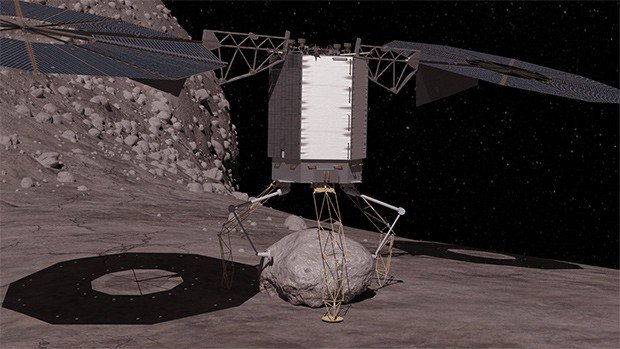
Prace nad prototypami urządzenia zdolnego do takie operacji trwają w Goddard Space Flight Center, usytuowanym w Greenbelt. Do tej pory sprawdzono kilka różnych rozwiązań. Jedno z nich widoczne jest na filmie:
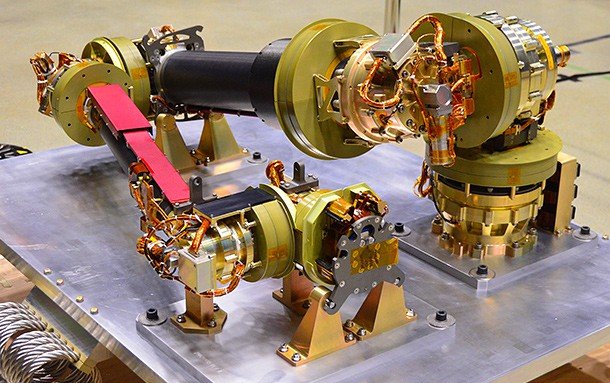
Powyższy filmik jest jednak lekko nie aktualny - obecnie kończyny odpowiedzialne za schwytanie kamienia wyglądem bardziej przypominają roboty przemysłowe:
Który staw to który? Idąc od prawej - bark, łokieć (między czarną a różową częścią) i nadgarstek.
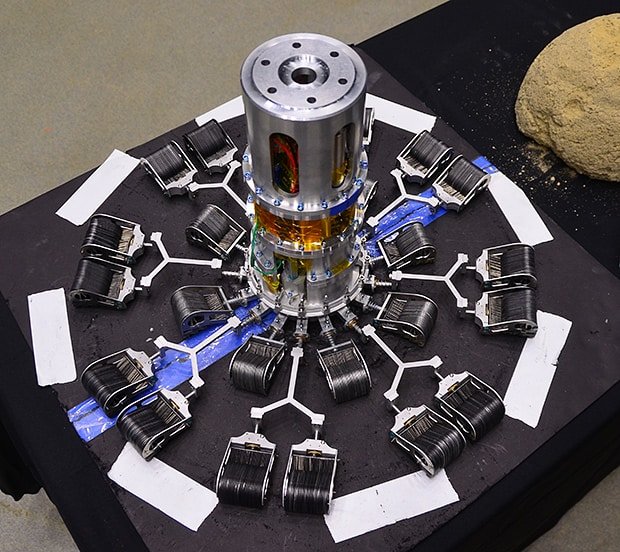
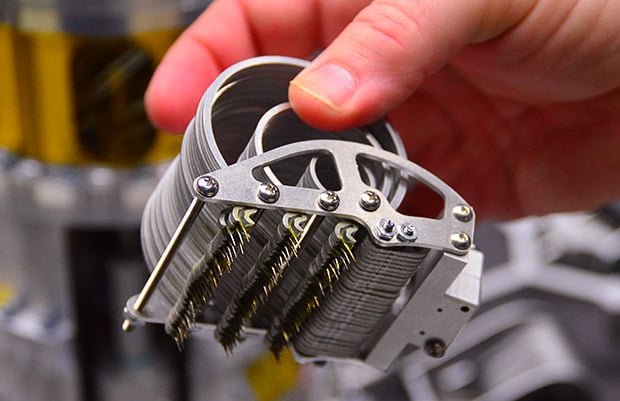
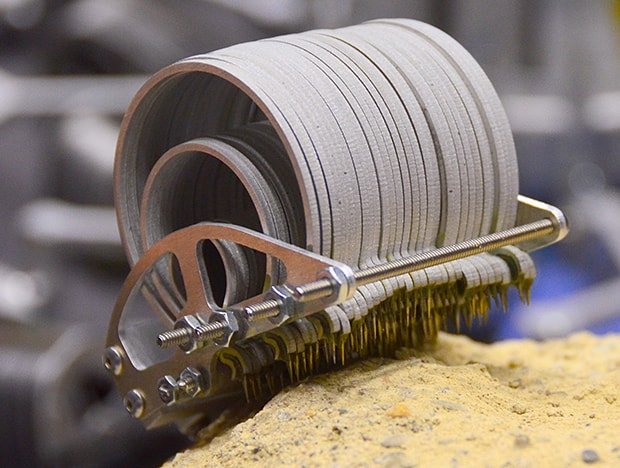
O wiele ciekawszą częścią robota jest jednak sam chwytak, który będzie umieszczony na końcu ramienia. Jak się okazało uchwycenie nieregularnej skały nie jest łatwym zadaniem.
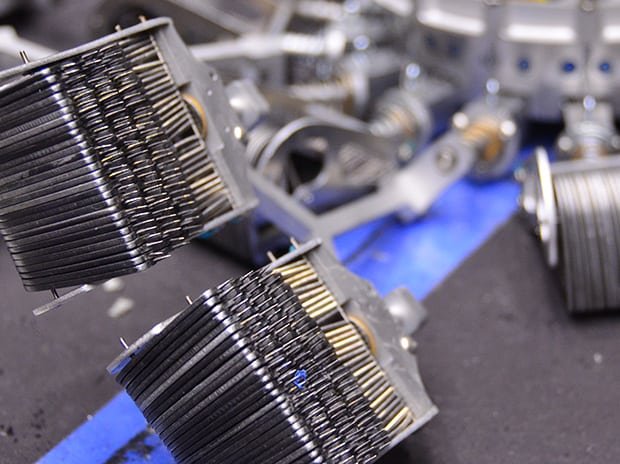
Każdy z "palców" chwytaka składa się z wielu metalowych, sprężynujących części, na końcu których umieszczono trzy kolce. Konstrukcja taka pozwala robotowi na utrzymanie skały w warunkach niskiej grawitacji bez większych problemów.
Rozwiązania te są ewolucyjną wersją podobnych, zastosowanych po raz pierwszy w 2006 przez Sangbae Kim w robocie Spinybot. Zadaniem tego robota nie było jednak podnoszenie rzeczy, lecz wspinanie się za pomocą kolców. Technologię tę rozwinięto i wykorzystano w RiSE od Boston Dynamics, a także w projekcie JPL autorstwa Aarona Parnessa:
Czy te wszystkie technologie i prototypy sprawdzą się w kosmosie dowiemy się dopiero w 2020 r. Jak myślicie - czy coś jeszcze trzeba tu dopracować?
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.






















Trwa ładowanie komentarzy...