Wyobraźcie sobie, że po miesiącach ciężkiej pracy ukończyliście swojego robota kroczącego.
Świetnie sprawuje się na bieżni i pora pomału wypuszczać go w teren. Tylko jak przewidzieć wszystkie nierówności i śliskie powierzchnie, nie uszkadzając przy tym robota?
Kiedy widzimy znak "Uwaga! Śliska podłoga" to nastawiamy się na taką powierzchnię i poruszamy się nieco ostrożniej. Tak samo zimą, uważniej stąpamy po lodzie. Naukowcy z UC Berkeley połączyli swoje siły z tymi z ETH Zurich, żeby stworzyć coś na kształt przewidywania terenu. Robot, który potrafi sam poruszać się na czterech kończynach raczej nie należy do tanich i nikt nie chciał, żeby poślizgnął się i złamał "kość".
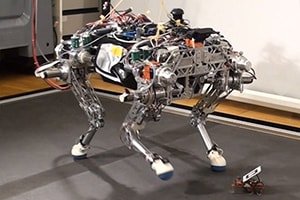
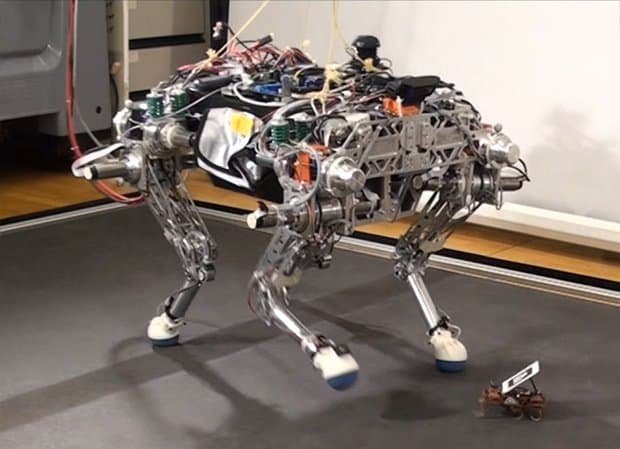
VelociRoACH przeciera szlak dla StarlETH
Dlatego postanowiono poświęcić kilka małych i tanich robocików. To tacy zwiadowcy, którzy sprawdzają teren przed dużym robotem. Ten ostatni za pomocą systemu kamer i odpowiedniego algorytmu śledzi sposób ich poruszania się. Czy robocik przed nim chwieje się, ślizga a może się przykleił? Na podstawie danych wyciągniętych z obserwacji jest w stanie tak dostosować swój chód, żeby nie zrobić sobie krzywdy.
Co jednak może się stać podczas takich testów? Oczywiście małe VelociRoACH mogą zostać zgniecione przez StarlETH, co widać na ostatnim filmiku. Na szczęście żaden robot nie ucierpiał przy jego kręceniu. Te małe konstrukcje są nie tylko tanie, ale również wytrzymałe – po tej krasie po prostu zdjęto z nich StarlETH i maszerowały dzielnie dalej.
Czy ktoś z Was próbował kiedyś testować swoją konstrukcję w podobny sposób? Jak udały się takie testy?
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.






















Trwa ładowanie komentarzy...