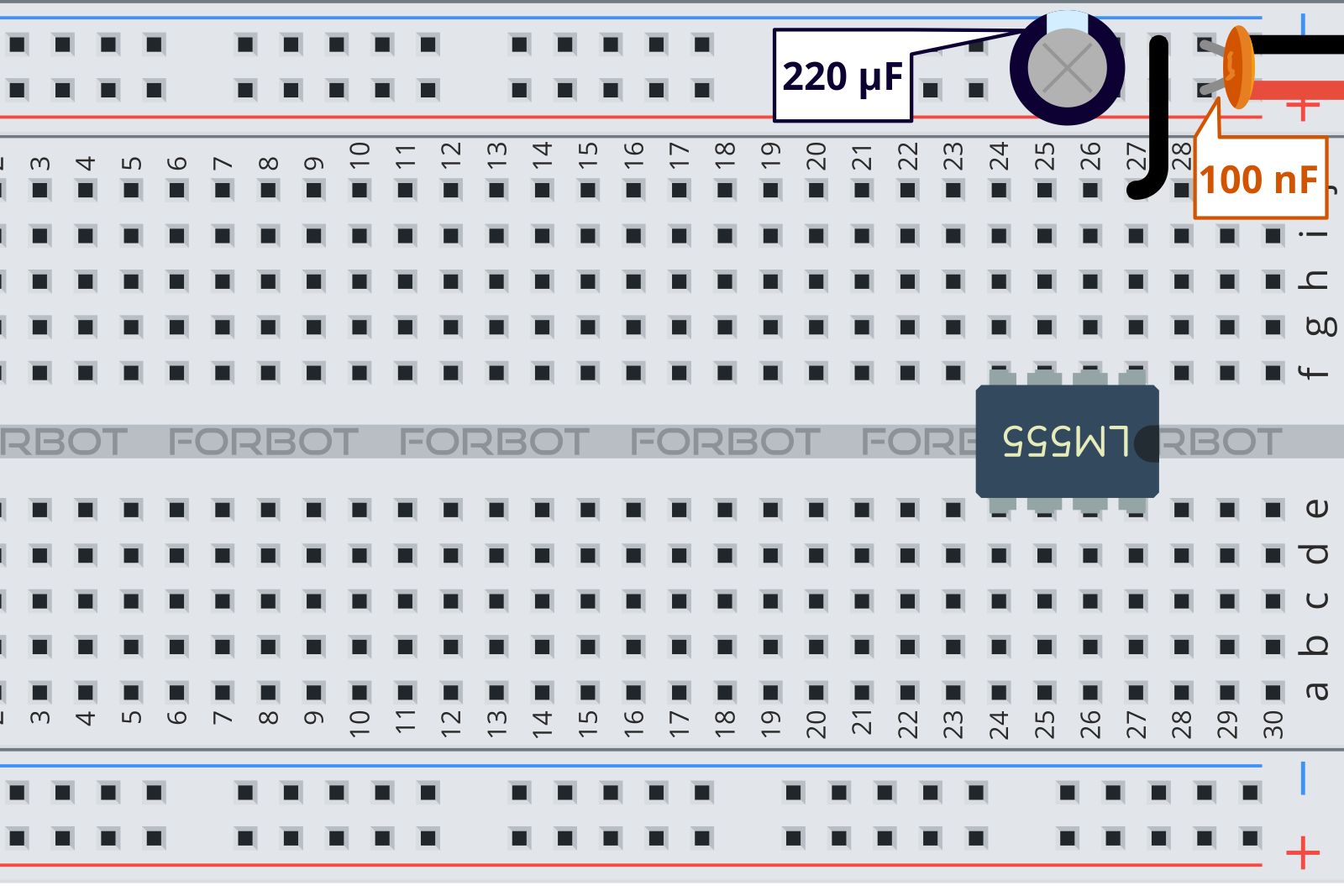
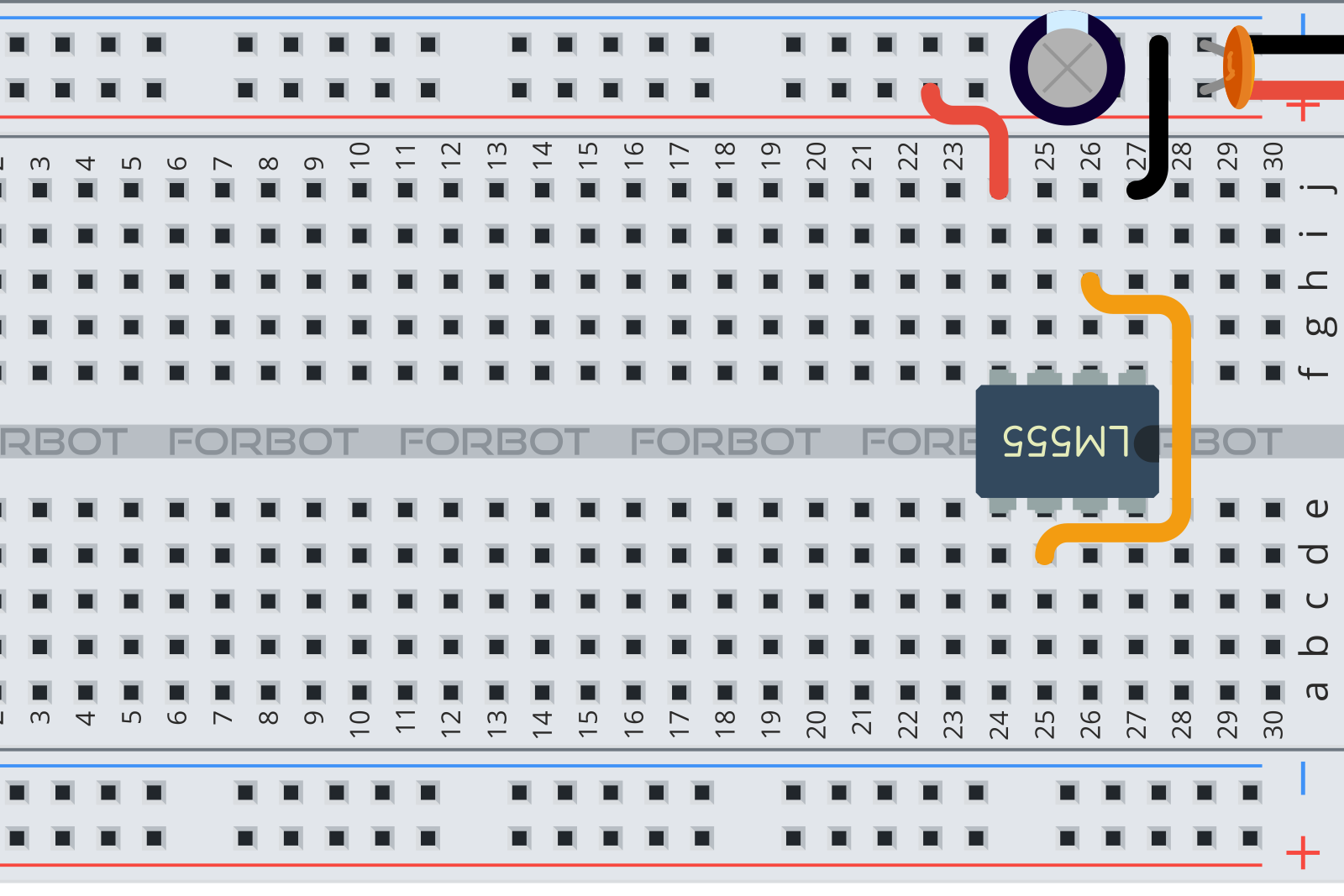
Krok 1. Montujemy NE555 (zwracając uwagę na wcięcie). Krok 2. Wstawiamy kondensator C1 (100 nF) oraz C2 (220 uF). Łączymy pierwszą nóżkę NE555 z masą.
Krok 1: pierwsze połączenie przy NE555
Krok 2: połączenia nóżek NE555
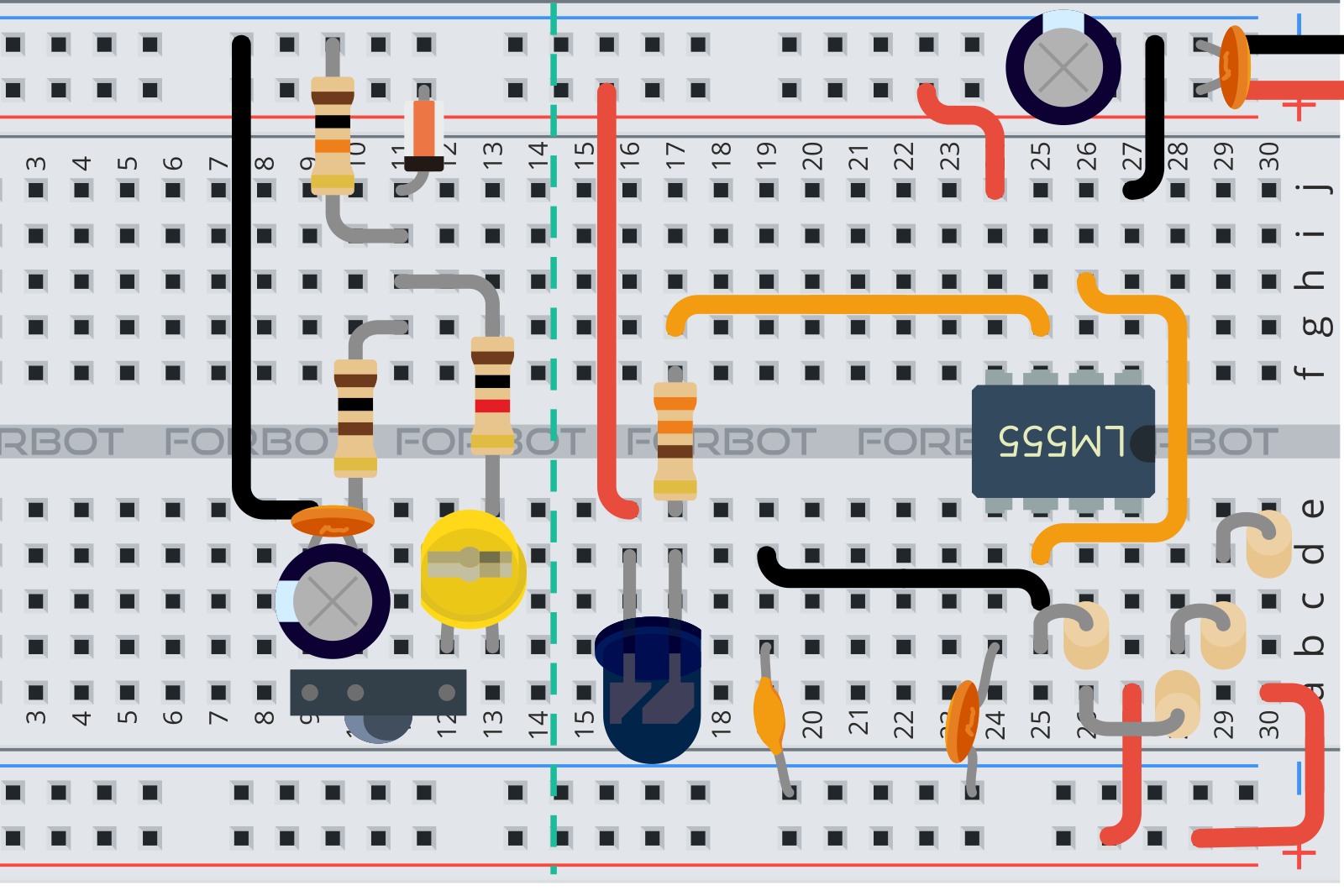
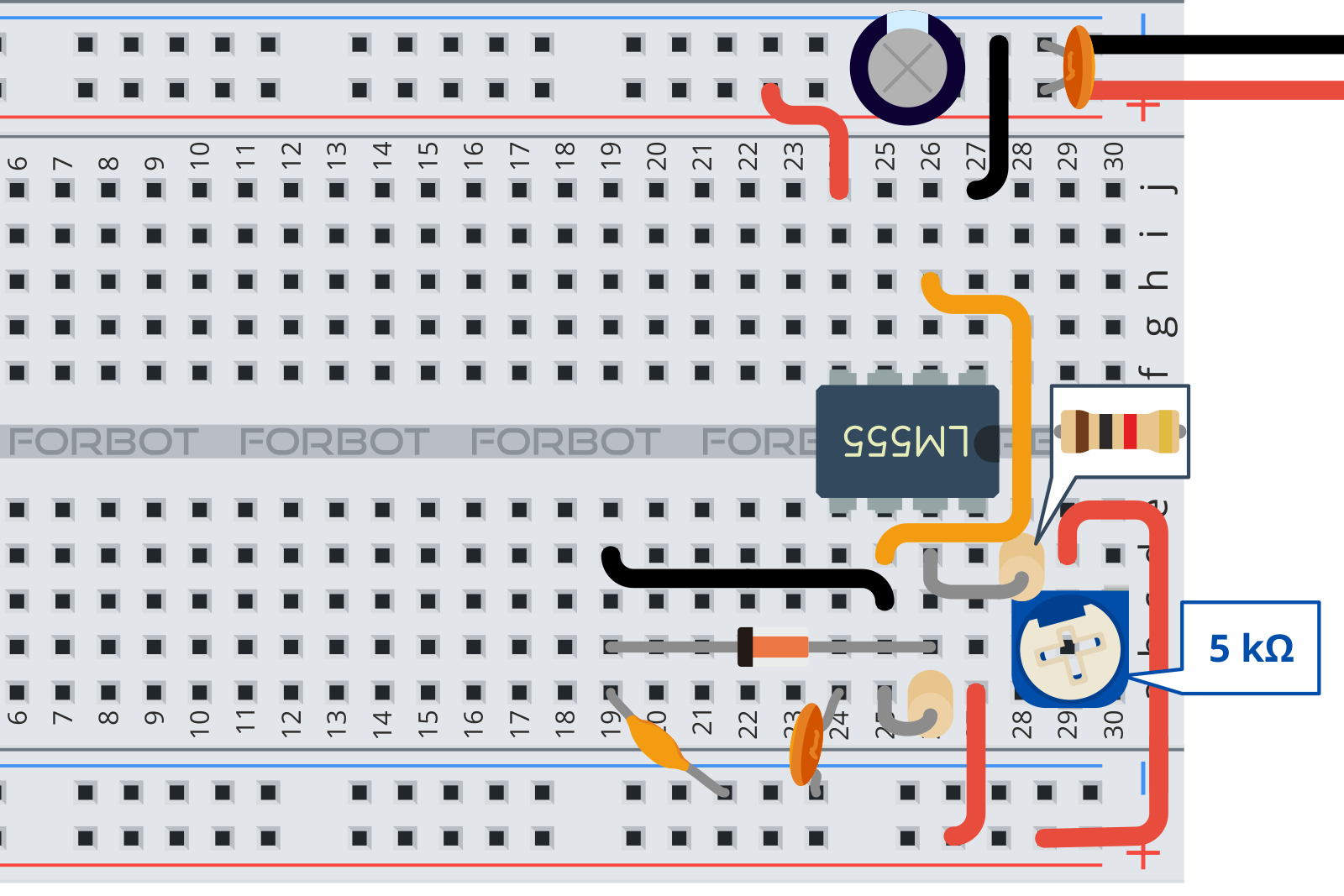
Krok 3. Łączymy drugą nóżkę układu z szóstą, a czwartą nóżkę z dodatnią szyną zasilania. Krok 4. Montujemy elementy znajdujące się w okolicy nóżki nr 6. Konkretnie jest to kondensator C4 o pojemności 470 nF. Dodatkowo widoczne tam są rezystor R2 (56 k) oraz dioda 1N4148.
Koniecznie zwróć uwagę na kierunek przewodzenia diody!
Krok 3: połączenie C4, R2 i diody 1N4148
Krok 4: podłączenie rezystora i potencjometru
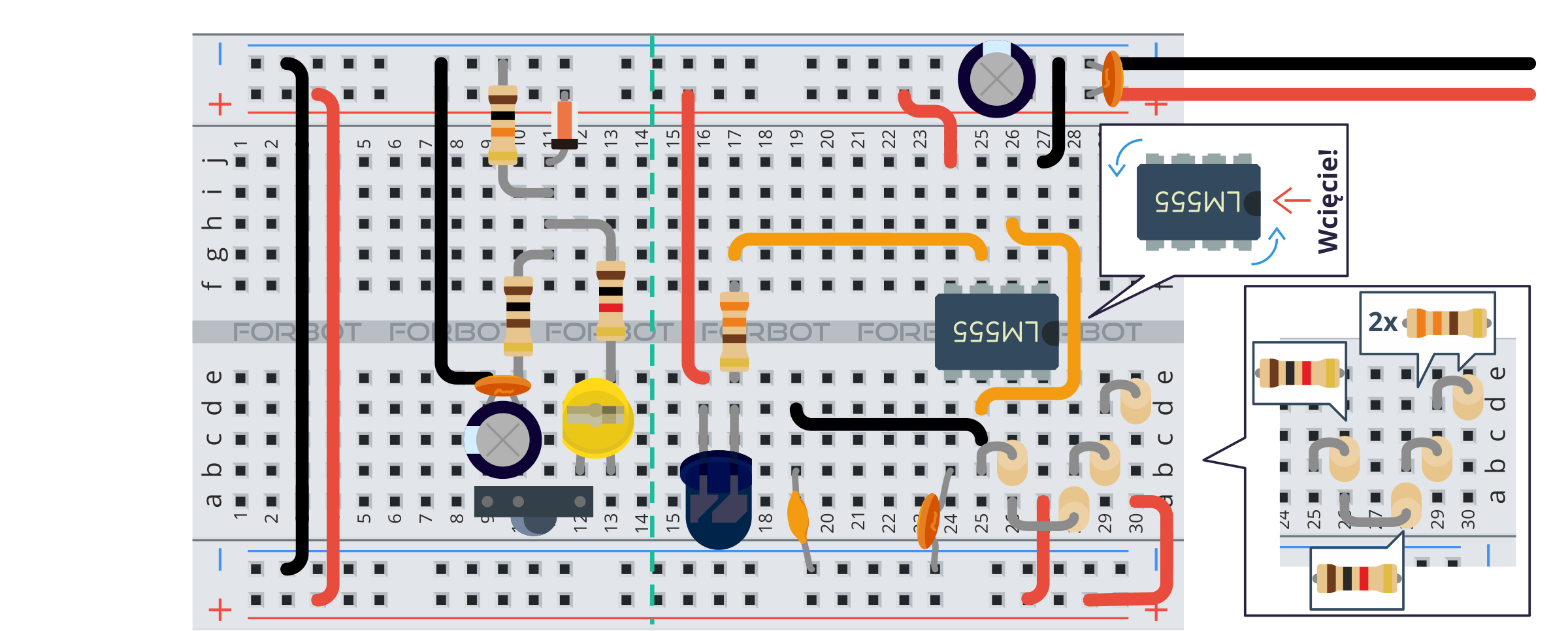
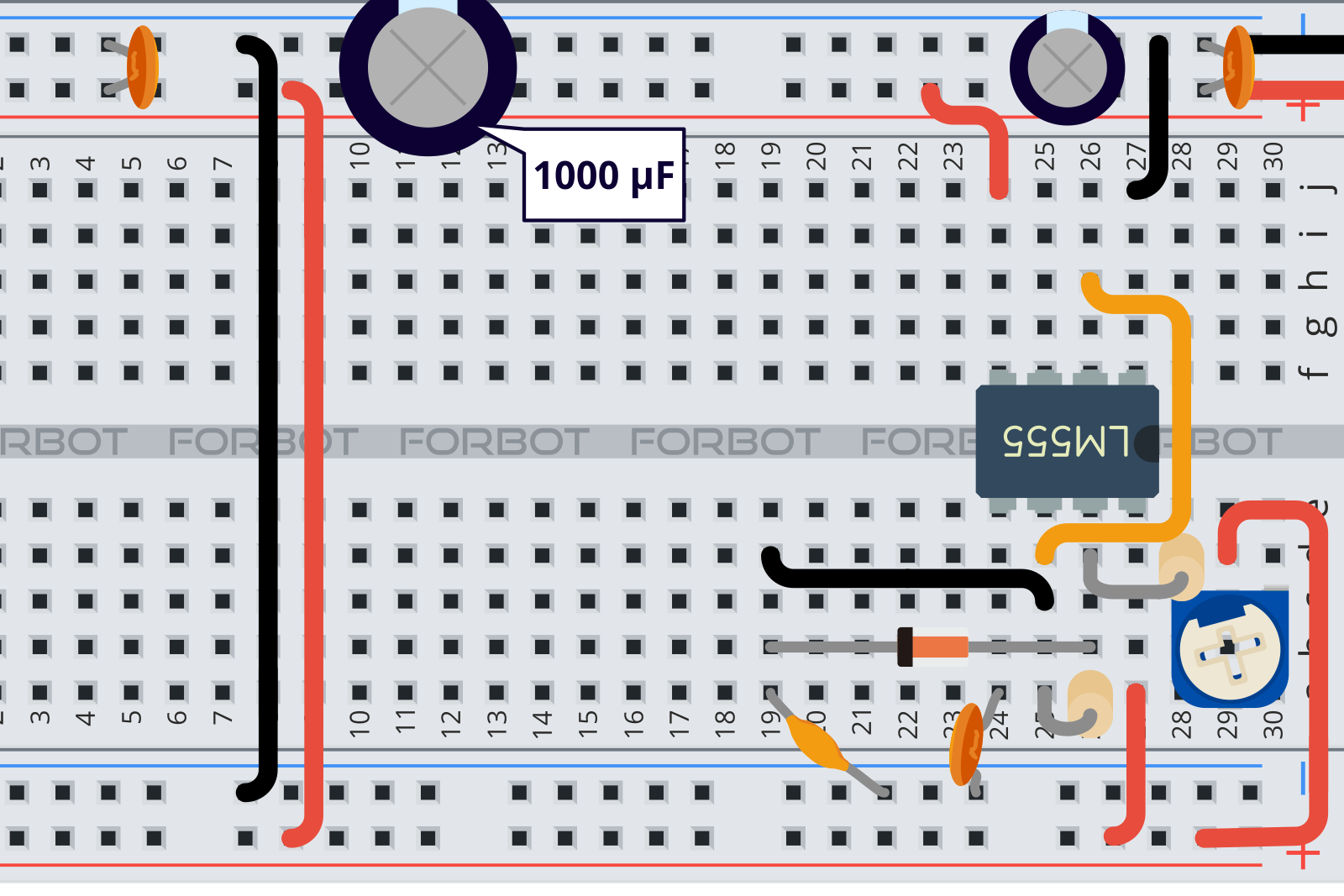
Krok 5. Nóżkę nr 8 podłączamy do dodatniej szyny zasilania. Wtykamy rezystor R1 (1 k), a następnie podłączamy do niego potencjometr. Zależy nam na uzyskaniu regulowanego rezystora, więc wykorzystujemy wyprowadzenie środkowe i jedno ze skrajnych (dowolne). Środkowe wyprowadzenie łączymy z dodatnią szyną zasilania. Dodajemy kondensator C3, łączący piątą nóżkę NE555 z masą.
Krok 6. Łączymy linie zasilania, które są po jednej i po drugiej stronie płytki. Dodajemy kondensatory C5 (100 nF) i C6 (1000 uF). Ustabilizują one zasilanie układu, gdy silnik będzie pobierał większy prąd.
Krok 5: kolejne połączenia
Krok 6: podłączenie serwa i kondensatorów
Na zakończenie podłączamy odpowiednio serwomechanizm – w tym celu wykorzystujemy 3 przewody:
Gotowy układ z podłączonym serwem
Po podłączeniu serwa możemy podłączyć zasilanie (6 V) i przetestować układ. Każda zmiana ustawienia potencjometru powinna przekładać się na zmianę pozycji serwomechanizmu. Wszystko dzięki temu, że zmiana rezystancji potencjometru wpływa na zmianę wypełnienia sygnału PWM.
Ewentualne drżenie osi serwomechanizmu można tłumaczyć wahaniami napięcia zasilającego. Takie spadki napięcia powstają na stykach płytki stykowej oraz podczas rozruchu serwomechanizmu. Dodatkowy kondensator złagodzi ten efekt, ale nie wyeliminuje go w zupełności. Ewentualne mocniejsze drgania (szczególnie w skrajnych pozycjach) są też wynikiem sposobu działania samego serwa – nie trzeba się tym przejmować.
Skąd wzięły się wartości elementów?
Aby sprawnie posługiwać się NE555, należy obliczać wartości kluczowych elementów – w nocie katalogowej tego scalaka podane są odpowiednie wzory. Najważniejsze z nich zostały opisane poniżej. W sieci znaleźć można też ogrom kalkulatorów online, które pomagają w takich obliczeniach. Warto jednak wiedzieć, skąd biorą się wyniki.
Dla konfiguracji monostabilnej
Czas impulsu można obliczyć za pomocą jednego, prostego wzoru:
CzasImpulsu = ln(3) · R · C
Gdzie:
R to wartość rezystancji rezystora,
C to pojemność kondensatora (w faradach),
za ln(3) podstawiamy wartość logarytmu, czyli ~1,1.
Dla konfiguracji astabilnej
W tym układzie wartości elementów zależą od czasu stanu wysokiego i niskiego, który chcemy uzyskać. Wzory są dość proste:
za ln(2) podstawiamy wartość logarytmu, czyli ~0,693.
Odpowiednie przekształcenie wzorów pozwala oczywiście na obliczenie wartości elementów, które umożliwią nam osiągnięcie oczekiwanych parametrów sygnału.
Uważaj na obliczone wartości!
Układy scalone składają się z tranzystorów, które mają swoje ograniczenia. Dlatego prawidłowa praca NE555 nie jest możliwa w każdych warunkach. W dokumentacji znajdują się informacje o tolerowanym zakresie wartości niektórych elementów.
Suma rezystancji Ra i Rb
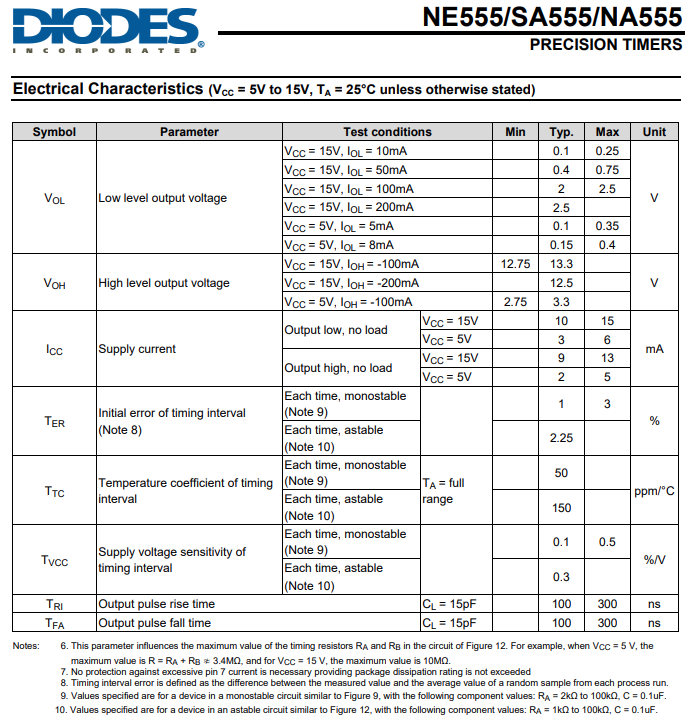
Na przykład w dokumentacji można wyczytać, że dla pracy astabilnej suma rezystancji Ra i Rb nie może przekraczać 10 MΩ przy zasilaniu 15 V lub 3,4 MΩ przy zasilaniu napięciem 5 V. Zaleca się również, aby nie była mniejsza niż 1 kΩ, bo płynący wtedy przez tranzystor rozładowujący prąd robi się już znaczący.
Takie same kryteria można przyjąć również dla układu monostabilnego
z pojedynczym rezystorem.
Charakterystyka elektryczna układu i rekomendowane wartości pasywnych podzespołów
Pojemność kondensatora
Dodatkowe obostrzenie dotyczy też kondensatora służącego do odmierzania czasu: jego pojemność powinna być większa od 1 nF. W przeciwnym razie pojemności wewnętrzne tego układu spowodują zauważalne wydłużenie odmierzanych czasów.
Oprócz znajomości tych reguł warto kierować się zdrowym rozsądkiem. Na ogół ustala się jedną wartość (np. pojemność kondensatora) i dobiera rezystory pod wymagane zależności czasowe. Trzeba pamiętać o tym, że nic nie jest idealne i układ złożony z elementów o obliczonych wartościach może mieć parametry czasowe odbiegające od tych, które obliczyliśmy.
Dlatego warto mieć możliwość doregulowania rezystancji np. potencjometrem.
Pora na quiz - sprawdź, co już wiesz!
Masz już za sobą dziewięć odcinków kursu, więc śmiało możesz zabrać się za kolejny quiz, który składa się z 15 pytań testowych (jednokrotnego wyboru), limit czasu to 15 minut. Liczy się pierwszy wynik, ale quiz będziesz mógł później wykonać wielokrotnie (w ramach treningu).
Bez stresu! postaraj się odpowiedzieć na pytania zgodnie z tym co wiesz, w przypadku ewentualnych problemów skorzystaj ze swoich notatek. To nie są wyścigi - ten quiz ma pomóc w utrwaleniu zdobytej już wiedzy i wyłapaniu ewentualnych tematów, które warto jeszcze powtórzyć. Powodzenia!
Quiz - najnowsze wyniki
Oto wyniki 10 osób, które niedawno wzięły udział w quizie. Teraz pora na Ciebie! Uwaga: wpisy w tej tabeli mogą pojawiać się z opóźnieniem, pełne wyniki są dostępne „na żywo” na stronie tego quizu.
Za nami dwa ciekawe projekty, dzięki którym poznaliśmy praktyczne zastosowanie dla NE555, a takich zastosowań można znaleźć jeszcze wiele. W czasach dużej popularności mikrokontrolerów znaczenie tego układu zmalało, lecz nadal można się nim posługiwać do realizacji prostych zadań. Szczególnie ostatni projekt, czyli tester serwomechanizmów, jest bardzo przydatny.
Co o tym sądzisz? Oceń ten wpis:
Średnia ocena 4.8 / 5. Głosów łącznie: 317
Nikt jeszcze nie głosował, bądź pierwszy!
Artykuł nie był pomocny? Jak możemy go poprawić? Wpisz swoje sugestie poniżej. Jeśli masz pytanie to zadaj je w komentarzu - ten formularz jest anonimowy, nie będziemy mogli Ci odpowiedzieć!
W kolejnej części kursu wrócimy do tematu tranzystorów. Zajmiemy się tranzystorami MOSFET, które sterowane są napięciem, a nie prądem (jak miało to miejsce w przypadku tranzystorów bipolarnych). Elementy te przydadzą się wszędzie tam, gdzie zajdzie potrzeba sterowania przepływem dużego prądu.
Autorzy kursu: Damian Szymański, Michał Kurzela, ilustracje: Piotr Adamczyk. Zakaz kopiowania treści kursów oraz grafik bez zgody FORBOT.pl. Data ostatniego sprawdzenia tego wpisu: 20.07.2026.
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.































Trwa ładowanie komentarzy...