Każdy z Was, kto kiedykolwiek grał w Jengę, zapewne przyzna, że ta niepozorna gra bywa dość wymagająca pod kątem zręczności, wyczucia równowagi i zrozumienia podstawowych praw fizyki.
Zadanie polegające na połączeniu informacji z wielu zmysłów, przetworzeniu ich i precyzyjnym wysterowaniu efektorów w zaplanowany sposób to niemal definicja współczesnej robotyki. Prawdziwy problem pojawia się wtedy, gdy zadanie staje się praktycznie niemożliwe do wiernego odwzorowania w symulacji, na której można byłoby testować różne podejścia, algorytmy i rozwiązania mechaniczne.
Robot to ABB IRB 120 ze specjalną przystawką
Grupa naukowców z MIT rozwiązała ten problem w sposób, który doskonale pokrywa się z obecnymi trendami w robotyce - z wykorzystaniem tzw. uczenia maszynowego (ang. machine-learning). Tego typu podejście nie wymaga "sztywnego" zaprogramowania każdego możliwego ruchu, w każdej możliwej sytuacji i z uwzględnieniem każdych możliwych warunków otoczenia.
Uczenie maszynowe wykorzystuje sieci neuronowe, które w tym przypadku niejako wchodzą w interakcję z klockami, obserwują ich zachowania w różnych sytuacjach, popełniają mniej lub bardziej celowe błędy i na tej podstawie budują sobie wzorce przyczynowo-skutkowe (tzw. klastry danych), które wykorzystują później podczas wykonywania zadania.
"Nadgarstek" wyposażono w czujnik siły
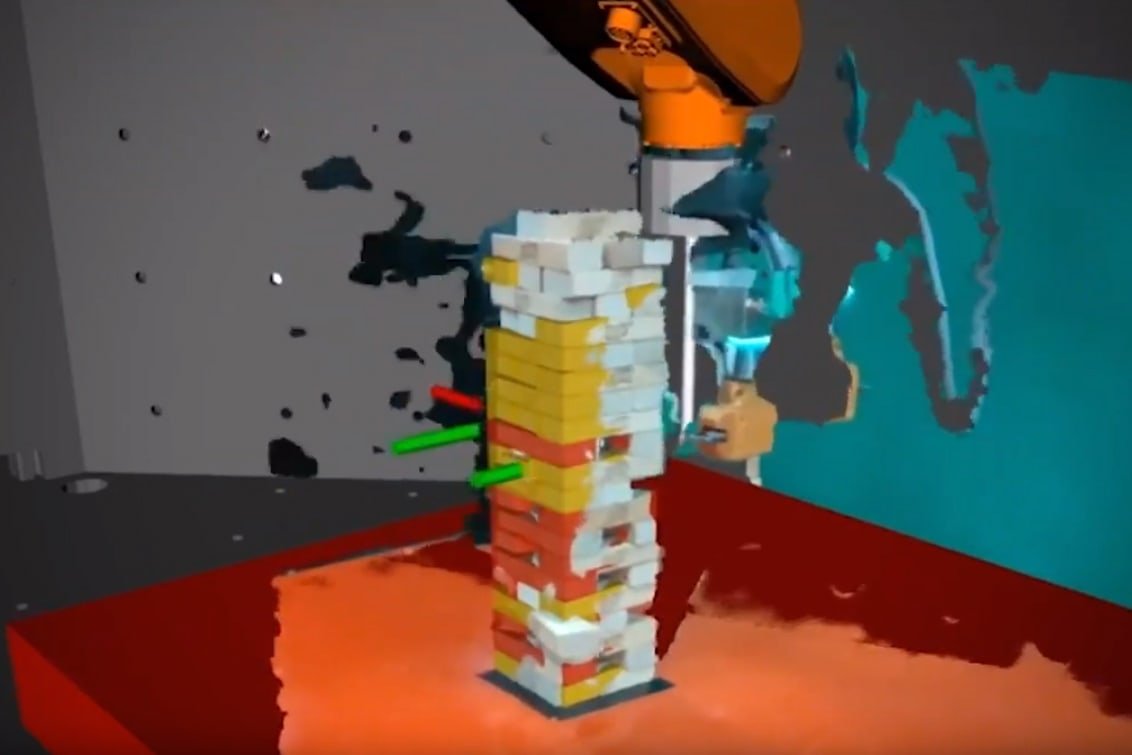
Aby umożliwić wykonanie zadania, robota wyposażono w dwa podstawowe zmysły - wizję maszynową z mapą głębokości z kamery RGBD oraz czujnik siły wbudowany w nadgarstek specjalnego chwytaka. Wizja pozwala w czasie rzeczywistym śledzić zachowanie popychanego klocka oraz wpływ jego ruchu na wieżę, a mierzona siła pomaga zareagować (na podstawie wyuczonych wzorców) i błyskawicznie określić np. czy dotykany klocek jest podatny na wypchnięcie w danym kierunku lub czy nie zakleszczył się podczas przesuwania.
Obraz z wizji komputerowej
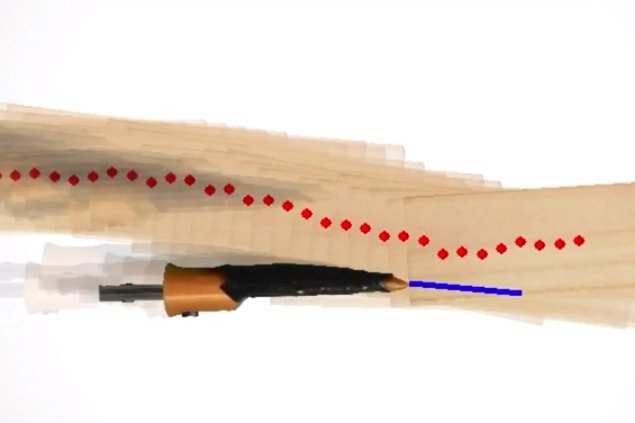
Zachowanie klocka podczas popychania
To, co odróżnia algorytm uczenia z MIT od innych algorytmów tego typu, to bardziej praktyczne podejście do systemu uczenia. Nie trudno jest sobie wyobrazić sytuację, w której robot wykonuje wszystkie możliwe ruchy, przy większości z nich wywracając wieżę, którą następnie ktoś musi ułożyć na nowo - tylko po to, by została przewrócona przy kolejnym ruchu.
Zamiast tego, badania przeprowadzono na pojedynczych klockach, a wyniki podzielono na wspomniane wcześniej klastry. Grupują one np. dane z czujników świadczące o tym, że blok jest mało podatny na popychanie, albo dane wskazujące na niechybne przewrócenie wieży. Dziesiątki tysięcy powtórzeń i budowania wieży udało się ograniczyć do "zaledwie" 300.
Widząc tak złożony projekt i ilość poświęconej mu pracy, wielu z Was zastanawia się pewnie: po co to wszystko? Podobno celem było stworzenie technologii, które pozwolą budować roboty lepiej wykonujące zadania np. na liniach montażowych przedmiotów z zatrzaskami wymagających "wyczucia".
Na chwilę obecną naukowcy pracują nad opracowywaniem różnych strategii, dzięki którym robot niezmordowanie będzie starał się wybierać klocki w sposób utrudniający życie przeciwnikowi i stanie się przez to bardziej wymagającym rywalem do gry.
Badania tomograficzne większości z nas kojarzą się ze szpitalem i drogim sprzętem. Jonathan Whitaker udowadnia, że zalążek tej technologii... Czytaj dalej »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.


























Trwa ładowanie komentarzy...