W poprzedniej części kursu STM32 nauczyliśmy się używać linii I/O do komunikacji z otoczeniem. Nadszedł czas na poznanie pierwszego interfejsu, który pozwoli na większą interakcję ze światem.
UART posłuży nam do przesyłania komunikatów między STM32, a komputerem PC.
Uwaga! Ten kurs został zarchiwizowany. Sprawdź najnowszy kurs STM32 »
RS-232, UART, USART - odrobina teorii
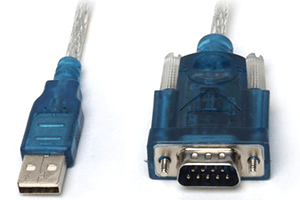
Kiedyś właściwie wszystkie komputery PC były wyposażone w interfejs RS-232. Obecnie USB prawie zupełnie wyparło starszy standard. Złącze szeregowe miało jedną ogromną zaletę – było proste w obsłudze (szczególnie porównując z USB).
Wtyczki USB vs. RS-232
Dlatego w przypadku mikrokontrolerów port szeregowy jest nadal popularny, chociaż coraz częściej w nieco innej postaci. RS-232 działał na dość nietypowych napięciach ±11V (właściwie tolerował od 3V do 15V), dlatego do jego obsługi potrzebny był dodatkowy układ konwertera napięcia np. MAX232.
W typowych mikrokontrolerach stosuje się uproszczoną wersję interfejsu, działającą na napięciach 0V i 3.3V (zamiast wspomnianych wcześniej). Moduł odpowiedzialny za obsługę takiej komunikacji nazywany jest UART (ang. Universal Asynchronous Receiver and Transmitter).
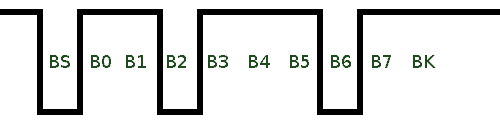
Przykładowa ramka UART
Transmisja rozpoczyna się od bitu startu, zaznaczonego na rysunku jako BS. Zawsze jest to bit będący logicznym zerem. Następnie, zależnie od konfiguracji, następuje po sobie 7, 8 lub 9 bitów danych (tutaj zaznaczone jako B0-B7), które są wysyłaną informacją. Bit stopu (zaznaczony tutaj jako bit BK) to bit będący logiczną jedynką - mówi o końcu transmisji.
Format ramki oraz sposób transmisji jest właściwie niezmieniony względem RS-232.
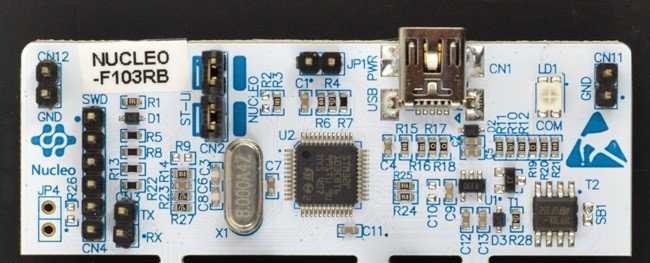
Płytka Nucleo wyposażona jest w konwerter z UART na USB. Nie mamy więc po drodze RS-232, a po podłączeniu do PC, przejściówka będzie widziana jako port COM, czyli nasz port szeregowy.
Część płytki będąca programatorem i przejściówką UART.
Różnice między UART, a USART
UART - Universal Asynchronous Receiver and Transmitter USART - Universal Synchronus and Asynchronous Receiver and Transmitter
W przypadku komputerów PC za obsługę portu szeregowego odpowiedzialny był układ UART, czyli: Universal Asynchronous Receiver and Transmitter.
Nasz STM32 posiada moduł, który może pracować zarówno synchronicznie, jak i asynchronicznie, więc nazwa stała się jeszcze bardziej skomplikowana - USART, Universal Synchronus and Asynchronous Receiver and Transmitter. Używamy jednak tylko komunikacji asynchronicznej, więc obie nazwy możemy traktować jako synonimy.
Możliwość przesyłania danych jest nieoceniona podczas uruchamiania i testowania układów. Można w tym celu wykorzystywać debugger, np. przez interfejs SWD, jednak komunikaty testowe często są niezastąpioną metodą wyszukiwania błędów.
W kolejnych częściach kursu jeszcze wielokrotnie wykorzystamy komunikację przez UART, np. do testowania przetwornika ADC. Dodatkowym plusem komunikacji szeregowej jest możliwość łatwego zastąpienia przejściówki UART - USB modułem radiowym i przesyłanie informacji np. za pomocą Bluetooth lub WiFi.
Gotowe zestawy do kursów Forbota
Komplet elementów Gwarancja pomocy Wysyłka w 24h
Zestaw ponad 120 elementów do przeprowadzenia wszystkich ćwiczeń z kursu można nabyć u naszych dystrybutorów! Dostępne są wersje z płytką Nucleo lub bez niej!
Masz już zestaw? Zarejestruj go wykorzystując dołączony do niego kod. Szczegóły »
Do obserwowania efektów pracy programów z tej części kursu konieczny jest dodatkowy program, terminal, przykładowo może to być darmowy: Tera Term lub Realterm.
Konfiguracja UART na STM32
Jak zwykle pierwszy krok to konfiguracja zegara. STM32 posiada kilka modułów USART, my wykorzystamy USART2, ponieważ jest on podłączony do naszej przejściówki, która znajduje się na płytce. Musimy również skonfigurować alternatywne funkcje pinów.
Pierwsza instrukcja uruchamia zegar funkcji alternatywnych linii I/O, druga uruchamia USART2.
Nie możemy w jednej instrukcji uruchomić obydwu,
ponieważ są to różne linie zegara (APB1 i APB2).
Zanim uruchomimy UART, zmienimy konfigurację linii RX oraz TX. Linia wyjściowa (TX) jest obecna na wyprowadzeniu PA2, a wejście (RX) na PA3. Wyjście skonfigurujemy jako funkcję alternatywną w trybie push-pull, natomiast wejście ustawimy jako pływające (ang. floating), czyli bez rezystora podciągającego. Kod będzie więc wyglądał wtedy następująco:
Prędkość transmisji 115200 jest jedną ze standardowych wartości. Jeśli pojawiałyby się błędy podczas komunikacji, można wykorzystać niższe, np.: 9600 lub 38400.
UART na STM32 - wysyłanie bajtów
Do wysyłania danych służy funkcja USART_SendData. Przyjmuje ona dwa parametry: wykorzystywany interfejs (USART2) oraz wartość (bajt) do wysłania. Jeśli chcemy wysłać np. napis musimy podzielić go na bajty i wysyłać kolejno.
Niestety prędkość wysyłania danych jest mała, więc jeśli po prostu wywołamy USART_SendData, szybko zapełnimy bufor nadawczy, a kolejne dane będą gubione. Przed wysłaniem powinniśmy więc upewnić się, że w buforze nadawczym jest miejsce. W tym celu wykorzystamy funkcję: USART_GetFlagStatus. Procedura wysyłania bajtu będzie miała więc postać:
void send_char(char c)
{
while (USART_GetFlagStatus(USART2, USART_FLAG_TXE) == RESET);
USART_SendData(USART2, c);
}
W pętli while czekamy, aż bufor nadawczy będzie wolny, a następnie wysyłamy dane.
W tej części kursu nie użyjemy przerwań do obsługi komunikacji przez UART. Wrócimy do tego, jeśli będzie później taka potrzeba.
UART na STM32 - wysyłanie ciągu bajtów
Jak wysłać w takim razie cały napis? Możemy wykorzystać np. taką funkcję :
void send_string(const char* s)
{
while (*s)
send_char(*s++);
}
W uproszczeniu, jako argument, przyjmuje ona ciąg znaków (wskaźnik na jego początek, czyli adres pierwszego elementu tablicy), a dalej napis przesyłany jest znak, po znaku.
Teraz możemy napisać program, który będzie wysyłał przez UART cały napis:
while (1) {
send_string("Hello world!\r\n");
}
Znak końca wiersza to nieustający problem w przypadku różnych systemów operacyjnych. System Windows używa dwóch znaków, CR LF (czyli \r\n) natomiast Linux tylko jednego LF (\n). Ponieważ przykłady uruchamiamy na komputerze z systemem Windows, wysyłamy dwa znaki.
Więcej o tym problemie można przeczytać na Wikipedii.
Cały kod realizujący wysyłanie napisu wygląda w sposób następujący:
Potrafimy już wysyłać dane. Teraz czas odebrać transmisję z PC - np.: instrukcje sterujące robotem lub innym urządzeniem. Do odbioru bajtu wykorzystamy funkcję USART_ReceiveData.
Tutaj pojawia się jednak analogiczny problem jak przy wysyłaniu danych. Nie możemy odczytać danych, jeśli w buforze odbiorczym ich nie ma. Zanim wywołamy tę funkcję powinniśmy upewnić się, że coś w buforze jest.
Wykorzystamy do tego tę samą funkcję co poprzednio, czyli: USART_GetFlagStatus. Fragment odbierający dane wygląda następująco:
if (USART_GetFlagStatus(USART2, USART_FLAG_RXNE)) {
char c = USART_ReceiveData(USART2);
}
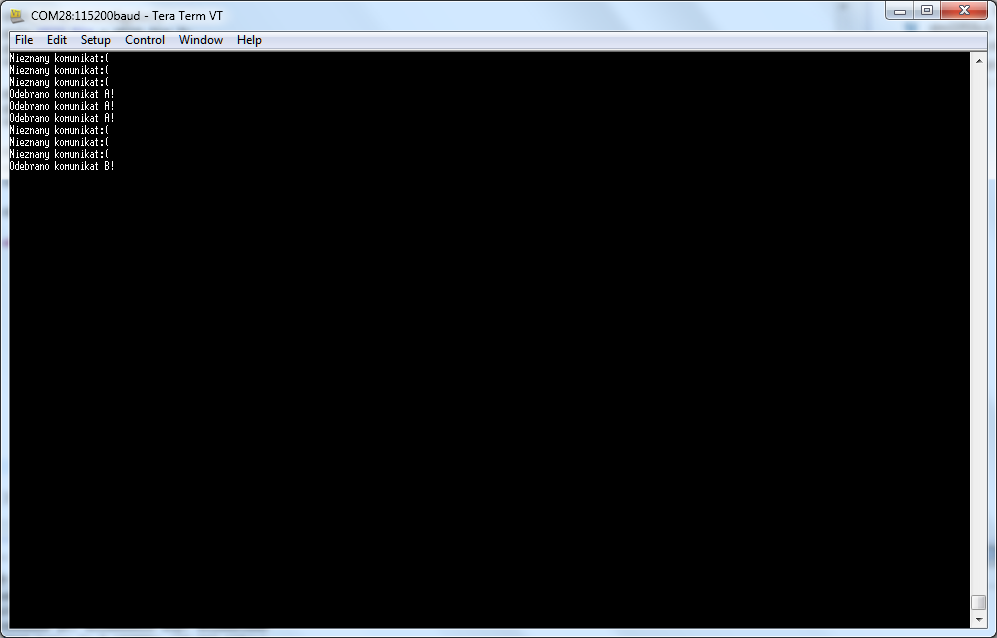
Oczywiście w tym momencie powinniśmy do czegoś wykorzystać zawartość zmiennej c – np. zapisać ją w buforze. Jeśli wystarczy nam bardzo proste sterowanie, po odebraniu znaku możemy wykonać czynność, przykładowo skręcić robotem, zapalić diodę, albo wysłać komunikat.
Działanie programu w praktyce widoczne jest na poniższym zrzucie ekranu:
STM32 - odbieranie danych przez UART.
Zadanie domowe 5.1
Napisz program do sterowania diodami led, np. 'A' zapala diodę 1, 'a' gasi, 'B' zapala diodę 2, itd. Diody podłącz do pinów, które wybierzesz samodzielnie.
Zadanie domowe 5.2
Napisz program, który odbiera kilka znaków, np. 3, zapisuje w buforze, a następnie wykonuje odebrane polecenie, np. „on1” włącza diodę 1, „of2” wyłącza diodę 2.
Zadanie domowe 5.3
Napisz program odbierający znaki, aż do znaku końca linii (\n), a następnie wykonaj polecenie zależne od odebranego ciągu, np. „on 1”, „off 2”.
Przekierowanie printf
Wykorzystując własną funkcję send_string możemy przygotować całkiem sprawną komunikację z PC lub innym mikrokontrolerem. Jednak o wiele wygodniej byłoby wykorzystać standardową instrukcję printf do wypisywania komunikatów na złącze szeregowe.
Funkcja send_string jest bardzo prosta i potrafi jedynie wysyłać ciągi znaków. Funkcja printf daje natomiast możliwość formatowania napisów oraz wyświetlania liczb zarówno całkowitych jak i zmiennopozycyjnych. Jej wykorzystanie jest o wiele łatwiejsze, o czym chyba przekonał się każdy kto programował PC.
Dzięki przekierowaniu wyjścia, będziemy mogli używać printf, a wynik działania pojawi się w oknie terminala portu szeregowego. Dokładnie jak w przypadku programu napisanego na komputerze stacjonarnym.
Dzięki temu będziemy mogli przetestować nieśmiertelny przykład:
printf("Hello world!\n");
UWAGA!
Wykorzystanie printf, chociaż wygodne, powoduje znaczne zwiększenie objętości programu. Jeśli nie jest to absolutnie niezbędne najlepiej unikać wykorzystywania tej funkcji w programach.
Okazuje się, że gdy wywołujemy printf, biblioteka wykonuje za nas mnóstwo pracy związanej z formatowaniem i przetwarzaniem parametrów, a na koniec wywołuje funkcję __io_putchar dla każdego wysyłanego bajtu. Wystarczy więc że napiszemy tę funkcję i printf będzie wysyłał dane na nasz port szeregowy:
int __io_putchar(int c)
{
send_char(c);
return c;
}
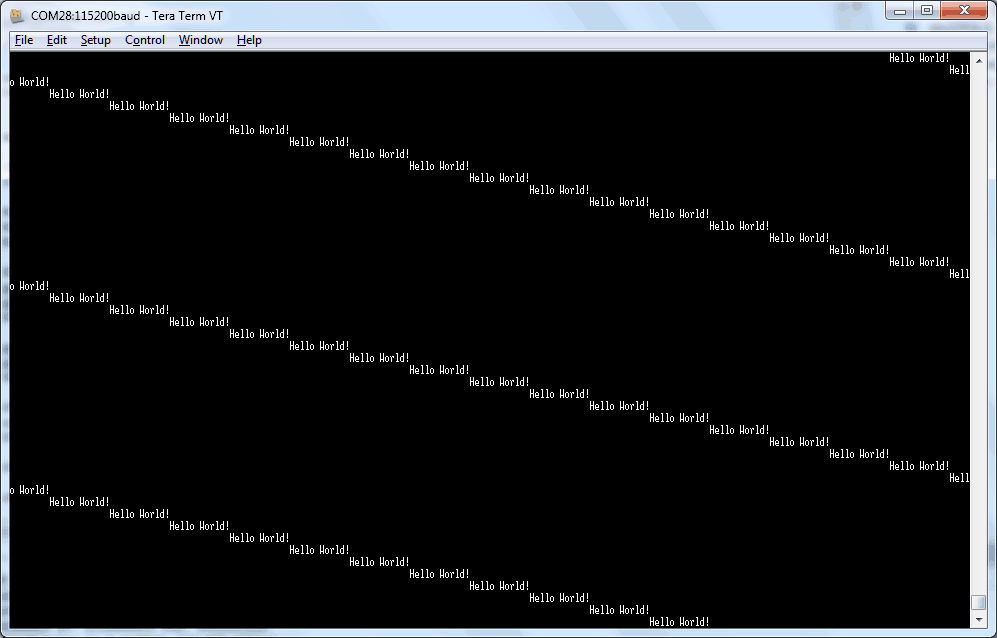
W przypadku Windows możemy zaobserwować dziwne zachowanie na końcu wiersza. W zależności od wykorzystywanego programu do komunikacji, zamiast napisów w kolejnych wierszach możemy zobaczyć schodki. Wynika to z innego sposobu kodowania końców linii w systemach Windows oraz Unix, o którym pisałem wcześniej.
STM32 - błąd wyświetlania danych.
Możemy zmienić komunikat dodając \r\n na końcu (tak jak robiliśmy poprzednio), albo udoskonalić procedurę wysyłającą dane:
int __io_putchar(int c)
{
if (c=='\n')
send_char('\r');
send_char(c);
return c;
}
Osoby, które nie spotkały się wcześniej z printf mogą nie widzieć jej zalet. Możliwości tej pozornie prostej funkcji są całkiem spore. Po więcej informacji warto zajrzeć np.: do manuala. Na zachętę przeprowadźmy szybkie doświadczenie.
Załóżmy, że naszym celem będzie pomiar napięcia przez ADC (o czym w kolejnym odcinku), wynik zaokrąglamy do części całkowitych i wyświetlamy w formie napisu:
Odczytana wartosc to X V!
Oczywiście, za X podstawiamy otrzymaną liczbę. Normalnie musielibyśmy konwertować liczbę, łączyć ją z tekstem lub wysyłać całość w trzech osobnych krokach (napis, wartość i jednostka). Korzystając z właściwości printf możemy zrobić to w jednej linii:
printf("Odczytana wartosc to %d V!\n", 2);
Funkcja ta zamieni wystąpienie %d na cyfrę 2, która została podana jako argument funkcji. Printf pozwala na znacznie więcej operacji, zainteresowanych jeszcze raz odsyłam do manuala.
Wynik powyższego eksperymentu z printf.
Zadanie domowe 5.4
Wykorzystaj właściwości funkcji printf do wyświetlania na ekranie komputera napisu, w którego treści podstawiane są dwie liczby całkowite:
To jest XX cz. kursu STM32, a to jest mój X dzien nauki!
Zadanie domowe 5.5
Wykorzystaj właściwości funkcji printf do wyświetlania na ekranie komputera napisu, w którego treści podstawiana jest liczba zmiennoprzecinkowa oraz całkowita:
To zadanie domowe nr XX, a ten napis wyswietlono juz X razy
Zadanie domowe 5.6
Napisz program działający jak w zadaniu 5.1, ale wykorzystując przerwanie do obsługi odbioru danych. Artykuł nie omawia przerwań od modułu UART, jednak wszystkie informacje są dostępne w dokumentacji mikrokontrolera. Obsługa przerwania jest podobna do omawianej w poprzedniej części kursu.
Podsumowanie
Poznaliśmy postawy komunikacji za pomocą portu szeregowego. Potrafimy wysyłać oraz odbierać komunikaty. W kolejnych częściach kursu wykorzystamy nabyte umiejętności do przesyłania wyników pomiarów, np. wartości odczytanych z przetwornika analogowo-cyfrowego.
Uwaga! Ten kurs został zarchiwizowany. Sprawdź najnowszy kurs STM32 »
Następna część naszego kursu STM32 będzie omawiała wykorzystanie przetwornika ADC. Jeśli nie chcesz przeoczyć kolejnego odcinka, to skorzystaj z poniższego formularza i zapisz się na powiadomienia o nowych publikacjach!
Autor kursu: Piotr (Elvis) Bugalski Redakcja: Damian (Treker) Szymański
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.
























Trwa ładowanie komentarzy...