Inspiracją dla jego twórców byli skoczkowie do wody, którzy kontrolują swoją rotację w powietrzu. Podczas testów BRICK (Binary Robotic Inertially Controlled bricK) szybko obracał się na śrubie umieszczonej na suficie, a następnie spadał w dół, nadal się kręcąc. Gdy znalazł się w odpowiedniej pozycji i na odpowiedniej wysokości, rotacja zwalniała.
W ten sposób spadająca maszyna przelatywała po drodze przez wąskie, podłużne otwory i trafiała w równie niewielkie cele na podłodze.
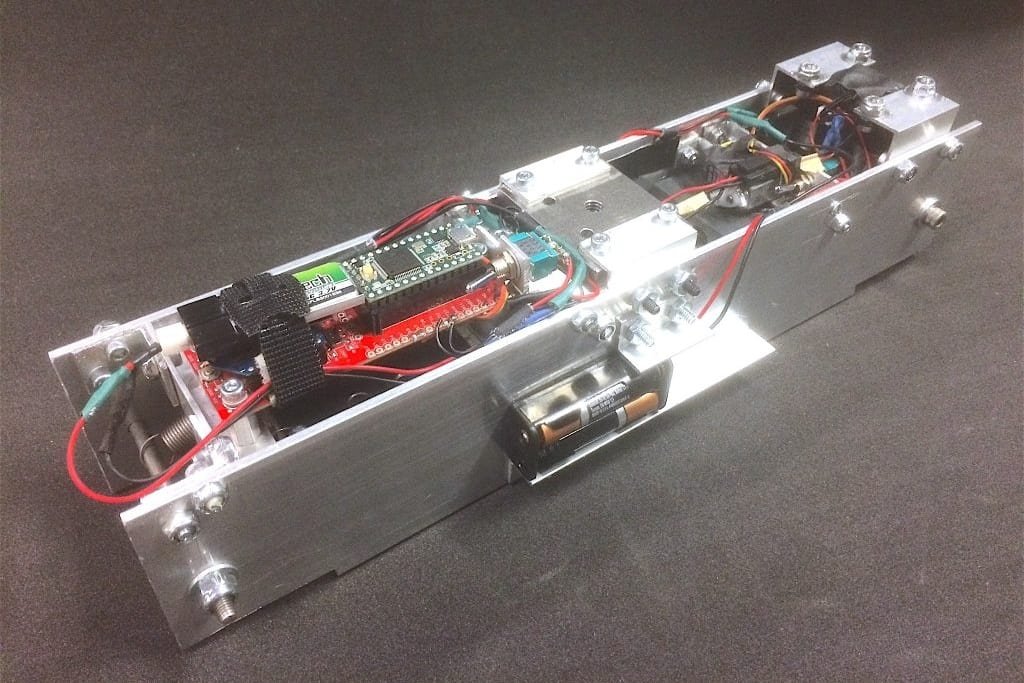
Spowolnienie obrotów w ściśle określonej chwili odbywa się dzięki mechanizmowi składającemu się z dwóch ciężarków. Znajdują się one na sprężynach i na początku są siłą przytrzymane pośrodku konstrukcji, stykając się ze sobą. Po uwolnieniu zatrzasku natychmiast wracają do pozycji na dwóch jej końcach.
Aby znaleźć ten właściwy moment, niezbędne jest określanie własnej pozycji i orientacji przez robota. Umożliwiają to akcelerometr, żyroskop i dalmierz laserowy. Ten ostatni jest zwrócony w dół i wykrywa przeszkody oraz cel.
Eksperymenty okazały się sukcesem. Niezależnie od szybkości rotacji i wysokości upadku BRICK zawsze lądował w uprzednio ustalonej orientacji.
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.






















Trwa ładowanie komentarzy...